aula servomotor 1
DESCRIPTION
servomotores - características e aplicaçãoTRANSCRIPT

PROF. JOÃO CARLOS SERVO-MOTORES
Conteúdo
Introdução aos servomotores R/C
Especificações de um servo R/C
Anatomia de um Servo R/C
Forma de Funcionamento e Controle de Posição
Adaptação do servo para giro contínuo
Servo Dinamixel comando serial projeto CP1
Introdução
Servomotores são motores com sistema de controle de
posição ou velocidade em malha fechada incorporados
São utilizados tipicamente em servomecanismos (ex. piloto automático de veículos e aeronaves, navegação de mísseis e
foguetes, escadas rolantes, máquinas de bobinamento,
elevadores, etc.).
Três tipos básicos de servomotores são usados em
servosistemas modernos: servomotores AC, baseados em
projetos com motores de indução; servomotores DC,
baseados em projetos com motores de corrente contínua; e
servomotores sem escovas AC, baseados em projetos com
motores síncronos.
Introdução
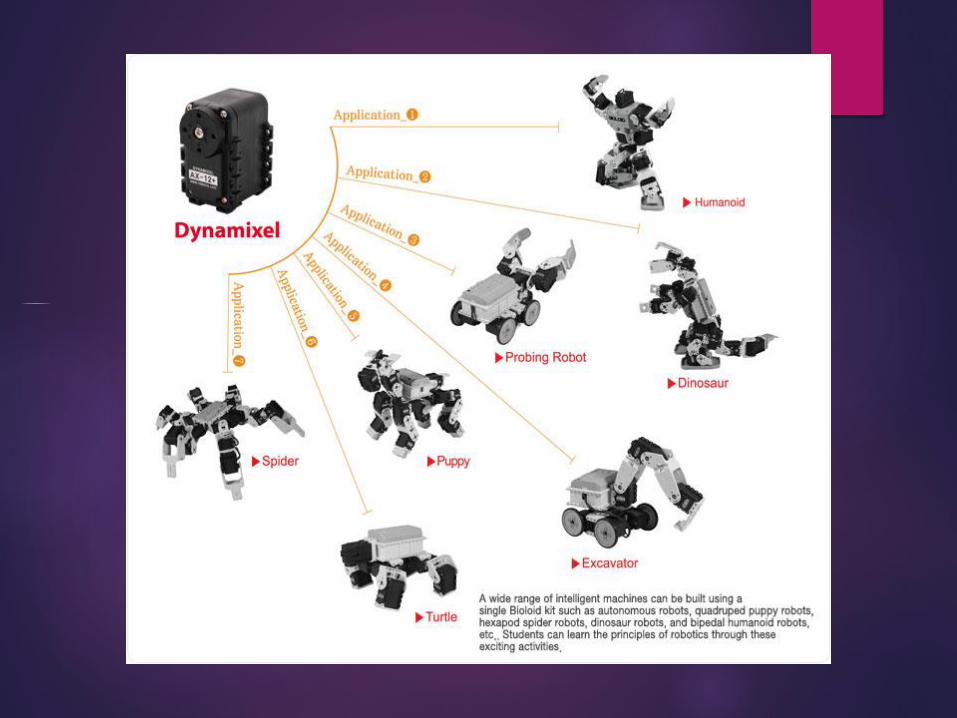
O foco desta oficina está nos servomotores
usados nas áreas de robótica, mecatrônica e
modelismo com controle remoto (aeromodelos,
barcos e carros)
Estes servomotores são chamados usualmente de
“Servos” ou “Servos R/C” (remote control)


Servomotores para Robótica/Mecatrônica/Modelismo
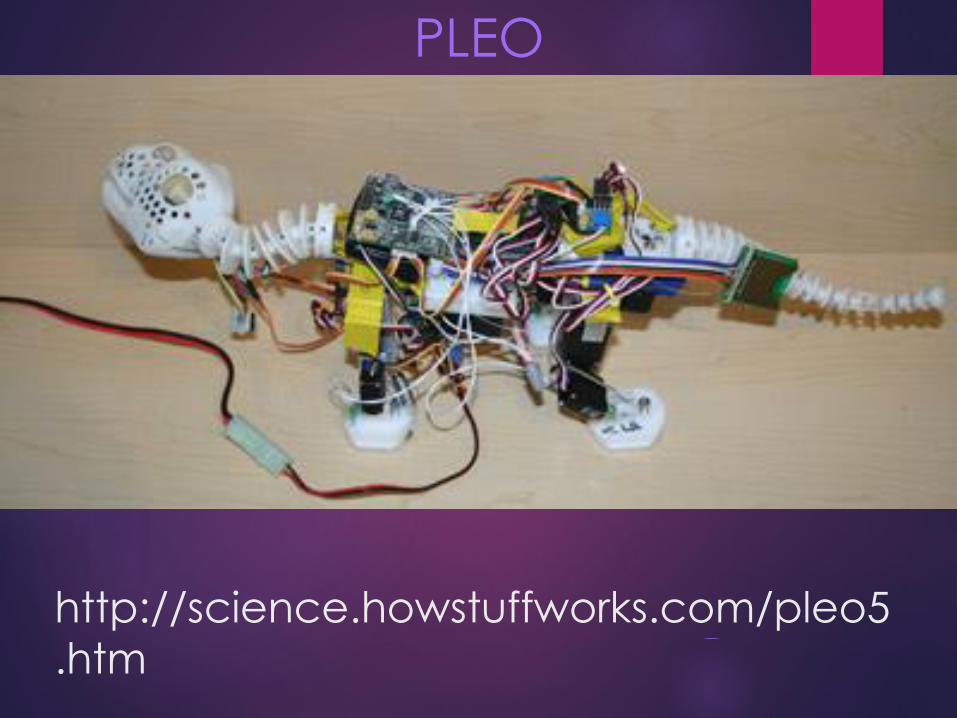
http://science.howstuffworks.com/pleo5
.htm
PLEO
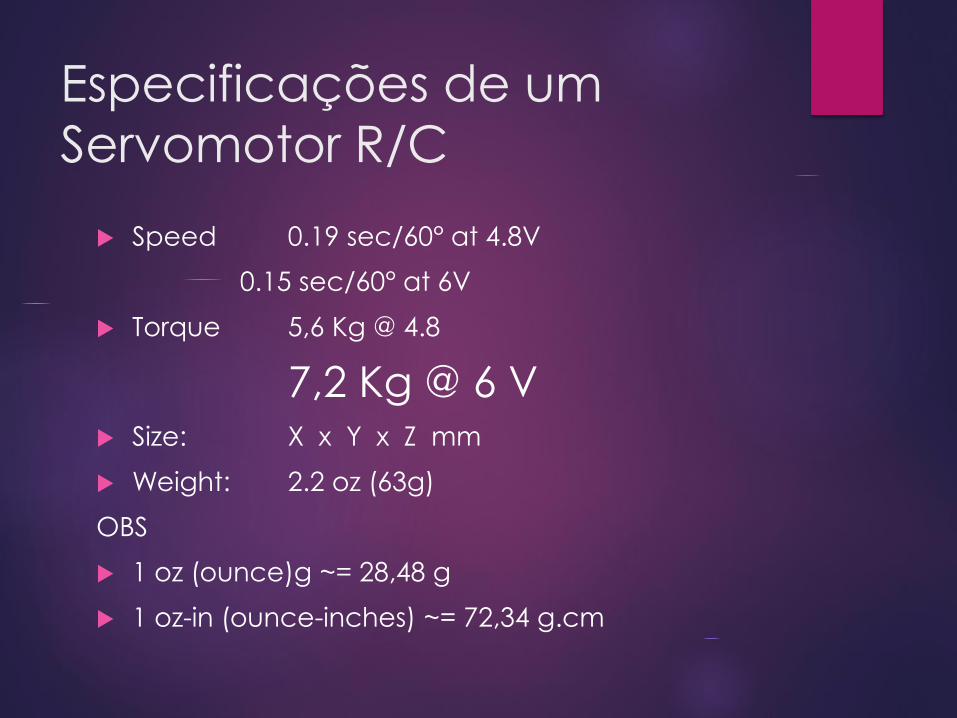
Especificações de um
Servomotor R/C
Speed 0.19 sec/60° at 4.8V
0.15 sec/60° at 6V
Torque 5,6 Kg @ 4.8
7,2 Kg @ 6 V Size: X x Y x Z mm
Weight: 2.2 oz (63g)
OBS
1 oz (ounce)g ~= 28,48 g
1 oz-in (ounce-inches) ~= 72,34 g.cm
Grandes Fabricantes de
Servos R/C
Hitec www.hitecrcd.com/
Futaba www.futaba-rc.com/
Cirrus cirrus.globalhobby.com/Servos.asp/
Dinamixel www.robotis.com/
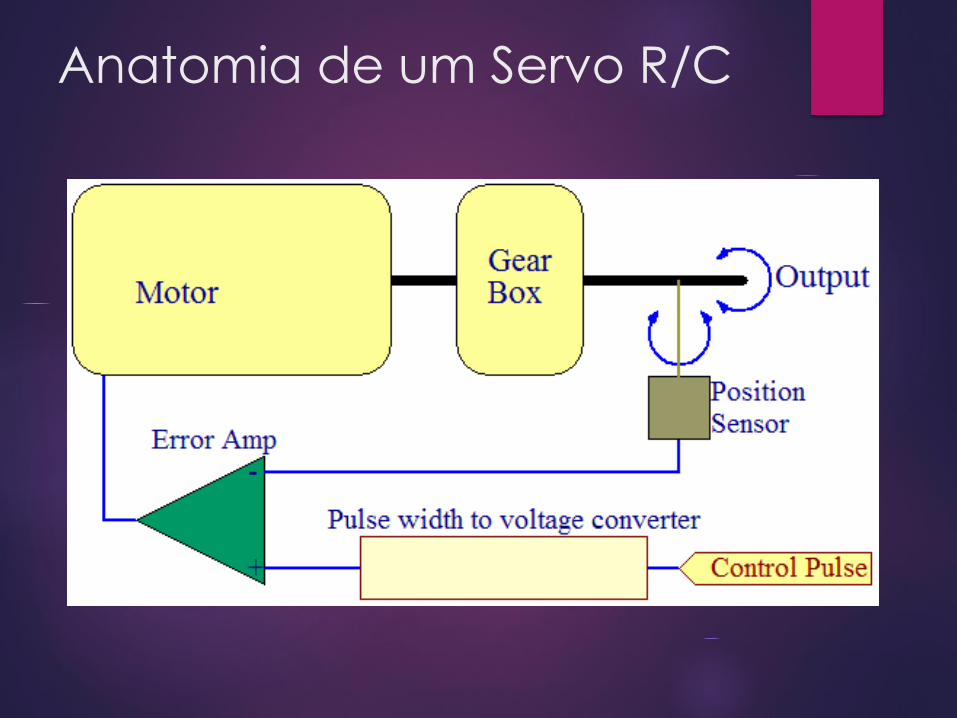
Anatomia de um Servo R/C

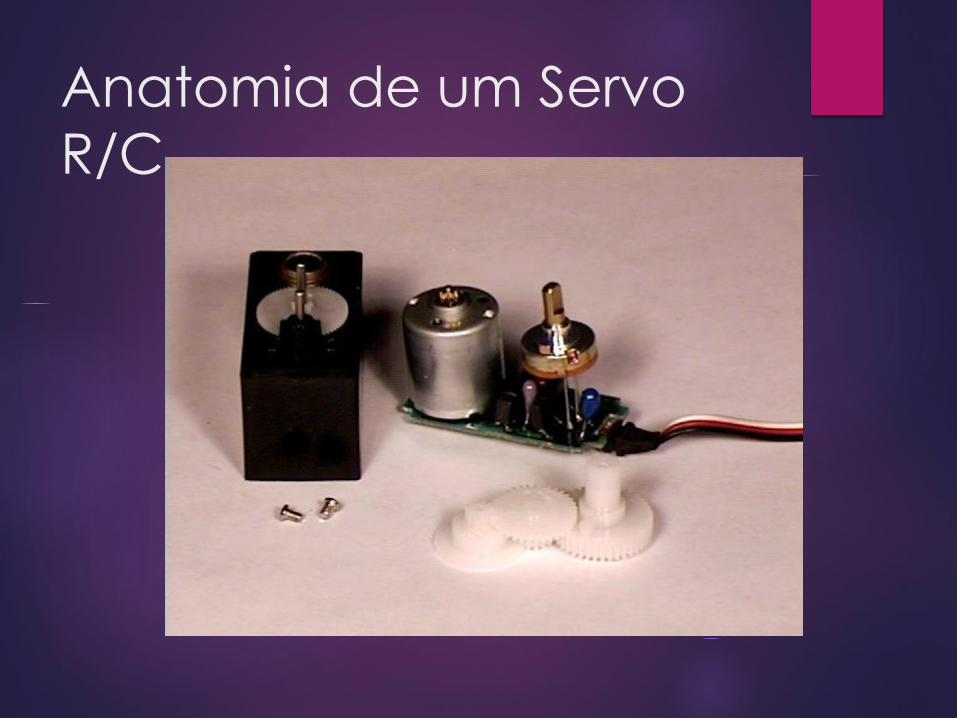
Anatomia de um Servo
R/C
Servo motor
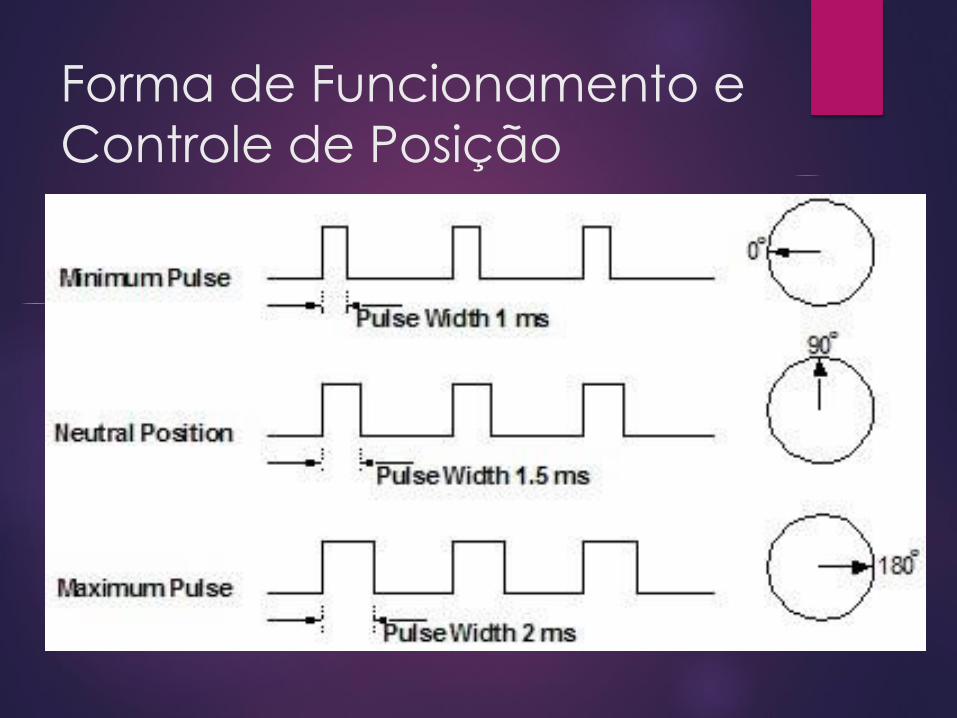
• O sinal de posicionamento é um pulso entre 0,75 e
2,25 milissegundos (ms) de comprimento, repetido a
cada 18ms ( cerca de 50 pulsos por segundo). Com um
pulso de 0.75ms, os servo move-se para uma das
extremidades da sua gama, e com um pulso de 2,25
ms do servo move-se para o outro. Portanto, com um
pulso de 1,5 ms, o servo irá se mover para a posição
do centro. Se os impulsos são interrompidos o servo irá
mover-se livremente para qualquer posição.
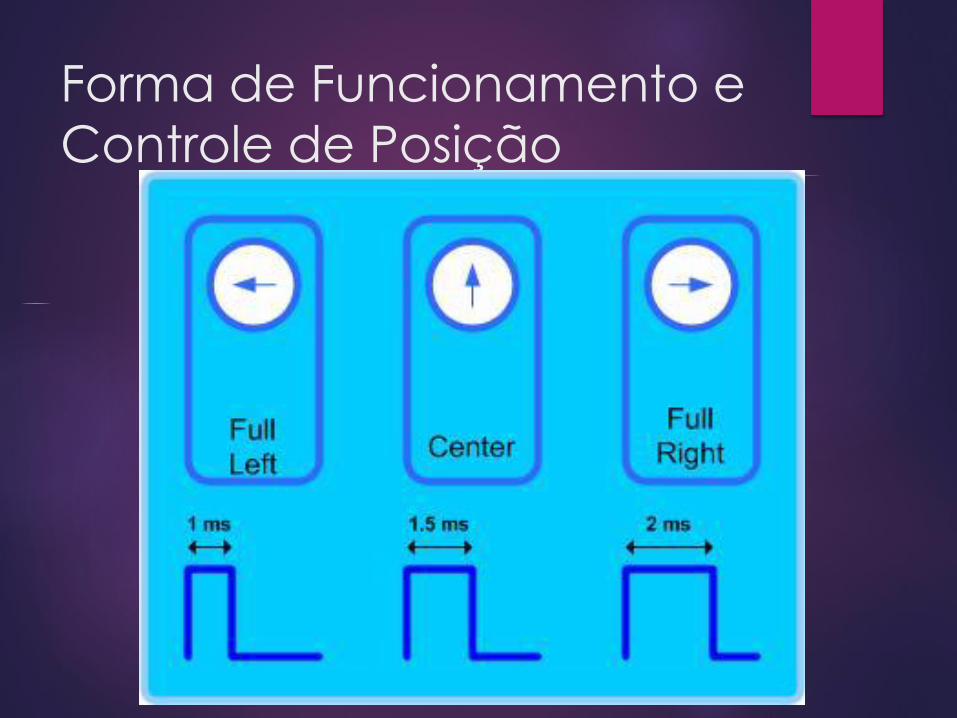
Forma de Funcionamento e
Controle de Posição
Forma de Funcionamento e
Controle de Posição
Servo motor
• Infelizmente servos requerem uma grande corrente (até
1A) e também pode introduzir uma grande quantidade
de ruídos gerados para a sua alimentação.
• Portanto, na maioria dos casos, podemos utilizar duas
fontes de alimentação, mas o GND deve ser comum
aos dois.
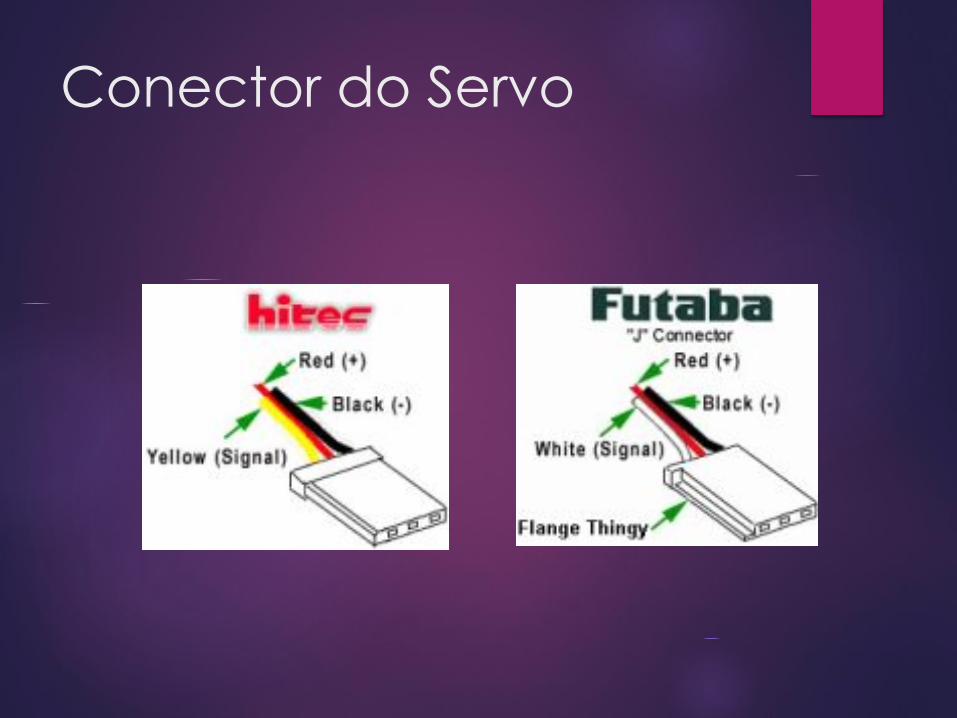
Conector do Servo

Controle de Velocidade
por PWM
PWM – Pulse Width Modulation
Modulação por largura de pulso
Pulsos de 1 a 2 ms em frames de 20ms
Evolução dos
Servomotores RC
Servos Digitais
http://www.futaba-
rc.com/servos/digitalservos.pdf
Servos Brushless
http://www.futaba-
rc.com/servos/brushlessservos.html
Servos Digitais
Desempenho otimizado
Deadband melhorado
Resposta mais rápida
Aceleração/desaceleração suave, melhorada
Melhor resolução e potência de hold
Gasta mais energia
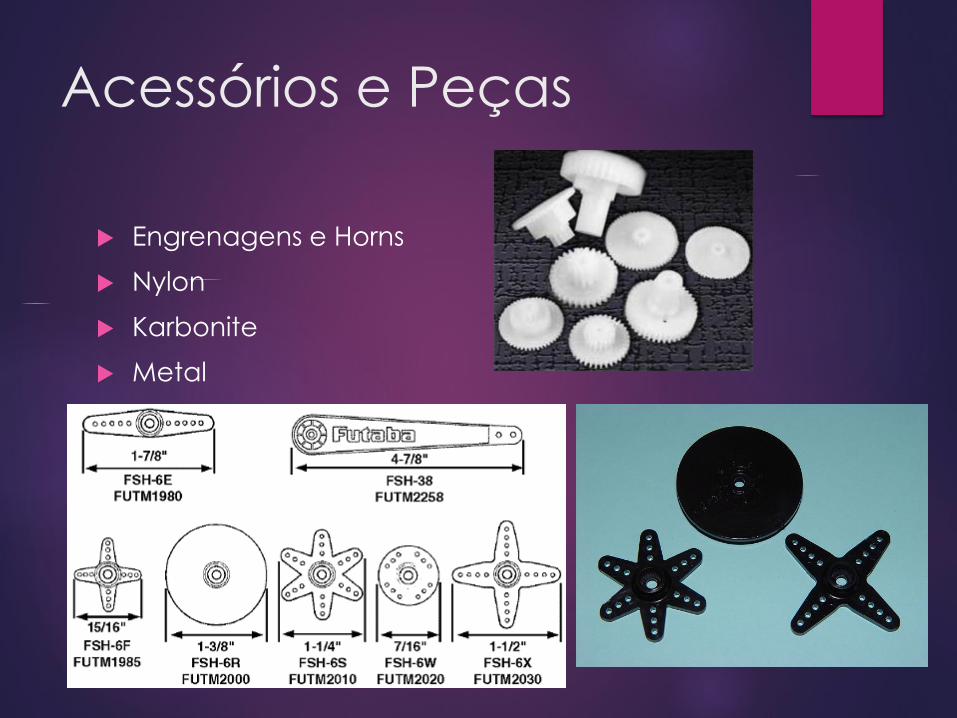
Acessórios e Peças
Engrenagens e Horns
Nylon
Karbonite
Metal

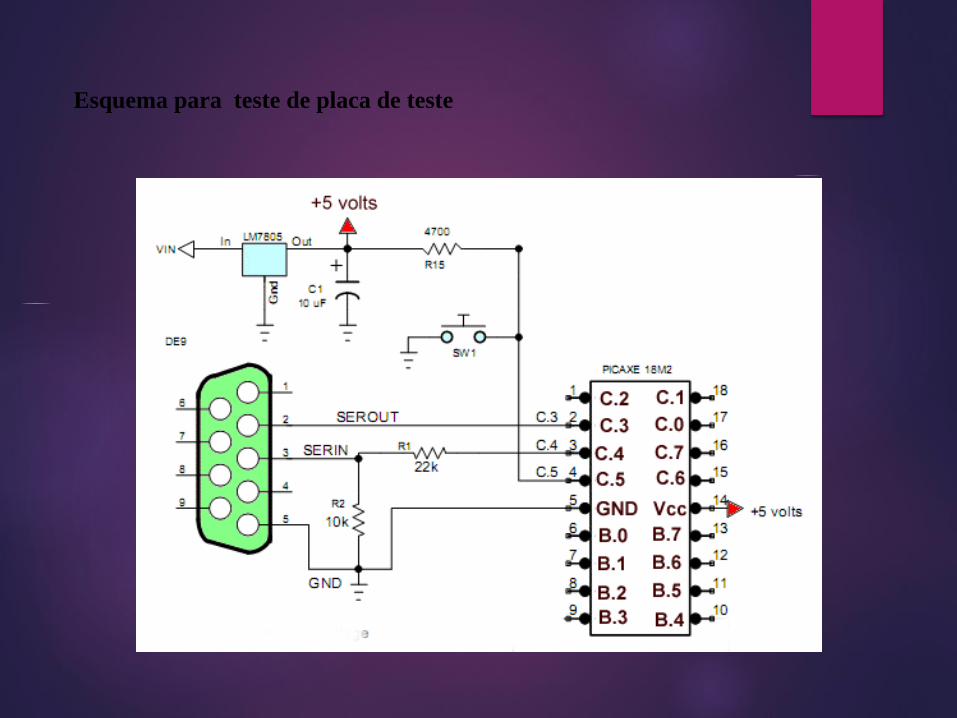
Esquema para teste de placa de teste
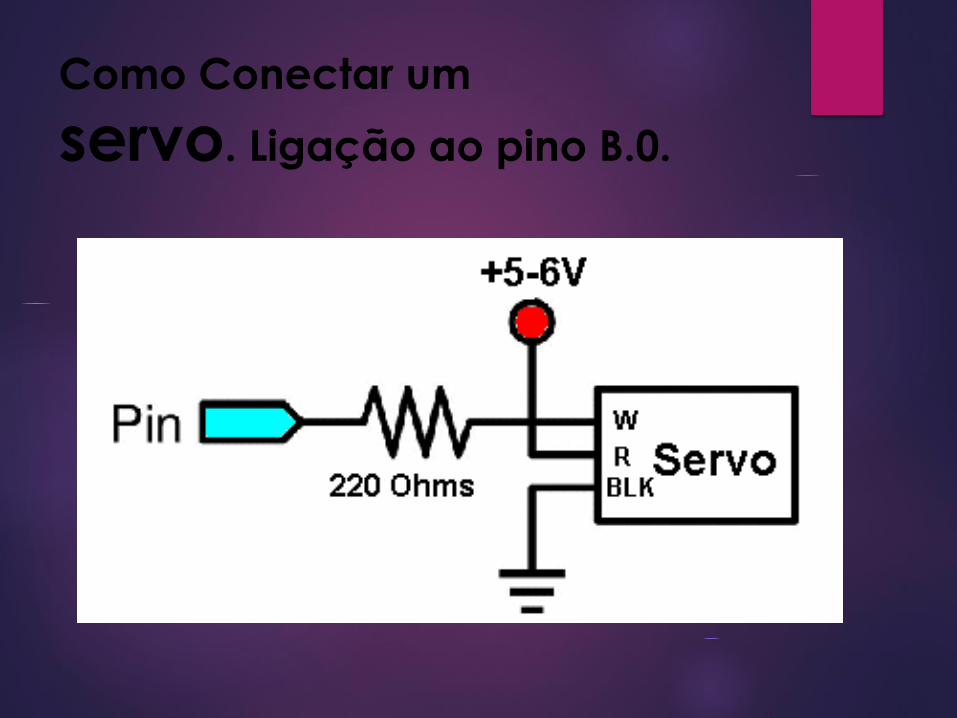
Como Conectar um
servo. Ligação ao pino B.0.
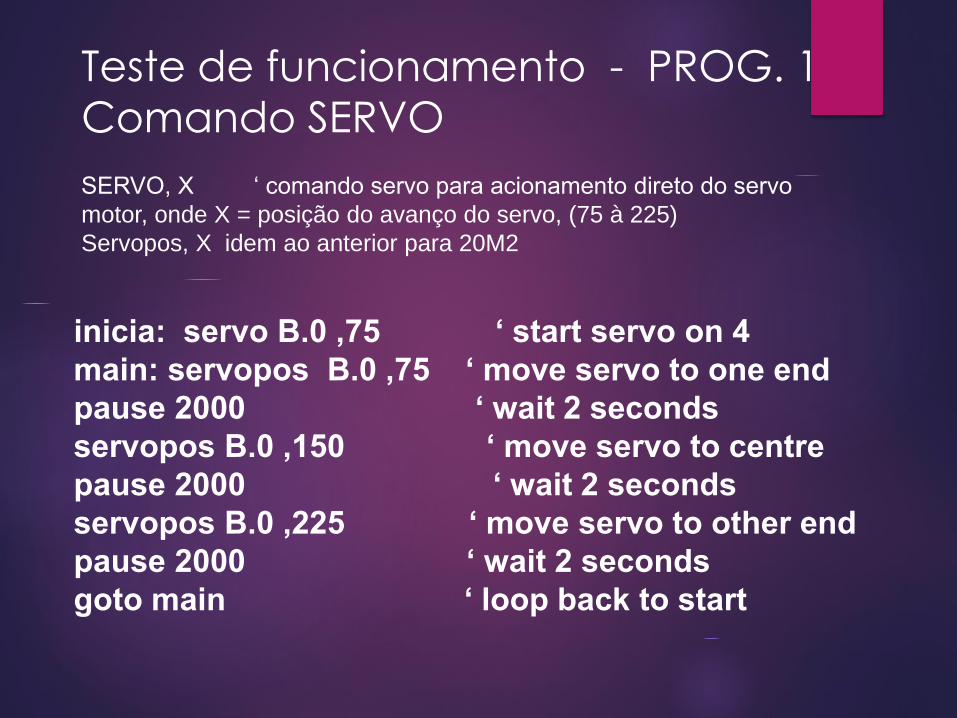
Teste de funcionamento - PROG. 1
Comando SERVO
SERVO, X ‘ comando servo para acionamento direto do servo
motor, onde X = posição do avanço do servo, (75 à 225)
Servopos, X idem ao anterior para 20M2
inicia: servo B.0 ,75 ‘ start servo on 4
main: servopos B.0 ,75 ‘ move servo to one end
pause 2000 ‘ wait 2 seconds
servopos B.0 ,150 ‘ move servo to centre
pause 2000 ‘ wait 2 seconds
servopos B.0 ,225 ‘ move servo to other end
pause 2000 ‘ wait 2 seconds
goto main ‘ loop back to start
CONTINUA NA AULA
SEGUINTE...