backpackable remotely operated underwater vehicle (rov)
TRANSCRIPT

COLORADO STATE UNIVERSITY MECHANICAL ENGINEERING
SENIOR PRACTICUM PROJECTS PROGRAM
Backpackable Remotely Operated Underwater Vehicle (ROV)
Project Plan
September 18, 2012
Team Members
Dondero, Rachel [email protected] ________________________________
Hake, Michael [email protected] ________________________________
Kopacz, Justin [email protected] ________________________________
Romer, Sarah [email protected] ________________________________
Stahler, Luke [email protected] ________________________________
Project Sponsor Signature: ___________________________________________________________

Table of Contents
Introduction and Background ......................................................................................................... 2
Introduction ................................................................................................................................. 2
Background ................................................................................................................................. 2
Problem Statement .......................................................................................................................... 5
Goals and Objectives ...................................................................................................................... 6
Requirements (Constraints and Criteria) ........................................................................................ 7
Work Plan ....................................................................................................................................... 7
Concluding Section ......................................................................................................................... 9
Proposed Budget ............................................................................................................................. 9
References ..................................................................................................................................... 11
Project Plan: Backpackable Remotely Operated Underwater Vehicle (ROV)
2
Introduction and Background
Introduction
The purpose of this project is to design a backpackable remotely operated underwater vehicle
(ROV) which would be used by researchers with limited budgets to explore areas that are
difficult to access and/or too dangerous to explore with human teams.
The design project is sponsored by Corey Jaskolski—president of Hydro Technologies and
National Geographic explorer—who will coordinate design requirements and specifications with
the student design team. Other stakeholders who will be interested in or impacted by the design
include National Geographic, the student design team, Drs. Donahue and Stansloski—course
instructors, the Colorado State University department of mechanical engineering, as well as all
beneficiaries of the vehicle (the science community, those interested in underwater exploration,
etc.).
The major goal of the design is to develop a vehicle that satisfies the driving forces behind the
project as well as all of the customer’s needs. Mainly, this consists of developing an ROV (and
supporting equipment) that is lightweight, robust, and easily portable as it will be trekked
through arduous terrain. The vehicle also needs to be able to withstand pressures at reasonable
depths in addition to a reasonable range in temperature. The design team conducting the project
will consist of five engineering students; three electrical engineering majors will develop, test,
and fine-tune all of the vehicle’s electrical systems while two mechanical engineering majors
will complete the design, analysis, fabrication, and testing of the vehicle.
Background The remotely operated underwater vehicle (ROV) was originally developed by the United States
Navy in 1961 as a means to recover torpedoes lost on the ocean floor. Until the mid-1970s,
various governments were responsible for the funding and development of the majority of the
world’s ROVs; however, 96 percent of the vehicles produced between 1974 and 1982 were
developed, funded, or purchased by private industry [1]. The rise of the private industry within
the ROV market sparked competition. As a result, ROVs were produced at an accelerating rate.
The original driving force behind designing ROVs was to make bigger, more powerful, and
deeper-diving vehicles for deep-sea exploration. In 1990, an ROV developed by the U.S. Navy
reached a depth of 20,000 feet; shortly after, a Japanese ROV reached the bottom of the Mariana

Project Plan: Backpackable Remotely Operated Underwater Vehicle (ROV)
3
Trench (close to 36,000 feet) [1]. As of 2006, there were over 450 builders and developers of
ROVs [1]. Today, ROVs are used for a variety of underwater tasks, from ocean exploration to
underwater oil rig maintenance (see Figure 1 below for an image of an ROV).
Figure 1: Image of an observation-class ROV exploring an undersea volcano [2]
While ROV popularity has ballooned over the past five decades, more than two-thirds of the
world is underwater and has yet to be explored [3]. A small, yet significant, portion of this
unexplored territory lies within difficult terrain, such as alpine lakes and underwater caves. It
would be impossible to transport the majority of current commercial ROVs to these locations due
to their sheer size and weight. In addition, these locations are too dangerous to explore with
human scuba teams. The increased elevation of alpine lakes poses a greater threat of nitrogen
saturation and decompression sickness within the divers [4] and caves are dangerous in their own
regard. Corey Jaskolski, the president of Hydro Technologies (Windsor, CO), is a National
Geographic explorer and has been on expeditions to some of these dangerous locations. Mr.
Jaskolski instituted the Backpackable Underwater ROV Senior Design project because he
recognizes a need in the science community for such a device that is currently unfulfilled by
commercial ROVs. Mr. Jaskolski wants to develop a durable and easily transportable inspection-
class ROV capable of modularly supporting a full-spherical imager that is currently under

Project Plan: Backpackable Remotely Operated Underwater Vehicle (ROV)
4
development. An inspection-class ROV is used to position a video camera and simple sensor
package underwater; it is connected to a small base station via wire tether where it is controlled
by the operators [1], [5]. Mr. Jaskolski believes the device would play a significant role in
discovering new species of organisms, ancient artifacts and remains, and other potentially
historical finds. The backpackable ROV would offer a unique ability to observe environments in
real-time that are currently impossible to view in any cost-effective or practical manner [6].
There are many observation-class ROVs in the world today (around 3,000 in 2006 [1]); many of
these devices satisfy similar needs as the desired ROV of this project. An example of one of
these devices is described in [7]. This ROV minimizes tether diameter by placing batteries
onboard the ROV and by utilizing fiber-optic tether; however, the device has over two
kilometers of tether and would not be backpackable due to its large, cumbersome size. In
contrast, the vehicle described in [3] is very compact and minimizes thruster count to improve
the power-weight ratio of the vehicle; though, this device seems rather fragile (not ideal for
rugged travel) and has an unnecessarily large tether diameter because power is transmitted to the
ROV via the tether.
There are also ROVs that accomplish similar, yet different, results as the desired vehicle of this
project. In addition to traditional invention, ROVs have been the subject matter of many
collegiate competitions throughout the country. [8] is a report that describes one such
competition. The purpose of this particular competition was to design an ROV capable of diving
12 meters, opening some sort of case, and attaching a cable into a port within the case. The
competition ROV is classified as work-class (as opposed to observation-class) because it
performs some function other than positioning a camera underwater. Another work-class ROV is
described in [9]. This ROV is capable of operating light hydraulic equipment to perform various
tasks (such as oil rig maintenance).
In conclusion, it is evident that there are many types of ROVs in the world used for a variety of
reasons; however, there are currently no commercial ROVs that satisfy all of Mr. Jaskolski’s
criteria. The purpose of this project, therefore, is to design a unique ROV capable of being
transported through difficult terrain to capture video and images of unexplored, remote bodies of
water. It is important to note that no applicable standards regarding ROVs were found during the
research for this paper.

Project Plan: Backpackable Remotely Operated Underwater Vehicle (ROV)
5
Problem Statement National Geographic researchers have been exploring the world for decades. Although
technology has evolved greatly since the first expeditions, explorers are still constrained on the
amount of equipment they can take due to the size and weight of their gear. With that said, there
exist bodies of water that are difficult, if not impossible, to explore with current commercial
ROVs due to their sheer size and weight. In addition, these locations are often too dangerous to
explore with human scuba teams. The development of a lightweight and portable ROV would
allow the explorers to remain safely on the surface and would significantly reduce the cost and
risk associated with these treacherous excursions.
The customer, Corey Jaskolski, is the President of Hydro-Technologies and a long-time National
Geographic explorer. He graduated from the Massachusetts Institute of Technology with a
Master’s Degree in Electrical Engineering and Computer science. In 2001, Mr. Jaskolski took
part in an expedition supporting James Cameron’s documentary filming of the Titanic. During
the expedition, Mr. Jaskolski descended to the wreck of the Titanic (12,500 feet) to support
robotic ROV operations [10]. Mr. Jaskolski approached Colorado State University with the
backpackable ROV project. In addition to being the customer, Mr. Jaskolski is serving as the
design team sponsor and is providing the team with a $10,000 budget.
Mr. Jaskolski has been on expeditions to some of the dangerous locations previously mentioned
and recognizes a need in the science community for a lightweight and portable ROV. This need
stems from the fact that currently-available commercial ROVs are large, heavy, and/or
expensive. This project is needed now because there are many difficult-to-access bodies of water
believed to hold historical remains of ancient peoples and societies and a backpackable ROV
would make the exploration of these locations much more practical.
The end-users of the backpackable ROV are researchers with limited budgets wishing to explore
the previously mentioned difficult-to-access bodies of water. As stated above, other stakeholders
who will be interested in or impacted by the design include National Geographic, the student
design team, the senior design course instructors (Dr. Donahue and Dr. Stansloski), the Colorado
State University department of mechanical engineering, the science community, those interested
in underwater exploration, and all other beneficiaries of the vehicle.

Project Plan: Backpackable Remotely Operated Underwater Vehicle (ROV)
6
Goals and Objectives There are several goals that, if satisfied, will lead to satisfaction of the project. The first goal is to
produce an ROV that is capable of diving to a “useful” depth. The corresponding objective is to
maximize the dive depth of the vehicle in a practical manner (see Table 1 below for a complete
list of project objectives). The target depth of 60m is the baseline set by the customer; a vehicle
that can dive deeper than 60m is desired. The next goal is to produce a vehicle that can operate
for a “useful” amount of time. The objective that reflects this goal is to maximize the operable
time of the ROV. The customer desires a vehicle with a work-time of 30 to 60 minutes.
Obviously, the vehicle becomes more useful as its operating time increases; therefore, the goal
and objective is to maximize the ROV’s operating time. The third goal of the project is to create
a vehicle that can withstand a high range of temperatures. The ROV will be used to explore a
wide variety of underwater bodies and, therefore, will likely experience various temperature
extremes. As Table 1 shows, the objective set to attain this goal is to maximize the temperature
tolerance that the vehicle can withstand. The customer has set target values of -10 and 60 .
Finally, the most important goal of the project is to produce a vehicle that can be easily
transported through difficult terrain. Therefore, two pairs of objectives have been set to help
achieve this goal; to minimize: (1) the weight of the vehicle and the corresponding equipment
(tether, topside GUI, etc.) and (2) the size of the vehicle and corresponding equipment. A
maximum weight of 40lbs for both the vehicle and the equipment is desired by the customer.
Maximum linear dimensions of 20”x18”x14” were arbitrarily set by the design team because
they seem like reasonable packable dimensions.
Table 1: Project Objectives
Objective Name Priority Rating Method of
Measurement Objective Direction
Target
Dive Depth 5 Depth (m) Maximize > 60
Operable Time 5 Time (min.) Maximize 30 – 60
Size of Topside 3 Linear Dimensions
(in.) Minimize 20x18x14
Size of Vehicle 3 Linear Dimensions
(in.) Minimize 20x18x14
Temperature Tolerance
4 Temperature ( ) Maximize -10 to 60

Project Plan: Backpackable Remotely Operated Underwater Vehicle (ROV)
7
Weight of Equipment
5 Weight (lb) Minimize < 40
Weight of Vehicle 5 Weight (lb) Minimize < 40
Requirements (Constraints and Criteria) There are several constraints that are required for a successful project; the constraints are
summarized in Table 2 below. Foremost, the ROV needs to be backpackable and robust; this is
the main constraint driving the project. The vehicle will be trekked through jungles and up
mountains and may be checked as luggage on an airliner. Therefore, the ROV needs to be
lightweight and able to endure rough handling. In order to minimize the tether size and weight,
the vehicle must be powered on-board. Therefore, the design team is constrained by designing
around the size and weight of the on-board power source(s) selected. Next, the customer wishes
to attach a full-spherical imager that is currently under development to the vehicle. With that
said, the third project constraint is that the vehicle must be able to modularly support various
payloads (the full-spherical imager, a water sampler, etc.). Finally, the design team is constrained
by the sponsor’s budget ($10,000) and the due date of the project (Colorado State University E-
Days: April 12, 2013).
Table 2: Project Constraints
Constraint Name Method of Measurement Limits
Backpackable and Robust Ability to endure rough handling Hiking, as checked luggage, etc.
Budget Dollars ($) < 10,000
Modular Capability Ability to support modular
payloads Water sampler, full spherical
imager, etc.
On-Board Power Is power supplied on-board the
vehicle? Size and weight of batteries
Time Is the vehicle fully-functional by
E-Days? April 12, 2013
Work Plan In order to verify that the final design should meet the designated objectives and constraints, the
following work plan has been established (see Table 3 below). It lists the design steps necessary
Project Plan: Backpackable Remotely Operated Underwater Vehicle (ROV)
8
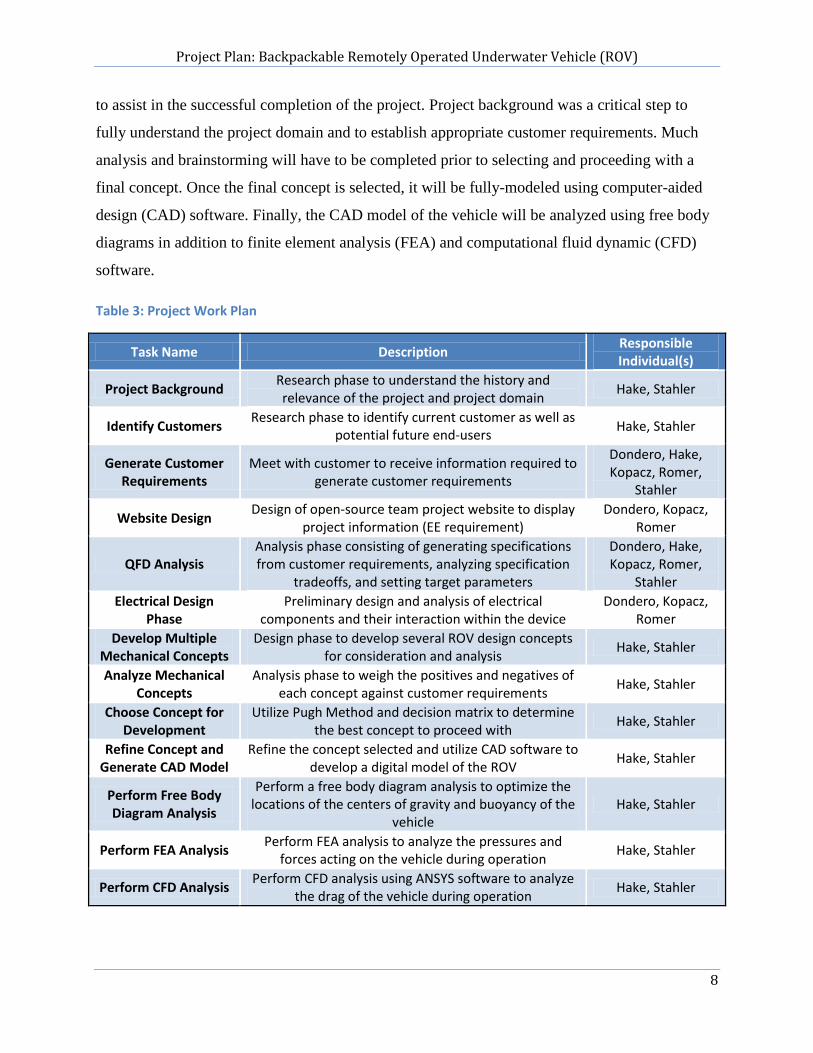
to assist in the successful completion of the project. Project background was a critical step to
fully understand the project domain and to establish appropriate customer requirements. Much
analysis and brainstorming will have to be completed prior to selecting and proceeding with a
final concept. Once the final concept is selected, it will be fully-modeled using computer-aided
design (CAD) software. Finally, the CAD model of the vehicle will be analyzed using free body
diagrams in addition to finite element analysis (FEA) and computational fluid dynamic (CFD)
software.
Table 3: Project Work Plan
Task Name Description Responsible Individual(s)
Project Background Research phase to understand the history and relevance of the project and project domain
Hake, Stahler
Identify Customers Research phase to identify current customer as well as
potential future end-users Hake, Stahler
Generate Customer Requirements
Meet with customer to receive information required to generate customer requirements
Dondero, Hake, Kopacz, Romer,
Stahler
Website Design Design of open-source team project website to display
project information (EE requirement) Dondero, Kopacz,
Romer
QFD Analysis Analysis phase consisting of generating specifications from customer requirements, analyzing specification
tradeoffs, and setting target parameters
Dondero, Hake, Kopacz, Romer,
Stahler
Electrical Design Phase
Preliminary design and analysis of electrical components and their interaction within the device
Dondero, Kopacz, Romer
Develop Multiple Mechanical Concepts
Design phase to develop several ROV design concepts for consideration and analysis
Hake, Stahler
Analyze Mechanical Concepts
Analysis phase to weigh the positives and negatives of each concept against customer requirements
Hake, Stahler
Choose Concept for Development
Utilize Pugh Method and decision matrix to determine the best concept to proceed with
Hake, Stahler
Refine Concept and Generate CAD Model
Refine the concept selected and utilize CAD software to develop a digital model of the ROV
Hake, Stahler
Perform Free Body Diagram Analysis
Perform a free body diagram analysis to optimize the locations of the centers of gravity and buoyancy of the
vehicle Hake, Stahler
Perform FEA Analysis Perform FEA analysis to analyze the pressures and
forces acting on the vehicle during operation Hake, Stahler
Perform CFD Analysis Perform CFD analysis using ANSYS software to analyze
the drag of the vehicle during operation Hake, Stahler

Project Plan: Backpackable Remotely Operated Underwater Vehicle (ROV)
9
Concluding Section The backpackable ROV project offers the design team the opportunity to work with a customer
to solve a “real-world” design problem; however, many challenges will need to be overcome in
order to successfully complete the project. One such challenge will be the multidisciplinary
coordination between the mechanical engineering students and the electrical engineering
students. As with any group of individuals, there are many different personalities, opinions,
strengths, and weaknesses on the team. This challenge must be overcome and the design team
must work well together to meet the requests of the customer. There are many difficult aspects
on both the mechanical and electrical sides of the project. ROVs may seem like simple machines
at a glance, but there are many calculations and analyses that need to be performed in order to
ensure that the vehicle will consistently operate as expected at extreme values of depth and
temperature. Because the backpackable ROV team consists of two smaller teams (mechanical
and electrical), all team members will be challenged with a high work load within their
disciplines. This, however, will allow each team member to gain a vast amount of knowledge
and experience; this will result in a highly rewarding experience for the design team.
Proposed Budget The customer has provided the design team with a comfortable budget of $10,000 for the
production of one, complete ROV system. The motors and batteries have a high initial cost of
purchase but will save the team from spending money on the replacement of “cheap” parts. The
customer’s company, Hydro-Technologies, possesses machines for fabrication and various scrap
material that can potentially be utilized by the team during the project fabrication phase; this will
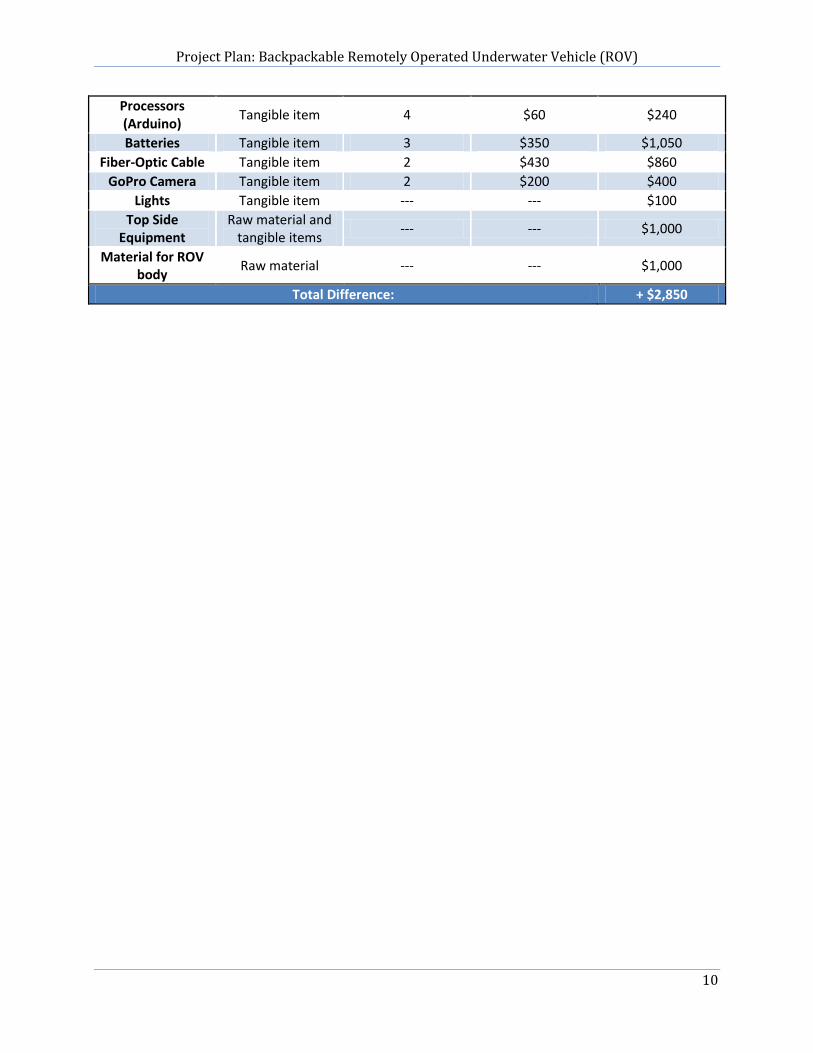
save the design team a considerable amount of money. Table 4 below provides an estimated cost
breakdown for the project. Because the vehicle and topside controller have yet to be designed, it
is unclear how much these components will cost to produce; however, given the projected
budget, the design team has $2,850 of additional funding to assist where needed.
Table 4: Proposed Project Budget
Item Type Quantity Price Per Item Total Value
Income Budget income from sponsor
1 $10,000 + $10,000
Motors Tangible item 4 $600 $2,400
Sensors Tangible item --- --- $100
Project Plan: Backpackable Remotely Operated Underwater Vehicle (ROV)
10
Processors (Arduino)
Tangible item 4 $60 $240
Batteries Tangible item 3 $350 $1,050
Fiber-Optic Cable Tangible item 2 $430 $860
GoPro Camera Tangible item 2 $200 $400
Lights Tangible item --- --- $100
Top Side Equipment
Raw material and tangible items
--- --- $1,000
Material for ROV body
Raw material --- --- $1,000
Total Difference: + $2,850
Project Plan: Backpackable Remotely Operated Underwater Vehicle (ROV)
11
References
[1] R. D. Christ and R. L. Wernli Sr., "The ROV Manual: A User Guide for Observation-Class
Remotely Operated Vehicles," Burlington, Elsevier, 2007, pp. 3-7, 18, 289.
[2] National Geographic, "Pictures: Giant Undersea Volcano Revealed," 15 July 2010. [Online].
Available: http://news.nationalgeographic.com/news/2010/07/photogalleries/100715-giant-
underwater-volcano-indonesia-kawio-barat-science-pictures/#/giant-undersea-volcano-
kawio-barat-rov-water_23441_600x450.jpg. [Accessed 6 September 2012].
[3] C. T. Hawkes, "Remotely Operated Underwater Vehicle". United States of America Patent
7,845,303, 7 December 2012.
[4] T. K. Chamberlain, Oceanography: The Science of the Sea, Mason: Cengage Learning,
2010.
[5] D. D. Huntsman, "Underwater Vehicles". United States of America Patent 6,807,921, 26
October 2004.
[6] J. Klump, R. Paddock, I. Babb and P. Auster, The Evolution and Development of the Small
ROV as an Essential Experimental Tool in Limnological and Coastal Marine Research,
Milwaukee, WI and Groton, CT: University of Wisconsin-Milwaukee, Great Lakes
Wisconsin Aquatic Technical and Environmental Research Institute, and the University of
Connecticut at Avery Point.
[7] D. Weaver, T. Tolman, D. Boyd and S. Dann, "Hybrid Remotely/Autonomously Operated
Underwater Vehicle". United States of America Patent Application 11/806,236, 30 May
2007.
[8] H. Brundage, L. Cooney, E. Huo, H. Lichter, O. Oyebode, P. Sinha, M. Stanway, T.
Stefanov-Wagner, K. Stiehl and D. Walker, Design of an ROV to Compete in the 5th Annual
MATE ROV Competition and Beyond, Cambridge: Massachusettes Institute of Technology,
2006.
[9] Q. Wu, The Development of Seapup (A Light Work Class ROV), Singapore: RACAL
Techno-Transfer Industres Pte LTD, 1997.
[10] Hydro-Technologies, "Hydro-Technologies: About Us," Hydro-Technologies, 2009.
[Online]. Available: http://www.hydro-tech.com/about_us/about_us.htm. [Accessed 15
September 2012].