automated driving at toyota: vision, strategy and...
TRANSCRIPT
AUTOMATED DRIVING AT TOYOTA: VISION, STRATEGY AND DEVELOPMENT
1
AUTOMATEDDRIVINGATTOYOTA:VISION,STRATEGYANDDEVELOPMENT
MESSAGEFROMTOYOTACHIEFSAFETYTECHNOLOGYOFFICERKIYOTAKAISE
1. INTRODUCTION
2. THEFUTUREOFTHEDRIVER–VEHICLERELATIONSHIP
3. WHYTOYOTAISDEVELOPINGAUTOMATEDDRIVINGTECHNOLOGY
4. HOWTOYOTAAPPROACHESAUTOMATEDDRIVINGDEVELOPMENT
5. AUTOMATEDDRIVINGTECHNOLOGYDEPLOYMENTSTRATEGY
6. ELEMENTSOFAUTOMATEDDRIVING
7. CHALLENGESFACINGAUTOMATEDDRIVINGDEVELOPMENT
8. TOYOTA’SAUTOMATEDDRIVINGPROGRAMS,PARTNERSHIPSANDINVESTMENTS
9. AUTOMATEDSAFETYTECHNOLOGYONTOYOTAVEHICLES

2
MESSAGEFROMTOYOTACHIEFSAFETYTECHNOLOGYOFFICERKIYOTAKAISESincethe1990s,Toyotahasengagedinautomateddrivingtechnologyresearchanddevelopmentaimedatcontributingtothecompleteeliminationoftrafficcasualties.Recently,withthecreationoftheToyotaResearchInstitute(TRI)andToyotaConnected(TC),ourautomateddrivingresearchworkisprogressingmuchfasterthanbefore.Wearereleasingthiswhitepaperthatsummarizesouroverallapproachtoautomateddriving,inthehopeitwillhelpexplainourwayofthinking.Vehicleswithautomateddrivingtechnologywillbringmanybenefitstosociety,butoneofthetopprioritiesatToyotaistohelpmakethetrafficenvironmentsafer.Whileit’sagiventhatoneday,carswillbesmartenoughtodriveyou,wethinkbuildingapartnershipbetweenyouandthecarwillbringthegreatestsafetyadvantage.Wecallthisthe“MobilityTeammateConcept.”Byhavingourvehicletechnologiesseamlesslyanticipateandinteractwithhumanbeingsandthetrafficenvironment,wewillgetclosertorealizingafuturewithouttrafficinjuriesorfatalities.Asearlyas2020,someofourcarswillbeequippedwithautomateddrivingtechnologytoenabledriver-supervisedautomateddrivingonhighways.Thesystemwillevaluatetrafficconditions,makedecisionsandtakeactionduringhighwaydriving,basedonthisconcept.Wealsocareaboutbringingautomatedsafetytechnologiestothegreatestnumberofpeopleaspossible.That’swhywewillequipnearlyallournewToyotaandLexusvehiclesintheUnitedStates,EuropeandJapanwithToyotaSafetySenseorLexusSafetySystem+bytheendofthisyear.Asweendeavortoresearchanddevelopautomateddrivingtechnology,wewillcontinuetotransfersomeofwhatwe’velearnedtofutureversionsofthesesafetysystems.Wearededicatedtoafutureofeverbetter,andeversafer,cars,forthebenefitofall.
KiyotakaIse,ChiefSafetyTechnologyOfficerToyotaMotorCorporation
3
1. INTRODUCTION
Morethan80yearsago,ToyotaMotorCorporationbeganwhenToyodaAutomaticLoomWorkscreatedaninternaldepartmenttoinvestigateanewtechnology:automobileengines.KiichiroToyodasawautomobileswouldchangesociety,andheunderstoodwhatmatteredwasnotamachinethatcouldmove,butratherwhatthatmachinecoulddoforhumanmobility. Today,steepdeclinesinthecostofsensors,exponentialgrowthincomputingpower,andarevolutioninthedevelopmentofartificialintelligencesystemsonceagainmeanstechnologyispoisedtorevolutionizemobility.AtToyota,weseethepotentialforautomateddrivingtechnologiestoexpandtheoptionsavailabletohelppeoplegetwheretheywantandneedtobe–safelyandconveniently.Justaswedidsomanydecadesago,weareremakingourcompanytomeetthisnewchallenge.Importantly,justasKiichiroToyodarecognizedin1930,todayweunderstandthetruevalueofferedbythisgroundbreakingtechnologyisnotinthemachinesthemselves,butinwhattheyoffertosociety.Ourultimategoalisnottocreateautonomyforcars,butrathertoexpandautonomyforpeople–tocreateasocietywheremobilityissafe,convenient,enjoyable,andavailabletoeveryone.Aswepursuethisvision,weareguidedbyacommitmenttothesafetyofeveryonewhousesourvehicles–bothinhowweresearch,develop,andvalidatetheperformanceofvehicletechnologyandinhowweaimtobenefitsociety.Inadditiontothetremendouspositivebenefitstheyoffer,carsandtrucksareinvolvedincrashesthatresultinmorethanamillionfatalitiesannuallyontheworld’sroads.OurresearchintoautomateddrivingisinthedirectlineageofToyota’slong-standingfocusonimprovingautomobilesafetyandadvancesourultimateaimofrealizingafuturewithouttrafficinjuriesorfatalities.Thus,weareworkingtoensureconsumersenjoythebenefitsofthisresearchsoonerratherthanlater,includingbymakingactivesafetytechnologyandadvanceddriverassistancesystemsavailableacrossToyotaandLexusvehicles.Forexample,theToyotaSafetySenseandLexusSafetySystem+packagesincludeAutomaticEmergencyBraking,LaneKeepAssistandAutomaticHighBeams.Bytheendof2017,thesepackageswillbeavailableasstandardoroptionalequipmentonnewToyotaandLexusvehiclesinJapan,Europe,andtheUnitedStates.ThisdocumentprovidesacomprehensiveoverviewofToyota’sapproachtoautomateddriving,includingthedualconceptsofGuardianandChauffeurthatguideourresearchandtheMobilityTeammateConceptthatguidesourproductdevelopment.Weintendedittoserveasacentralresourcetoenhanceawarenessofouraccomplishmentstodateandtheworkstilltobedone.Aswithanytechnologyrevolution,theimpactofautomateddrivingwillgowellbeyondcarsandtruckstoincludenewbusinessmodelsandproductcategories,rangingfrommobilityserviceplatformstopersonalroboticssolutions.Majorchallengesremain,butweareinspiredtohelpleadthewaytowardthefutureofmobilityaswecontinuetofocusonenrichinglivesaroundtheworldwithsafeandresponsiblewaysofmovingpeople.
4
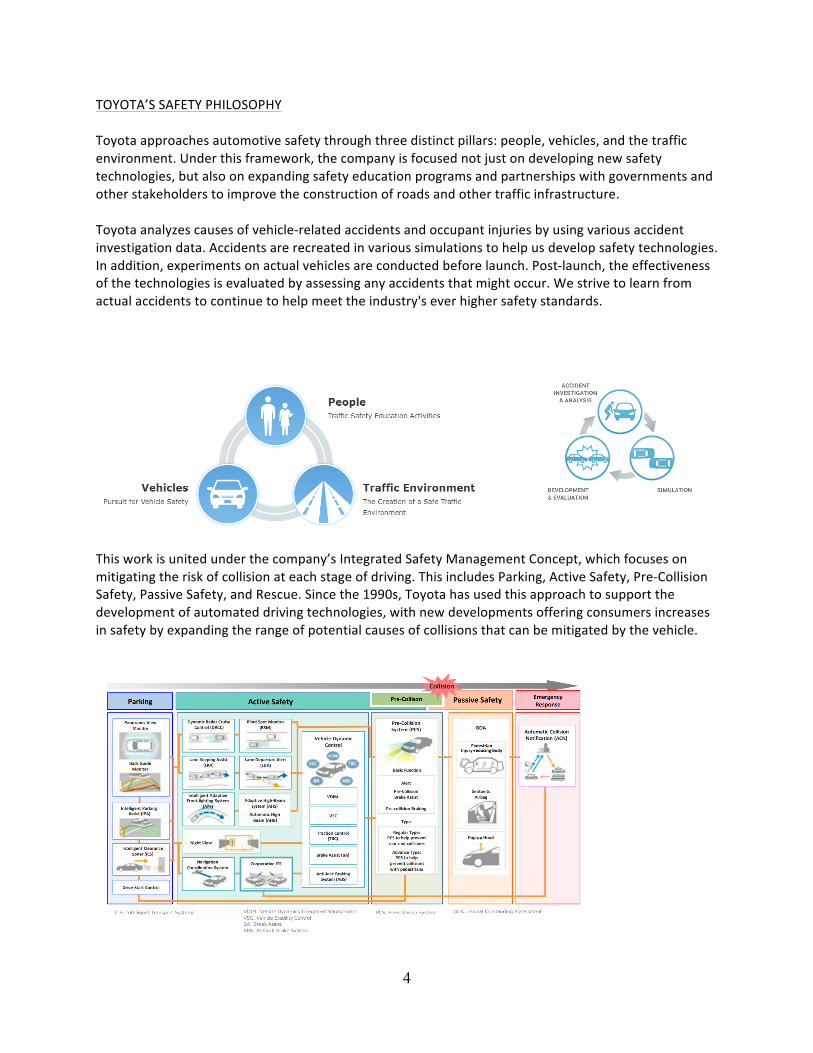
TOYOTA’SSAFETYPHILOSOPHYToyotaapproachesautomotivesafetythroughthreedistinctpillars:people,vehicles,andthetrafficenvironment.Underthisframework,thecompanyisfocusednotjustondevelopingnewsafetytechnologies,butalsoonexpandingsafetyeducationprogramsandpartnershipswithgovernmentsandotherstakeholderstoimprovetheconstructionofroadsandothertrafficinfrastructure.Toyotaanalyzescausesofvehicle-relatedaccidentsandoccupantinjuriesbyusingvariousaccidentinvestigationdata.Accidentsarerecreatedinvarioussimulationstohelpusdevelopsafetytechnologies.Inaddition,experimentsonactualvehiclesareconductedbeforelaunch.Post-launch,theeffectivenessofthetechnologiesisevaluatedbyassessinganyaccidentsthatmightoccur.Westrivetolearnfromactualaccidentstocontinuetohelpmeettheindustry'severhighersafetystandards.
Thisworkisunitedunderthecompany’sIntegratedSafetyManagementConcept,whichfocusesonmitigatingtheriskofcollisionateachstageofdriving.ThisincludesParking,ActiveSafety,Pre-CollisionSafety,PassiveSafety,andRescue.Sincethe1990s,Toyotahasusedthisapproachtosupportthedevelopmentofautomateddrivingtechnologies,withnewdevelopmentsofferingconsumersincreasesinsafetybyexpandingtherangeofpotentialcausesofcollisionsthatcanbemitigatedbythevehicle.

5
2. THEFUTUREOFTHEDRIVER–VEHICLERELATIONSHIP
Forsome,acarisnothingmorethanameansoftransportation,movingpeopleorgoodsfromoneplacetoanotherandnotmuchdifferentthanatrainoraircraft.AtToyota,weseeacarassomethingmore–afeelingweknowpeoplesharearoundtheworld.Indeed,theJapaneselanguagehasawordtodescribethisemotion–“Aisha,”or“Mycar,Iloveit.”Whyisthis?Whatisitaboutcarsthatmakespeoplelovethem?Webelievetherelationshipwithourcarisfundamentallydifferentfromsomuchelseinourlives.It’sasafe,personalspacethatprovidesacomfortableandrelaxingenvironment.Itgrowsandchangestoreflectwhoweare.Theinteriorspace,withfeaturessuchasaudioorentertainmentsystems,andtheexternalappearanceofthevehicleitselfcanbecustomizedtoexpressouruniqueidentity.Atamoresociallevel,carsbelongtofamiliesandaresometimespassedontothenextgeneration.Theygrowwithus;wedon’tdrivethesamecaratage16,20,30,40or60.Eachofthesechangeshelpstobuildadeepandmeaningfulrelationshipbetweenacaranditsowner.Ourcarbecomestheonlyonelikeitintheworld:auniquereflectionofourownlife.Wepamperourcars,abusethem,andusethemextensively.Theycarryourthingsandbearthemarksofourrelationships:astickerhere,acoffeestainthere,andthattimewherewemadeatearinthebackseatandneverbotheredtogetitfixed.Overtime,acarstopsbeingjustamodeoftransportationandbecomessomethingwelove.ForToyota,therelationshipbetweencarsandpeopleisfundamentaltoeverythingwedo,includingourresearchintoautomatedvehicles.Weusetheword“teammate”todescribeourconceptforautomateddriving.Itreflectsourbeliefcaranddrivermusthelpeachothertomakedrivingsafe,comfortable,andfun.Eveninafuturewheredrivinghasbeenautomated,webelievethisrelationshipmeanscarswillcontinuetobelovedandthatautomateddrivingtechnologiescanbringcarsandpeopleevenclosertogether.Whatdoesthisrelationshipmeaninpractice?Whenitcomestosafety,drivingskillsdon’tjustdifferbetweenpeople;theyvaryovertimeforeveryoneaswell.Experience,age,medicalconditions,orsimplefatiguecanallchangeourcapabilityontheroadfrommomenttomoment.That’swhyToyotadesignsautomateddrivingtechnologiestomeettheseshiftingneeds,helpingtosupportsafedrivingregardlessoftheconditionofthedriver.Ofcourse,therearealsopeoplewhowantaspecificdrivingexperienceandexpectthevehicletoperformthewaytheywant,whentheywant.Thatmaymeanasportydrivingmodeinsomesituationsandasmoothrideinothers.Webelieveadvancedvehicletechnologiesshouldrespecttheseuniqueandchangingneedsandrespondwiththecapabilitythatadriverdesireswhilemaintainingtheappropriatelevelofsafetysupport.Inshort,Toyotabelievescarsshouldlearnfromtheirowners,becomingmorelovedastheymeettheirneeds,andgrowtoreflecttheiruniquetastesoverthecourseoftheirlivestogether.

6
3. WHYTOYOTAISDEVELOPINGAUTOMATEDDRIVINGTECHNOLOGYToyotaisguidedbyitsGlobalVision,whichcallsonthecompanyto“leadthewaytothefutureofmobility,enrichinglivesaroundtheworldwiththesafestandmostresponsiblewaysofmovingpeople.”Thismissioninfluenceseverythingwedo,includingmakinghigh-qualitycarsandtrucks,constantlyinnovating,andworkingtosafeguardtheenvironment.Automateddrivingisthenaturalnextstepinourworkasamobilitycompany.Itexpandsupontraditionalautomotivecapabilitiestohelppeoplegettowheretheywantandneedtobe.Toyotabelievesautomateddrivingtechnologieshavethepotentialtobenefitallofsociety,helpingtoeliminatetrafficfatalitiesandinjuries,reshapecities,reduceemissions,andachieveourultimategoal:safeandsmoothmobilityforeveryone.IMPROVINGSAFETYFirstandforemost,Toyotaiscommittedtoautomateddrivingbecausethetechnologyoffersthepromiseofaworldwithalmostnocasualtiesfromcrashes.Atpresent,thereareabout1.3millionworldwidetrafficfatalitiesannuallyandfarmoretrafficinjuries.Automateddrivingtechnologycoulddrasticallyreducethisnumber.Ourworkonthistechnologyfollowsfromourcommitmenttosafedriving,withagoalofdevelopingacarincapableofcausingacrashandthatcanavoidmanycrashescausedbyothervehiclesorexternalfactorsontheroad.ThisfocusonsafetycarriesthroughallofToyota’sresearchanddevelopmentofautomateddrivingsystems.Thismeansextensivetestingandvalidationtohelpensuretheproperperformanceofnewtechnologiesbeforetheirmarketintroductionandafocusonexpandingtheadoptionofpotentiallylife-savingfeatures tonon-fullyautonomousvehicles.MOREEFFICIENTTRANSPORTATIONBeyondtheircoresafetybenefits,automateddrivingsystemsmayhelpmakethetrafficenvironmentsmootherandmoreefficient.Thiscouldprovidemeaningfulimprovementstoairquality,throughreducedemissions,andtothequalityoflifeofdrivers.Thiswouldalsoalloweveryonetocontinuetoenjoythefunofdrivingwhilesignificantlyimprovingthequalityoftimespentinavehicleduringroutinecommutingorlongdrives.Vehicleautomationalsoholdsthepromiseofincreasingaccesstovehicletraveltoalargerportionoftheworld’spopulationthroughaffordable,on-demandmobilitymodels.“Mobility-as-a-Service”(MaaS)willincreasepersonalmobility,especiallyforpeoplewithphysicallimitations,supportingmoreeconomicallyvibrantandefficientcommunities.Thistypeofon-demandtransportationcantransformcities.Forexample,parkingareasinurbancenterscouldberepurposedforpeopleratherthanvehicles,withautonomousMaaSvehicleshelpingcitiesevolveintomoreenvironmentallyfriendlyspaceswithgreatlyreducedemissions,traffic,andnoise.AREVOLUTIONBEYONDCARSToyotabelievesthetechnologybehindautomatedvehicleswillbringsweepingbenefitsthatextendfarbeyondcarsandtrucks.Artificialintelligenceoffersthepotentialtorevolutionizeandimprovethedailylivesofmillionsbycreatingnewcategoriesoftechnologiesandservices.
7
Toyotaleveragesitsresearchintoautomateddrivingtocreatenewsolutions,suchasrobotswithenhancedperception,movementandreasoningthatcanexpandthefreedomofmovementforall,includingpeoplewithlimitedmobilityassociatedwithage,illness,ordisability.Assistiverobots,forexample,canempowerandenablepeoplewhomightotherwiseberestrictedintheirabilitytomovearoundtheirhomesorintheircommunities.Thesesystemsshowpromiseinhelpingseniors“ageinplace”ratherthanmovingintoassistedlivingfacilities–animportantpotentialbenefitgivencurrentdemographictrendsinmanysocieties.
4. HOWTOYOTAAPPROACHESAUTOMATEDDRIVINGDEVELOPMENTDEFINITIONS:AUTOMATEDORAUTONOMOUS?Overdecades,vehicleshavebecomemoreautomated.Directcontroloverkeyfunctions,suchasaccelerationandbraking,isincreasinglyhandledbycomputers.Morerecently,newtechnologieshaveemergedtoperformadditionaltasks,suchashelpingkeepavehicleinitslaneortakingsomecontrolifacollisionisimminent.Withtheriseofsystemsthatcanperformsomeoralldrivingtasks,ahostoftermshaveenteredthemarkettodescribethem.Theseinclude“automated,”“highlyautomated,”“semi-”and“partiallyautonomous,”“self-driving,”and“driverless,”tonameafew.Ingeneral,Toyotausestheword“automated”todescribevehiclefunctionsperformedwithlittleornodirecthumancontrol.Weusetheterm“autonomous”todescribeonlythosevehicleswhereanautomatedsystemcanperformthefull-timedynamicdrivingtask.Bycontrast,muchofwhatiscommonlydescribedasan“autonomousvehicle”isnottruly“autonomous”fromhumanoversightordrivingresponsibility.Careusingthesetermsisimportant,astheirapplicationtovehiclesinthemarketmayimpactconsumerexpectationsandunderstandingabouthowthosevehiclesperform.Asweimplementthesetechnologiesinpassengervehicles,webelieveitismoreappropriatetodescribeaccurately,ortouseterminologythatsuggests,theactualfunctionthevehiclecanperform.Regardlessofwhetheroneprefers“automated”or“autonomous,”justonewordfailstodescribetherangeofresearchintothecapabilitiesoftheseemergingvehicles.Forthat,internationalstandardshavebeendevelopedtoestablishabaseline.STANDARDSFORVEHICLEAUTONOMYTheSAEInternationalstandardJ3016categorizesvehicleautonomybasedonwhetherasystemcanoperateinsomeoralldrivingmodes,andwhetherthedriverorthevehicleisresponsibleforthreecategoriesofdrivingtasks:steeringandacceleration/deceleration;monitoringthedrivingenvironment;andfallbackresponsibilityifthesystemcannotmanagedynamicdrivingtasks.
8
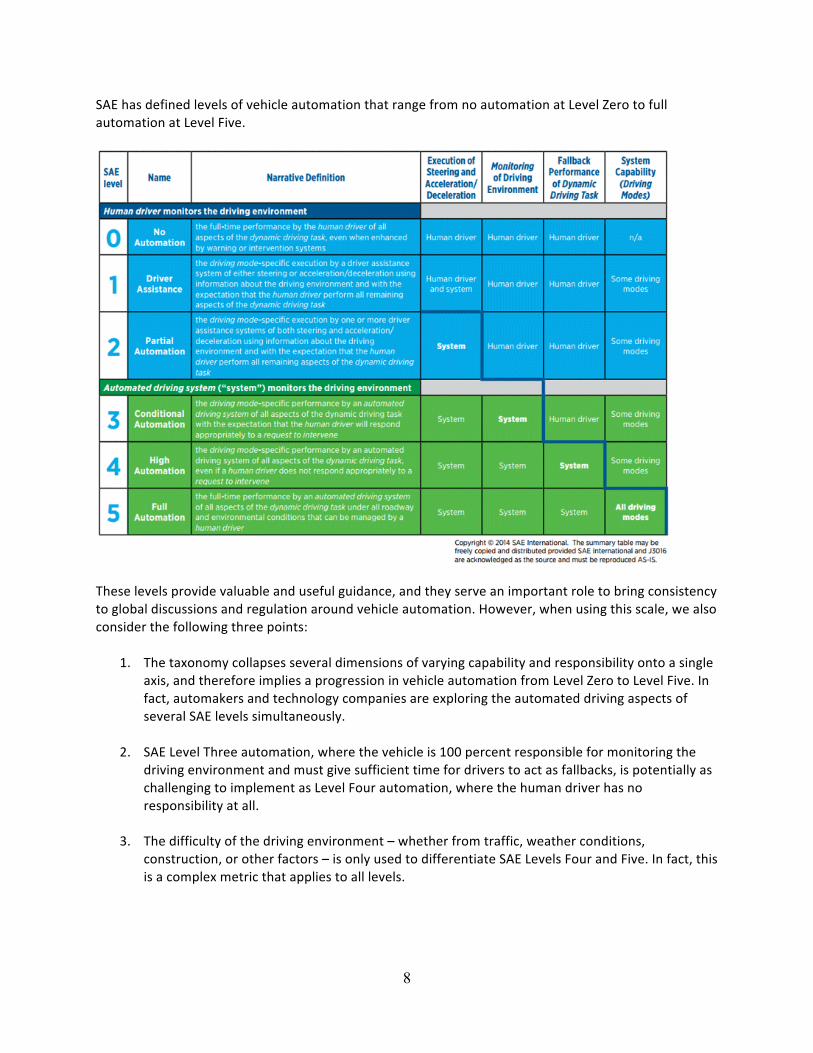
SAEhasdefinedlevelsofvehicleautomationthatrangefromnoautomationatLevelZerotofullautomationatLevelFive.
Theselevelsprovidevaluableandusefulguidance,andtheyserveanimportantroletobringconsistencytoglobaldiscussionsandregulationaroundvehicleautomation.However,whenusingthisscale,wealsoconsiderthefollowingthreepoints:
1. Thetaxonomycollapsesseveraldimensionsofvaryingcapabilityandresponsibilityontoasingleaxis,andthereforeimpliesaprogressioninvehicleautomationfromLevelZerotoLevelFive.Infact,automakersandtechnologycompaniesareexploringtheautomateddrivingaspectsofseveralSAElevelssimultaneously.
2. SAELevelThreeautomation,wherethevehicleis100percentresponsibleformonitoringthedrivingenvironmentandmustgivesufficienttimefordriverstoactasfallbacks,ispotentiallyaschallengingtoimplementasLevelFourautomation,wherethehumandriverhasnoresponsibilityatall.
3. Thedifficultyofthedrivingenvironment–whetherfromtraffic,weatherconditions,
construction,orotherfactors–isonlyusedtodifferentiateSAELevelsFourandFive.Infact,thisisacomplexmetricthatappliestoalllevels.
9
HOWTOYOTATHINKSABOUTVEHICLEAUTOMATIONINITSRESEARCHToyota’sworkisdividedintothreebasicareasofstudy:thecapabilitiesoftheautomateddrivingsystem,thecapabilitiesofthedriver,andthedifficultyofthedrivingenvironment.AutonomyCapabilityInourresearchintoautomateddriving,wefocusontwotypesofcapability–onewecall“Chauffeur”andanotherwecall“Guardian”:
1. ChauffeurCapabilityisameasureofthedegreetowhichthevehicletakesprimaryresponsibilityfordriving,relievingthehumandriverofsomeoralldrivingtasks.IftheChauffeurcapabilityislow,thehumanmayberesponsibleformonitoringtheenvironmentandactingasafallback(similartoSAELevelTwo).Ifthecapabilityisabithigher,thehumandrivermayberesponsibleonlyforactingasafallback(similartoSAELevelThree).IftheChauffeurcapabilityishigh,thehumandrivermayhavenoresponsibilityatall(likeSAELevelsFourandFive).
2. GuardianCapabilityisameasureofhowmuchtheautomateddrivingsystemhelpstoprotectvehicleoccupantswhilethehumanisdriving–bothfrommistakesorothererrorsbythedriverandfromexternalfactorsontheroadsuchasvehicles,obstructions,ortrafficconflicts.ThehighertheGuardiancapability,thegreaterthenumberandtypesofcrashesitcanhelpprotectagainst.Forexample,atamodestlevelofGuardiancapability,systemslikeLaneDepartureAlert(LDA)andAutomaticEmergencyBraking(AEB)canhelppreventsomecrashes.Atthehighestlevel,Guardiancapabilitywouldhelpensureavehicledrivenbyahumanbeingwouldnevercauseacrash,regardlessofanyerrormadebythehumandriver,andsteeravehicletoavoidmanycrashesthatwouldotherwisebecausedbyothervehiclesorexternalfactors.
AlthoughChauffeurandGuardiancapabilitiesreflectdistinctconceptsforautomateddriving,theirdevelopmentbuildsonsimilarperception,prediction,andplanningtechnology.Indeed,thehardwareandsoftwarerequiredforGuardiancapabilityservesasthebackboneforChauffeurcapability.HumanDriverCapabilityandEnvironmentalDifficultyToyota’sworktodevelopautomateddrivingtechnologyisbroaderthanjustthecapabilitiesofthevehicleitself.Italsoconsidersthecapabilityofhumandriversandthedifficultyofthedrivingenvironment.Importantly,drivercapabilityanddrivingdifficultyarenotstatic.Theyinsteadriseandfallovertime–drivercapabilityadjustsbasedonfactorslikeskill,leveloffatigue,andlevelofdistraction;drivingdifficultyshiftsbasedonarangeofissuesincludingweather,traffic,orconstruction.Mostofthetime,drivercapabilitymaybesufficienttopreventacrash.Itisthetimeswhendrivingdifficultyrisesabovethedriver’sskillthatacrashislikely.

10
Automateddrivingoffersthepotentialtohelpoffsetthoseperiodswhendrivingdifficultyishigherthanthedriver’scapabilitytonavigatesafelyandprovidesGuardiancapabilitywhennecessarytohelppreventacrash.What’smore,attimesoflowdrivingdifficulty,automateddrivingmightbeabletoprovideChauffeurcapabilitytorelievethedriverincertainconditions.Atpresent,Guardiancapability’stechnicalabilitiesmightbehigherthanthedriver’sskillonlyinsomecircumstances.Overtime,though,Guardiancapabilitywillgrowsteadilyastechnologyimproves,withagoalofcreatingavehicleneverresponsibleforacrashregardlessoferrorsmadebyahumandriver.Atthesametime,Chauffeurcapabilitywilladvancetowardagoalofbeingabletodrivesafelyinallconditionswithoutanyhumanresponsibilityforsupervisionorfallback.Importantly,drivingenvironmentscanbeextremelycomplexanddifficult,andnoautomateddrivingsystem–regardlessofhowcapableitmaybe–islikelytopreventcrashesentirely.Afundamentalquestionyettobeaddressedis“howsafeissafeenough?”Theanswerwilldependongovernmentregulation,liabilityrisks,societalacceptance,andwhatistechnicallypossible.Ingeneral,webelievesystemsprovidingChauffeurcapabilitywillneedtobesignificantlysaferthanaveragehumandriverstobeacceptedbysociety.Guardiancapability,bycontrast,maybejudgedagainstalowerstandard,whichis,onaverageandasoftenaspossible,to“donoharm.”

11
5. AUTOMATEDDRIVINGTECHNOLOGYDEPLOYMENTSTRATEGYOURGUIDINGDEVELOPMENTPHILOSOPHY:THEMOBILITYTEAMMATECONCEPTToyota’soveralldevelopmentphilosophyforautomateddrivingtechnologyistheMobilityTeammateConcept(MTC),anapproachbuiltonthebeliefpeopleandvehiclescanworktogetherintheserviceofsafe,convenientandefficientmobility.TheMTCcombinesallofToyota’sresearchintoautomateddrivingcapability–theabilityofthehumandriver,anddrivingenvironmentdifficulty–andmergesthemintoavisioninwhichpeopleandvehicle“teamup”tomonitorandhelpeachotherwhenevernecessary.Inthenearterm,thisapproachcapitalizesonthedifferentskillsthathumansandmachinesbringtothechallengeofsafedriving.Indeed,thankstothepowerofconnectedsystemsandcloud-basedtechnology,thissharingofresponsibilitiesmeansintelligentvehicleswillimprovecontinually,witheverycarandtruckbenefitingfromtheexperienceofeachdriver.Astechnologyadvances,MTCwillallowforvehiclestoadaptandexpandtheirsupportbasedonthecapabilitiesofindividualdrivers,includingthosewhomightotherwisebeunabletodrivesafely.Importantly,MTCisaphilosophybuiltonthebeliefpeopleshouldhavechoices.Ratherthanremovinghumansfromanyengagementwiththeirownmobility,thisallowspeopletoenjoythefunandfreedomofdrivingwhenandiftheychoose,whilealsobenefitingfromthecapabilitiesofautomateddrivingwhentheywish.Indeed,underMTC,individualscanchooseChauffeurcapabilityinsomesituations,suchashighwayandlong-distancetravel,orthesupportofGuardiancapabilityinothers,suchasatlowerspeedsoronshortertrips.Finally,MTCexpandsitsfocusonhumanvehicleinteractiontogowellbeyondtherelationshipbetweenautomobileanddriver.Thisincludestheinteractionsamongvehiclesandotherssharingtheroad,includingpedestrians,bicyclists,andotherdrivers.PRIVATELY-OWNEDVEHICLESIn2003,ToyotaintroduceditsfirstmillimeterwaveradarbasedPre-CollisionSystem(PCS).LaterToyotarolledoutthesystemtomore-affordablevehiclessuchasPrius.Developingadvancedtechnologiesfirst,thenfindingwaystobringthemtoamorepopularandaffordablerangeofvehicles,continuestobeToyota’sstrategy.Thistwo-axisapproachalsoappliestoautomateddrivingtechnologies,whichinmanywaysareanextensionofourpreviousworkonadvancedsafetysystemsandwhichsharethesameultimategoalofzerocasualtiesfromtrafficaccidents.
12
TheresultscanbeseenmostclearlyinToyotaSafetySenseandLexusSafetySystem+,whichmakeadvancedsafetytechnologiesavailableasstandardoroptionalequipmentonnewToyotaandLexusvehiclesinJapan,Europe,andtheUnitedStates.Indeed,futuregenerationsofbothsystemswillexpandtoincludeabroaderrangeofautomatedsafetysystemsandtechnologyasresearchanddevelopmentprogresses.Thisapproachofbeginningwithpersonallyownedvehiclesisaprovenandvaluablemethodfortechnologydevelopment,asitspeedstheintroductionofadvancedsystemsthatcanhelpimprovesafety,reduceaccidents,andeasetraffic.Today,thankstorapidcomponentandITtechnologydevelopments,wecanoftenreachmass-vehicledeploymentmuchfaster.Toyotaiscommittedintheneartermtobringingvehicleswithautomateddrivingcapabilitiestomarket.Thisincludestwoplannedvehiclesystems:
● HighwayTeammate,targetedforcommercialavailabilityin2020,isexpectedtoenabledriver-supervisedautomateddrivingonhighways.Thesystemwillevaluatetrafficconditions,makedecisions,andtakeactionduringhighwaydriving.Potentialcapabilitiesincludemergingontoorexitinghighways,maintainingorchanginglanes,andmaintainingdistancesbetweenvehicles.
● UrbanTeammate,targetedforcommercialavailabilityinthe2020s,willbuildonthecapabilities
ofHighwayTeammate.Inadditiontodetectingpedestrians,bicyclesandothervulnerableroadusersinandaroundthevehicle,thesystemisbeingdevelopedtooperateinaccordancewithlocaltrafficregulationsforsurfacestreets,includingnavigatingintersectionsandobeyingtrafficlights.
MOBILITYASASERVICE(MAAS)Throughitsownprogramsandinpartnershipwithvariouscompaniesinthemobilityservicesspace,ToyotaactivelyexploresMaaSmarketsandopportunities.Webelievetheseplatformswillaccelerateautomateddrivingtechnologydevelopmentandhelpbringitsbenefitstopeoplewhocan’tdrive.
13
MaaSaddressesoneofthekeychallengesindevelopingautomatedvehiclesystems–theneedforsignificantdrivingdatatoimprovecoretechnologies.Initialcomponentcostsmeanvehicleswithautomateddrivingsystemsarelikelytobeexpensiveandsellinsmallnumbers.What’smore,thelowusageratesofprivatevehiclesmeaneachwilllikelygeneraterelativelylittledata.WithMaaS,thosecostscanbeamortizedacrossafleet,wherehigherutilizationratesincreasethedatagathered.ToyotabelievesMaaSprovidedbyvehicleswithautomateddrivingsystemscanhelplowercostsperpassengermile,creatingnewwavesofconsumerdemandandavirtuouscycleofaffordablemobility,safetyandconvenience.Itcanalsohelpimproveautomateddrivingtechnologyandsupportgreatersocietalacceptanceandconsumeradoption.Takentogether,thesystemwillbringforwardkeybenefitsofautomateddrivingmuchfasterthanthroughprivateownershipalone.Beyondautomateddriving,MobilityServicesalsoofferpromisingopportunitiesforToyotatoexpandtheservicesitcanoffercustomers.Tothisend,ToyotahasestablishedaMobilityServicePlatformtoenablecollaborationwithavarietyofservicesproviders.
6. ELEMENTSOFAUTOMATEDDRIVING
FUNDAMENTALSOFAUTOMATEDDRIVINGDrivingautomationoperatesthankstotheinteractionofseveralsystemsthatenablethevehicletounderstandthedrivingenvironment,makeintelligentdecisions,andsafelynavigatetoadestination:● LocalizationandMappingdetermineswherethevehicleislocatedwithinitsenvironment.This
requiresbuildingaspecializedmapofthesurroundingenvironment,eitherfromscratchorbydrawingfromabaselineofpriorknowledgethatiswell-understoodandtrustedtobemostlycorrect,andthenlocalizingthevehiclewithinthatmap.Thissystemhelpsavehiclecorrectlyinterpretthedataitssensorsgather.
● PerceptioncombinesinformationfromtheMappingandPositioningsystemwithdatafromvehiclesensors–includingcameras,LIDAR,RADAR,globalpositioningsystems(GPS),andinertialnavigationunits(INU),amongotherinputs–tocollectandinterpretinformationaboutthevehicle’scurrentsituationanditsrelationshiptoitsenvironment.Thisincludesthelocationandmovementofthefullrangeofobstacles,bothstaticanddynamic,includinginfrastructure,vehicles,pedestrians,bicycles,andmore.Theamountandcomplexityofdataforanalysismakesthisoneofthemostchallengingstepsinautomateddriving.
● Predictionhelpsthevehicleimaginewhereothervehicles,pedestrians,bicycles,etc.arelikelytobe
inthefuture.Oftentherearemultiplepossiblepredictions(knownashypotheses).
● Planningdeterminesoneormoresafecoursesoftravelforthevehicle,includingdecisionssuchaswhichlanetotravel,wheretopositionthevehiclerelativetootherdynamicobjects,andhowmuchspacetoaffordobstacles.Critically,thePlanningsystemmustmakedecisionsabouthowtosafelyguidethevehicleunderconditionsofuncertainty,suchaswhenothervehiclesontheroadmaybeblockedfromview,oriftheybehaveinunexpectedways.Multiplehypothesesmayleadtomultiple
14
possibleplans,withtheultimatechoicedependingontheactionsofothervehicles,pedestrians,andmore.
● Controlexecutestheplanneddrivingtrajectoriessetbytheplanningsystem,whichareupdatedconstantlybasedonnewinformation.Thisisaccomplishedusingactuatorsthatdirectvehicledrivefunctions.
● Coordinationcommunicateswithothervehicles,theroadinfrastructure,andclouddatabases.
● ExternalHumanMachineInteraction(e-HMI)managesthecommunicationofinformationbetweenthevehicleandhumansinthetrafficenvironment.Importantly,whilecommunicationbetweendriverandvehicleisobviouslyimportant,particularlyinmanagingthehandoffofcontrol,sotooiscommunicationbetweenthevehicleandhumansoutsidethevehicle,suchasdriversandpedestrians.
KEYTOOLSFORAUTOMATEDDRIVINGAnoverlappingsetofcoretechnologiesandtoolsmakethefundamentalsofautomateddrivingpossible.Theseinclude:● ArtificialIntelligence(AI)isabroadtermfortechnologythatprocessesinformationandmakes
decisionstoachieveacertaingoal.Thismaybeaccomplishedviaarule-basedsystem,suchasifavehicleperceivesastopsignandfollowsaprogrammedcommandtostop,orviamachinelearning,inwhichasystemmightprocesslargevolumesofinformationtodifferentiateacarfromabicycle.
● ComputerVisionistheprocessofgatheringinformationfromsensorsandusingittoperceivethesurroundingenvironment.Thisprocessleveragesartificialintelligencetodrawknowledgefromthedata,identifyinganddifferentiatingindividualelements,suchascars,pedestrians,trees,androads.
● PredictiveAlgorithmsareusedtoanticipatethelikelybehaviorofotherobjectsintheroadenvironment,suchastheexpectedfuturepositionofanothervehicleontheroadbasedonitscurrenttrajectoryandproximitytoothervehicles.
● DecisionAlgorithmschoosethevehicle’sproperpathbasedonthepredictedbehaviorofotherson
theroad.Importantly,decisionalgorithmsmustoperatedespiteuncertainty,whichvariesbasedonconditionsincludingvisibilityandtrafficcongestion.
● Mapsarebaselinerepresentationsofthecoreelementsofthephysicalworldthevehicleoccupies.Theseincludebothhigh-definitionmaps,whichcanbegeneratedaheadoftimeandusedbyavehiclewhenitentersanenvironment,orgeneratedinrealtimeusingalgorithmssuchasSimultaneousLocalizationandMapping(SLAM).
● Sensorsgatherdatafromthedrivingenvironmentorfromthevehicleitself.Theseincludesystems
thatgatherdataabouttheworld,suchasvideocameras,LIDAR,andRADAR;thosethattracklocation,suchasGPS;andthosethatmonitorthemovementofthevehicleitself,suchasinertialmeasurementunits,orwheelspeedandanglemonitors.
15
● Actuatorsareusedtocontrolthephysicaloperationofthevehicle,openingorclosingthethrottle,turningthewheels,orengagingthebrakes.Importantly,whilemuchofautomateddrivingisperformedbycomputersatveryhighspeed,actuatorsarelimitedbyphysicalconstraints,includingvehicledynamicsandthespeedoftheactuatoritself.Thus,automateddrivesystemsmustaccountforthelagbetweenissuingcommandsandthevehicle’sphysicalresponse.
● Simulationisusedtotesttheperformanceofautomateddrivingsoftwareinavirtualenvironment.
Datagatheredfromrealworldtestingisusedtorecreateavarietyoftrafficscenariosinsimulationtotestandmeasuresystemresponseandensureproperoperation.
● V2XCommunicationconsistsofadirectinformationexchangebetweenvehicles,withroadside
trafficmanagementsystems,andwithpedestriansviadigitalshort-rangecommunicationandviacellularnetworks.Thesevehicle-to-vehicle(V2V),andvehicle-to-infrastructure(V2I),andvehicle-to-pedestrian(V2P)communicationsshareinformationaboutroadsignals,signs,roadconditions,andothervehiclesorpedestriansthatmaybedifficulttosee.Theycanalsoalertdriversofapproachingvehicles,pedestrians,redlights,andsloworstationaryvehicles.Vehicle-to-network(V2N)supportsmapdatagenerationandmapdataupdates,aswellasvariouskindsofinformationdeliveryandremotecontrol.Together,V2Xcommunicationsprovideanadditionalmeansforautomatedvehiclestogainknowledgeaboutsurroundingtraffic.Theinformationobtainediscombinedwithdatafromon-boardsensorstoenablethevehicletomakebetterdecisionsforvehiclecontrol,trafficsafety,efficiency,anddriverinteraction.
7. CHALLENGESFACINGAUTOMATEDDRIVINGDEVELOPMENTWefacevariouschallengestorealizeandpopularizeautomateddriving.Theseincludelegal/regulatoryupdates,social-systemreform,andthetimeneededforsocietalacceptance,withthedetailedsituationvaryingbetweencountriesandregions.Automateddrivingtechnologyalsodependsonotherindustriesthatprovidekeytechnologiesthattogethermakeuptheautomateddrivingeco-system.Keysubjects,listedbelow,typicallyreflectgeographicalorculturaldifferences,globally,andregionally.Therefore,onekeyanduniquesuccessfactorforautomateddrivingishowwecollaborateandcooperatewithvariousstakeholderswhoarenotalwaysactorsinthetraditionalautoindustry.Torealizeandpopularizeautomateddriving,weneedtoappreciatetheirexpectations.Industrycollaborationinnon-competitiveareasthatactasafoundationofautomateddrivingsystemsandvehicles,suchasinfrastructureorsocialsystems,isaneffectivewayforward.Forexample,inJapan,SIP(CrossministerialStrategicInnovationPromotionProgram),undertheJapanCabinetOffice,identifiesareasofcollaborativeworkandpromotesresearchanddevelopmentamongrelevantstakeholders.SIPcollaborationscopeincludesdynamicmappingandcybersecurity.Forsometechnologies,regionalorglobalharmonizationandcollaborationacrossborderswouldberequiredtoestablishacommonsharedfoundation.Withsuchafoundation,wecanaccelerateourtechnologydevelopmenttowardsimprovingourcustomers’safety,andtowardenhancingfreedomandefficiencyofmobility.

16
LEGAL/REGULATORYFRAMEWORKCHALLENGES• Infrastructure(TrafficDesignandManagement,RoadConstruction)• Cybersecurity• DataPrivacy• SafetyAssurance(Design,Construction,Performance)• Social System (Vehicle Registration, Licensing, Driving Education and Training, Traffic Rules,
Insurance,LawEnforcement,CrashInvestigation,SafetyandEmissionInspectionsetc.)SOCIALCHALLENGES• RegionalDifferences(Custom&Behavior,TacitDrivingMannerandRules,EthicalPerceptions).• SocialAcceptance(SafetyConcerns)• Sustainablesolutions(SmartCities,UrbanPlanning). TOYOTA’SAUTOMATEDDRIVINGPROGRAMS,PARTNERSHIPSANDINVESTMENTSTOYOTACOMPANIESWORKINGONAUTOMATEDDRIVINGTECHNOLOGYJAPAN
• ToyotaMotorCorporation:TMC’sAdvancedR&DandEngineeringCompanyleadsthecompany’seffortstodevelopautomateddrivingtechnologiesatthegloballevel,pullingtogethertheresourcesandworkofalltheotherentitieslistedhere,inadditiontoorganizingtheresearch,development,andtestingofthesetechnologiesbyallrelevantfunctionsatToyotaMotorCorporation.
● ToyotaCentralResearch&DevelopmentLaboratories:ToyotaCRDLcontributestothepresentandfuturebusinessesoftheToyotaGroupbyconductingresearchinavarietyoffields.Atthesametime,itsurveysglobaltechnologytrendsandexploresnewfieldsofsciencetoproposeavisionofthefuturethatwillleadtonewbusinesseswhilecontributingtotheadvancementofscience,technology,andindustry.
NORTHAMERICA
● ToyotaResearchInstitute(TRI):ToyotaResearchInstituteisawhollyownedsubsidiaryofToyotaMotorNorthAmericaunderthedirectionofDr.GillPratt.Thecompany,establishedin2015,aimstostrengthenToyota’sresearchstructureandhasfourinitialmandates:1)enhancethesafetyofautomobiles,2)increaseaccesstocarstothosewhootherwisecannotdrive,3)translateToyota’sexpertiseincreatingproductsforoutdoormobilityintoproductsforindoormobility,and4)acceleratescientificdiscoverybyapplyingtechniquesfromartificialintelligenceandmachinelearning.

17
● ToyotaMotorNorthAmericaResearchandDevelopment(TMNAR&D):TMNAR&DhasbeenthedrivingforcebehindToyota'sNorthAmericanengineeringandresearchanddevelopmentactivities.BasedinYorkTownship,Mich.,TMNAR&Dengineers,scientistsandtechniciansworkprimarilyinthreemainareas:productdevelopment,advancedresearchandevaluation,andcrashworthiness.
● ToyotaCollaborativeSafetyResearchCenter(CSRC):CSRCpartnerswithleadinguniversities,
hospitals,researchinstitutionsandfederalagencies,withafocusonsafetyresearchprojectsaimedatdevelopingandbringingtomarketnewandadvancedsafetytechnologies.Researchareasincludeactive/passiveintegration,humanexperience,driverstatedetection,andbigdata/safetyanalytics,withtheresultssharedpubliclywithothercompaniesandacademia.
● ToyotaConnected:ToyotaConnectedlaunchedin2016withtwomandates:1)delivering
seamlessandcontextualservicesand2)usingcutting-edgedataanalyticstosupportproductdevelopmentforcustomers,dealers,distributors,andpartners.ToyotaConnectedprovidesarangeofdataandcomputerscienceservicesacrossToyota’soperations,includingsupportforongoingresearchintoartificialintelligenceandroboticsandtheToyotaResearchInstitute.ToyotaConnectedisbasedinTexasandJapan.
● ToyotaInfoTechnologyCenter:ToyotaInfoTechnologyCenter,U.S.A.,Inc.,isawhollyowned
subsidiaryofToyotaMotorCorporationandhasfiveresearchdivisions:NextGenerationMobilityandSocietyResearch,Cloud/InfraArchitecture,IntelligentComputing,Network,andSystem&Software.Projectsincludenextgenerationcloudplatformresearch,AIbaseddistributedprocessinganddataanalysisplatformresearch,andintelligentvehiclecommunicationnetworkresearch.ThecompanyhasheadquartersinCaliforniaandJapan.
EUROPE
● ToyotaResearchonAutomatedCarsinEurope(TRACE)ToyotaMotorEurope’sAdvancedResearchteaminBrusselscollaborateswithexpertsacrossEuropeinthefieldofcomputervisionforautomatedcars.ItisorganizedlooselyaroundalabstructurenamedTRACE(ToyotaResearchonAutomatedCarsinEurope).CurrentpartnersincludeKULeuven,UniversityofCambridge,CTUPrague,MaxPlanckInstituteSaarbrücken,andETHinZürich.Eachpartnercontributeswithuniqueresearchalgorithms,andallelementsareintegratedintotheexperimentalvehiclesundertheresponsibilityofKULeuven.Currentactivitiesincludestate-of-the-artdeeplearningalgorithmsforobjectdetection,robustandprecisetrackingandfullscenesegmentationandclassification.Monocularandstereo-cameraalgorithmsprovidelong-rangedepthmeasurements.Theobjectiveisrealtime-freespaceestimationforpathplanningandvehiclecontrol.
18
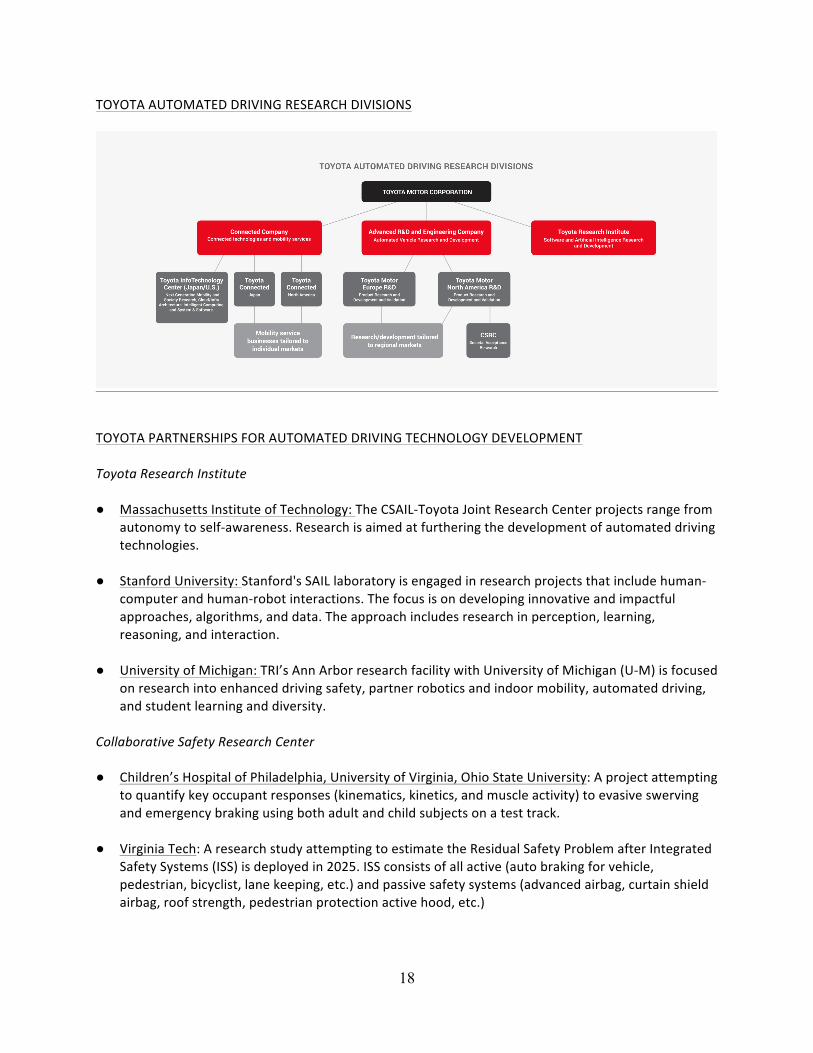
TOYOTAAUTOMATEDDRIVINGRESEARCHDIVISIONS
TOYOTAPARTNERSHIPSFORAUTOMATEDDRIVINGTECHNOLOGYDEVELOPMENTToyotaResearchInstitute● MassachusettsInstituteofTechnology:TheCSAIL-ToyotaJointResearchCenterprojectsrangefrom
autonomytoself-awareness.Researchisaimedatfurtheringthedevelopmentofautomateddrivingtechnologies.
● StanfordUniversity:Stanford'sSAILlaboratoryisengagedinresearchprojectsthatincludehuman-
computerandhuman-robotinteractions.Thefocusisondevelopinginnovativeandimpactfulapproaches,algorithms,anddata.Theapproachincludesresearchinperception,learning,reasoning,andinteraction.
● UniversityofMichigan:TRI’sAnnArborresearchfacilitywithUniversityofMichigan(U-M)isfocused
onresearchintoenhanceddrivingsafety,partnerroboticsandindoormobility,automateddriving,andstudentlearninganddiversity.
CollaborativeSafetyResearchCenter● Children’sHospitalofPhiladelphia,UniversityofVirginia,OhioStateUniversity:Aprojectattempting
toquantifykeyoccupantresponses(kinematics,kinetics,andmuscleactivity)toevasiveswervingandemergencybrakingusingbothadultandchildsubjectsonatesttrack.
● VirginiaTech:AresearchstudyattemptingtoestimatetheResidualSafetyProblemafterIntegrated
SafetySystems(ISS)isdeployedin2025.ISSconsistsofallactive(autobrakingforvehicle,pedestrian,bicyclist,lanekeeping,etc.)andpassivesafetysystems(advancedairbag,curtainshieldairbag,roofstrength,pedestrianprotectionactivehood,etc.)
19
● UniversityofMichiganTransportationResearchInstitute:AninvestigationintokinematicsofminimallyawareadultoccupantsexposedtoAutomaticEmergencyBraking(AEB)andevasivemaneuversonatesttrack.
● UniversityofIowa:Researchattemptingtomeasuretheresponsecharacteristicsandestimated
benefitwithrespecttoreductionininjury/fatalitiesofadaptiveheadlampsystemthathighlightsdetectedpedestriansandbicyclistsusingbothdriverandpedestrian/bicyclesimulatorstudy
● TASI–IndianaUniversity,PurdueUniversityatIndianapolis:Aprojectattemptingtodeveloptest
scenariosandmethodsfortheevaluationofvehicleroaddeparturewarningandassistandcontrolsystemsonatesttrack
● MassachusettsInstituteofTechnologyAgeLab:Aprojectattemptingtodevelopadeep-learning-
based,full-scenerecognitionofvehicleenvironmentfromavisionsensor.Examplesarevehicles,pedestrians,bicyclists,trafficsigns,buildings,curbs,etc.
● UniversityofWisconsin:Aprojectattemptingtoprovideatheoreticalandmathematicalframework
ofhowdriverscommunicatewitheachotherinanintersection. ● UniversityofCaliforniaatSanDiego:Aprojectattemptingtoprovideacomputationalprediction
modelforatransferofcontrolbetweentheautomationandthehumandriver.Themodelhasfactorsoriginatedfromhumanmotorandperceptualbehaviorsaswellasfromscenariosandenvironments
● UniversityofIowa–NationalAdvancedDrivingSimulator:Aprojectattemptingtoprovidea
meaningfulandusefuldatasetofdriverbehaviorswhenencounteringsituationswheretransferofcontrolbetweenautomationandthehumanisrequired.
TOYOTAINVESTMENTSINAUTOMATEDDRIVINGTECHNOLOGYCOMPANIESToyotainvestsinabroadrangeofcompanies,eitherdirectlythroughcapitalinvestment,throughinvestmentfundsestablishedinpartnershipwithfinancialinstitutions,orthroughthecorporateventurecapitalarmoftheToyotaResearchInstitute,calledToyotaAIVentures.Portfoliocompaniesinclude:ToyotaAIVentures● Nautoprovidesatechnologysystem,designedforprofessionaldriversandfleetmanagers,that
monitorsdriversandtheroadenvironmenttopreventcollisions,improvedriverbehavior,andlearnfromthediversedatasharedacrossitssmartcloudnetwork.TheNautodeviceispackedwithAI-poweredsensorsandmountedinsideavehicle'swindshield,whereitprovidespowerfulvisualcontextinsideandoutsidethevehicleandcollectsdatathatcanprovidemeaningfulinsights.
● IntuitionRoboticsisaleaderinthedevelopmentofsocialcompaniontechnology,includingitsElliQ
active-agingroboticcompanion.Thecompany’stechnologyisdesignedtopositivelyimpactthelivesofmillionsofolderadultsbyconnectingthemseamlesslywithfamilyandfriends,makingtechnologyaccessibleandintuitive,andpromotinganactivelifestyle.
20
● SLAMcoredevelopsadvancedalgorithmsdesignedtohelptechnologyplatformslikeautonomouscars,drones,andAR/VRsystemstosimultaneouslybuildamapoftheirsurroundingsandpositionthemselveswithinit.Critically,SLAMcoreapproachesthischallengewithacorefocusonpowerefficiency,acrucialfactorforautonomousmobilityapplicationsgiventheneedtomaximizethepoweravailableforlocomotion.
8. AUTOMATEDSAFETYTECHNOLOGYONTOYOTAVEHICLESSomeofthefollowingfeaturesareonlyavailableinspecificmarkets,ormaybelimitedintheircapabilitiesonamarket-by-marketbasis.I. ToyotaSafetySenseandLexusSafetySystem+Features
● PRE-COLLISIONSYSTEM–VEHICLEDETECTION:AvailableonTSS-C,Pre-CollisionSystem–
VehicleDetectionusesaforward-facingradarandcameradesignedtoscantheroadaheadtohelpyouavoidapotentialfrontalcollisionincertainsituations.Whenapotentialcollisionisdetected,youarealertedwithaudibleandvisualwarningsonthedash,andbrakeassistanceisautomaticallyactivated.Ifyoudonotapplythebrakes,andthesystemdeterminesthecollisionisunavoidable,thebrakesareautomaticallyengagedinsomeconditions.
● PRE-COLLISIONSYSTEM-VEHICLEANDPEDESTRIANDETECTION:AvailableonToyotaSafety
SensePandLexusSafetySystem+,Pre-CollisionSystem-VehicleandPedestrianDetectionusesanin-vehiclecameraandradartohelpdetectavehicleorapedestrianinfrontofyouandcanhelptomitigateoravoidapotentialcollision.Ifthesystemdeterminesthatafrontalcollisionislikely,itpromptsthedrivertotakeactionusingaudioandvisualalerts.Ifthedrivernoticesthepotentialcollisionandappliesthebrakes,thesystemmayapplyadditionalforceusingBrakeAssist.Ifthedriverdoesn’tbrakeintime,thesystemmayautomaticallyapplythebrakestoreducespeed,helpingtominimizethelikelihoodofafrontalcollisionorreduceitsseverity.
● LANEDEPARTUREALERT:LaneDepartureAlerthelpsyoustayinyourlane.Usingaforward-
lookingcamera,thesystemisdesignedtodetectvisiblepaintedlanemarkingsontheroadandalertyouifyouareinadvertentlymovingoutofyourlane.Thesystemwillalertyouwithanaudiblebeepingsound,andanindicatorlightontheinstrumentpanelwillflashsothatyoucanthentakecorrectiveaction.
● LANEDEPARTUREALERTWITHSTEERINGASSISTFUNCTION:TheLaneDepartureAlerthelps
youstayinyourlane.Usingaspecializedcamera,thesystemisdesignedtodetectvisiblepaintedlanemarkingsontheroadandalertyouifyouareinadvertentlymovingoutofyourlane.Thesystemwillalertyouwithanaudiblebeepingsoundandindicatorlightontheinstrumentpanelwillflashsothatyoucanthentakecorrectiveaction.TheLaneDepartureAlertwithSteeringAssistsystembringsaddedfunctionality.Shouldthesystemdeterminethatthedriverisnottakingcorrectivesteeringaction,theSteeringAssistfunctionwillinitiateandprovidegentlecorrectivesteeringwhennecessarytohelpkeepthevehicleinthelane.
● AUTOMATICHIGHBEAMAutomaticHighBeamsisdesignedtohelpdriversseemoreofwhat's
aheadatnighttimewithoutdazzlingotherdrivers.Whenenabled,thisfeatureusesaforward-
21
lookingcameratohelpdetecttheheadlightsofoncomingvehiclesandtaillightsofvehiclesinfrontofyou,thenautomaticallyswitchesbetweenhighandlowbeamstoprovidethemostlightpossibleandenhanceforwardvisibility.Byusinghighbeamsmorefrequently,AHBmayhelpdriver’searlierdetectionofvehiclesandobstacles.
● DYNAMICRADARCRUISECONTROL(DRCC):Whilestayingwithinapresetspeedrange,thesystemmaintainsanappropriatedistancebetweenvehicles,helpingmakelonghighwaydriveslesstiring.Thesystemoperatesatallspeeds,enablingthevehicletofollowthevehicleaheadinlowspeed.This,inturn,helpsreducedriverfatigueevenintrafficcongestion.
II. AdditionalFeaturesonmanyToyotaandLexusVehicles
• REARVIEWMONITOR:TheRear-ViewMonitordisplaysviewoftheareatotherearofthe
vehiclewhendrivinginreverse.Insomemodels,aguidancelineappearsbasedonthepositionofthesteeringwheel.Bylettingthedriverconfirmwheretheyaredriving,thisequipmenthelpsthedriverparksmoothly.
• PANORAMICVIEWMONITOR:High-resolutioncamerasmountedonthefront,sidesandrearof
thevehiclearedesignedtogivedriversa“bird's-eyeview”ofthenearenvironment.MovingViewandSee-ThroughViewoptionscreateacompositeimageofthevehicle'ssurroundingsason-screenguideshelpassistwithparkingandtightmaneuvering.
• PARKINGASSISTSONAR: ParkingAssistSonarutilizesultrasonicsensorsintegratedintothe
bumpersthataredesignedtodetectsurroundingobjects.Usingaudibletonesandanindicatoronthemultimediadisplay,thesystemcannotifyyouofadetectedobject'slocationandproximity,helpingwithroutinetaskslikeparallelparking.
• INTELLIGENTCLEARANCESONAR(ICS):IntelligentClearanceSonarscansforstationaryobjects,likewallsorparkedcars.Shouldthesystemanticipateacollision,itwillemitanaudiblealert,reduceengineormotoroutput,andmayautomaticallyapplythebrakes.
• INTELLIGENTPARKINGASSIST(IPA):IntelligentParkingAssistusesultrasonicsensorstodetectsurroundingobjectsandidentifyparkingspaces.Thedriverstopsthecarbeforetheopenparkingspaceandbypushingasinglebutton,thesystemguidesdriverstotherightpositionforreverseparkingandassistsdriversinbackingintothespace.
• LANEKEEPINGASSIST(LKA): WhentheRaderCruiseControlisactivatedandthesystemsenses
thevehicledeviatingfromitslane,LKAhelpsthecarstayoncoursenearthecenterofthelanebycontinuouslyapplyingasmallamountofcounter-steeringforcetokeepthevehicleinthecenterofthelane.
• BLINDSPOTMONITOR(BSM): BSMisasystemwhichaimstoreduceaccidentsbyalertingthedrivertoothervehiclesinthevehicle’sblindspotdiagonallybehindthedriver’sseatwithandvisualdisplayinthesidemirrorswhilechanginglanes,byusingrearsideradars.

22
• REARCROSSTRAFFICALERT(RCTA): RCTAisdesignedtoprovideaudibleandvisualindicators,alertingthedriverwhenavehicleifavehicleapproacheswhilebackingoutofadrivewayorparkingspace.
• REARCROSSTRAFFICAUTOBRAKE(RCTAB):RCTABisdesignedtodetectavehicleusingarear
camera,andinthecaseofapossiblecollision,helpstominimizesdamagesbyusingalertsandbrakecontrol.
• INTELLIGENTADAPTIVEFRONT-LIGHTINGSYSTEM(AFS): IntelligentAFSisdesignedtoredirect
low-beamheadlampunitsinaccordancewiththesteeringangleandvehiclespeedatnighttoimprovevisibilityduringcornering.
• ADAPTIVEHIGH-BEAMSYSTEM(AHS):AHShelpsprovideoptimizedforwardvisibilityduring
nighttimedrivingandautomaticallyturnsoffthehighbeamheadlampswhenanothervehicleisdetected.Whennoothervehicleispresent,thesystemturnsonthehighbeams.Thesystemalsoautomaticallyoptimizestheheadlamplightdistributionsothatthehighbeamsdonotdirectlyilluminateprecedingoroncomingvehicles.
• APPROACHINGVEHICLEAUDIBLESYSTEM(AVAS): EV-operated(ElectricVehicle)hybridcars
runveryquietly.Whenthevehicleisdrivenat25km/horreversing,thesystememitsanalertsoundtohelpnotifypedestrians.
• ITSCONNECT:ITSConnectusesthededicatedITSfrequencyforroad-to-vehicleandvehicle-to
vehiclecommunicationtoobtaininformationthatcannotbeeasilycapturedwithonboardsensors.Atintersectionswithpoorvisibility,informationaboutoncomingvehiclesandpedestriansdetectedbysensorsabovetheroadwillbeconveyedviaroad-to-vehiclecommunication,andinformationaboutapproachingvehicleswillbeconveyedviavehicle-to-vehiclecommunication,withaudioandvisualalertswarningdriverswhennecessary.Inaddition,ITSConnectincludesCommunicatingRadarCruiseControlfeature,enablingthevehicletofollowtheprecedingvehiclemoresmoothly,obtainingitsaccelerationanddecelerationinformationviavehicle-to-vehiclecommunication.
• AUTOMATICCRASHNOTIFICATION(ACN):ACNhelpsdriversreceivearesponsefromemergencyteams.Intheeventofeitheranairbagdeploymentorasevererear-endcollisioninanareawithcoverage,theresponsecenterwillbeautomaticallynotifiedviaembeddedcellulartechnologyandGPS.OncetheresponsecenteragentreceivesthevehicleIDandthevehicle’slocation,theagentcanspeakwiththedrivertoascertainthelevelofemergency.Ifthedriverisunabletocommunicate,theagentautomaticallytreatsthecallasanemergency.Theresponsecenteragentthenusesthevehicle’sGPSlocationtodeterminethenearestPublicSafetyAnsweringPoint(PSAP)availabletoprovideemergencysupportandwilloffertostayonthelineuntilemergencyassistancearrives.