bandpass variable-bandwidth filter for reconstruction of signals with known boundary in...
TRANSCRIPT

160 IEEE SIGNAL PROCESSING LETTERS, VOL. 11, NO. 2, FEBRUARY 2004
Bandpass Variable-Bandwidth Filter forReconstruction of Signals With KnownBoundary in Time–Frequency Domain
Heyoung Lee, Member, IEEE, and Zeungnam Bien, Member, IEEE
Abstract—A bandpass variable-bandwidth filter (BPVBF) isproposed for the reconstruction of the signal whose boundariesare known in time–frequency domain (TFD). The behaviors of theideal BPVBF are investigated in TFD. Simulation results show thatthe ideal BPVBF rejects noise in the outside of a region of interestin TFD and produces the reliable reconstruction of signals.
Index Terms—Instantaneous bandwidth, instantaneous fre-quency, signal reconstruction, time–frequency analysis, variable-bandwidth filter.
I. INTRODUCTION
MANY natural and man-made signals, such as those usedin communication, radar, sonar, and biomedical mea-
surements, exhibit time-varying spectral properties [1], [2]. Forthose signals, it is known that the instantaneous frequency (IF)and the instantaneous bandwidth (IB) are good descriptors foranalysis and interpretation [2]. Time–frequency representation(TFR) reveals some information such as the IF, the IB and theboundary of each component of a signal [1], [2], [5]. Also,time–frequency (TF) analysis provides an attractive method torend each TF component from a signal [2]. However, the TFRmodified by the binary mask describing a region of interest isnot representable [2], i.e., there may not exist any real signal thatwould produce the masked TFR [2]. One approach to overcomethe difficulties is to employ the least square error method whichconstructs the signal whose TFR is closest to the modified TFRby iteration [2], [7]. Although, the technique is applicable tomany cases that the TFR is represented as a small matrix, it hassome restrictions in the cases of large matrices since the compu-tational load is heavy [2]. Recently, in [3], a simple and efficientlinear time-varying filter has been proposed for the reconstruc-tion of the signal with known IF.
In this letter, a bandpass variable-bandwidth filter (BPVBF)is proposed for the reconstruction of signals. Different from[3], which focuses on the reconstruction of signals with knownIF, the reconstruction of signals boundaries of which are
Manuscript received February 26, 2002; revised October 17, 2002. Thisresearch was supported by the Human-friendly Welfare Robot System Engi-neering Research Center, KAIST. The associate editor coordinating the reviewof this manuscript and approving it for publication was Prof. Xi Zhang.
H. Lee is with the Department of Control and Instrumentation Engineering,Seoul National University of Technology, Seoul 139-743, Korea (e-mail:leehy@ snut.ac.kr)
Z. Bien is with the Department of Electrical Engineering, Korea AdvancedInstitute of Science and Technology, Daejeon 305-701, Korea (e-mail:[email protected])
Digital Object Identifier 10.1109/LSP.2003.819872
known in TFD is considered and the physical interpretation ofthe proposed BPVBF is given. The proposed method can beapplied to the decomposition of a mutlicomponent signal intoits components.
II. FREQUENCY ANALYSIS
To be specific, let a differential operator be defined as [4]
(1)
where is a given bounded positive real function andis a function variable and . Consider a linear quasi-time-invariant (LQTI) system [4] described by
(2)
where is input and is output of the system. and, and , are constant coef-
ficients. With the relation of , we know thatthe characteristic equation of the system with respect to is
since the operatoris linear. The system is stable if the real parts of all the roots ofthe characteristic equation are negative [4].
Now, let us define the extended Fourier transform (EFT)and the inverse extended Fourier transform (IEFT) for thefrequency analysis and the physical interpretation of the LQTIsystem. Consider the function for a givenfunction , , and then let . The func-tion has the inverse function since is positiveand bounded. Let be a set of functions such that
is a Fourier integrable function
with respect to the variable ofintegration
Note that a function such that and, is an example of Fourier integrable func-
tion, where is the Fourier transform of [6]. For afunction and a given function , the EFT and theIEFT are defined as follows [3], [4]:
(3)
(4)
1070-9908/04$20.00 © 2004 IEEE

LEE AND BIEN: BANDPASS VARIABLE-BANDWIDTH FILTER 161
With , the EFT becomes the traditional Fouriertransform. Let be a function whose EFT is denoted as
. Then,
(5)
where is a nonnegative integer. From the definitions of EFTand ,
If vanishes as ,Generally, (5) is established by iterations of the relation with
.The LQTI system (2) can be analyzed by using (5) in EFT
frequency domain. Apply the EFT to both sides of (2). Then, by(5)
(6)
The complex function is the frequency response of(2). The output of (2) is obtained by the IEFT. The physicalmeaning of the extended Fourier frequency variable of (6)depends on the selected function .
III. BANDPASS VARIABLE-BANDWIDTH FILTER
The LQTI system (2) has the characteristic of the variable-bandwidth filter (VBF). The frequency characteristics of thevariable-bandwidth filter (2) are determined by the functionand the constant coefficients and . It is possible to con-struct four kinds of variable-bandwidth filters, i.e., lowpass VBF(LPVBF), highpass VBF (HPVBF), bandpass VBF (BPVBF),and bandstop VBF (BSVBF) depending on the selection of theconstant coefficients and . The cutoff frequencies of theVBFs in the EFT frequency domain are determined by the con-stant coefficients and . For example, the Butterworth poly-nomials can be used for the determination of and in theVBF filters with the characteristic of infinite impulse response.The shape of the pass region of the VBF in TFD is determinedby the function .
In this letter, the analysis of the frequency characteristic fo-cuses attention on the ideal BPVBF constructed by the serialconnection of an ideal LPVBF and an ideal HPVBF. Fig. 1shows a considering ideal BPVBF. Each of the ideal LPVBF andthe ideal HPVBF in Fig. 1 is constructed with differential oper-ators and . The physical meaningsof the frequency variables and depend on the functions
and .Consider the ideal LPVBF constructed by a differential op-
erator with a cutoff frequency . Then, the fre-quency response of the ideal LPVBF is represented by
ifotherwise
(7)
Fig. 1. Ideal BPVBF and pass region. (a) Frequency representation in EFTfrequency domain. (b) Spectrogram of the output when the input is white noise.
in the EFT frequency domain with . From (6), we know thata signal passes through the ideal LPVBF (7) if the EFT of
is
ifotherwise.
(8)
On the other hand, the points in the EFT frequency do-main with correspond to the curves in TFD since
andthe IFs of the complex signals are
[2], [5], where is the Dirac function. Therefore,the pass region of the ideal LPVBF with a cutoff frequency
and a function in the time–frequency plane is
(9)
The ideal LPVBF passes a signal if the support of theTFR corresponding to the signal is bounded by boundaries
in TFD.Similarly, the pass region of the ideal HPVBF with a
cutoff frequency and a function is
(10)
Next, consider the ideal BPVBF constructed by the serialconnection of the ideal LPVBF and the ideal HPVBF shownin Fig. 1. Then, we know that the pass region of the idealBPVBF is
(11)
In (9)–(11), the variable is the Fourier frequency variable.Fig. 1(b) shows the spectrogram of the output of the idealBPVBF whose input is white noise. The cutoff frequenciesare (rad/s) and (rad/s). The kernel functionsused in the simulation are and
162 IEEE SIGNAL PROCESSING LETTERS, VOL. 11, NO. 2, FEBRUARY 2004
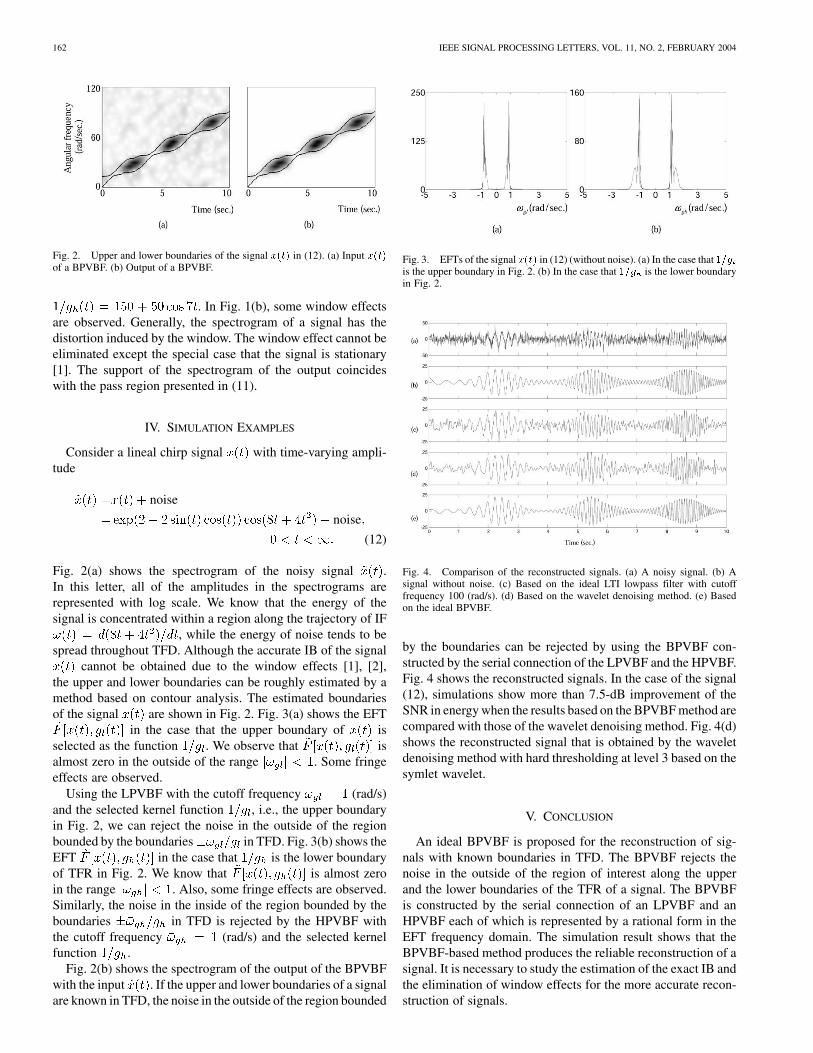
Fig. 2. Upper and lower boundaries of the signal x(t) in (12). (a) Input ~x(t)of a BPVBF. (b) Output of a BPVBF.
. In Fig. 1(b), some window effectsare observed. Generally, the spectrogram of a signal has thedistortion induced by the window. The window effect cannot beeliminated except the special case that the signal is stationary[1]. The support of the spectrogram of the output coincideswith the pass region presented in (11).
IV. SIMULATION EXAMPLES
Consider a lineal chirp signal with time-varying ampli-tude
noise
noise
(12)
Fig. 2(a) shows the spectrogram of the noisy signal .In this letter, all of the amplitudes in the spectrograms arerepresented with log scale. We know that the energy of thesignal is concentrated within a region along the trajectory of IF
, while the energy of noise tends to bespread throughout TFD. Although the accurate IB of the signal
cannot be obtained due to the window effects [1], [2],the upper and lower boundaries can be roughly estimated by amethod based on contour analysis. The estimated boundariesof the signal are shown in Fig. 2. Fig. 3(a) shows the EFT
in the case that the upper boundary of isselected as the function . We observe that isalmost zero in the outside of the range . Some fringeeffects are observed.
Using the LPVBF with the cutoff frequency (rad/s)and the selected kernel function , i.e., the upper boundaryin Fig. 2, we can reject the noise in the outside of the regionbounded by the boundaries in TFD. Fig. 3(b) shows theEFT in the case that is the lower boundaryof TFR in Fig. 2. We know that is almost zeroin the range . Also, some fringe effects are observed.Similarly, the noise in the inside of the region bounded by theboundaries in TFD is rejected by the HPVBF withthe cutoff frequency (rad/s) and the selected kernelfunction .
Fig. 2(b) shows the spectrogram of the output of the BPVBFwith the input . If the upper and lower boundaries of a signalare known in TFD, the noise in the outside of the region bounded
Fig. 3. EFTs of the signal x(t) in (12) (without noise). (a) In the case that 1=gis the upper boundary in Fig. 2. (b) In the case that 1=g is the lower boundaryin Fig. 2.
Fig. 4. Comparison of the reconstructed signals. (a) A noisy signal. (b) Asignal without noise. (c) Based on the ideal LTI lowpass filter with cutofffrequency 100 (rad/s). (d) Based on the wavelet denoising method. (e) Basedon the ideal BPVBF.
by the boundaries can be rejected by using the BPVBF con-structed by the serial connection of the LPVBF and the HPVBF.Fig. 4 shows the reconstructed signals. In the case of the signal(12), simulations show more than 7.5-dB improvement of theSNR in energy when the results based on the BPVBF method arecompared with those of the wavelet denoising method. Fig. 4(d)shows the reconstructed signal that is obtained by the waveletdenoising method with hard thresholding at level 3 based on thesymlet wavelet.
V. CONCLUSION
An ideal BPVBF is proposed for the reconstruction of sig-nals with known boundaries in TFD. The BPVBF rejects thenoise in the outside of the region of interest along the upperand the lower boundaries of the TFR of a signal. The BPVBFis constructed by the serial connection of an LPVBF and anHPVBF each of which is represented by a rational form in theEFT frequency domain. The simulation result shows that theBPVBF-based method produces the reliable reconstruction of asignal. It is necessary to study the estimation of the exact IB andthe elimination of window effects for the more accurate recon-struction of signals.

LEE AND BIEN: BANDPASS VARIABLE-BANDWIDTH FILTER 163
REFERENCES
[1] K. L. Davidson and P. J. Loughlin, “Compensating for window effectsin the calculation of spectrographic instantaneous bandwidth,” IEEETrans. Biomed. Eng., vol. 47, pp. 556–558, Apr. 2000.
[2] S. Qian and D. Chen, Joint Time-Frequency Analysis. Upper SaddleRiver, NJ: Prentice-Hall, 1996.
[3] H. Lee and Z. Bien, “Reconstruction of signals with known instanta-neous frequency using linear time-varying filter,” Electron. Lett., vol.34, pp. 2312–2313, Nov. 1998.
[4] , “On the eigenstructure of linear quasi-time-invariant systems,”Int. J. Syst. Sci., vol. 29, pp. 873–887, Aug. 1998.
[5] L. Cohen, “Time–frequency distributions-a review,” Proc. IEEE, vol. 77,pp. 941–981, July 1989.
[6] A. W. Naylor and G. R. Sell, Linear Operator Theory in Engineeringand Science. New York: Springer-Verlag, 1982.
[7] X.-G. Xia and S. Qian, “Convergence of an iterative time-variant fil-tering based on discrete Gabor transform,” IEEE Trans. Signal Pro-cessing, vol. 47, pp. 2894–2899, Oct. 1999.