auma catalogo
DESCRIPTION
catalogo aumaTRANSCRIPT

AUMA MATICAM 01.1/ AM 02.1AMEx 01.1/ AMEx 02.1AMExC 01.1/ AMExC 02.1PROFIBUS-DPVersión Z025.683/01
Instrucciones de servicio

2
Actuadores eléctricos multi-vueltas y 1/4 de vueltaen versión AUMA MATIC con interface PROFIBUS-DP Instrucciones de servicio
Alcance de estas instrucciones: Estas instrucciones son aplicables a actuadores multi-vueltas SA(R)07.1 -SA(R)16.1, SA(R)MEx 07.1 - SA(R)MEx 16.1 y SARExC 07.1 - SA(R)ExC16.1, así como actuadores de 1/4 de vuelta SG 05.1 - SG 12.1, SGEx 05.1- SGEx 12.1 y SGExC 05.1 - SGExC 12.1 con control integradoAUMA MATIC tipo AM, AMEx, AMExC con interface PROFIBUS-DP.Versión del software: Z025.683/01
TABLA DE CONTENIDOS Página
1. Instrucciones de seguridad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.1 Rango de aplicación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.2 Descripción breve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.3 Puesta en marcha (conexión eléctrica) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.4 Mantenimiento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.5 Avisos y advertencias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2. Transporte y almacenamiento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
3. Información general sobre PROFIBUS-DP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53.1 Características básicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53.2 Funciones básicas de PROFIBUS-DP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63.3 Modo de transferencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63.4 Acceso al bus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63.5 Comunicación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63.6 Funcionalidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63.7 Funciones de protección . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63.8 Tipos de estación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
4. Datos técnicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
5. Diseño de AUMA MATIC PROFIBUS-DP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
6. Puesta en marcha eléctrica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96.1 Ajuste de finales de carrera y limitadores de par . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96.2 Conexión eléctrica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96.2.1 Conexión a la red . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96.2.2 Conexión del bus; versión estándar con conector múltiple AUMA . . . . . . . . . . . . . . . . . . . . 96.2.3 Conexión del bus; versión Ex con conector múltiple / placa de terminales . . . . . . . . . . . . . . . 106.2.4 Conexión del bus; versión Ex con conexión enchufable por klemas . . . . . . . . . . . . . . . . . . 116.2.5 Conexión de bus redundante . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126.2.6 Cables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126.3 Establecimiento de la dirección del bus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
7. Puesta en marcha con control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157.1 Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157.2 Programación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157.3 Configuración . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157.4 Inicio de la comunicación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 167.5 Descripción de los parámetros de usuario AUMA. . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
8. Entrada de representación de proceso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 238.1 Entrada de representación de proceso (representación de proceso por defecto). . . . . . . . . . . . 238.2 Entrada de representación de proceso (representación de proceso por defecto). . . . . . . . . . . . 24
9. Salida de representación de proceso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3
Actuadores eléctricos multi-vueltas y 1/4 de vueltaInstrucciones de servicio en versión AUMA MATIC con interface PROFIBUS-DP
10. Descripción de las funciones del actuador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2910.1 Órdenes para servicio ABRIR / CERRAR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2910.2 Posicionador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3010.3 Modo por pasos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
11. Función de seguridad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
12. Descripción de la tarjeta PROFIBUS-DP. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3212.1 Descripción de los switches . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3312.2 Cableado de entradas y salidas en la tarjeta PROFIBUS-DP . . . . . . . . . . . . . . . . . . . . . . 3412.3 Comprobación / ajuste de los switches . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
13. Solución de problemas y acciones correctoras . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3713.1 Señales ópticas durante la operación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3713.2 El actuador no puede ser controlado por PROFIBUS-DP . . . . . . . . . . . . . . . . . . . . . . . . 3913.3 La señal de posición no funciona . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4213.4 El actuador no es desconectado por el final de carrera en posición CERRADO . . . . . . . . . . . . 4213.5 El actuador se detiene inmediatamente después del arranque . . . . . . . . . . . . . . . . . . . . . 4213.6 Medición de las señales PROFIBUS con un osciloscopio. . . . . . . . . . . . . . . . . . . . . . . . 42
14. Apéndice A Fichero GSD . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
15. Apéndice B Propuesta de cableado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
16. Apéndice C Diagrama de cableado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5416.1 Leyenda del diagrama de cableado AUMA MATIC PROFIBUS-DP . . . . . . . . . . . . . . . . . . . 5516.2 Información adicional a la leyenda . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
17. Apéndice D Literatura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
18. Apéndice E Certificado PNO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
Índice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
Direcciones de sucursales y representantes de AUMA . . . . . . . . . . . . . . . . . . . . . . . . 59

1. Instrucciones de seguridad
1.1 Rango de aplicación Los actuadores AUMA están diseñados para la maniobra de válvulasindustriales (p.ej. válvulas de globo, compuerta, mariposa, bola, etc.). AUMAno se hará responsable de los posibles daños provocados por el uso de losactuadores en aplicaciones distintas a las descritas. Ese riesgo seráasumido completamente por el usuario. La observancia de estasinstrucciones se considera como parte del uso designado del actuador.
1.2 Descripción breve Los actuadores AUMA tienen un diseño modular. El motor y los engranajesestán alojados en una carcasa común. Los actuadores son accionados porun motor eléctrico y controlados por el control electrónico AUMA MATICPROFIBUS-DP. El control electrónico está incluido en el alcance desuministro.
1.3 Puesta en marcha(conexión eléctrica)
Los trabajos en el sistema o equipamiento eléctrico sólo deben serrealizados por técnicos calificados o por personal especialmente instruidobajo el control y supervisión de estos técnicos, de acuerdo con las normasde seguridad aplicables.
1.4 Mantenimiento Las instrucciones de mantenimiento deben ser observadas para podergarantizar un funcionamiento seguro del actuador.
1.5 Avisos y advertencias La no observancia de los avisos y advertencias puede ocasionar seriaslesiones personales o daños materiales. El personal calificado debe estarbien familiarizado con todos los avisos y advertencias descritos en estasinstrucciones. Un correcto transporte, almacenamiento, instalación y puestaen marcha son esenciales para garantizar un servicio seguro y libre deaverías. Las siguientes referencias llaman la atención sobre losprocedimientos de seguridad invocados en estas instrucciones. Cada unaestá identificada con un pictograma.
Este pictograma significa: ¡Aviso!"Aviso" señala actividades o procedimientos que tienen una influenciarelevante en el funcionamiento seguro. Su no observancia puede ocasionardaños.
Este pictograma significa: ¡Peligro electrostático (ESD)!Si este pictograma está pegado en una tarjeta electrónica, ésta contienepiezas que pueden resultar dañadas o destruidas por descargaselectrostáticas. Si las tarjetas deben ser manipuladas durante los ajustes omedidas, o deben ser reemplazadas, se debe asegurar que inmediatamenteantes se ha producido una descarga por contacto con una superficiemetálica conectada a tierra (p.ej. la carcasa).
Este pictograma significa: ¡Advertencia!"Advertencia" señala actividades o procedimientos que, si no se realizancorrectamente, pueden afectar la seguridad de personas o materiales.
4
Actuadores eléctricos multi-vueltas y 1/4 de vueltaen versión AUMA MATIC con interface PROFIBUS-DP Instrucciones de servicio
2. Transporte y almacenamiento.Transportar al lugar de instalación en embalaje resistente..No atar cuerdas al volante para elevar el actuador..Almacenar en salas bien ventiladas y secas..Proteger contra la humedad del suelo almacenando en estanterías opalets de madera..Cubrir para proteger contra polvo y suciedad..Aplicar agente anti-corrosión a las superficies mecanizadas.
3. Información general sobre PROFIBUS-DPActualmente, los buses de campo en serie son los sistemas más utilizadospara la comunicación entre sistemas de automatización y entre éstos y losdispositivos de campo. Miles de aplicaciones han demostrado claramenteque el uso de la tecnología de bus de campo supone un ahorro, de hasta el40%, en cableado, puesta en marcha y mantenimiento. Con dos hilos sepueden transmitir todas las señales de entrada y salida, parámetros y datosde diagnosis de la estación del bus. Mientras que en el pasado los sistemasde bus de campo utilizados eran habitualmente específicos de unfabricante, y por lo tanto incompatibles con otros sistemas, actualmente seutilizan, casi exclusivamente, sistemas abiertos y estandarizados. Estosignifica que el usuario es independiente de suministradores individuales ypuede elegir el mejor producto al precio más competitivo.PROFIBUS-DP es el sistema abierto de bus de campo líder en Europa, yes también utilizado con éxito en todo el mundo. El rango de aplicaciónincluye automatización en las áreas de fabricación, procesamiento yconstrucción. PROFIBUS-DP es un estándar internacional y abierto, bajo lanorma EN 50 170. Esta estandarización asegura que las inversiones defabricantes y usuarios están protegidas en el grado máximo y laindependencia del fabricante queda garantizada. Estas instrucciones deservicio no pueden incluir una descripción detallada de PROFIBUS-DP.Para más información, consultar la literatura descrita en el apéndice D.
3.1 Características básicas PROFIBUS-DP determina las características técnicas y funcionales de unsistema de bus de campo en serie mediante el cual se puedeninterconectar dispositivos de automatización. PROFIBUS-DP distingue en-tre dispositivos maestros y esclavos.PROFIBUS-DP está diseñado para una transmisión rápida a nivel de cam-po. Los dispositivos de control central, PLC ó PC, comunican a través deuna conexión en serie rápida con las estaciones en campo, p.ej.dispositivos input/output, válvulas y actuadores.El intercambio de datos entre los dispositivos de campo tiene lugarcíclicamente. Las funciones de comunicación son establecidas porPROFIBUS-DP de acuerdo con la norma EN 50 170.
Dispositivos maestros controlan el tráfico de datos en el bus. Un maestropuede enviar mensajes sin un requerimiento externo. Los maestros sontambién denominados 'estaciones activas' en el protocolo PROFIBUS.
Dispositivos esclavos, p.ej. actuadores AUMA PROFIBUS-DP, sondispositivos periféricos. Esclavos típicos son dispositivos input/output,válvulas, actuadores y sensores. No tienen acceso al bus, es decir,solamente pueden reconocer mensajes recibidos o, a requerimiento de unmaestro, transmitirle mensajes. Los esclavos son también denominados'estaciones pasivas'.
5
Actuadores eléctricos multi-vueltas y 1/4 de vueltaInstrucciones de servicio en versión AUMA MATIC con interface PROFIBUS-DP

3.2 Funciones básicas de PROFIBUS-DPEl maestro lee cíclicamente la información de entrada proveniente de losesclavos, y escribe cíclicamente la información de salida en los esclavos.Adicionalmente a esta transferencia cíclica de datos de la representaciónde proceso, PROFIBUS-DP proporciona también potentes herramientasútiles para diagnosis y puesta en marcha. El tráfico de datos es controladopor las funciones de vigilancia propias del maestro y los esclavos.
3.3 Modo de transferencia . RS-485 cable de par trenzado o cable de fibra óptica.. Los actuadores AUMA soportan tasas de hasta 1,5 MBits/s.
3.4 Acceso al bus . Paso de testigo entre los maestros y polling entre maestro y esclavo.. Son posibles sistemas mono-maestro o multi-maestro.. Maestros y esclavos: max. 126 estaciones conectadas en un bus.
3.5 Comunicación . Par-a-par (transferencia de datos en red) o 'multicast' (órdenes a todoslos esclavos).. Transferencia de datos maestro-esclavo cíclica o acíclica.
3.6 Funcionalidad . Transferencia cíclica de datos entre esclavo DP y esclavos DP.. Activación o desactivación dinámica de esclavos DP individuales.. Comprobación de la configuración de los esclavos DP.. Sincronización de entradas y/o salidas.
3.7 Funciones de protección . Todos los mensajes son transmitidos con distancia Hamming HD=4.. Temporizador 'watch-dog' en esclavos DP.. Protección de acceso a las entradas/salidas de los esclavosDP.. Vigilancia de transferencia de datos con intervalo de tiempoconfigurable en el maestro.. Función 'fail safe'.
3.8 Tipos de estación . DP maestro clase 2 (DPM2), p.ej. dispositivos de programación /configuración.. DP maestro clase 1 (DPM1), p.ej. controladores centrales PLC, PC, .... DP esclavo, p.ej. actuadores AUMA PROFIBUS-DP. Dispositivos conentradas / salidas analógicas / digitales, actuadores, válvulas, etc.
6
Actuadores eléctricos multi-vueltas y 1/4 de vueltaen versión AUMA MATIC con interface PROFIBUS-DP Instrucciones de servicio

4. Datos técnicos
7
Actuadores eléctricos multi-vueltas y 1/4 de vueltaInstrucciones de servicio en versión AUMA MATIC con interface PROFIBUS-DP
Datos generales PROFIBUS-DP:Protocolo de comunicación PROFIBUS-DP según EN 50 170, DIN 19 245Topología de red Estructura lineal (BUS). Con repetidores, también estructura en árbol. Posible conexión y
desconexión de estaciones durante la operación sin afectar a otras estaciones.Medio de transmisión Hilo de cobre trenzado y apantallado, según EN 50 170Interface EIA-485 (RS485)Tasa de transmisión/longitud de cable
Tasa(kbit/s)
9.619.245.4593.75
187.5500
1.500
Longitud de cable(sin repetidor)
1,200 m1,200 m1,200 m1,200 m1,000 m
400 m200 m
Longitud de cable(con repetidor)aprox. 10 kmaprox. 10 kmaprox. 10 kmaprox. 10 kmaprox. 10 kmaprox. 4 kmaprox. 2 km
Tipos de estación DP maestro clase 1, p.ej. controladores centrales, PLC, PC, ...DP maestro clase 2, p.ej. herramientas de programación / configuraciónDP esclavo, p.ej. disp. con entradas/salidas analógicas y/o digitales (p.ej. actuadores)
Número de estaciones 32 estaciones sin repetidores, con repetidores ampliable hasta 126.Acceso al bus Paso de testigo entre los maestros y polling para esclavos.
Posibles sistemas mono-maestro o multi-maestro.
Datos del control de actuador AUMA MATICcon interface PROFIBUS-DP:Control electrónico Control integrado AUMA MATIC, tipo AM 01.1/02. para montaje directo en:
− Actuadores multi-vueltas SA(R) 07.1-16.1, SA(R)MEx 07.1-16.1, SA(R)ExC 07.1-16.1− Actuadores 1/4 de vuelta SG 05.1 - 12.1, SGEx 05.1 - SGEx 12.1, SGExC 05.1 - 12.1
Tipos de operación soportados Intercambio de datos cíclico, modo 'sync', modo 'freeze', modo 'fail safe'Reconocimiento de tasa automáticoSalida representación de proceso(órdenes)
− ABRIR− PARAR− CERRAR− valor nominal 1) (opción)
Entrada representación deproceso (señales)
− posición final ABIERTO, CERRADO− posición de válvula 1) (opción)− selector en posición LOCAL/ REMOTO− indicación de marcha 1) (direccional)− limitador de par ABRIR, CERRAR actuado− final de carrera, ABIERTO, CERRADO actuado− operación manual con volante 1) o mando local 1)
− valor de las entradas analógicas (2) y digitales (4) del cliente (opción)− canal de comunicación A ó B (canal redundante) activo
Entrada representación deproceso (mensajes de fallo)
− protección del motor actuada− limitador de par actuado antes de una posición final− inversión de fase o fallo de fase 2)
− tensión de alimentación de la tarjeta PROFIBUS-DP fuera del rango permitido− pérdida de una señal de entrada analógica
Entradas analógicas / digitales(opción)
− 2 entradas analógicas libres (0 − 20 mA)− 4 entradas digitales libresAlimentación por fuente de alimentación del AUMA MATIC (max. 60 mA)
Posicionador 1) (opción) Error max. y tiempo muerto max. programables a través del BUS.Temporizador 1) (opción) Inicio y fin del modo por pasos y tiempo ON/OFF, programables a través del BUS.Comportamiento con fallo decomunicación o estado CLEARdel maestro
El comportamiento del actuador esprogramable: − parada en la posición actual
− posición final ABIERTO o CERRADO− una posición intermedia cualquiera 1)
Redundancia de cable (opción) Opcionalmente, se puede conectar un segundo cable de transmisión1) requiere transmisor de posición (potenciómetro o RWG) en el actuador 2) sólo disponible para las gamas SA, SAR y SG

5. Diseño de AUMA MATIC PROFIBUS-DPCon AUMA MATIC PROFIBUS-DP, AUMA suministra el control óptimo paraactuadores multi-vueltas tipo SA y actuadores 1/4 de vuelta tipo SG.
El control integrado AUMA MATIC PROFIBUS-DP está constituido por lossiguientes módulos:.Tarjeta PROFIBUS-DP, proporciona el vínculo entre el PROFIBUS y la
electrónica interna..La pletina lógica vincula las señales del actuador con el mando local y latarjeta PROFIBUS y controla el contactor-inversor o el módulo detiristores..Mando local con selector y pulsadores. Con el selector se elige el modode control deseado LOCAL - 0 - REMOTO. Los pulsadores (ABRIR)- Stop - (CERRAR) son usados para operación eléctrica en local..Conectores múltiples para el montaje de AUMA MATIC PROFIBUS-DP enlos actuadores..Pletina de control y señalización con fusibles primarios, relés para laconversión de las órdenes del mando local en señales eléctricas ylámparas indicadoras (opción)..Contactor-inversor o módulo de tiristores para el control del motor..Pletina de conexión PROFIBUS con terminales para el sistema de doshilos y resistencias de terminación para el bus.
Es posible equipar actuadores ya instalados con PROFIBUS-DP,sustituyendo el control AUMA MATIC por el control AUMA MATICPROFIBUS-DP.
8
Actuadores eléctricos multi-vueltas y 1/4 de vueltaen versión AUMA MATIC con interface PROFIBUS-DP Instrucciones de servicio
Pletina lógica
Conexión eléctricacon conector múltipleAUMA
Fuente dealimentación
Contactor-inversor
Pletina de control yseñalización
Tarjeta PROFIBUS-DP
Mando local
Conector múltipleal actuador
Pletina deconexiónPROFIBUS
Filtro contrafallos EMC
Figura A: AUMA MATIC PROFIBUS-DP
6. Puesta en marcha eléctrica6.1 Ajuste de finales de carrera y limitadores de par
Comprobar los ajustes de finales de carrera y limitadores de par, así comodel transmisor electrónico de posición o potenciómetro (opción).Reajustar si es necesario.Realizar ajustes de acuerdo con las instrucciones de servicio del actuador:. “Actuadores multi-vueltas SA(R) 07.1-SA(R) 16.1 AUMA MATIC”. “Actuadores multi-vueltas SA(R)MEx 07.1-SA(R)MEx 16.1 AUMA MATIC
Ex”. “Actuadores multi-vueltas SA(R)ExC 07.1-SA(R) 16.1 AUMA MATIC ExC”. “Actuadores 1/4 de vuelta SG 05.1-SG 12.1 AUMA MATIC”
Si se modifica el ajuste de los finales de carrera y el actuador estáequipado con transmisor de posición (RWG o potenciómetro), se debeefectuar una maniobra de referencia:.Operar el actuador eléctricamente con los pulsadores locales ABRIR
y CERRAR hasta las posiciones finales ABIERTO yCERRADO, y viceversa).
Si no se efectúa esta maniobra de referencia después de la modificación delos finales de carrera, la señal de posición transmitida por el bus no serácorrecta. El bus señaliza este fallo como un aviso (ver página 26).
6.2 Conexión eléctrica
6.2.1 Conexión a la red Los trabajos en el sistema o equipamiento eléctrico sólodeben ser realizados por técnicos calificados o por personalespecialmente instruido bajo el control y supervisión deestos técnicos, de acuerdo con las normas de seguridadaplicables.
Realizar conexión a la red de acuerdo con las instrucciones de servicio delactuador (ver epígrafe 6.1).
Para el cableado, deben observarse las normas deinstalación de PROFIBUS-DP.Ver literatura en apéndice D.
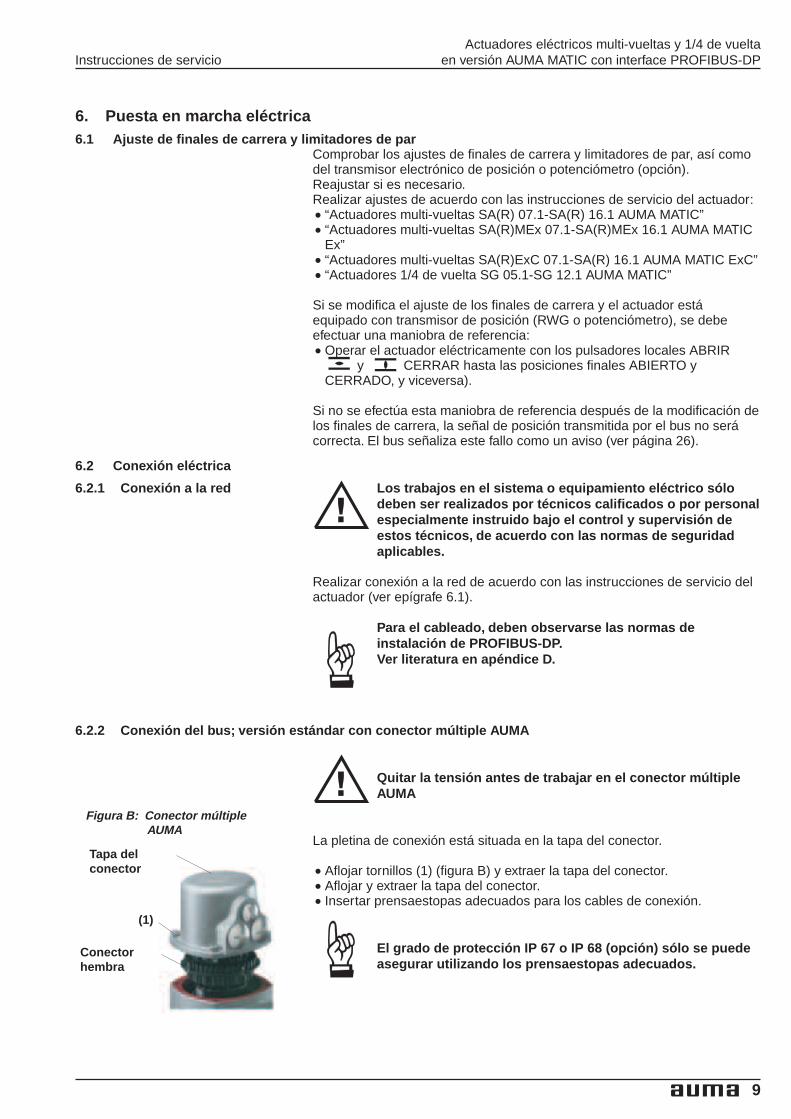
6.2.2 Conexión del bus; versión estándar con conector múltiple AUMA
Quitar la tensión antes de trabajar en el conector múltipleAUMA
La pletina de conexión está situada en la tapa del conector.
.Aflojar tornillos (1) (figura B) y extraer la tapa del conector..Aflojar y extraer la tapa del conector.. Insertar prensaestopas adecuados para los cables de conexión.
El grado de protección IP 67 o IP 68 (opción) sólo se puedeasegurar utilizando los prensaestopas adecuados.
9
Actuadores eléctricos multi-vueltas y 1/4 de vueltaInstrucciones de servicio en versión AUMA MATIC con interface PROFIBUS-DP
Tapa delconector
(1)
Conectorhembra
Figura B: Conector múltipleAUMA

.Conectar cable del bus al canal 1 de acuerdo con el diagrama deconexión (figura C).
Las resistencias de terminación para canal 1 y canal 2 son conmutadas através de los switches (S1) y (S2) (figura D).Ambos switches se suministran en posición ‘OFF’. Conectar las resistenciasde terminación (posición ‘ON’) únicamente si el actuador es la últimaestación PROFIBUS.
6.2.3 Conexión del bus; versión Ex con conector múltiple / placa de terminales
Al trabajar en áreas potencialmente explosivas, observar lasNormas Europeas EN 60079-14 “Instalaciones Eléctricas enÁreas Peligrosas" y EN 60079-17 “Inspección yMantenimiento de Instalaciones Eléctricas en ÁreasPeligrosas”.
Para el conector múltiple, la conexión del bus se efectúa separando la tapadel conector de terminales EEx e (figura E1) de la placa de terminales. Elcontrol AUMA MATIC ExC (tipo de protección EEx d) permanece cerrado.
. Aflojar tornillos (1) (figura E1) y extraer la tapa del conector.
.Insertar prensaestopas con certificado “EEx e”,adecuados para el tamaño de los cables..El grado de protección IP 67 o IP 68 (opción) sólo sepuede asegurar utilizando los prensaestopas adecuados..Sellar entradas de cable no usadas con tapones.
Secciones:Cables de mando: max. 1.5 mm2,Cables de fuerza: max. 6 mm2,
Cables de bus adecuados, ver página 12.
10
Actuadores eléctricos multi-vueltas y 1/4 de vueltaen versión AUMA MATIC con interface PROFIBUS-DP Instrucciones de servicio
S1 S2
Canal 2(redundante)
Canal 1
Apantallamiento
ONOFF OFF ON
Figura D: Pletina de conexión
P/B N/A N/A5VB
A B
P/B GNDAEstación
PROFIBUSanterior
EstaciónPROFIBUSsiguiente
Figura C: Diagrama de conexión
Asignación del cable PROFIBUS
CablePROFIBUS
Etiquetado de AUMAen la conexión
Conector SUB-D 9 pinmacho (para otros
equipos PROFIBUS)Color
A N/A 8 verde
B P/B 3 rojo
Tapa delconector
(1)Terminales- EEx e
Placa determinales
Figura E1: Conector múltipleAUMA

.Quitar apantallamiento en longitud 120 - 140 mm. Pelar cables: mandomax. 8 mm, fuerza max. 12 mm.Para cables flexibles, usar hilo trenzado con terminal, según DIN 46228..Conectar cable del bus al canal 1 según configuración de terminales(figura E2).La resistencia de terminación para el canal 1 se conecta mediante lospuentes 31-33 y 32-34..Conectar las resistencias de terminación únicamente si el actuador es laúltima estación PROFIBUS.
6.2.4 Conexión del bus; versión Ex con conexión enchufable por klemas
Al trabajar en áreas potencialmente explosivas, observarlas Normas Europeas EN 60079-14 “InstalacionesEléctricas en Áreas Peligrosas" y EN 60079-17“Inspección y Mantenimiento de Instalaciones Eléctricasen Áreas Peligrosas”.
La conexión del bus se efectúa mediante klemas (figura E3). Elcompartimento de klemas está diseñado con protección "EEx e" (seguridadaumentada). El control AUMA MATIC ExC (tipo de protección EEx d)permanece cerrado.
.Aflojar tornillos (1) (figura E3) y extraer la tapa de klemas.
.Insertar prensaestopas con certificado “EEx e”,adecuados para el tamaño de los cables..El grado de protección IP 67 o IP 68 (opción) sólo sepuede asegurar utilizando los prensaestopas adecuados..Sellar entradas de cable no usadas con tapones.
Secciones:Cables de mando: max. 2.5 mm2,Cables de fuerza: max. 10 mm2,
Cables de bus adecuados, ver página 12.
.Conectar cable del bus al canal 1 según configuración de klemas(figura E4). La resistencia de terminación para el canal 1 se conectamediante los puentes 1-2 y 5-6.
11
Actuadores eléctricos multi-vueltas y 1/4 de vueltaInstrucciones de servicio en versión AUMA MATIC con interface PROFIBUS-DP
Tapa deklemas
(1)
Klema
Placa determinales
Figura E3: Conexiónenchufable por klemas
31
31 34
32
32 33
A
Estación anteriorPROFIBUS-DP
Otra estación sigue al actuador:
A
B
B
A
BEstación siguiente
PROFIBUS-DP
El actuador es la última estación:
Figura E2: Terminales EEx e en la placa de terminales

.Conectar las resistencias de terminación únicamente si el actuador es laúltima estación PROFIBUS.
6.2.5 Conexión de bus redundante Los actuadores AUMA MATIC PROFIBUS-DP pueden ser conectados conun segundo cable (redundante). Si el canal 1 falla, p.ej. debido a una roturadel cable, el esclavo se conecta automáticamente al canal 2.
.Para versiones con conector múltiple AUMA (epígrafe 6.2.2):Conectar el cable redundante al canal 2 (figura D) según el diagrama deconexión (igual que para canal 1, figura C)..Para versión Ex con conector múltiple / placa de terminales(epígrafe 6.2.3):Conectar cable B a terminal 35, cable A a terminal 36 (figura E2).La resistencia de terminación para el canal 2 se conecta mediante lospuentes 35-37 y 36-38..Para versión Ex con conexión enchufable por klemas(epígrafe 6.2.4):Conectar cable B a klemas 8 y 9, cable A a klemas 10 y 11(figura E4).La resistencia de terminación para el canal 2 se conecta mediante lospuentes 7-8 y 11-12.
El ajuste de la conexión de bus redundante se efectúa mediante losparámetros 4 y 5 (ver página 17).
6.2.6 Cables Para la conexión de PROFIBUS-DP, utilizar solamente cables según normaDIN 19245 o EN 50170-2, cable tipo A.
12
Actuadores eléctricos multi-vueltas y 1/4 de vueltaen versión AUMA MATIC con interface PROFIBUS-DP Instrucciones de servicio
1 2 3 4 5 6 7 8 9 10 1112
B
A
A
B
Estación anteriorPROFIBUS-DP
Estación siguientePROFIBUS-DP
1 2 3 4 5 6 7 8 9 10 1112
B
A
Estación anteriorPROFIBUS-DP
El actuador esla última estación:
Otra estaciónsigue al actuador:
Figura E4: Configuración de klemas
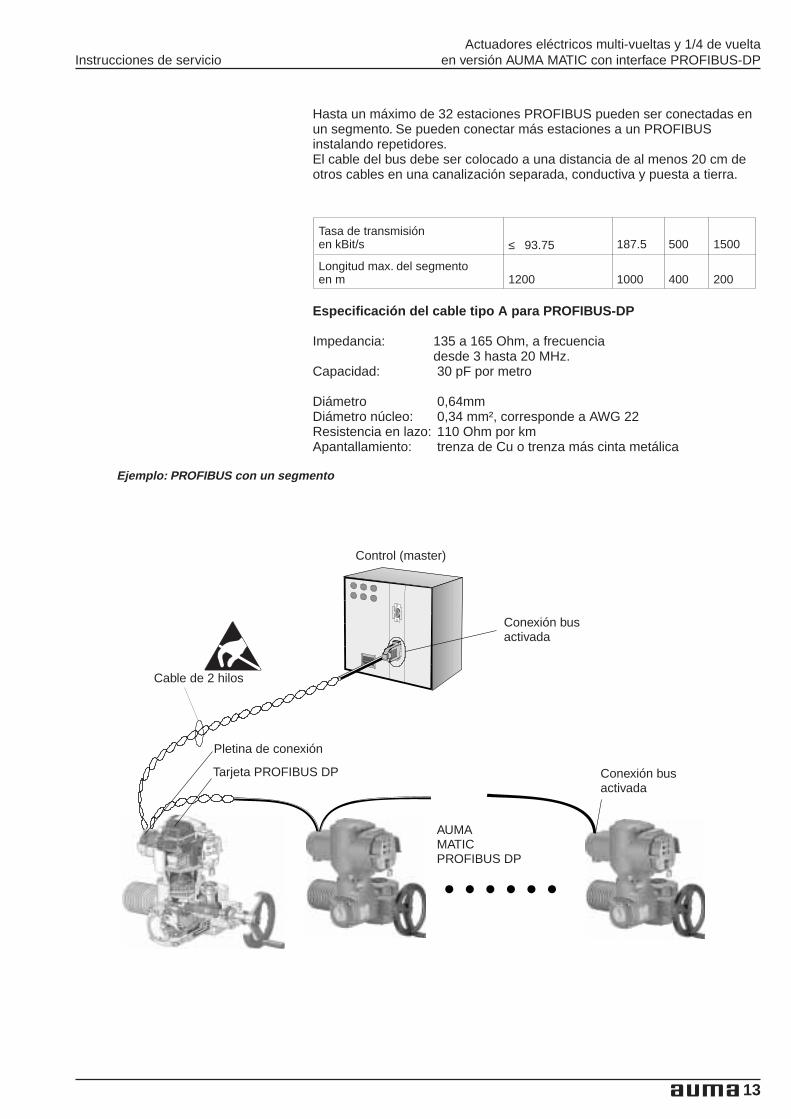
Hasta un máximo de 32 estaciones PROFIBUS pueden ser conectadas enun segmento. Se pueden conectar más estaciones a un PROFIBUSinstalando repetidores.El cable del bus debe ser colocado a una distancia de al menos 20 cm deotros cables en una canalización separada, conductiva y puesta a tierra.
Especificación del cable tipo A para PROFIBUS-DP
Impedancia: 135 a 165 Ohm, a frecuenciadesde 3 hasta 20 MHz.
Capacidad: 30 pF por metro
Diámetro 0,64mmDiámetro núcleo: 0,34 mm², corresponde a AWG 22Resistencia en lazo: 110 Ohm por kmApantallamiento: trenza de Cu o trenza más cinta metálica
13
Actuadores eléctricos multi-vueltas y 1/4 de vueltaInstrucciones de servicio en versión AUMA MATIC con interface PROFIBUS-DP
Tasa de transmisiónen kBit/s ≤ 93.75 187.5 500 1500
Longitud max. del segmentoen m 1200 1000 400 200
Pletina de conexión
Tarjeta PROFIBUS DP
Cable de 2 hilos
Conexión busactivada
Control (master)
Conexión busactivada
AUMAMATICPROFIBUS DP
Ejemplo: PROFIBUS con un segmento
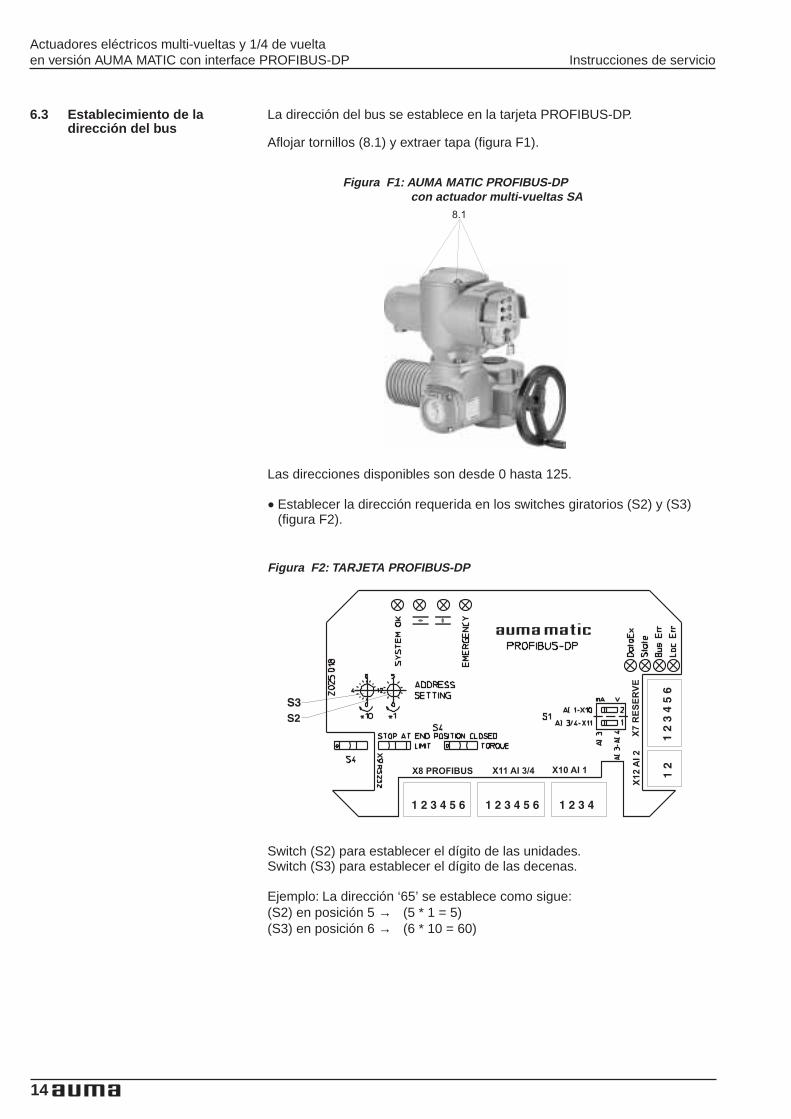
6.3 Establecimiento de ladirección del bus
La dirección del bus se establece en la tarjeta PROFIBUS-DP.
Aflojar tornillos (8.1) y extraer tapa (figura F1).
Las direcciones disponibles son desde 0 hasta 125.
.Establecer la dirección requerida en los switches giratorios (S2) y (S3)(figura F2).
Switch (S2) para establecer el dígito de las unidades.Switch (S3) para establecer el dígito de las decenas.
Ejemplo: La dirección ‘65’ se establece como sigue:(S2) en posición 5 → (5 * 1 = 5)(S3) en posición 6 → (6 * 10 = 60)
14
Actuadores eléctricos multi-vueltas y 1/4 de vueltaen versión AUMA MATIC con interface PROFIBUS-DP Instrucciones de servicio
8.1
Figura F1: AUMA MATIC PROFIBUS-DPcon actuador multi-vueltas SA
Figura F2: TARJETA PROFIBUS-DP

7. Puesta en marcha con control7.1 Introducción Al poner en marcha una red PROFIBUS-DP, las estaciones deben ser
parametrizadas y configuradas con el software de programación(configurador PROFIBUS).El software primero lee el fichero GSD (GeräteStammDaten = base dedatos del dispositivo) de los actuadores individuales. El fichero GSDcontiene información necesaria para el maestro sobre las propiedades deldispositivo. El fichero GSD AUMA2.GSD es suministrado junto con losactuadores PROFIBUS-DP. Luego, el usuario puede configurar yparametrizar cada estación de la red PROFIBUS-DP.Esta información es almacenada en el control (maestro DP) y enviada a losactuadores (esclavos DP) cada vez que se inicia la comunicación.El control es ejecutado a través de la entrada de representación de procesoy los bytes de salida. Si se elige una configuración con datos consistentes,se deben utilizar con determinados PLCs elementos funcionales especialespara el control de los esclavos PROFIBUS-DP.
7.2 Programación La parametrización está parcialmente determinada por el estándarPROFIBUS, p.ej. un bit para activar o desactivar la vigilancia del bus('watchdog').El control AUMA PROFIBUS-DP puede recibir adicionalmente hasta 100bytes de 'parámetros de usuario', en los cuales se pueden establecerparámetros específicos de AUMA. Estos parámetros específicos se dividenen 50 parámetros con 2 bytes cada uno. El primer byte es prioritario. Losparámetros pueden ser modificados por el software de programación delcontrol. El software de programación más reciente soporta elestablecimiento de los parámetros mediante texto y menú. Si se utiliza soft-ware más antiguo, los valores de los parámetros deben ser introducidosusando números hexadecimales.El significado de cada parámetro específico de AUMA es descrito en elepígrafe 7.5.
7.3 Configuración Mediante la configuración, se determina cuántos bytes de entrada y salidapor cada dispositivo son reservados en la memoria del control.Adicionalmente, se determina si los datos son procesadosconsistentemente o no consistentemente.
Solamente se transmiten entre maestro DP y esclavo DP elnúmero establecido de bytes en la configuración.
Son posibles las siguientes configuraciones para los actuadores AUMAPROFIBUS-DP:
El número de bytes de entrada determina cuántos bytes envía el esclavoDP al maestro DP (máximo 16).El número de bytes de salida determina cuántos bytes envía el maestro DPal esclavo DP (máximo 8).
15
Actuadores eléctricos multi-vueltas y 1/4 de vueltaInstrucciones de servicio en versión AUMA MATIC con interface PROFIBUS-DP
Número de bytes de entrada Número de bytes de salida1 12 12 24 46 16 26 48 412 416 8
Todas estas configuraciones (excepto para 1 In, 1 Out), pueden ser elegidas comoconsistentes o no consistentes

Si, por ejemplo, se selecciona la configuración con 8 bytes de entrada, elesclavo DP sólo envía los primeros 8 bytes al maestro DP. En ese caso, elmaestro no tiene acceso a los bytes 9 a 12. De ese modo el maestro ahorraespacio en memoria, ya que sólo tiene que reservar 8 bytes de entradapara el actuador. Los datos de los actuadores AUMA deben ser procesadosconsistentemente por el maestro DP. De esta forma se asegura que el valorde una variable de 2 bytes (transmisor electrónico de posición, entradaanalógica del cliente) no cambia tras la lectura del primer byte y no sedistorsiona el valor.Si un maestro no permite usar configuraciones consistentes, se puedeelegir una configuración no consistente. Los valores del transmisorelectrónico de posición y de las entradas analógicas del cliente sontransmitidos en formato de 1 byte (0-100%, parámetro 2 = 0, parámetro22 = 0, parámetro 25 = 0).
7.4 Inicio de la comunicación Cuando el maestro DP es conectado, primero envía un telegrama deparámetro y configuración a cada esclavo DP. Si los parámetros yconfiguración son correctos, el actuador asume el estado 'Data exchange'.Se establece el intercambio de datos entre el control y el actuador. El mae-stro DP puede controlar el esclavo DP y leer su estado actual a través de larepresentación de proceso.Si se interrumpe la comunicación (p.ej. desconexión del esclavo o rotura delcable PROFIBUS), el maestro DP la reanuda automáticamente una vez lacausa del fallo es eliminada.
7.5 Descripción de los parámetros de usuario AUMA
Parámetro 1 “Transmisor de posición”Valor por defecto (ajuste estándar): 10: El actuador no tiene transmisor de posición.1: El actuador está equipado con potenciómetro sin RWG.2: El actuador está equipado con RWG 0-20 mA.
Para este transmisor de posición, la vigilancia de lainterrupción de señal no está activa.
3: El actuador está equipado con RWG 4-20 mA.Para este transmisor de posición, la vigilancia de lainterrupción de señal está activa.
Parámetro 2 “Código datos transmisor de posición”Valor por defecto: 00: 0 - 100 por cien, resolución 1%El valor del transmisor de posición es establecido en byte 4 de la entradade representación de proceso. Byte 3 está fijado a valor 0.El setpoint está determinado en byte 4 de la salida de representación deproceso. Byte 3 debe ser ajustado a 0.1: 0 - 1000 por mil, resolución 0,1%El valor del transmisor de posición es leído en bytes 3 y 4 de la entradade representación de proceso.El setpoint está determinado en bytes 3 (byte alto) y 4 (byte bajo) de lasalida de representación de proceso.
Parámetro 3 “Prevención de inversión en ms”Valor por defecto: 200valor más bajo: 100 (0,1s)valor más alto: 1000 (1 s)
Parámetro para el ajuste del tiempo de pausa entre inversiones del sentidode giro. Si es necesario, ajustar el valor para evitar posibles dañosprovocados por una inversión demasiado rápida.
16
Actuadores eléctricos multi-vueltas y 1/4 de vueltaen versión AUMA MATIC con interface PROFIBUS-DP Instrucciones de servicio

Parámetro 4 “Redundancia”Valor por defecto: 00: sin redundancia de cable (sólo un canal de comunicación).1: redundancia activada (canales 1 y 2 conectados).El 'watchdog' debe estar activado, de lo contrario el conjunto de parámetrosserá rechazado por el esclavo DP.
Parámetro 5 ”Tiempo para cambio de canal en 0,1 s"Valor por defecto: 50valor más bajo: 50 (5 s)valor más alto: 6000 (10 min)
Establece el tiempo tras el cual se cambia de canal si la transmisión dedatos es interrumpida (no estado 'Data Exchange' o DP-Fail-Safe).Este parámetro sólo es efectivo si la redundancia de cable (parámetro 4)está activada.
Parámetro 6 “Comportamiento de seguridad”Valor por defecto: 00: Comportamiento de seguridad desactivado (parám. 7,8,9 irrelevantes)1: Comportamiento de seguridad simple activado.
Se iniciará una maniobra de seguridad sólo si la conexión con elmaestro (transmisión de datos) ya existía.
2: Comportamiento de seguridad extendido activado
Si el comportamiento de seguridad extendido está activado,se puede iniciar una maniobra de seguridad inmediatamentedespués que el actuador es conectado.
Maniobra de seguridad tras fallo de conexión (no estado Data_Exchange oDP-Fail-Safe).Los parámetros ajustados en la conexión más reciente también sonaplicables al comportamiento de seguridad tras una interrupción en latensión de alimentación.Si el parámetro es ajustado a valores 1 ó 2, el 'watchdog' debe ser activado,de lo contrario el conjunto de parámetros será rechazado por el esclavo DP.
Parámetro 7 “Tiempo inicio maniobra de seguridad en 0,1 s”Valor por defecto: 30valor más bajo: 0 (el actuador reacciona inmediatamente)valor más alto: 12000 (el actuador reacciona tras 20 minutos)
Tiempo de inicio de la maniobra de seguridad en 0,1 s.Indica el retardo en la transmisión de datos para el inicio de la maniobra deseguridad. Si se restaura la transmisión durante este tiempo, no seefectuará la maniobra de seguridad.
Parámetro 8 “Maniobra de seguridad”Valor por defecto: 00: El actuador permanece en su posición.1: El actuador va a posición CERRADO.2: El actuador va a posición ABIERTO.3 El actuador va a la posición de seguridad (ver parámetro 9).
Si no existe transmisor de posición (Parámetro 1 = 0), el valor 3 no estápermitido y el conjunto de parámetros es rechazado.
17
Actuadores eléctricos multi-vueltas y 1/4 de vueltaInstrucciones de servicio en versión AUMA MATIC con interface PROFIBUS-DP
Parámetro 9 “Posición de seguridad en tanto por mil”Valor por defecto: 0valor más bajo: 0 posición final CERRADOvalor más alto: 1000 posición final ABIERTOEl actuador se dirige a la posición de seguridad determinada.Este parámetro sólo es efectivo si el parámetro 8 (maniobra de seguridad)es 3 y el parámetro 6 (Comportamiento de seguridad) es distinto de 0.
Parámetro 10 “Velocidad de maniobra de seguridad en tanto por cien”Valor por defecto: 100valor más bajo: 0 (velocidad mínima)valor más alto: 100 (velocidad máxima)
Velocidad a la que se alcanzará la posición de seguridad.Sólo efectivo para actuadores con velocidad ajustable, gamas AS, ASR,SARV.Sólo efectivo si el parámetro 8 (Maniobra de seguridad) y parámetro 6(Comportamiento de seguridad) son distintos de 0.
Descripción detallada de parámetros 11 a 14 en epígrafe 10.2.
Parámetro 11 “Tiempo muerto posicionador en 0,1 s”Valor por defecto: 0valor más bajo: 0 (el actuador reacciona inmediatamente)valor más alto: 600 (el actuador retrasa la reacción max. 1 minuto)
Indica el tiempo que debe transcurrir entre dos arrancadas del motor.Si el control envía una orden antes de ese tiempo, el actuador retrasa sureacción hasta que el tiempo muerto ha expirado.
El control debe asegurar que el actuador no sobrepasa elnúmero máximo de arrancadas permisible.
Parámetro 12 “Post-recorrido sentido ABRIR en tanto por mil”Valor por defecto: 5valor más bajo: 0 (sin post-recorrido en sentido ABRIR)valor más alto: 100 (10 % post-recorrido en sentido ABRIR)
El motor es desconectado cuando la distancia entre la posición delactuador y la posición nominal alcanza el valor determinado. Esto essolamente válido para maniobras en sentido ABRIR.
El valor de este parámetro debe ser menor que el del parámetro 14 (Errormax. en tanto por mil).
Parámetro 13 “Post-recorrido sentido CERRAR en tanto por mil”Valor por defecto: 5valor más bajo: 0 (sin post-recorrido en sentido CERRAR)valor más alto: 100 (10 % post-recorrido en sentido CERRAR)
El motor es desconectado cuando la distancia entre la posición delactuador y la posición nominal alcanza el valor determinado. Esto essolamente válido para maniobras en sentido CERRAR.
El valor de este parámetro debe ser menor que el del parámetro 14 (Errormax. en tanto por mil).
Parámetro 14 “ Error max. en tanto por mil”Valor por defecto: 10valor más bajo: 1 (error 0,1%).valor más alto: 100 (error 10%).
18
Actuadores eléctricos multi-vueltas y 1/4 de vueltaen versión AUMA MATIC con interface PROFIBUS-DP Instrucciones de servicio
El actuador se moverá sólo si la desviación entre la posición nominal y lareal es al menos igual a este valor.Se corresponde con la banda muerta externa.El valor de este parámetro debe ser mayor que el de los parámetros 12(Post-recorrido ABRIR) y 13 (Post-recorrido CERRAR).
El valor del parámetro debe ser lo suficientemente altocomo para asegurar un funcionamiento estable delposicionador. Si el valor es demasiado bajo, el actuador semovería continuamente dentro del rango del valor nominal,lo que conlleva un acortamiento de la vida útil del actuador.
Parámetro 15 “Operación proporcional activa”Valor por defecto: 00: sin arranque suave / parada suave (operación proporcional)1: arranque suave / parada suave (operación proporcional)
Parámetros 15 - 19 reservados para actuadores convelocidad ajustable tipos AS, ASR, SARV con controlAUMA VARIOMATIC.
Arranque suave/ parada suave sólo es posible en combinación conactuadores de velocidad ajustable, tipos AS, ASR y SARV. Este parámetrono tiene influencia en actuadores con velocidad no ajustable.
Parámetro 16 “Parada rango proporcional en tanto por mil”Valor por defecto: 100valor más bajo: 0 (parada suave inhabilitada)valor más alto: 1000 (parada suave en todo el recorrido)
Rango proporcional de la posición nominal en tanto por mil (parada suave).Si la diferencia entre las posiciones nominal y real del actuador es menorque este valor, la velocidad decrecerá proporcionalmente a la diferencia en-tre ambas posiciones. De ese modo, la posición nominal es alcanzada deforma suave.Sólo efectivo si los parámetros 15 (Operación proporcional activa) y 1(transmisor de posición) son distintos de 0.
Parámetro 17 “Velocidad parada en tanto por ciento”Valor por defecto: 0valor más bajo: 0 (el actuador se dirige a la pos. nominal a velocidad min.)valor más alto:100 (el actuador se dirige a la pos. nominal a velocidad
max.).
Velocidad a la que la posición nominal será alcanzada.Sólo efectivo si los parámetros 15 (Operación proporcional activa) y 1(transmisor de posición) son distintos de 0.
Parámetro 18 “Arranque rango proporcional en tanto por mil”Valor por defecto: 40valor más bajo: 0 (arranque suave inhabilitado)valor más alto: 1000 (arranque suave en todo el recorrido)
Rango proporcional de la posición de arranque en tanto por mil (arranquesuave). Si la diferencia entre las posiciones de arranque y real del actuadores menor que este valor, la velocidad aumentará proporcionalmente a ladiferencia entre las posiciones nominal y real. De ese modo, la posición dearranque es abandonada de forma suave.Sólo efectivo si los parámetros 15 (Operación proporcional activa) y 1(transmisor de posición) son distintos de 0.
19
Actuadores eléctricos multi-vueltas y 1/4 de vueltaInstrucciones de servicio en versión AUMA MATIC con interface PROFIBUS-DP
Parámetro 19 “Velocidad de arranque en tanto por ciento”Valor por defecto: 50valor más bajo: 0 (velocidad de arranque mínima)valor más alto: 100 (velocidad de arranque máxima)
Velocidad a la que se abandona la posición de arranqueSólo efectivo si los parámetros 15 (Operación proporcional activa) y 1(transmisor de posición) son distintos de 0.
Parámetro 20 “Inicio entrada analógica 2 en 0,1 mA”Valor por defecto: 0valor más bajo: 0 (valor para sensor con salida 0-20 mA)valor más alto: 150
Intensidad con la que comienza el rango de medida de la entrada analógica2 (opción). Este valor debe ser menor que el del parámetro 21 (Fin entradaanalógica 2 en 0,1 mA).Si el sensor está conectado con 4..20 mA a la entrada analógica 2, el valordebe ser ajustado a 40.
Parámetro 21 “Fin entrada analógica 2 en 0,1 mA”Valor por defecto: 200valor más bajo: 50valor más alto: 200 (Valor para sensor con salida 0-20 mA ó
4-20 mA)
Intensidad con la que finaliza el rango de medida de la entrada analógica 2(opción). Este valor debe ser mayor que el del parámetro 20 (Inicio entradaanalógica 2 en 0,1 mA).
Parámetro 22 “Código entrada analógica 2"Valor por defecto: 00: 0 - 100 por cien1: 0 - 1000 por mil2: 0 - 1023 (valor bruto del convertidor analógico-digital, no estandarizado)
Parámetro 23 “Inicio entrada analógica 3/4 en 0,1 mA”Valor por defecto: 0valor más bajo: 0 (valor para sensor con salida 0-20 mA)valor más alto: 150
Intensidad con la que comienza el rango de medida de la entrada analógica3/4. Este valor debe ser menor que el del parámetro 24 (Fin entradaanalógica 3/4).Si el sensor está conectado con 4..20 mA a la entrada analógica 3/4, elvalor debe ser ajustado a 40.
Parámetro 24 “Fin entrada analógica 3/4 en 0,1 mA”Valor por defecto: 200valor más bajo: 50valor más alto: 200 (Valor para sensor con salida 0-20 mA ó
4-20 mA)
Intensidad con la que finaliza el rango de medida de la entrada analógica3/4. Este valor debe ser mayor que el del parámetro 23 (Inicio entradaanalógica 3/4).
20
Actuadores eléctricos multi-vueltas y 1/4 de vueltaen versión AUMA MATIC con interface PROFIBUS-DP Instrucciones de servicio

Parámetro 25 “Código entrada analógica 3/4"Valor por defecto: 00: 0 - 100 por cien1: 0 - 1000 por mil2: 0 - 1023 (valor bruto del convertidor analógico-digital, no estandarizado)
El modo por pasos incrementa el número de arrancadas delactuador. Debe asegurarse que, con el modo por pasos, elnúmero máximo de arrancadas permisible no es excedido.
Parámetro 26 “Modo por pasos sentido ABRIR activo”:Valor por defecto: 00: Modo por pasos en sentido ABRIR desactivado1: Modo por pasos en sentido ABRIR activado
Este parámetro sólo es efectivo si el parámetro 1 (Transmisor de posición)es distinto de 0. De lo contrario, el conjunto de parámetros será rechazado.
Parámetro 27 “Tiempo operación por pasos ABRIR en 0,1 s”Valor por defecto: 10valor más bajo: 1 (El actuador se mueve 0,1 s por periodo)valor más alto: 36000 (El actuador se mueve 1 hora por periodo)
Tiempo de operación por pasos en sentido ABRIR en 0,1 s.Este parámetro sólo es efectivo si el parámetro 26 (Modo por pasos sentidoABRIR activo) es distinto de 0.
Parámetro 28 “Tiempo de pausa ABRIR en 0,1 s”Valor por defecto: 50valor más bajo: 1 (Actuador estacionario 0,1 s por periodo)valor más alto: 36000 (Actuador estacionario 1 hora por periodo)
Tiempo de pausa en sentido ABRIR en 0,1 sEste parámetro sólo es efectivo si el parámetro 26 (Modo por pasos sentidoABRIR activo) es distinto de 0.
Parámetro 29 “Inicio modo por pasos ABRIR en tanto por mil”Valor por defecto: 0valor más bajo: 0 (el modo por pasos sentido ABRIR comienza en 0,
posición final CERRADO)valor más alto: 999
Posición de inicio del modo por pasos en sentido ABRIR en tanto por mil.Este valor debe ser menor que el valor del parámetro 30 (Fin modo porpasos ABRIR en tanto por mil), de lo contrario el conjunto de parámetrosserá rechazado. Este parámetro sólo es efectivo si el parámetro 26 (Modopor pasos sentido ABRIR activo) es distinto de 0.
Parámetro 30 “Fin modo por pasos ABRIR en tanto por mil”Valor por defecto: 1000valor más bajo: 1valor más alto: 1000 (el modo por pasos sentido ABRIR finaliza en
1000 posición final ABIERTO)
Posición de finalización del modo por pasos en sentido ABRIR en tanto pormil. Este valor debe ser mayor que el valor del parámetro 29 (Inicio modopor pasos ABRIR en tanto por mil), de lo contrario el conjunto deparámetros será rechazado. Este parámetro sólo es efectivo si el parámetro26 (Modo por pasos sentido ABRIR activo) es distinto de 0.
21
Actuadores eléctricos multi-vueltas y 1/4 de vueltaInstrucciones de servicio en versión AUMA MATIC con interface PROFIBUS-DP

Parámetro 31 “Modo por pasos sentido CERRAR activo”:Valor por defecto: 00: Modo por pasos en sentido CERRAR desactivado1: Modo por pasos en sentido CERRAR activado
Este parámetro sólo es efectivo si el parámetro 1 (Transmisor de posición)es distinto de 0. De lo contrario, el conjunto de parámetros será rechazado.
Parámetro 32 “Tiempo operación por pasos CERRAR en 0,1 s”Valor por defecto: 10valor más bajo: 1 (El actuador se mueve 0,1 s por periodo)valor más alto: 36000 (El actuador se mueve 1 hora por periodo)
Tiempo de operación por pasos en sentido CERRAR en 0,1 s.Este parámetro sólo es efectivo si el parámetro 31 (Modo por pasos sentidoCERRAR activo) es distinto de 0.
Parámetro 33 “Tiempo de pausa CERRAR en 0,1 s”Valor por defecto: 50valor más bajo: 1 (Actuador estacionario 0,1 s por periodo)valor más alto: 36000 (Actuador estacionario 1 hora por periodo)
Tiempo de pausa en sentido CERRAR en 0,1 sEste parámetro sólo es efectivo si el parámetro 31 (Modo por pasos sentidoCERRAR activo) es distinto de 0.
Parámetro 34 “Inicio modo por pasos CERRAR en tanto por mil”Valor por defecto: 1000valor más bajo: 1valor más alto: 1000 (el modo por pasos sentido CERRAR
comienza en posición 1000, ABIERTO)
Posición de inicio del modo por pasos en sentido CERRAR en tanto por mil.Este valor debe ser mayor que el valor del parámetro 35 (Fin modo porpasos CERRAR en tanto por mil), de lo contrario el conjunto de parámetrosserá rechazado. Este parámetro sólo es efectivo si el parámetro 31 (Modopor pasos sentido CERRAR activo) es distinto de 0.
Parámetro 35 “Fin modo por pasos CERRAR en tanto por mil”Valor por defecto: 0valor más bajo: 0 (el modo por pasos sentido CERRAR finaliza en
posición 0, CERRADO)valor más alto: 999
Posición de finalización del modo por pasos en sentido CERRAR en tantopor mil. Este valor debe ser mayor que el valor del parámetro 34 (Iniciomodo por pasos CERRAR en tanto por mil). Este parámetro sólo es efectivosi el parámetro 31 (Modo por pasos sentido CERRAR activo) es distinto de0, de lo contrario el conjunto de parámetros será rechazado
Parámetros 36 a 50 están reservadosReservados para ampliaciones.Valor por defecto: 0Rango de valor: 0 a 65535
22
Actuadores eléctricos multi-vueltas y 1/4 de vueltaen versión AUMA MATIC con interface PROFIBUS-DP Instrucciones de servicio

8. Entrada de representación de procesoA través de la entrada de representación de proceso, el maestro (control)puede leer el estado del esclavo (actuador).
8.1 Entrada de representación de proceso (representación de proceso por defecto)
23
Actuadores eléctricos multi-vueltas y 1/4 de vueltaInstrucciones de servicio en versión AUMA MATIC con interface PROFIBUS-DP
Bit7
Bit6
Bit5
Bit4
Bit3
Bit2
Bit1
Bit0
Bit7
Bit6
Bit5
Bit4
Bit3
Bit2
Bit1
Bit0
Bit7
Bit6
Bit5
Bit4
Bit3
Bit2
Bit1
Bit0
Bit7
Bit6
Bit5
Bit4
Bit3
Bit2
Bit1
Bit0
Bit7
Bit6
Bit5
Bit4
Bit3
Bit2
Bit1
Bit0
Bit7
Bit6
Bit5
Bit4
Bit3
Bit2
Bit1
Bit0
Operación lógica Switches actuador
DS
R
DÖ
L
WS
R
WÖ
L
Se
l.L
OC
AL
Se
l.R
EM
OT
O
Fa
lloa
lime
nt.
TH
Ord
en
inco
rre
cta
Se
l.N
oR
EM
OT
O
Fa
llote
rmo
Fa
lloa
lime
nta
ció
n
Fa
lloD
ÖL
Fa
lloD
SR
Esta
do
CL
EA
R
--
Fa
lloa
lim.
24
V
Ca
na
l2
activo
Int.
se
ñ.t
ran
s.p
os.
Fa
lloco
n.t
ran
s.p
os.
Fa
lloH
w
No
ma
n.
refe
ren
cia
----
En
tra
da
dig
.0
En
tra
da
dig
.1
En
tra
da
dig
.2
En
tra
da
dig
.3
--
Int.
se
ñ.
en
t.a
na
l.1
Int.
se
ñ.
en
t.a
na
l.2
--
Fallo Aviso Operación física Opciones
Byte altoPrimera entrada analógica
(diagrama cableado Analogue 2)
Byte altoSegunda entrada analógica
(diagrama cableado Analogue 3/4)
Reservado Reservado Reservado Reservado
Byte1: Byte 2:
Byte 7:
Byte 3
Byte 6:Byte 5:
Byte 4
Byte 8:
Byte16Byte15Byte14Byte13
Byte12Byte 11Byte 10Byte 9
Transmisor posiciónbyte alto
Transmisor posiciónbyte bajo
Es
AB
IER
TO
Es
CE
RR
AD
O
Es
NO
MIN
AL
-
Op
er.
AB
RIR
Op
er.
CE
RR
AR
Avis
o
Fa
llo
Pre
v.In
v./
t.m
uert
o
Op
era
ció
np
rop
orc
.
Pa
usa
En
tr.
Ra
ng
op
aso
s
Re
mo
toA
BR
IR
Re
mo
toC
ER
RA
R
Lo
ca
lA
BR
IR
Lo
ca
lC
ER
RA
R
Byte bajoPrimera entrada analógica
(diagrama cableado Analogue 2)
Byte bajoSegunda entrada analógica
(diagrama cableado Analogue 3/4)

8.2 Entrada de representación de proceso (Representación de proceso por defecto)
Byte 1: Operación lógicaSeñales importantes delactuador sobre errores,avisos, operaciones:
24
Actuadores eléctricos multi-vueltas y 1/4 de vueltaen versión AUMA MATIC con interface PROFIBUS-DP Instrucciones de servicio
Bit Denominación Valor Descripción
0
Es ABIERTODesc.enABIERTO porfin.carrera
1 Final de carrera apertura actuado
0 distinto
1
Es CERRADODesc.enCERRADO porfin.carrera
1 Final de carrera cierre actuado
0 distinto
Es CERRADODesc.enCERRADO porpar
1 Limitador de par y final de carrera de cierre actuados
0 distinto
2 Es NOMINAL1
Posición valor nominal dentro del error max. (bandamuerta externa). La señal se produce sólo si elmaestro PROFIBUS ha establecido el bit deoperación nominal.
0 distinto
3 No utilizado Reservado para ampliaciones
4 OperaciónABRIR
1
Ejecutada orden de maniobra (ABRIR o NOMINAL)del PROFIBUS en sentido ABRIR. Para modo porpasos, esta señal también está activa durante eltiempo de pausa, tiempo muerto y prevención deinversión.
0 Ninguna maniobra a través del PROFIBUS.
5 OperaciónCERRAR
1
Ejecutada orden de maniobra (CERRAR oNOMINAL) del PROFIBUS en sentido CERRAR.Para modo por pasos, esta señal también está activadurante el tiempo de pausa, tiempo muerto yprevención de inversión.
0 Ninguna maniobra a través del PROFIBUS.
6 Aviso1 Emitidos uno o varios avisos (al menos un bit
establecido en byte de aviso).
0 Ningún aviso activo (todos los bits cancelados enbyte de aviso).
7 Fallos1
Uno o varios fallos han ocurrido, por lo que elactuador ya no puede ser controlado en elPROFIBUS (al menos un bit establecido en byte defallo).
0 Ningún fallo activo (todos los bits cancelados en bytede fallo).

Byte 2: Switches actuadorSeñales básicas generadaspor la lógica
Byte 3: Transmisor de posición byte altoPosición del actuador
Byte 4: Transmisor de posición byte bajoTransmisor de posición,valor completo del byte bajo
Byte 5: Fallo(no listo para operaciónremota si el bit 7 del byte 1está establecido)
25
Actuadores eléctricos multi-vueltas y 1/4 de vueltaInstrucciones de servicio en versión AUMA MATIC con interface PROFIBUS-DP
BitDenominación Valor Descripción
0 TH1 Fallo térmico (protección del motor)
0 No fallo térmico
1 Falloalimentación
1 Fallo de alimentación: fallo de fase
0 No fallo de alimentación
2 SelectorREMOTO
1 Selector en posición REMOTO
0 Selector NO en posición REMOTO
3 SelectorLOCAL
1 Selector en posición LOCAL.
0 Selector NO en posición LOCAL
4 WÖL1 Final de carrera apertura izda. actuado
0 Final de carrera apertura izda. no actuado
5 WSR1 Final de carrera cierre dcha. actuado
0 Final de carrera cierre dcha. no actuado
6 DÖL1 Lim.de par apertura izda. actuado (almacenando)
0 Lim.de par apertura izda no actuado
7 DSR1 Lim.de par cierre dcha. actuado (almacenando)
0 Lim.de par cierre dcha. no actuado
Condición Valor
Parámetro 2 (cód. datos deltransm. de posición) = 0 Valor sin efecto
Parámetro 2 (cód. datos deltransm. de posición) = 1 Byte alto de valor 0..1000
Condición Valor
Parámetro 2 (cód. datos deltransm. de posición) = 0 Rango 0..100
Parámetro 2 (cód. datos deltransm. de posición) = 1 Byte bajo de valor 0..1000
Bit Valor Descripción
01
Orden incorrecta: se envió una combinación de bits que no se puedeejecutar -más de un bit de operación (ABRIR, CERRAR, NOMINAL)establecido al mismo tiempo, valor nominal fuera de rango 0.. 100 ó0.. 1000, u operación nominal antes de maniobra de referencia
0 distinto
11 Selector NO en posición REMOTO
0 distinto
21 Fallo térmico (protección de motor)
0 distinto
31 Fallo de alimentación, fallo de fase: inversión de fases
0 distinto

Bit 7 no utilizado (reservado para ampliaciones).
Byte 6: Aviso(bit 6 del byte 1):
Bits 6 y 7 no utilizados (reservados para ampliaciones).
Byte 7: Operación física
26
Actuadores eléctricos multi-vueltas y 1/4 de vueltaen versión AUMA MATIC con interface PROFIBUS-DP Instrucciones de servicio
Bit Valor Descripción
01 Fallo alimentación 24 V, fuente de alimentación
0 distinto
11 Canal 2 activo
0 distinto
21 Interrupción de señal del trans.posición RWG: para ser reconocida, el
valor del parámetro 1 debe ser 3 (RWG 4-20 mA)
0 distinto
31 Fallo de potenciómetro: para pos.final CERRADO se señaliza el valor
más alto, para ABIERTO, el más bajo
0 distinto
41 Fallo de hardware: si este bit está establecido se deberá comprobar la
tarjeta PROFIBUS
0 distinto
51
No maniobra de referencia: los valores del trans.de posición no puedenser usados hasta que no se efectúe la maniobra de referencia (pos.ABIERTO y CERRADO). No es posible la operación nominal.
0 distinto
41 Fallo DÖL. Par inesperado en sentido ABRIR
0 distinto
51 Fallo DSR. Par inesperado en sentido CERRAR
0 distinto
61 Esclavo en estado CLEAR
0 Esclavo en estado OPERATE
Bit Valor Descripción
01
Prevención de inversión/ aviso tiempo muerto. El actuador no arrancacuando la prevención de inversión o el tiempo muerto aún estánactivos. El bit es establecido si existe una orden de maniobra que nose puede ejecutar inmediatamente. El bit es cancelado una vez que elactuador arranca.
0 distinto
1Sección proporcional alcanzada (parada o arranque suave).Sólo posible para actuadores con vel. ajustable tipos AS, ASR y SARVcon AUMA VARIOMATIC PROFIBUS-DP.
21 Pausa modo por pasos
0 distinto
31
Rango modo por pasos alcanzado: el transm.de posición está dentrodel rango por pasos. Condiciones: trans.de posición existente, modopor pasos activo, operación remota ejecutada.
0 distinto
41
Operación remota ABRIR través del PROFIBUS (bit de operac.remotade la tarjeta lógica establecido y movimiento de potenciómetrodetectado). Señalización requiere trans.de posición.
0 distinto
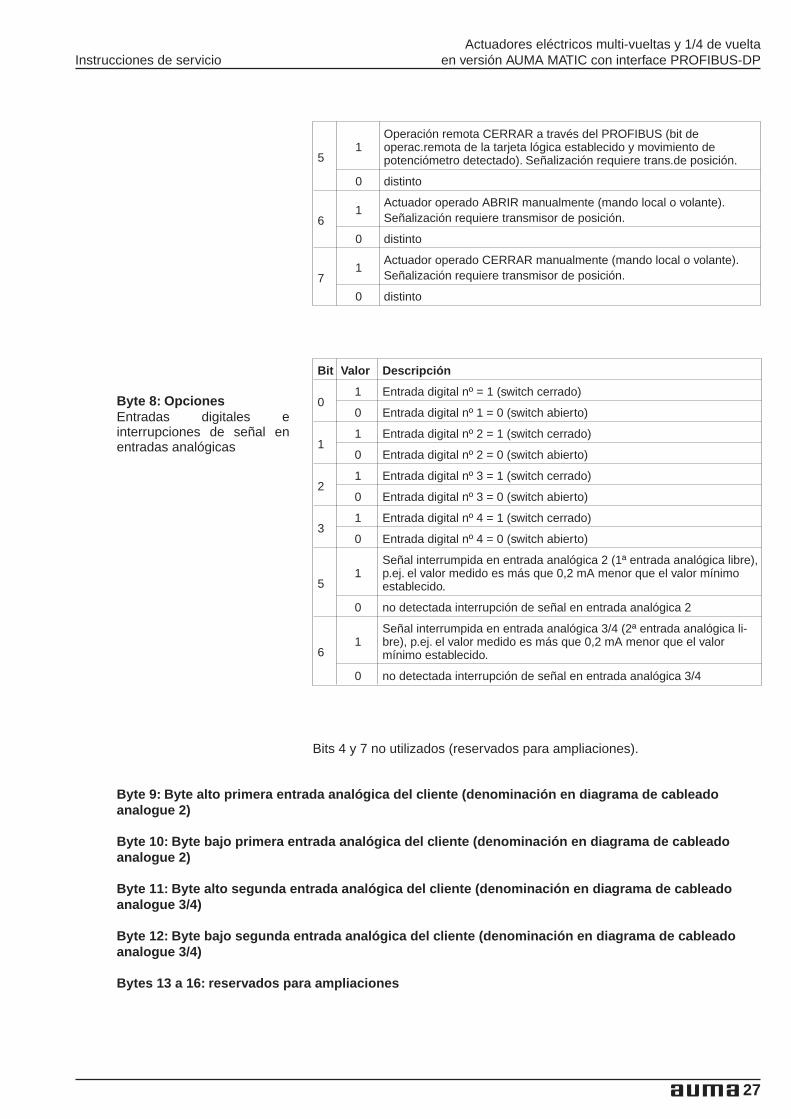
Byte 8: OpcionesEntradas digitales einterrupciones de señal enentradas analógicas
Bits 4 y 7 no utilizados (reservados para ampliaciones).
Byte 9: Byte alto primera entrada analógica del cliente (denominación en diagrama de cableadoanalogue 2)
Byte 10: Byte bajo primera entrada analógica del cliente (denominación en diagrama de cableadoanalogue 2)
Byte 11: Byte alto segunda entrada analógica del cliente (denominación en diagrama de cableadoanalogue 3/4)
Byte 12: Byte bajo segunda entrada analógica del cliente (denominación en diagrama de cableadoanalogue 3/4)
Bytes 13 a 16: reservados para ampliaciones
27
Actuadores eléctricos multi-vueltas y 1/4 de vueltaInstrucciones de servicio en versión AUMA MATIC con interface PROFIBUS-DP
Bit Valor Descripción
01 Entrada digital nº = 1 (switch cerrado)
0 Entrada digital nº 1 = 0 (switch abierto)
11 Entrada digital nº 2 = 1 (switch cerrado)
0 Entrada digital nº 2 = 0 (switch abierto)
21 Entrada digital nº 3 = 1 (switch cerrado)
0 Entrada digital nº 3 = 0 (switch abierto)
31 Entrada digital nº 4 = 1 (switch cerrado)
0 Entrada digital nº 4 = 0 (switch abierto)
51
Señal interrumpida en entrada analógica 2 (1ª entrada analógica libre),p.ej. el valor medido es más que 0,2 mA menor que el valor mínimoestablecido.
0 no detectada interrupción de señal en entrada analógica 2
61
Señal interrumpida en entrada analógica 3/4 (2ª entrada analógica li-bre), p.ej. el valor medido es más que 0,2 mA menor que el valormínimo establecido.
0 no detectada interrupción de señal en entrada analógica 3/4
51
Operación remota CERRAR a través del PROFIBUS (bit deoperac.remota de la tarjeta lógica establecido y movimiento depotenciómetro detectado). Señalización requiere trans.de posición.
0 distinto
61
Actuador operado ABRIR manualmente (mando local o volante).Señalización requiere transmisor de posición.
0 distinto
71
Actuador operado CERRAR manualmente (mando local o volante).Señalización requiere transmisor de posición.
0 distinto

9. Salida de representación de procesoA través de la salida de representación de proceso, el maestro (control)puede controlar el esclavo (actuador).
Para realizar operaciones remotas, el mando local debeestar establecido en 'Remoto NOMINAL'.
Solamente se puede establecer un bit de operación en un determinadomomento. Si se establecen varios bits de operación simultáneamente, elactuador se detiene y señaliza el fallo 'orden incorrecta'.
Byte 1: ÓrdenesBits de operación y salidasdigitales.
Bits 3-7 están reservados para ampliaciones y deben tener valor 0.
28
Actuadores eléctricos multi-vueltas y 1/4 de vueltaen versión AUMA MATIC con interface PROFIBUS-DP Instrucciones de servicio
Bit Denominación Valor Descripción
0 Remoto ABRIR1 Marcha ABRIR
0 No marcha ABRIR
1 RemotoCERRAR
1 Marcha CERRAR
0 No marcha CERRAR
2 RemotoNOMINAL
1Marcha a valor nominalsólo posible si existe transmisor de posición(potenciómetro / RWG (opciones)
0 No marcha a valor nominal
Bit7
Bit6
Bit5
Bit4
Bit3
Bit2
Bit1
Bit0
Reservado Reservado Reservado Reservado
Velocidad Posición setpoint byte alto Posición setpoint byte bajo
Rem
oto
NO
MIN
AL
Rem
oto
CE
RR
AR
Rem
oto
AB
RIR
Byte 1: Orden
Byte 8Byte 7Byte 6Byte 5
Byte 4Byte 3Byte 2

Byte 2: Velocidad nominal: Este byte sólo es efectivo con actuadores de velocidad ajustable, tipos AS,ASR y SARV.
Rango de valor: 0..100:Vel. mínima: 0 (el actuador marcha con vel. mínima)Vel. máxima: 100 (el actuador marcha con vel. máxima)
Byte 3: Posición setpoint byte alto
Byte 4: Posición setpoint byte bajo
Bytes 5 a 8: reservados para ampliaciones, deben tener valor 0.
10. Descripción de las funciones del actuador10.1 Órdenes para servicio ABRIR / CERRAR
Las órdenes de maniobra están determinadas por los bits de órdenes y elvalor nominal (setpoint) de la entrada de representación de proceso.Solamente se puede establecer un bit de operación en un determinadomomento. Si se establecen varios bits de operación simultáneamente, no serealiza ninguna maniobra y se señaliza el fallo 'orden incorrecta'. Para evitarforzar la mecánica, el actuador está equipado con un retardo programableen la inversión de sentido (prevención de inversión).
Se requieren los siguientes bits para servicio ABRIR / CERRARRemotoABRIRRemotoCERRAR
Operación remota ABRIR / PARARRemotoABRIR = 1 El actuador marcha en sentido ABRIR.RemotoABRIR = 0 El actuador se detiene.
El actuador es desconectado automáticamente cuando la posición finalABIERTO es alcanzada (final de carrera LSO (WÖL)).Los fallos (protección térmica, fallo alimentación, par) detienen la maniobra.
Operación remota CERRAR / PARARRemotoCERRAR = 1 El actuador marcha en sentido CERRAR.RemotoCERRAR = 0 El actuador se detiene.
El actuador es desconectado automáticamente cuando la posición finalCERRADO es alcanzada (final de carrera LSC (WSR) ó LSC (WSR) y TSC(DSR) para desconexión por par).Los fallos (protección térmica, fallo alimentación, par) detienen la maniobra.
29
Actuadores eléctricos multi-vueltas y 1/4 de vueltaInstrucciones de servicio en versión AUMA MATIC con interface PROFIBUS-DP
Condición Valor
Parámetro 2 (cód. datos deltransmisor posición) = 0 Este byte debe tener valor 0
Parámetro 2 (cód. datos deltransmisor posición) = 1
Este byte determina la parte de valor más alto(byte alto) del valor nominal
Condición Valor
Parámetro 2 (cód. datos deltransmisor posición) = 0 Rango 0..100
Parámetro 2 (cód. datos deltransmisor posición) = 1
Este byte determina la parte de valor másbajo (byte bajo) del valor nominal

Operación remota a posición nominal (NOMINAL) / STOP
El posicionador sólo funciona si el actuador está equipado con transmisorde posición, p.ej. potenciómetro / RWG (opción).
RemotoNOMINAL = 1 El actuador marcha hacia el valor nominal establecido.RemoteNOMINAL = 0 El actuador se detiene.
La posición nominal se puede establecer en % ó en ‰.Para cambiar de unidad, utilizar el parámetro 2.(Código de datos del transmisor de posición).Los fallos (protección térmica, fallo alimentación, par) detienen la maniobraa través del posicionador.
Con un setpoint de 0 % ó 0 ‰ el actuador marcha a posición finalCERRADO.Con un setpoint de 100 % ó 1000 ‰ el actuador marcha a posición finalABIERTO.Si el setpoint es mayor que 100 % ó 1000 ‰, no hay movimiento y seseñaliza el fallo 'orden incorrecta'.
10.2 Posicionador El posicionador es activado por el bit ‘RemotoNOMINAL’.El posicionador es un controlador de tres posiciones. A través de la posición'NOMINAL' de la entrada de representación de proceso, el valor nominal deposición es transmitido cíclicamente al actuador como variable nominal(tiempo de ciclo = tiempo ciclo bus DP). El posicionador integrado en elcontrol AUMA MATIC suministra la señal de posición para el control del mo-tor dependiendo de los valores nominal y real. La señal de posición (valorreal de la posición del actuador) es generado internamente por el actuador.
El transmisor de posición compara el valor nominal requerido por el controlcon el valor generado por el actuador. Si la diferencia de valores es mayorque el error max. establecido (parámetro 14), el posicionador envía unaorden de maniobra al motor, dependiendo del error, tanto en sentido ABRIRcomo CERRAR.
30
Actuadores eléctricos multi-vueltas y 1/4 de vueltaen versión AUMA MATIC con interface PROFIBUS-DP Instrucciones de servicio
50 %Valor nominalalcanzado
Errormax.= 1 %
ABIERTO 100 %
CERRADO 0 %
Posición del actuador
50,5 %
49 %
49,5 %
51 %
Motor desconectado
Valornominal
Ba
nd
am
ue
rta
ext
.
Post
-re
co
rrid
o
Figura G: Servicio de regulación. Operación nominal despuésdel 50 %

Post-recorrido (banda muerta interna)La banda muerta interna determina el punto de desconexión del actuador.Este punto se puede establecer en ambos sentidos mediante losparámetros 12 y 13 (página 18), de forma que el actuador se detenga lomás cerca posible del valor nominal.
Error max. (banda muerta externa)La banda muerta externa determina el punto de arranque del actuador. Si elerror o un cambio en el valor nominal es mayor que el error max.establecido con el parámetro 14 (página 18), el motor arranca.
El valor del parámetro debe ser lo suficientemente altocomo para asegurar un funcionamiento estable delposicionador. Si el valor es demasiado bajo, es probable queel número de arrancadas sea excesivo, lo que conlleva unacortamiento de la vida útil del actuador.
Tiempo muerto (t-off) El tiempo muerto evita el movimiento a una nueva posición nominal duranteun tiempo predeterminado. El tiempo muerto puede variar entre 0 y 1minuto y es establecido mediante el parámetro 11.
El control debe asegurar que el actuador no sobrepasa elnúmero máximo de arrancadas permisible. Esto se consigueestableciendo un valor suficientemente alto del parámetro11.
10.3 Modo por pasos El modo por pasos requiere un transmisor de posición (opción).El modo por pasos ralentiza el tiempo de maniobra durante parte o latotalidad del recorrido.
Ajuste de los tiempos de marcha y pausaLos tiempos de marcha y pausa en sentido abrir o cerrar se establecen conlos parámetros 27 a 33. Estos tiempos se pueden determinarindividualmente para ambos sentidos.
Indicación de maniobra por pasosLos estados de la maniobra por pasos son indicados por los bits 2 y 3 enbyte 7 de la salida de representación de proceso.
31
Actuadores eléctricos multi-vueltas y 1/4 de vueltaInstrucciones de servicio en versión AUMA MATIC con interface PROFIBUS-DP

11. Función de seguridad La función de seguridad permite el inicio de maniobras de emergencia encaso de eventos especiales, p.ej. cuando la comunicación entre actuador ymaestro es interrumpida. Esta función es establecida mediante losparámetros 6 a 10. La función de seguridad sólo puede ser iniciada si lafunción 'watchdog' está activada en el maestro.Cuando el actuador está en modo de seguridad, intenta alcanzareléctricamente la posición segura establecida.Si el actuador abandona posteriormente la posición segura (p.ej. con elmando manual), intentará alcanzar de nuevo la posición seguraeléctricamente cuando el selector se coloque en posición REMOTO.
Para evitar un nuevo movimiento hacia la posición seguradurante la operación manual, el selector del mando localdebe ser puesto en posición 'LOCAL' ó 'OFF' antes demover el volante.
El modo de seguridad puede ser activado por los siguientes eventos:
. Interrupción de comunicación con el maestro..El maestro va a estado CLEAR y envía:
o a) telegramas globales con el contenido CLEAR.o b) telegramas de datos de longitud 0 (modo fail safe
DP).
Tan pronto como la causa de la activación de la función de seguridaddesaparece (conexión restaurada, maestro en estado OPERATE), sepueden ejecutar de nuevo las órdenes de maniobra del maestro.
12. Descripción de la tarjeta PROFIBUS-DP
32
Actuadores eléctricos multi-vueltas y 1/4 de vueltaen versión AUMA MATIC con interface PROFIBUS-DP Instrucciones de servicio
S2S3
S4
S1.1S1.2
1 2 3 4 5 6 1 2 3 4 5 6 1 2 3 4
12
34
56
12
X8 PROFIBUS X11 AI 3/4 X10 AI 1
X12
AI
2X
7R
ES
ER
VE
X8 PROFIBUS X11 AI 3/4 X10 AI 1
X7 RESERVE
X12 AI 2
Figura H: TARJETA PROFIBUS-DP

12.1 Descripción de los switches
S1.1 Si se utiliza la entrada analógica externa X11 AI 3/4, el switch S1.1 debeestar en posición AI 3.
S1.2 Switch para ajuste de la señal de posición de válvula porpotenciómetro / RWG (opción).
S1.2 = V Si el actuador está equipado con potenciómetro sin RWG, este switchdebe estar en posición ‘V’.
S1.2 = mA Si el actuador tiene instalado un RWG (0..20 mA ó 4..20 mA), esteswitch debe estar en posición ‘mA’.
S2/S3 Switches giratorios para establecer la dirección PROFIBUS.Con estos dos switches se establece la dirección del actuador en la redPROFIBUS-DP. Direcciones disponibles de 0 hasta 125.
S2 Switch para establecer el dígito de unidades.
S3 Switch para establecer el dígito de decenas.
S4 Switch para establecer el tipo de desconexión en posición final CERRADO;por final de carrera o por par (en posición final ABIERTO, siempre por finalde carrera). Con este switch la tarjeta PROFIBUS-DP recibe la informaciónde qué tipo de desconexión debe ser utilizada en posición final CERRADO(por final de carrera o por par). El tipo de desconexión se ajusta en fábricade acuerdo con las instrucciones del pedido.
El tipo de desconexión en CERRADO debe ser el mismo enla tarjeta PROFIBUS-DP (switch S4) y en la pletina lógica(switch S1-2, figura J, página 36).
S4 = LIMIT Si el switch está en posición ‘LIMIT’ (izquierda, punto no visible), elactuador desconecta en CERRADO por final de carrera.
S4 = TORQUE Si el switch está en posición ‘TORQUE’ (derecha, punto visible),el actuador desconecta en CERRADO por par.
Posiciones por defecto
33
Actuadores eléctricos multi-vueltas y 1/4 de vueltaInstrucciones de servicio en versión AUMA MATIC con interface PROFIBUS-DP
S1.1 S1.2 S2 S3
AI 3V
( con potenciómetro)mA
(con RWG)0 2

12.2 Cableado de entradas y salidas en la tarjeta PROFIBUS-DP
X7 reserva Este conector proporciona pines para 4 entradas digitales
Estas señales son entradas libres que el procesador transmite 1:1 a laentrada de representación de proceso (byte 8, bits 0-3). Las entradas estánconectadas internamente con 0 V (resistores), si están abiertas. Paraconectar una entrada a 1 lógico, debe ser conectada a través de uninterruptor o relé a + 24 V (pin 5 o 6).
Se deben observar los diagramas de cableado propuestospara estas entradas (apéndice B). El tiempo de rebote de losinterruptores conectados no debería superar 1 ms.
X8 PROFIBUS En este conector se conectan las señales del bus y la tensión dealimentación, aislada galvánicamente, de la resistencia de terminación.
X10 AI 1 En este conector se conectan las señales requeridas por el transmisor deposición; potenciómetro o potenciómetro con RWG.
34
Actuadores eléctricos multi-vueltas y 1/4 de vueltaen versión AUMA MATIC con interface PROFIBUS-DP Instrucciones de servicio
Pin Descripción
1 + 5V para potenciómetro
2 AN 1: Señal analógica del transmisor de posición
3 GND (Tierra)
4 + 24V para RWG
Pin Descripción
1 R1: entrada digital 1
2 R2: entrada digital 2
3 R3: entrada digital 3
4 R4: entrada digital 4
5 + 24V
6 + 24V
Pin Descripción
1 Canal 1: Hilo B PROFIBUS
2 Canal 1: Hilo A PROFIBUS
3 Canal 2: Hilo A PROFIBUS (canal redundante)
4 Canal 2: Hilo B PROFIBUS (canal redundante)
5 GND-Float (Tierra PROFIBUS)
6 + 5V-Float (PROFIBUS + 5V)

X11 AI 3/4 Segunda entrada analógica del cliente.A través de esta entrada, se puede conectar al PROFIBUS un sensorexterno de 0/4-20mA.
Si el switch S1.1 está en el lado izquierdo en posición AI 3, el pin 5 (AN 4)está conectado a GND. La entrada AN 3 puede ser usada del mismo modoque AN 2.Si el switch está en el lado derecho en posición AI 3-AI 4, se puede realizaruna medición diferencial entre AN 3 y AN 4.
No es posible una medición diferencial libre de potencial.Siempre existe una conexión a GND. Se deben observar losdiagramas de cableado propuestos (apéndice B).
X12 AI 2 Primera entrada analógica del cliente.A través de esta entrada, se puede conectar al PROFIBUS un sensorexterno de 0/4-20mA.
Las entradas AN2, AN3 y AN4 no tienen aislamientogalvánico por opto-aislador.La carga máxima de los 24 V a través de los sensores nodebe exceder 40mA.
35
Actuadores eléctricos multi-vueltas y 1/4 de vueltaInstrucciones de servicio en versión AUMA MATIC con interface PROFIBUS-DP
Pin Descripción
1 + 24V
2 GND (Tierra)
3 GND (Tierra)
4 AN 3/4+: Señal analógica 0-20 mA (Positivo)
5 AN 3/4-: Señal analógica 0-20 mA (Negativo)
6 GND (Tierra)
Pin Descripción
1 AN 2: Señal analógica (0-20 mA)
2 GND (Tierra)

12.3 Comprobación / ajuste de los switches
Los ajustes en la pletina lógica se realizan en fábrica, de acuerdo con lasinstrucciones del pedido.La pletina lógica se encuentra debajo de la tarjeta PROFIBUS-DP.
El tipo de desconexión en posición final CERRADO debe serel mismo en la tarjeta PROFIBUS-DP (switch S4, figura H,página 32) y en la pletina lógica (switch S1-2).
36
Actuadores eléctricos multi-vueltas y 1/4 de vueltaoicivres ed senoiccurtsnIPD-SUBIFORP ecafretni noc CITAM AMUA nóisrev ne
S3-2S2-2
S1-2Posición 1:por final de carreraen posición finalCERRADO
S1-2
Posición 2:por paren posición finalCERRADO
S1-2
S3-2 Desconexión en pos.final ABIERTOsiempre por final de carrera.La posición de este switches ignorada por PROFIBUS-DP
(AUF)
(ZU)
Figura J: Pletina lógica
Switch S2-2 Programación(ON = presionado)
Sentido CERRAR Sentido ABRIR
Auto-retención REMOTO
Contacto mantenido REMOTO
Auto-retención LOCAL
Contacto mantenido LOCAL
activado desactivado
Intermitente
incluido no incluidoLimitador de par actuado antes deposición final incluido en señalcolectiva de fallo
ON1 2 3 4 5 6
OFFON
1 2 3 4 5 6OFF
ON1 2 3 4 5 6
OFFON
1 2 3 4 5 6OFF
ON1 2 3 4 5 6
OFFON
1 2 3 4 5 6OFF
ON1 2 3 4 5 6
OFFON
1 2 3 4 5 6OFF
EL BLINKER TIENE QUE ESTAR DESACTIVADO
ON1 2 3 4 5 6
OFF
ON1 2 3 4 5 6
OFFON
1 2 3 4 5 6OFF

13. Solución de problemas y acciones correctoras
13.1 Señales ópticas durante la operación
LED ‘SYSTEM OK’ (V1) Este LED muestra si la tensión de alimentación a la tarjeta PROFIBUS-DPes correcta.
luce continuamente: Tensión disponible en tarjeta PROFIBUS-DPparpadea: No hay Eprom o Eprom defectuosano luce: Sin tensión en tarjeta PROFIBUS-DP
LED (V2) Este LED indica una orden de maniobra en sentido ABRIR.
luce continuamente: Orden de maniobra ABRIR ejecutándoseno luce: No existe orden de maniobra ABRIR
LED (V3) Este LED indica una orden de maniobra en sentido CERRAR.
luce continuamente: Orden de maniobra CERRAR ejecutándoseno luce: No existe orden de maniobra CERRAR
LED ‘LocErr’ (V5) Este LED indica fallos locales en el actuador.Un fallo con alta frecuencia de parpadeo es más grave que uno con menorfrecuencia.
parpadea 1 vez: Fallo térmico, el actuador se ha detenidopor sobrecalentamiento del motor
parpadea 2 veces: Fallo de alimentación (fallo eléctrico),fallo de fase
parpadea 3 veces: Fallo DÖL (lim. par apertura, izda.)Par inesperado en sentido ABRIR
parpadea 4 veces: Fallo DSR (lim. par cierre, dcha.)Par inesperado en sentido CERRAR
parpadea 5 veces: Fallo tensión alimentación (24V)Tensión en tarjeta PROFIBUS-DP>30 V o <18 V
parpadea 6 veces: esclavo en estado CLEAR
37
Actuadores eléctricos multi-vueltas y 1/4 de vueltaInstrucciones de servicio en versión AUMA MATIC con interface PROFIBUS-DP
V1 V2 V3 V4 V8 V7 V6 V5
S1.1S1.2
1 2 3 4 5 6 1 2 3 4 5 6 1 2 3 4
1 2
3 4
5 6
1 2
X8 PROFIBUS X11 AI 3/4 X10 AI 1
X1
2A
I2
X7
RE
SE
RV
E
Figura K: Tarjeta PROFIBUS-DP

LED ‘Data Ex’ (V8) Si luce este LED, la tarjeta PROFIBUS-DP ha entrado en estado‘Data Exchange’. El actuador sólo puede comunicar con el maestro si estáen este estado.
LED ‘State’ (V7) luce o no luce: Tarjeta PROFIBUS-DP no está listaparpadea 1 vez: Ejecutándose programa en la tarjeta PROFIBUS-DPparpadea 2 veces: Actuador en modo de seguridad
El parpadeo regular de este LED indica una operación correcta en la tarjetaPROFIBUS-DP.
LED ‘BusErr’ (V6) Este LED indica fallos relacionados con el bus.Un fallo con alta frecuencia de parpadeo es más grave que uno con menorfrecuencia, la iluminación continua cubre todas las señales parpadeantes.
luce continuamente: Dirección inválida (>125) establecidaparpadea 1 vez: Sin tasa de transferencia en el busparpadea 2 veces: Datos de parámetros incorrectosparpadea 3 veces: Datos de configuración incorrectos
38
Actuadores eléctricos multi-vueltas y 1/4 de vueltaen versión AUMA MATIC con interface PROFIBUS-DP Instrucciones de servicio
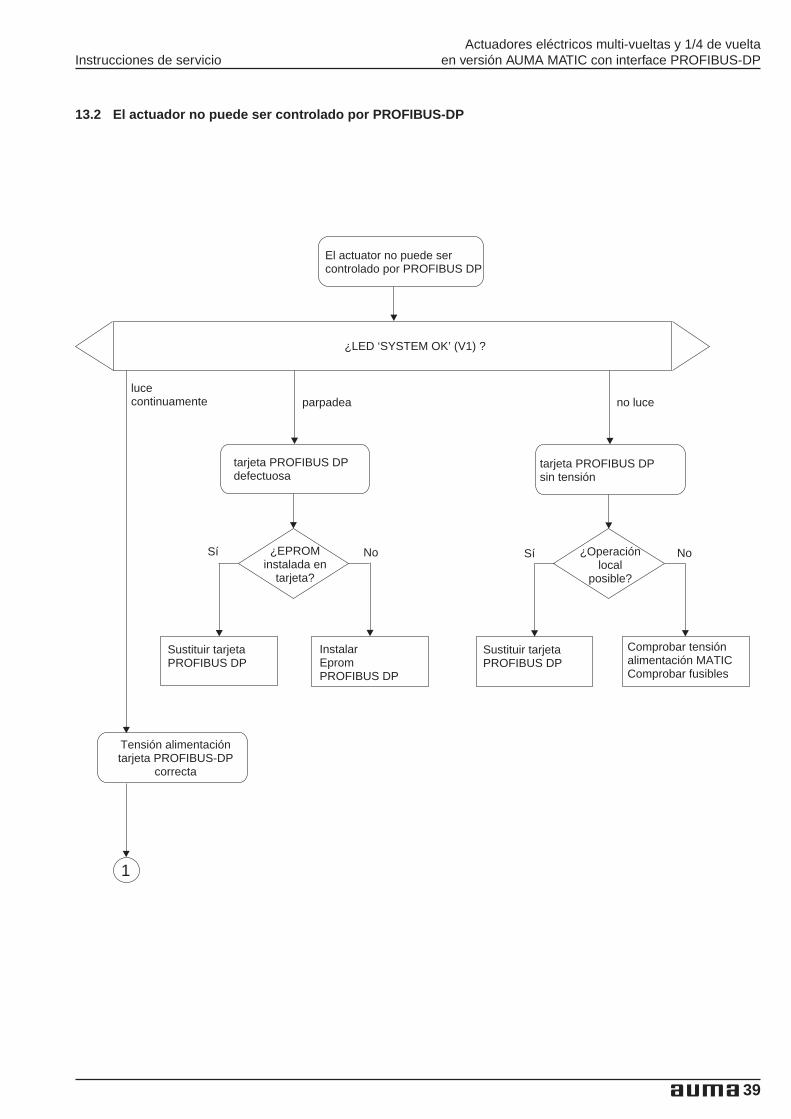
13.2 El actuador no puede ser controlado por PROFIBUS-DP
39
Actuadores eléctricos multi-vueltas y 1/4 de vueltaInstrucciones de servicio en versión AUMA MATIC con interface PROFIBUS-DP
¿LED ‘SYSTEM OK’ (V1) ?
¿Operaciónlocal
posible?
Tensión alimentacióntarjeta PROFIBUS-DP
correcta
El actuator no puede sercontrolado por PROFIBUS DP
¿EPROMinstalada en
tarjeta?
tarjeta PROFIBUS DPdefectuosa
Sustituir tarjetaPROFIBUS DP
InstalarEpromPROFIBUS DP
tarjeta PROFIBUS DPsin tensión
Sustituir tarjetaPROFIBUS DP
Comprobar tensiónalimentación MATICComprobar fusibles
lucecontinuamente parpadea no luce
Sí No Sí No
1

40
Actuadores eléctricos multi-vueltas y 1/4 de vueltaen versión AUMA MATIC con interface PROFIBUS-DP Instrucciones de servicio
Tensión alimentacióntarjeta PROFIBUS DP
correcta
Esclavo PROFIBUS DPno en modo
Data Exchange
ComunicaciónPROFIBUS DP
correcta
No hay tasade transferencia
- Comprobar maestro- Comprobar cableado- Compr. conexión bus
Maestro funciona sóloen nivel 2. No intentaprogramar o configurar
¿LED ’Bus Err’ (V6) ?
Comprobarmaestro PROFIBUS DP
Sí No
parpadea1 vez
no luce
Datos configuraciónincorrectos.Configuracióncorrecta en maestro
parpadea3 veces
Datos parámetrosincorrectos.Parámetro correctoen maestro
parpadea2 veces
1
2
Direcciónesclavo > 125
lucecontinuamente
¿LuceLED ‘DataEx’
(V8)?

41
Actuadores eléctricos multi-vueltas y 1/4 de vueltaInstrucciones de servicio en versión AUMA MATIC con interface PROFIBUS-DP
¿LED‘State’ (V7)?
parpadea 1 vez parpadea 2 veces
ComunicaciónPROFIBUS DP
correcta
Fallo térmico:Sobrecal. motor
¿LED ‘LocErr’ (V5)?
parpadea1 vez
noluce
parpadea3 veces
parpadea2 veces
TarjetaPROFIBUS-DP no
indica fallo
Fallo alimenta-ción, sobretensión
Fallo DÖL:lim. parABRIR
Comprobar cone-xión red
.
Comprobar ten-sión. Quizá susti-tuir fuente dealimentación
Eliminar causadel fallo de par
Dejar enfriar elmotor. Eliminarcausa sobreca-lentamiento
Tensión <18Vó >30V
Fallo DSR:lim. par
CERRAR
parpadea4 veces
parpadea5 veces
Eliminar causadel fallo de par
¿Operaciónlocal posible?
Sí No
Comprobarpletina lógicacontrol motormotor
¿LEDó
lucen?
Maestro no daorden demaniobra
Comprobarprogramación delcontrol
Comprobar tarjetaPROFIBUS DPComprobar pletinalógica
Sí No
2
Esclavo en modode seguridad 1)
Comprobar todos los esclavosen PROFIBUS. Si fuera nece-sario, desactivar funciónAutoclear en maestro
Esclavo enestado CLEAR
parpadea6 veces
1) ver ajuste de parámetros 6, 7, 8, 9 y 10 (páginas 17/18)

13.3 La señal de posición no funciona.Comprobar si la tensión en el conector (X10 AI1) de la tarjetaPROFIBUS-DP, pin 3 (-) y pin 2 (+) crece linealmente en sentido ABRIR, ydecrece linealmente en sentido CERRAR.El valor para la posición CERRADO debería estar en el rango 0 a 2 V. Elvalor para la posición ABIERTO debería estar en el rango 3 a 5 V. Ladiferencia de tensión entre CERRADO y ABIERTO debería estar porencima de 3 V.
13.4 El actuador no es desconectado por el final de carrera en posición CERRADOEl actuador está ajustado para desconectar por par.Ajustar el actuador para desconexión por final de carrera..Poner switch S4 (ver figura H, página 32 ) en la tarjeta PROFIBUS-DP
en posición ‘LIMIT’..Poner switch S1-2 en la pletina lógica (ver página 36) en posición 1.
13.5 El actuador se detiene inmediatamente después del arranque.Poner switch S2-2 (intermitente) en la pletina lógica en posición ‘ON’.
13.6 Medición de las señales PROFIBUS con un osciloscopioEn la tarjeta PROFIBUS-DP, se puede comprobar con un osciloscopiodigital la señal del canal 1 en el conector (X8 PROFIBUS) pin 1 (A/N) y pin2 (B/P).La tensión entre pin 1 (+) y pin 2 (-) debe ser positiva y en el rango0,8 V - 1,4 V.
Ejemplo de una señal PROFIBUS correcta:
Ejemplo de una señal PROFIBUS incorrecta(bus conectado sólo en un lado):
42
Actuadores eléctricos multi-vueltas y 1/4 de vueltaen versión AUMA MATIC con interface PROFIBUS-DP Instrucciones de servicio
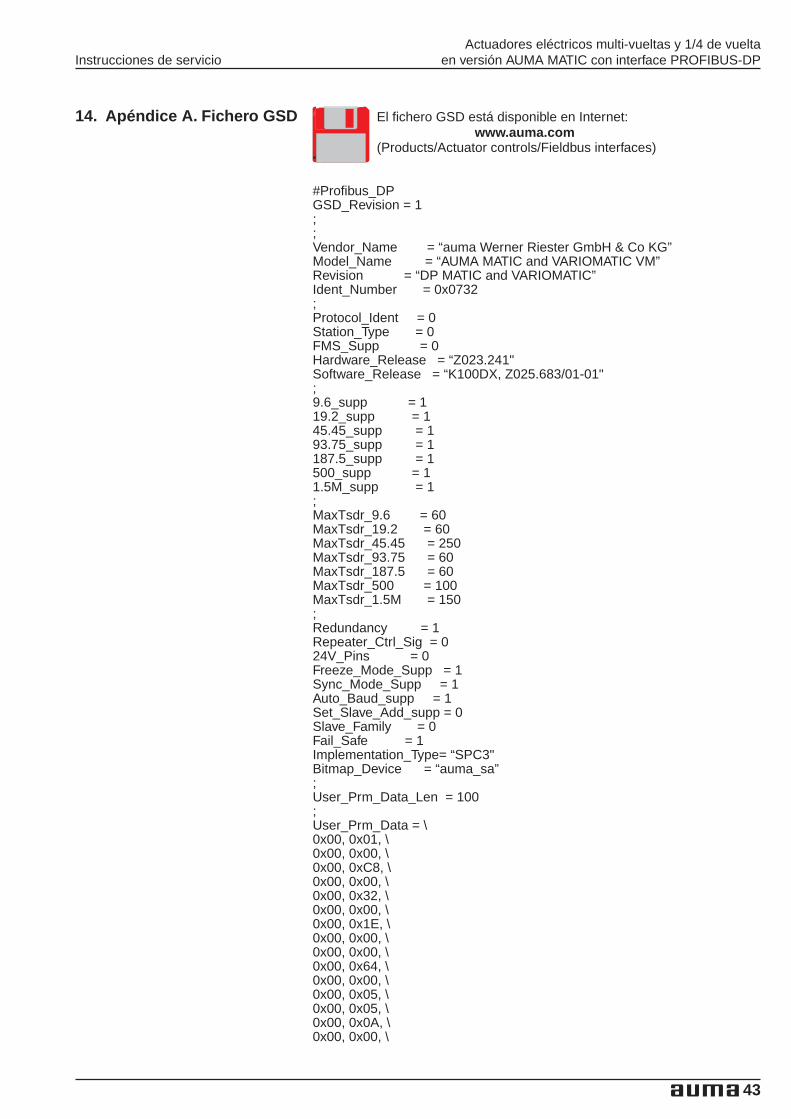
14. Apéndice A. Fichero GSD El fichero GSD está disponible en Internet:www.auma.com
(Products/Actuator controls/Fieldbus interfaces)
#Profibus_DPGSD_Revision = 1;;Vendor_Name = “auma Werner Riester GmbH & Co KG”Model_Name = “AUMA MATIC and VARIOMATIC VM”Revision = “DP MATIC and VARIOMATIC”Ident_Number = 0x0732;Protocol_Ident = 0Station_Type = 0FMS_Supp = 0Hardware_Release = “Z023.241"Software_Release = “K100DX, Z025.683/01-01";9.6_supp = 119.2_supp = 145.45_supp = 193.75_supp = 1187.5_supp = 1500_supp = 11.5M_supp = 1;MaxTsdr_9.6 = 60MaxTsdr_19.2 = 60MaxTsdr_45.45 = 250MaxTsdr_93.75 = 60MaxTsdr_187.5 = 60MaxTsdr_500 = 100MaxTsdr_1.5M = 150;Redundancy = 1Repeater_Ctrl_Sig = 024V_Pins = 0Freeze_Mode_Supp = 1Sync_Mode_Supp = 1Auto_Baud_supp = 1Set_Slave_Add_supp = 0Slave_Family = 0Fail_Safe = 1Implementation_Type= “SPC3"Bitmap_Device = “auma_sa”;User_Prm_Data_Len = 100;User_Prm_Data = \0x00, 0x01, \0x00, 0x00, \0x00, 0xC8, \0x00, 0x00, \0x00, 0x32, \0x00, 0x00, \0x00, 0x1E, \0x00, 0x00, \0x00, 0x00, \0x00, 0x64, \0x00, 0x00, \0x00, 0x05, \0x00, 0x05, \0x00, 0x0A, \0x00, 0x00, \
43
Actuadores eléctricos multi-vueltas y 1/4 de vueltaInstrucciones de servicio en versión AUMA MATIC con interface PROFIBUS-DP

0x00, 0x64, \0x00, 0x00, \0x00, 0x28, \0x00, 0x32, \0x00, 0x00, \0x00, 0xC8, \0x00, 0x00, \0x00, 0x00, \0x00, 0xC8, \0x00, 0x00, \0x00, 0x00, \0x00, 0x0A, \0x00, 0x32, \0x00, 0x00, \0x03, 0xE8, \0x00, 0x00, \0x00, 0x0A, \0x00, 0x32, \0x03, 0xE8, \0x00, 0x00, \0x00, 0x00, \0x00, 0x00, \0x00, 0x00, \0x00, 0x00, \0x00, 0x00, \0x00, 0x00, \0x00, 0x00, \0x00, 0x00, \0x00, 0x00, \0x00, 0x00, \0x00, 0x00, \0x00, 0x00, \0x00, 0x00, \0x00, 0x00, \0x00, 0x00;;Min_Slave_Intervall = 1Modular_Station = 1Max_Module = 1Max_Input_Len = 20Max_Output_Len = 12Max_Data_Len = 32Max_Diag_Data_Len = 6;Module = “1 Byte Input, 1 Byte Output” 0x10, 0x20EndModule;Module = “4 Byte In, 4 Byte Out,consistent” 0x93, 0xA3EndModule;Module = “8 Byte In, 4 Byte Out,consistent” 0x97, 0xA3EndModule;Module = “12 Byte In,4 Byte Out,consistent” 0x9B, 0xA3EndModule;Module = “16 Byte In,8 Byte Out,consistent” 0x9F, 0xA7EndModule;Module = “16 Byte In, 8 Byte Out” 0x1F, 0x27EndModule;; Here the new configuration start, which only work; for Eprom version Z025.683/01-01 and later.; The following configurations DO NOT work; with the Eprom version K10000x.DX.000!
44
Actuadores eléctricos multi-vueltas y 1/4 de vueltaen versión AUMA MATIC con interface PROFIBUS-DP Instrucciones de servicio
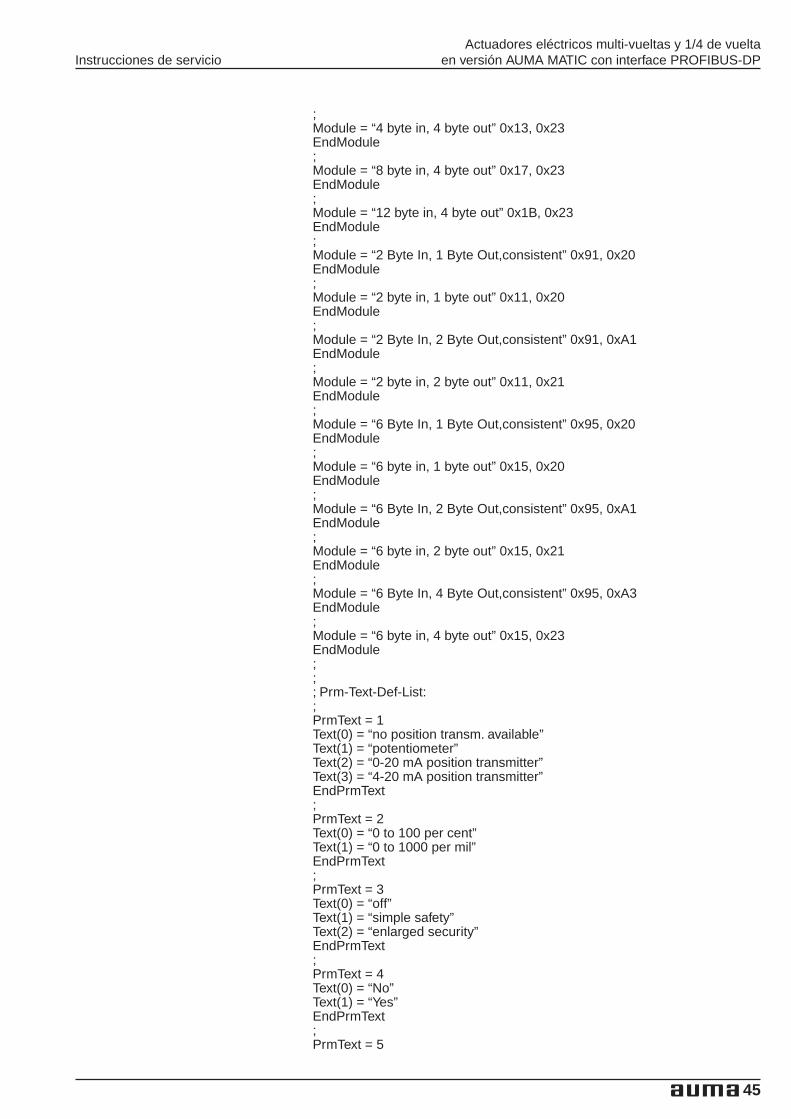
;Module = “4 byte in, 4 byte out” 0x13, 0x23EndModule;Module = “8 byte in, 4 byte out” 0x17, 0x23EndModule;Module = “12 byte in, 4 byte out” 0x1B, 0x23EndModule;Module = “2 Byte In, 1 Byte Out,consistent” 0x91, 0x20EndModule;Module = “2 byte in, 1 byte out” 0x11, 0x20EndModule;Module = “2 Byte In, 2 Byte Out,consistent” 0x91, 0xA1EndModule;Module = “2 byte in, 2 byte out” 0x11, 0x21EndModule;Module = “6 Byte In, 1 Byte Out,consistent” 0x95, 0x20EndModule;Module = “6 byte in, 1 byte out” 0x15, 0x20EndModule;Module = “6 Byte In, 2 Byte Out,consistent” 0x95, 0xA1EndModule;Module = “6 byte in, 2 byte out” 0x15, 0x21EndModule;Module = “6 Byte In, 4 Byte Out,consistent” 0x95, 0xA3EndModule;Module = “6 byte in, 4 byte out” 0x15, 0x23EndModule;;; Prm-Text-Def-List:;PrmText = 1Text(0) = “no position transm. available”Text(1) = “potentiometer”Text(2) = “0-20 mA position transmitter”Text(3) = “4-20 mA position transmitter”EndPrmText;PrmText = 2Text(0) = “0 to 100 per cent”Text(1) = “0 to 1000 per mil”EndPrmText;PrmText = 3Text(0) = “off”Text(1) = “simple safety”Text(2) = “enlarged security”EndPrmText;PrmText = 4Text(0) = “No”Text(1) = “Yes”EndPrmText;PrmText = 5
45
Actuadores eléctricos multi-vueltas y 1/4 de vueltaInstrucciones de servicio en versión AUMA MATIC con interface PROFIBUS-DP

Text(0) = “actuator stops”Text(1) = “actuator running Close”Text(2) = “actuator running Open”Text(3) = “actuator running to nominal position”EndPrmText;PrmText = 6Text(0) = “0 to 100 percent”Text(1) = “0 to 1000 per mil”Text(2) = “0 to 1023 raw value A/D converter”EndPrmText;; Ext-User-Prm-Data-Def-List:;; User_Prm_Data_Definition 1ExtUserPrmData = 1 “position transmitter”Unsigned16 1 0-3Prm_Text_Ref = 1EndExtUserPrmData;; User_Prm_Data_Definition 2ExtUserPrmData = 2 “data code position transmitter”Unsigned16 0 0-1Prm_Text_Ref = 2EndExtUserPrmData;; User_Prm_Data_Definition 3ExtUserPrmData = 3 “ reversing prevention in ms”Unsigned16 200 100-1000EndExtUserPrmData;; User_Prm_Data_Definition 4ExtUserPrmData = 4 “redundancy”Unsigned16 0 0-1Prm_Text_Ref = 4EndExtUserPrmData;; User_Prm_Data_Definition 5ExtUserPrmData = 5 ‘time for channel changing in 0.1 s’:Unsigned16 50 50-6000EndExtUserPrmData;; User_Prm_Data_Definition 6ExtUserPrmData = 6 “safety behaviour”Unsigned16 0 0-2Prm_Text_Ref = 3EndExtUserPrmData;; User_Prm_Data_Definition 7ExtUserPrmData = 7 “time of initiation safety operation 0.1 s”:Unsigned16 30 0-12000EndExtUserPrmData;; User_Prm_Data_Definition 8ExtUserPrmData = 8 “safety behaviour”Unsigned16 0 0-3Prm_Text_Ref = 5EndExtUserPrmData;; User_Prm_Data_Definition 9ExtUserPrmData = 9 “safety position in per mil”Unsigned16 0 0-1000EndExtUserPrmData;; User_Prm_Data_Definition 10ExtUserPrmData = 10 “output speed safety operation percentage”Unsigned16 100 0-100
46
Actuadores eléctricos multi-vueltas y 1/4 de vueltaen versión AUMA MATIC con interface PROFIBUS-DP Instrucciones de servicio

EndExtUserPrmData;; User_Prm_Data_Definition 11ExtUserPrmData = 11 “dead time positioner in 0.1 s”:Unsigned16 0 0-600EndExtUserPrmData;; User_Prm_Data_Definition 12ExtUserPrmData = 12 “overrun dir. OPEN in per mil”:Unsigned16 5 0-99EndExtUserPrmData;; User_Prm_Data_Definition 13ExtUserPrmData = 13 “overrun dir. CLOSE in per mil”:Unsigned16 5 0-99EndExtUserPrmData;; User_Prm_Data_Definition 14ExtUserPrmData = 14 “max. error in per mil”Unsigned16 10 1-100EndExtUserPrmData;; User_Prm_Data_Definition 15ExtUserPrmData = 15 “proportional operation active”Unsigned16 0 0-1Prm_Text_Ref = 4EndExtUserPrmData;; User_Prm_Data_Definition 16ExtUserPrmData = 16 “proport. range stop in per mil”Unsigned16 100 0-1000EndExtUserPrmData;; User_Prm_Data_Definition 17ExtUserPrmData = 17 “stop speed in percent”Unsigned16 0 0-100EndExtUserPrmData;; User_Prm_Data_Definition 18ExtUserPrmData = 18 “proport. range stop in per mil”Unsigned16 40 0-1000EndExtUserPrmData;; User_Prm_Data_Definition 19ExtUserPrmData = 19 “starting speed in percent”Unsigned16 50 0-100EndExtUserPrmData;; User_Prm_Data_Definition 20ExtUserPrmData = 20 “start analogue 2 in 0.1 mA”:Unsigned16 0 0-150EndExtUserPrmData;; User_Prm_Data_Definition 21ExtUserPrmData = 21 “end analogue 2 in 0.1 mA”:Unsigned16 200 50-200EndExtUserPrmData;; User_Prm_Data_Definition 22ExtUserPrmData = “code analogue 2"Unsigned16 0 0-2Prm_Text_Ref = 6EndExtUserPrmData;; User_Prm_Data_Definition 23ExtUserPrmData = 23 “start analogue 3/4 in 0.1 mA”:Unsigned16 0 0-150
47
Actuadores eléctricos multi-vueltas y 1/4 de vueltaInstrucciones de servicio en versión AUMA MATIC con interface PROFIBUS-DP

EndExtUserPrmData;; User_Prm_Data_Definition 24ExtUserPrmData = 24 “start analogue 3/4 in 0.1 mA”:Unsigned16 200 50-200EndExtUserPrmData;; User_Prm_Data_Definition 25ExtUserPrmData = “code analogue 3/4"Unsigned16 0 0-2Prm_Text_Ref = 6EndExtUserPrmData;; User_Prm_Data_Definition 26ExtUserPrmData = 26 ‘stepping direction OPEN active’:Unsigned16 0 0-1Prm_Text_Ref = 4EndExtUserPrmData;; User_Prm_Data_Definition 27ExtUserPrmData = 27 “step. operat. time OPEN in 0.1 s”:Unsigned16 10 1-36000EndExtUserPrmData;; User_Prm_Data_Definition 28ExtUserPrmData = 28 “stepping pause time OPEN in 0.1 s”:Unsigned16 50 1-36000EndExtUserPrmData;; User_Prm_Data_Definition 29ExtUserPrmData = 29 ‘stepping start OPEN in per mil’Unsigned16 0 0-999EndExtUserPrmData;; User_Prm_Data_Definition 30ExtUserPrmData = 30 ‘stepping end OPEN in per mil’Unsigned16 1000 1-1000EndExtUserPrmData;; User_Prm_Data_Definition 31ExtUserPrmData = 31 ‘stepping direction CLOSE active’:Unsigned16 0 0-1Prm_Text_Ref = 4EndExtUserPrmData;; User_Prm_Data_Definition 32ExtUserPrmData = 32 “stepping operating time CLOSE in 0.1 s”:Unsigned16 10 1-36000EndExtUserPrmData;; User_Prm_Data_Definition 33ExtUserPrmData = 33 “stepping pause time CLOSE in 0.1 s”:Unsigned16 50 1-36000EndExtUserPrmData;; User_Prm_Data_Definition 34ExtUserPrmData = 34 ‘stepping start CLOSE in per mil’Unsigned16 1000 1-1000EndExtUserPrmData;; User_Prm_Data_Definition 35ExtUserPrmData = 35 ‘stepping end CLOSE in per mil’Unsigned16 0 0-999EndExtUserPrmData;; User_Prm_Data_Definition 36ExtUserPrmData = 36 “spare parameters”
48
Actuadores eléctricos multi-vueltas y 1/4 de vueltaen versión AUMA MATIC con interface PROFIBUS-DP Instrucciones de servicio

Unsigned16 0 0-65535EndExtUserPrmData;; User_Prm_Data_Definition 37ExtUserPrmData = 37 “spare parameters”Unsigned16 0 0-65535EndExtUserPrmData;; User_Prm_Data_Definition 38ExtUserPrmData = 38 “spare parameters”Unsigned16 0 0-65535EndExtUserPrmData;; User_Prm_Data_Definition 39ExtUserPrmData = 39 “spare parameters”Unsigned16 0 0-65535EndExtUserPrmData;; User_Prm_Data_Definition 40ExtUserPrmData = 40 “spare parameters”Unsigned16 0 0-65535EndExtUserPrmData;; User_Prm_Data_Definition 41ExtUserPrmData = 41 “spare parameters”Unsigned16 0 0-65535EndExtUserPrmData;; User_Prm_Data_Definition 42ExtUserPrmData = 42 “spare parameters”Unsigned16 0 0-65535EndExtUserPrmData;; User_Prm_Data_Definition 43ExtUserPrmData = 43 “spare parameters”Unsigned16 0 0-65535EndExtUserPrmData;; User_Prm_Data_Definition 44ExtUserPrmData = 44 “spare parameters”Unsigned16 0 0-65535EndExtUserPrmData;; User_Prm_Data_Definition 45ExtUserPrmData = 45 “spare parameters”Unsigned16 0 0-65535EndExtUserPrmData;; User_Prm_Data_Definition 46ExtUserPrmData = 46 “spare parameters”Unsigned16 0 0-65535EndExtUserPrmData;; User_Prm_Data_Definition 47ExtUserPrmData = 47 “spare parameters”Unsigned16 0 0-65535EndExtUserPrmData;; User_Prm_Data_Definition 48ExtUserPrmData = 48 “spare parameters”Unsigned16 0 0-65535EndExtUserPrmData;; User_Prm_Data_Definition 49ExtUserPrmData = 49 “spare parameters”Unsigned16 0 0-65535EndExtUserPrmData
49
Actuadores eléctricos multi-vueltas y 1/4 de vueltaInstrucciones de servicio en versión AUMA MATIC con interface PROFIBUS-DP

;; User_Prm_Data_Definition 50ExtUserPrmData = 50 “spare parameters”Unsigned16 0 0-65535EndExtUserPrmData;Max_User_Prm_Data_Len = 100;Ext_User_Prm_Data_Ref(0) = 1Ext_User_Prm_Data_Ref(2) = 2Ext_User_Prm_Data_Ref(4) = 3Ext_User_Prm_Data_Ref(6) = 4Ext_User_Prm_Data_Ref(8) = 5Ext_User_Prm_Data_Ref(10) = 6Ext_User_Prm_Data_Ref(12) = 7Ext_User_Prm_Data_Ref(14) = 8Ext_User_Prm_Data_Ref(16) = 9Ext_User_Prm_Data_Ref(18) = 10Ext_User_Prm_Data_Ref(20) = 11Ext_User_Prm_Data_Ref(22) = 12Ext_User_Prm_Data_Ref(24) = 13Ext_User_Prm_Data_Ref(26) = 14Ext_User_Prm_Data_Ref(28) = 15Ext_User_Prm_Data_Ref(30) = 16Ext_User_Prm_Data_Ref(32) = 17Ext_User_Prm_Data_Ref(34) = 18Ext_User_Prm_Data_Ref(36) = 19Ext_User_Prm_Data_Ref(38) = 20Ext_User_Prm_Data_Ref(40) = 21Ext_User_Prm_Data_Ref(42) = 22Ext_User_Prm_Data_Ref(44) = 23Ext_User_Prm_Data_Ref(46) = 24Ext_User_Prm_Data_Ref(48) = 25Ext_User_Prm_Data_Ref(50) = 26Ext_User_Prm_Data_Ref(52) = 27Ext_User_Prm_Data_Ref(54) = 28Ext_User_Prm_Data_Ref(56) = 29Ext_User_Prm_Data_Ref(58) = 30Ext_User_Prm_Data_Ref(60) = 31Ext_User_Prm_Data_Ref(62) = 32Ext_User_Prm_Data_Ref(64) = 33Ext_User_Prm_Data_Ref(66) = 34Ext_User_Prm_Data_Ref(68) = 35Ext_User_Prm_Data_Ref(70) = 36Ext_User_Prm_Data_Ref(72) = 37Ext_User_Prm_Data_Ref(74) = 38Ext_User_Prm_Data_Ref(76) = 39Ext_User_Prm_Data_Ref(78) = 40Ext_User_Prm_Data_Ref(80) = 41Ext_User_Prm_Data_Ref(82) = 42Ext_User_Prm_Data_Ref(84) = 43Ext_User_Prm_Data_Ref(86) = 44Ext_User_Prm_Data_Ref(88) = 45Ext_User_Prm_Data_Ref(90) = 46Ext_User_Prm_Data_Ref(92) = 47Ext_User_Prm_Data_Ref(94) = 48Ext_User_Prm_Data_Ref(96) = 49Ext_User_Prm_Data_Ref(98) = 50
50
Actuadores eléctricos multi-vueltas y 1/4 de vueltaen versión AUMA MATIC con interface PROFIBUS-DP Instrucciones de servicio

15. Apéndice B. Propuesta de cableado
Las entradas y salidas digitales son opcionales.
Las dos entradas analógicas (AI 3/4 und AI 2) y las cuatro entradasdigitales del cliente (Dig 1 ... 4) sólo se suministran (cablean) de fábrica sise piden expresamente.El 5º dígito del número MSP (ver placa de características) indica si lasconexiones están disponibles.Si el 5º dígito es ‘0’, no hay conexiones externas disponibles.Si el 5º dígito es ‘L’, las conexiones externas están disponibles.
51
Actuadores eléctricos multi-vueltas y 1/4 de vueltaInstrucciones de servicio en versión AUMA MATIC con interface PROFIBUS-DP
Conexión de sensores externos, tecnología de 2 hilos

52
Actuadores eléctricos multi-vueltas y 1/4 de vueltaen versión AUMA MATIC con interface PROFIBUS-DP Instrucciones de servicio
Conexión de sensores externos, tecnología de 3 hilos

53
Actuadores eléctricos multi-vueltas y 1/4 de vueltaInstrucciones de servicio en versión AUMA MATIC con interface PROFIBUS-DP
Conexión de sensores externos, tecnología de 4 hilos

16. Apéndice C. Diagrama de cableado
54
Actuadores eléctricos multi-vueltas y 1/4 de vueltaen versión AUMA MATIC con interface PROFIBUS-DP Instrucciones de servicio
Diagrama de cableado estándar AUMA MATIC PROFIBUS-DP
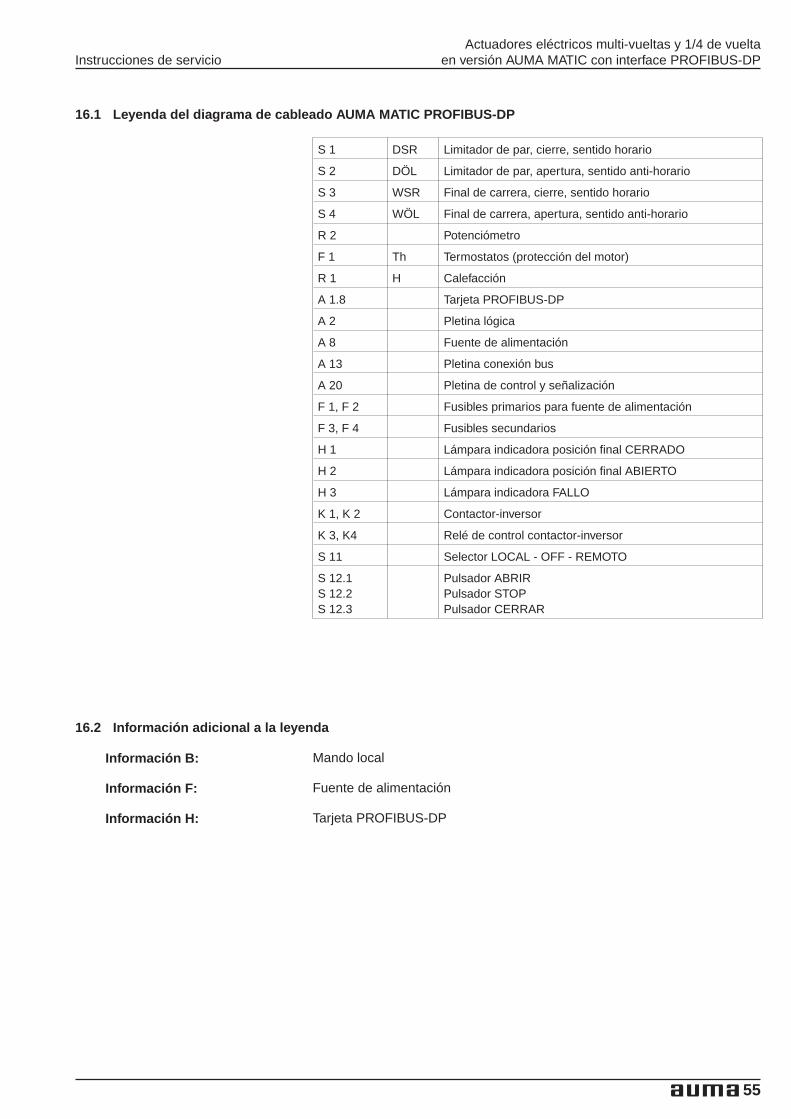
16.1 Leyenda del diagrama de cableado AUMA MATIC PROFIBUS-DP
16.2 Información adicional a la leyenda
Información B: Mando local
Información F: Fuente de alimentación
Información H: Tarjeta PROFIBUS-DP
55
Actuadores eléctricos multi-vueltas y 1/4 de vueltaInstrucciones de servicio en versión AUMA MATIC con interface PROFIBUS-DP
S 1 DSR Limitador de par, cierre, sentido horario
S 2 DÖL Limitador de par, apertura, sentido anti-horario
S 3 WSR Final de carrera, cierre, sentido horario
S 4 WÖL Final de carrera, apertura, sentido anti-horario
R 2 Potenciómetro
F 1 Th Termostatos (protección del motor)
R 1 H Calefacción
A 1.8 Tarjeta PROFIBUS-DP
A 2 Pletina lógica
A 8 Fuente de alimentación
A 13 Pletina conexión bus
A 20 Pletina de control y señalización
F 1, F 2 Fusibles primarios para fuente de alimentación
F 3, F 4 Fusibles secundarios
H 1 Lámpara indicadora posición final CERRADO
H 2 Lámpara indicadora posición final ABIERTO
H 3 Lámpara indicadora FALLO
K 1, K 2 Contactor-inversor
K 3, K4 Relé de control contactor-inversor
S 11 Selector LOCAL - OFF - REMOTO
S 12.1S 12.2S 12.3
Pulsador ABRIRPulsador STOPPulsador CERRAR

17. Apéndice L. Literatura
1. Como introducción a PROFIBUS-DP:Manfred Popp: PROFIBUS-DP, Grundlagen, Tips und Tricks für Anwender.Hüthig Verlag, ISBN 3-7785-2676-6
2. Consejos para el instalador eléctrico:Installation guide PROFIBUS-DP/FMS order no. 2.111Disponible en:PROFIBUS Nutzerorganisation Haid-und-Neu-Str.7D - 76131 KarlsruheTel. +49 721 / 96 58 590Tel +49 721 / 96 58 589Http:/ www.profibus.com
56
Actuadores eléctricos multi-vueltas y 1/4 de vueltaen versión AUMA MATIC con interface PROFIBUS-DP Instrucciones de servicio

18. Apéndice E. Certificado PNO
57
Actuadores eléctricos multi-vueltas y 1/4 de vueltaInstrucciones de servicio en versión AUMA MATIC con interface PROFIBUS-DP
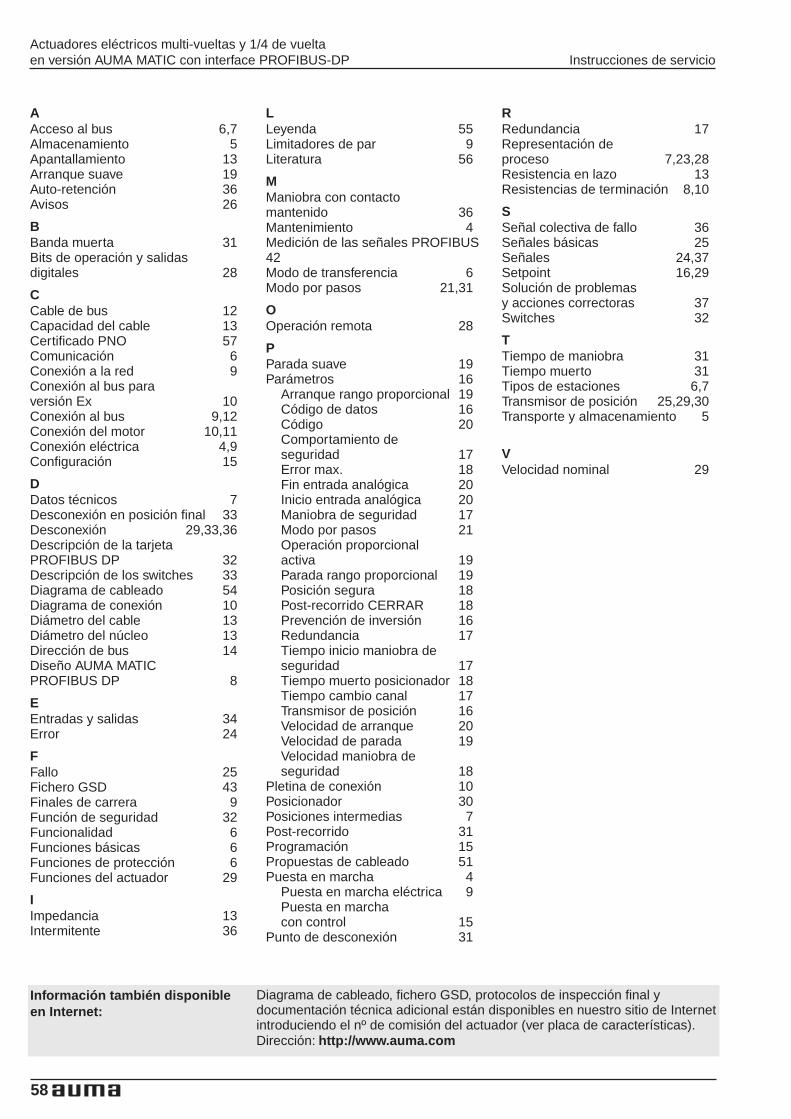
Actuadores eléctricos multi-vueltas y 1/4 de vueltaen versión AUMA MATIC con interface PROFIBUS-DP Instrucciones de servicio
58
Información también disponibleen Internet:
Diagrama de cableado, fichero GSD, protocolos de inspección final ydocumentación técnica adicional están disponibles en nuestro sitio de Internetintroduciendo el nº de comisión del actuador (ver placa de características).Dirección: http://www.auma.com
AAcceso al bus 6,7Almacenamiento 5Apantallamiento 13Arranque suave 19Auto-retención 36Avisos 26
BBanda muerta 31Bits de operación y salidasdigitales 28
CCable de bus 12Capacidad del cable 13Certificado PNO 57Comunicación 6Conexión a la red 9Conexión al bus paraversión Ex 10Conexión al bus 9,12Conexión del motor 10,11Conexión eléctrica 4,9Configuración 15
DDatos técnicos 7Desconexión en posición final 33Desconexión 29,33,36Descripción de la tarjetaPROFIBUS DP 32Descripción de los switches 33Diagrama de cableado 54Diagrama de conexión 10Diámetro del cable 13Diámetro del núcleo 13Dirección de bus 14Diseño AUMA MATICPROFIBUS DP 8
EEntradas y salidas 34Error 24
FFallo 25Fichero GSD 43Finales de carrera 9Función de seguridad 32Funcionalidad 6Funciones básicas 6Funciones de protección 6Funciones del actuador 29
IImpedancia 13Intermitente 36
LLeyenda 55Limitadores de par 9Literatura 56
MManiobra con contactomantenido 36Mantenimiento 4Medición de las señales PROFIBUS42Modo de transferencia 6Modo por pasos 21,31
OOperación remota 28
PParada suave 19Parámetros 16
Arranque rango proporcional 19Código de datos 16Código 20Comportamiento deseguridad 17Error max. 18Fin entrada analógica 20Inicio entrada analógica 20Maniobra de seguridad 17Modo por pasos 21Operación proporcionalactiva 19Parada rango proporcional 19Posición segura 18Post-recorrido CERRAR 18Prevención de inversión 16Redundancia 17Tiempo inicio maniobra deseguridad 17Tiempo muerto posicionador 18Tiempo cambio canal 17Transmisor de posición 16Velocidad de arranque 20Velocidad de parada 19Velocidad maniobra deseguridad 18
Pletina de conexión 10Posicionador 30Posiciones intermedias 7Post-recorrido 31Programación 15Propuestas de cableado 51Puesta en marcha 4
Puesta en marcha eléctrica 9Puesta en marchacon control 15
Punto de desconexión 31
RRedundancia 17Representación deproceso 7,23,28Resistencia en lazo 13Resistencias de terminación 8,10
SSeñal colectiva de fallo 36Señales básicas 25Señales 24,37Setpoint 16,29Solución de problemasy acciones correctoras 37Switches 32
TTiempo de maniobra 31Tiempo muerto 31Tipos de estaciones 6,7Transmisor de posición 25,29,30Transporte y almacenamiento 5
VVelocidad nominal 29
59
Actuadores eléctricos multi-vueltas y 1/4 de vueltaInstrucciones de servicio en versión AUMA MATIC con interface PROFIBUS-DP
Alemania
WERNER RIESTER GmbH & Co. KGIndustriegebiet WestPostfach 13 62
DE 79373 Müllheim/BadenTel +49 76 31 809-0Fax +49 76 31 809-250e-mail: [email protected]
WERNER RIESTER GmbH & Co. KGPostfach 11 51
DE 73747 OstfildernTel +49 71 13 48 03-0Fax +49 71 13 48 03 34e-mail: [email protected]
WERNER RIESTER GmbH & Co. KGService-Center KölnToyota-Allee 44
DE 50858 KölnTel +49 2234 20379-00Fax +49 2234 20379-99e-mail: [email protected]
WERNER RIESTER GmbH & Co. KGService-Center MagdeburgAm Stadtberg 1
DE 39167 NiederndodelebenTel +49 39 20 47 59-0Fax +49 39 20 47 59-19e-mail: [email protected]
WERNER RIESTER GmbH & Co. KGService-Center BayernRobert-Bosch-Strasse 14
DE 85748 Garching-HochbrückTel 0 89 / 32 98 85-17Fax 0 89 / 32 98 85-18e-mail: [email protected]
WERNER RIESTER GmbH & Co. KGBüro NordKrelingen 150
DE 29664 WalsrodeTel +49 51 67 504Fax +49 51 67 565e-mail: [email protected]
WERNER RIESTER GmbH & Co. KGBüro NordBereich SchiffbauTempowerkring 1
DE 21079 HamburgTel +49 40 79 14 02 85Fax +49 40 79 14 02 86e-mail: [email protected]
WERNER RIESTER GmbH & Co. KGBüro WestRathausplatz 7
DE 45549 SprockhövelTel +49 23 39 92 12-0Fax +49 23 39 92 12 15e-mail: [email protected]
WERNER RIESTER GmbH & Co. KGBüro Süd-WestMozartstr. 4
DE 69488 BirkenauTel +49 62 01 37 31 49Fax +49 62 01 37 31 50e-mail: [email protected]
WERNER RIESTER GmbH & Co. KGBüro BadenPostfach 13 62
DE 79373 Müllheim/BadenTel +49 76 31 809 193Fax +49 76 31 809 294e-mail: [email protected]
WERNER RIESTER GmbH & Co. KGBüro WürttembergPostfach 11 51
D 73747 OstfildernTel +49 71 13 48 03 80Fax +49 71 13 48 03 81e-mail: [email protected]
WERNER RIESTER GmbH & Co. KGBüro BayernKagerberg 12
DE 93356 Teugn/NiederbayernTel +49 94 05 94 10 24Fax +49 94 05 94 10 25e-mail: [email protected]
WERNER RIESTER GmbH & Co. KGBüro OstAm Stadtberg 1
DE 39167 NiederndodelebenTel +49 39 20 47 59 80Fax +49 39 20 47 59 89e-mail: [email protected]
Europa
AUMA ArmaturenantriebeGesellschaft m.b.H.Betriebsgebiet Traiskirchen SüdHandelsstr. 14
AT 2512 TribuswinkelTel +43 22 52 82 540Fax +43 22 52 82 54 050e-mail: [email protected]
AUMA (Schweiz) AGChörrenmattstr. 43
CH 8965 BerikonTel +41 56 64 00 945Fax +41 56 64 00 948e-mail: [email protected]
AUMA Servopohony spol. s.r.o.Kazanská 121
CZ 10200 Praha 10Tel +420 2 72 70 00 56Fax +420 2 72 70 41 25e-mail: [email protected]
AUMA France10 - 16 Rue Constantin PecqueurZ.A.C. Les Châtaigniers III
FR 95157 Taverny CédexTel +33 13 93 27 272Fax +33 13 93 21 755e-mail: [email protected]
OY AUMATOR ABPl 21 / Hyljekuja 5
FI 02271 Espoo 27Tel +358 95 84 022Fax +358 95 84 02 300e-mail: [email protected]
AUMA ACTUATORS Ltd.Britannia Way
GB ClevedonNorth Somerset BS21 6QHTel +44 12 75 87 11 41Fax +44 12 75 87 54 92e-mail: [email protected]
AUMA ITALIANA S.r.l.Via Don Luigi Sturzo, 29
IT 20020 Lainate/MilanoTel +39 02 93 17 911Fax +39 02 93 74 387e-mail: [email protected]
AUMA BENELUX B.V.Le Pooleweg 9
NL 2314 XT LeidenTel +31 71 58 14 040Fax +31 71 58 14 049e-mail: [email protected]
AUMA Polska Sp. zo. o.Ul. Pukowca 15
PL 40-816 KatowiceTel +48 32 25 05 412Fax +48 32 25 05 412e-mail: [email protected]
AUMA Priwody OOO12, 3-y Pavlovsky Pereulok
RU Moscow, 113093Tel: +7 095 236 55 04Fax: +7 095 236 55 04e-mail: [email protected]
GROENBECH & SOENNER A/SScandiagade 25
DK 2450 Copenhagen SVTel +45 33 26 63 00Fax +45 33 26 63 01e-mail: [email protected]
IBEROPLAN S.A.Marques de Hoyos, 10
ES 28027 MadridTel +34 91 37 17 130Fax +34 91 74 27 126e-mail: [email protected]
D.G. Bellos & Co O.E.86, Konstantinoupoleos St.
GR 136 71 Acharnai, AthensTel +30 124 094 86Fax +30 124 094 86e-mail: [email protected]
SIGURD SOERUM A.S.Jongsasveien 3Postboks 85
NO 1301 SandvikaTel +47 67 57 26 00Fax +47 67 57 26 10e-mail: [email protected]
INDUSTRA Comércio deEquipamentos Industrias, Lda.Estrada de Albarraque 5°
PT Centro Empresarial Sintra-EstorilBloco A3-Linh 2710-297 SintraTel +351 2 19 10 95 00Fax +351 2 19 10 95 99e-mail: [email protected]
ERICHS ARMATUR ABTravbanegatan 8Box 91 44
SE 20039 MalmöTel +46 40 31 15 50Fax +46 40 94 55 15e-mail: [email protected]
MEGA Endüstri Kontrol Sistemleri Tic.Ltd. Sti.Cetin Emec Bulvari 6.CAD78.SK. 17/ 18
TR 06460 Övecler - AnkaraTel +90 31 24 78 08 13Fax +90 31 24 78 08 31e-mail: [email protected]
África
AUMA South Africa (Pty) Ltd.P.O.Box 12 83
ZA Springs 1560Tel +27 11 36 32 880Fax +27 11 81 85 248e-mail: [email protected]
A.T.E.C.5, Road No. 101 Maadi
ET Cairo - EgyptTel +20 2 35 99 680Fax +20 2 35 90 681e-mail: [email protected]
Asia
AUMA Middle EastRepresentative OfficeSponsor: Al Ayman IndustrialEquipmentsP.O. Box 26675
AE SharjahTel +971 6 5746250Fax +971 6 5746251e-mail: [email protected]
AUMA Beijing Representative OfficeRoom 602, Yuanchenxin Building12 Yumin Road, MadianChaoyang District
CN 100029 BeijingTel +86 10 62 02 24 91Fax +86 10 62 02 24 97e-mail: [email protected]
AUMA (INDIA) Ltd.Plot No. 39-B, II PhasePeenya Industrial Area
IN Bangalore 560 058Tel +91 80 83 94 655Tlx 08 45 50 63 auma inFax +91 80 83 92 809e-mail: [email protected]
AUMA JAPAN Co., Ltd.596-4 Futago-Cho273-0034 Funabashi-Shi
JP ChibaTel +81 47 30 29 551Fax +81 47 30 29 555e-mail: [email protected]
AUMA ACTUATORS(Singapore) Pte Ltd.32, Ang Mo Kio Industrial Park 2#01 - 02, Sing Industrial Complex
SG Singapore 569510Tel +65 48 18 750Fax +65 48 18 269e-mail:[email protected]
PERFECT CONTROLS Ltd.Suite 202, Block 1,Hofai Commercial Centre218 Sai Lau Kok Road
HK Tsuen Wan, Kowloon, HongkongTel +852 24 93 77 26Fax +852 24 16 37 63e-mail: [email protected]
Dong Woo Valve Control Co., Ltd.24-2, Youi Do-Dong, Yeong DeungPo-Ku
KR P.O.Box 293 Seoul, 150-010Tel +82 2761 6233Fax +82 2761 1278e-mail: [email protected]
AL-ARFAJ Eng. Company W.L.L.P.O. Box 391
KW Salmiyah 22004Tel +965 48 17 448Fax +965 48 17 442e-mail: [email protected]
BEHZAD TradingP.O. Box 11 23Rayyan Road
QA Doha, QatarTel +974 43 32 36Fax +974 43 32 37e-mail: [email protected]
Mustafa Sultan Science & Industry CoLLCP.O. Box 3340
QM RuwiTel +968 602009/6067355Fax +968 6070066e-mail: [email protected]
Sunny Valves and IntertradeCorp. Ltd.232/ 13 Yen-A-Kart Soi 2
TH Yannawa, Bangkok 10120Tel +66 22 40 06 56Fax +66 22 40 10 95e-mail: [email protected]
Top Advance Enterprises Ltd.2nd Fl., No.32, Lane 308, Section 3,Ho-Ping East Road
TW Taipei, Taiwan, R.O.C.Tel +886 2 2733 3530Fax +886 2 2736 5526e-mail: [email protected]
Australia
BARRON GJM Pty.Ltd.P.O.Box 792
AU Artarmon - NSW 1570Tel +61 29 43 61 088Fax +61 29 43 93 413e-mail: [email protected]
América Norte y Sur
AUMA ACTUATORS INC.4 Zesta Drive
US Pittsburgh, PA 15 205Tel +1 41 27 87 13 40Fax +1 41 27 87 12 23e-mail: [email protected]
Asvotec Termoindustrial Ltda.Rod. Cônego Cyriaco Scaranello Pires,Km 01
BR Monte Mor-Sp, CEP 13190-000Tel: +55 19 3879-87 35Fax: +55 19 3879 87 38e-mail: [email protected]
TROY-ONTOR Inc.230 Bayview Drive Unit 1A
CA Barrie, Ontario L4N 5E9Tel +1 705 721 5851Fax +1 705 721 5851e-mail: [email protected]
Ferrostaal de Colombia Ltd.Avenida Eldorado No. 97-03Apartado Aéreo: 7384CO- Santafé de Bogotá, D.C.
CO Tel +57 1 4 011 300Fax +57 1 4 131 806e-mail:[email protected]
IESS de Mexico S.A.AV. Cuitlahuac 1422, Col. Aguilera,Delegacion Atzco.MX-02900 Mexico D.F.
MX Tel +52 55 561701Fax +51 53 563337e-mail: [email protected]
Multi-Valve Latin America S.A.Amàdor Merino Reyna 496, Of. 301PE- San Isidro, Lima 27
PE Tel +51 12 22 13 13Fax +51 12 22 18 80e-mail: [email protected]
PASSCO Inc.36 41 53PR-00936-4153 San Juan
PR Tel +18 09 78 77 20 87 85Fax +18 09 78 77 31 72 77e-mail: [email protected]
LOOP S.A.Chacabuco 580AR-1069 Buenos Aires
AR Tel +54 11 43 31 32 06Fax +54 11 43 31 32 06e-mail: [email protected]
AUMA Representative Office ChileAvenida Larrain 6642 Of. 304La Reina,CL- Santiago de Chile
CL Tel +56 22 77 71 51Fax +56 22 77 84 78Mobil + 56 95 99 85 47e-mail: [email protected]
SublibarcaCentro Comercial Carmen, Avenia LaLimpia Local 1-2 # 85-39VE- Maracaibo, Edo, Zulia
VE Tel +58 261 7 555 667Fax +58 261 7 532 259e-mail: [email protected]

Y000.421/007/es/1.02
Reductores sinfínGS 40.3 – GS 250.3GS 315 – GS 500Par hasta 360 000 Nm
Reductores sinfín con base y palancaGF 50.3 – GF 125.3GF 160 – GF 250Par hasta 32 000 Nm
Actuadores 1/4 de vueltaAS 6 – AS 50Par desde 25 hasta 500 NmTiempo maniobra 90° desde 4 hasta 90 s
Actuadores 1/4 de vueltaSG 05.1 – SG 12.1Par desde 100 hasta 1 200 NmTiempo man.90° desde 4 hasta 180 s
Reductores engranaje cónicoGK 10.2 – GK 40.2Par hasta 16 000 Nm
Actuadores multi-vueltas SA/ SARcon unidad de empuje lineal LEEmpuje desde 4 kN hasta 217 kNCarrera hasta 500 mmVelocidad linealdesde 20 hasta 360 mm/min
Actuadores multi-vueltasSA 07.1 - SA 16.1 / SA 25.1 - SA 48.1Par desde 10 hasta 32 000 NmVelocidad desde 4 hasta 180 rpm
Reductores engranaje rectoGST 10.1 - GST 40.1Par hasta 16 000 Nm
Actuadores multi-vueltas SA/SARcon control integrado AUMATICPar desde 10 hasta 1 000 NmVelocidad desde 4 hasta 180 rpm
e-mail [email protected]://www.auma.com
WERNER RIESTER GmbH & Co. KGArmaturen- und Maschinenantr iebeP.O. Box 1362 D - 79373 MüllheimTel +49 7631/809-0 Fax +49 7631/809-250
WERNER RIESTER GmbH & Co. KGArmaturen- und MaschinenantriebeP.O. Box 1151D - 73747 OstfildernTel +49 711/34803-0Fax +49 711/34803-34e-mail [email protected]