artificial intelligence, heuristic frameworks and tabu searchleeds-faculty.colorado.edu/glover/ts -...
TRANSCRIPT

MANAGERIAL AND DECISION ECONOMICS, VOL. 1 1 , 3 6 5 - 3 7 5 ( 1 9 9 0 )
Artificial Intelligence, HeuristicFrameworks and Tabu Search
Fred GloverCenter for Applied Artificial Intelligence, Graduate School of Business, University of
Colorado, Boulder, CO, USA
This paper examines some of the characteristics of Al-based heuristic procedures that haveemerged as frameworks for solving difficult optimization problems. Consideration of attributesshared to some degree by human prohlem solvers leads to focusing in greater detail on one of themore -ituccessful procedures, tabu search, which employs a flexible memory system (in contrastto 'memoryless^ systems, as in simulated annealing and genetic algorithms, and rigid memorysystems as in branch and bound and A* search). Specific attention is given to the short-termmemory component of tahu search, which has provided solutions superior to the best obtainedby other methods for a variety of problems. Our development emphasizes the principlesunderlying the interplay between restricting tbe searcb to avoid unproductive retracing of patbs(by tneans of tabu conditions) and freeing the search to explore otherwise forbidden avenues (byaspiration criteria). Finally, we discuss briefly the relevance of a supplementary framework,called target analysis, which is a method for determining good decision rules to enable heuristicsto perform more effectively.
INTRODUCTION
Heuristic approaches to optitnization problemsabound, and many claim some connection to artifi-cial intelligence. Generally speaking, good heuristicprocedures arc based on ideas that can trace theirorigins equally to the fields of artificial intelligenceand operations research. (This is not too surprising,since the two fields emerged from common be-ginnings.) Nevertheless, whether due to differencesof emphasis or to differences in the supply of'congenial metaphors', recent heuristic innovationshave tended frequently to become aligned with Al.Hence in order to investigate what is current inheuristic ideas it is appropriate to examine proced-ures that have acquired some of the imprint of theAl domain.
Given the proliferation of heuristic procedures inthis category, there is some challenge to identifyingthose that are more significant, or that at leastembody principles that have widespread utility.Currently, four methods that are perceived as affili-ated in some measure with the Al field have gainedprominence asframeworks for solving difficult prob-lems: neural networks, simulated annealing, geneticalgorithms and tabu search.
Neural networks have claimed intriguing suc-cesses in pattern-recognition applications, but have
generally performed less than impressively in op-timization settings. They have demonstrated theirprimary value for problems whose structures can beexploited by processes likened to those of 'associ-ative memory', and appear less well adapted (so far)to the solution of optimization problems in broadercategories. While these approaches have a greatdeal that is inherently fascinating about them, parti-cularly concerning the directions in which they mayevolve, neural networks api>ear to show greatestpromise in partnership with other methods, and arecoming to rely on one of the other three heuristicframeworks to improve their effectiveness in anumber of applications.
Simulated annealing and genetic algorithmsdraw on analogies to phenomena in the physicaland biological sciences, respectively, and have theattractive feature of assured convergence underappropriate assumptions. It should be cautioned,however, that convergence in these procedurestakes a less than impressive form, couched in prob-abilistic assertions. In simulated annealing, for ex-ample, optimality is guaranteed to be achieved withprobability 1 after an infinite number of iterations.The guarantee offered by genetic algorithms islikewise probabilistic and refers only to certainclasses of "undominated" solutions. Consequently,members of the Al and OR communities who are
0143-6570/90/050365-1 l$O5.5O© 1990 by John Wiley & Sons, Ltd.

366 F. GLOVER
less religiously attached to mathematical demon-stration (e.g. who would like to see convergencetake place in the world we know) may prefer toplace greater stock in the empirical performance ofsuch approaches than in their theoretical under-pinnings. Fortunately, a number of instances ofefFective empirical performance have been docu-mented, attesting to the value of these procedures aspractical tools.
From an Al standpoint, one of the more inter-esting features of simulated annealing and geneticalgorithms is that they are virtually memoryless.Each operates by using a form of threshold to allowrandomly sampled moves to alter current solutions.and to initiate subsequent iterations of search.Memory has no role except as implicit in thestructure of solutions generated from one stage tothe next as a result of progressively applied screen-ing criteria.
Mathematically, there is a good reason for this.At our present level of mathematical developmentwe are unable to provide theorem-proof demon-strations for the behavior of systems that embodymemory, except in its most trivial or most rigidforms. Leading in popularity are the systems withno memory whatsoever, which simply involve rulesfor transforming a present state into a successor,closely followed in popularity by the 'highly struc-tured' memory systems exemplified by branch andbound. A* search, and their relatives.
Beyond the appeal of being susceptible to math-ematical analysis, memoryless systems have theattraction of appearing to effectively serve certainrealms of physics and biology (at a stage of evolu-tion that precedes the development of a complexbrain), while rigid memory systems appeal to no-tions of orderliness (as manifested in what may becalled a search-by-bookkeeping orientation).
To the extent that Al motivates a notion ofintelligence that involves freer reign with the use ofmemory, however, we may conceive it worthwhileto explore frameworks that embrace more fiexiblememory structures. Mathematics may not yet beable to justify certain forms of intelligence, but wemay suspect that this should not compel us toabandon such forms of intelligence in buildingsolution methods.
This latter view provides the perspective adoptedin this paper—a perspective that also underlies thedevelopment of the fourth heuristic framework,tabu search. Consequently, the class of approachesembodied within tabu search will be the chief focus
of the material that follows. In addition, we willbriefly offer a fifth framework for consideration,called target analysis., which is not a heuristicsolution procedure but a form of leaming approachdesigned to determine good variants of such solu-tion procedures.
TABU SEARCH
Tabu search is a higher-level method, or meta-strategy, for solving optimization problems. Thistechnique is designed to be superimposed on anyprocedure whose operation can be characterized asperforming a sequence of moves that lead theprocedure from one trial solution (or solution state)to another. Each move is assumed to be selectedfrom a set of currently available alternatives, and issusceptible to being evaluated by one or morefunctions that measure its relative attractiveness insome local sense. When the solution produced bythe move is feasible, for example, the objectivefunction value itself provides such a measure.
The well-known hill-climbing heuristics fall withinthe class of procedures susceptible to being embed-ded within tabu search. In general, a hill-climbingheuristic progresses from an initial feasible solutionalong a path that changes the objective functionvalue in a uniformly descending or ascending direc-tion (for minimization or maximization, respect-ively) until no further improvement ofthe objectivefunction is possible by means of the availablemoves. At the stopping point, the solution obtainedis a local optimum that, for combinatorial prob-lems, very rarely is also global (i.e. rarely the bestsolution across the entire range of feasible possibil-ities). In this context, tabu search provides a guidingframework for exploring the solution space beyondpoints where an embedded heuristic would becometrapped at a local optimum.
The most basic form of tabu search consists ofintroducing tabu restrictions that classify certainmoves as forbidden, together with aspiration cri-teria capable of overriding the tabu status of moves(where appropriate). These activities have a time-dependent dimension that can be implemented bymeans of a short-term memory function. Moreelaborate tabu search procedures include inter-mediate and long-term memory functions to carryout additional strategic operations.
The success of the method has been noteworthy.Although, at present, tabu search is not nearly as

TABU SEARCH 367
widely studied as simulated annealing and geneticalgorithms—and, correspondingly, more remainsto be learned about the best ways to apply themethod—there are already a number of problemsettings where tabu search has been able to findsolutions superior to the best results previouslyobtained by any method. In other cases, tabu searchhas been demonstrated to offer advantages in easeof implementation or in the flexibility to handleadditional considerations (such as constraints of aform not encompassed by the original problemformulation).
Applications of tabu search where superior per-formance and/or greater adaptability have beenreported cover a considerable spectrum, includingemployee scheduling (Glover and McMillan, 1986),machine scheduling (Laguna, 1989; Laguna et al,1989), maximum satisfiability problems (Hansenand Jaumard, 1987), space planning and architec-tural design (Glover *•/ al, 1985), computer channelbalancing (Glover, 1989a), character recognition(Hertz and de Werra, forthcoming), convoyscheduling (Bovet, 1987), telecommunications pathassignment (Ryan et al, 1989), quadratic assign-ment problems (Skorin-Kapov, 1990), nonlinearcovering problems (Glover, 1990), traveling sales-man problems (Knox, 1989; Maiek et al, 1989a, b),flow-shop sequencing problems (Windmer andHertz, forthcoming), job-shop scheduling prob-lems (Eck, 1989), graph coloring and partitioningproblems (Hertz and de Werra, 1987; Wendelin,1988), maximum stable set problems (Friden et al,1989), and a variety of others (see, e.g., the surveys inGlover, 1989a, 1990; Hertz and de Werra, forth-coming).
In the domain of combinatorial problem solvingthere is still a long way to go, however, and the goalremains to do better tomorrow than today. Ack-nowledging this, the large body of positive resultsfor a procedure that is just beginning to be studiedsuggests the tabu search framework may offersomething of value in a number ofthe areas current-ly considered challenging. Viewed from the per-spective of research, the new types of memoryschemes appropriate to tabu search motivate thedevelopment of correspondingly new data struc-tures and processing methods. Tabu search alsoinvites new applications for cutting-plane theory(including the introduction of 'pseudo' cuttingplanes, which may be purged with the expiration ofa short-term memory tenure), and new quests forprobability theory in the versions of probabilistic
tabu search. Some ofthe features ofthe method areelaborated in the following sections.
BASIC ELEMENTS
Tabu search may be viewed as a nested hierarchy oflong-, intermediate- and short-term memory func-tions, with the short-term function constituting thecore of the procedure. The short-term memorycomponent of the method operates by selectingmoves designed to progress quickly to a localoptimum (seeking those with the highest evalu-ations, subject to trade-offs involved in the effort ofidentifying such moves), and then to go beyond thelocal optimum by forbidding moves with certainattributes (making them tabu). No concern is givento the fact that the best moves available may notimprove the current solution. Instead, the methodselects the moves with highest evaluations, from theset not classified as tabu, to drive the search intonew regions. The process generates a trajectory thatoften includes a large portion of high-quality solu-tions, while periodically obtaining solutions betterthan the best found previously during the search.Each such pass ofthe short-term memory compon-ent continues until a specified number of iterationselapses since the best solution was last improved oruntil an overall cutoff limit is reached.
The intermediate and long-term memory func-tions of tabu search co-ordinate successive passes ofthe short-term memory component, or successiveintervals of a given pass, to achieve goals that maybe described as local intensification and globaldiversification ofthe search (Glover, 1989a, 1990).These memory functions operate as boosters toobtain solutions of still higher quality or to permitsolutions of a given quality to be obtained moreefficiently.
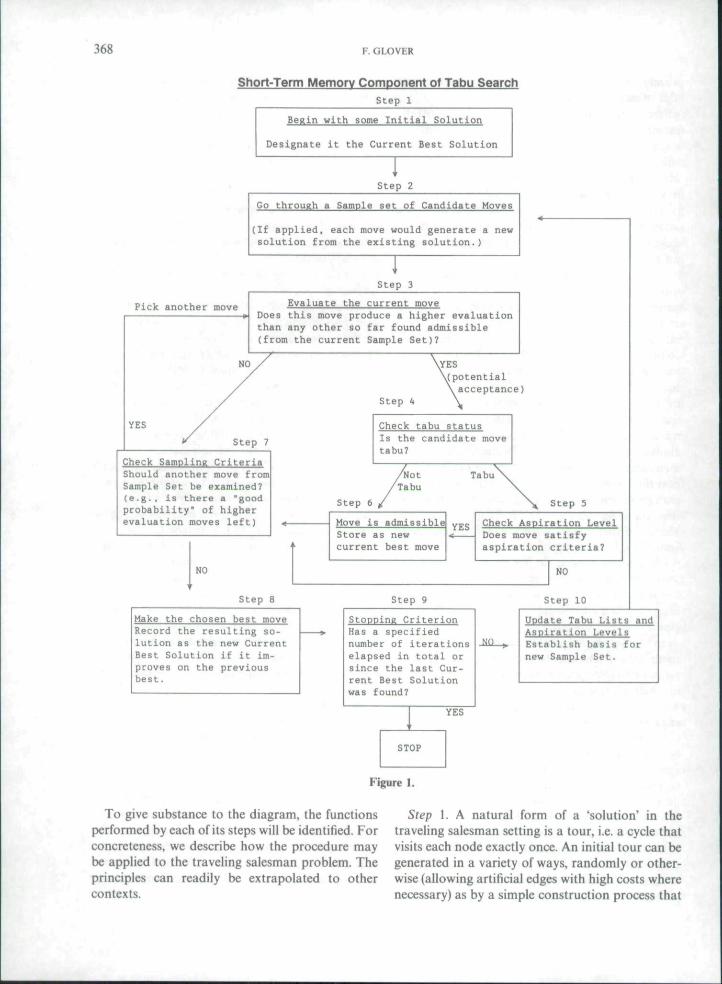
Because of the central role of the short-termmemory component, we will focus on its operationsin the remainder of this section. To provide a fullerunderstanding of how this component operates, adiagram ofa single pass of this procedure is given inFig. 1, adapted from Glover (1989b).
The word 'solution' as used in this figure admits afiexible interpretation. It can represent what iscommonly called a trial solution, or even a partialsolution; i.e. it may not satisfy all constraints orspecify values for all variables. A form of evaluationcriterion is used that permits different solutions (ofwhatever tyi>e) to be compared. •- J - :
368 F. GLOVER
Short-Term Memory Component of Tabu SearchStep 1
Begin with some Initial Solution
Designate it tbe Current Best Solution
Step 2
.ffo throuRh a Sample set of Candidate Moves
(If applied, each move would generate a newsolution from the existing solution.}
iStep 3
Pick another move Evaluate the current moveDoes tbis move produce a higher evaluationtban any other so far found admissible(from tbe current Sample Set)?
YES
Step
[potentialacceptance)
Step 7
Check Sampling CriteriaShould another move fromSample Set be examined?(e.g., is there a "goodprobability" of bigberevaluation moves left)
Cbeck tabu statusIs tbe candidate movetabu?
Step 6
Tabu
step 5
HO
Hove is admissibleStore as newcurrent best move
YES Cbeck Aspiration LevelDoes move satisfyaspiration criteria?
NO
Step a Step 9 Step 10
Make tbe chosen best moveRecord the resulting so-lution as tbe new CurrentBest Solution if it im-proves on tbe previousbest.
Stoppina CriterionHas a specifiednumber of iterationselapsed in total orsince the last Cur-rent Best Solutionwas found?
Nn .,
update Tabu Lists andAspiration LevelsEstablish basis fornew Sample Set.
YES
STOP
Figure 1.
To give substance to the diagram, the functionsperformed by each of its steps will be identified. Forconcreteness, we describe how the procedure maybe applied to the traveling salesman problem. Theprinciples can readily be extrapolated to othercontexts.
Step 1. A natural form of a 'solution' in thetraveling salesman setting is a tour, i.e. a cycle thatvisits each node exactly once. An initial tour can begenerated in a variety of ways, randomly or other-wise (allowing artificial edges with high costs wherenecessary) as by a simple construction process that

TABU SEARCH 369
grows a progressively enlarging chain until the lastedge completes the tour.
Step 2. A Sample Set of candidate moves for thetraveling salesman problem may consist, for ex-ample, of the standard '2-OPT' moves, or swaps,which result by dropping any two nonadjacentedges and adding the unique pair of edges that willproduce a different tour. Where the set of suchmoves is large, the Sample Set may be chosen as asubset, as by subdividing the tour in various waysand allowing only those swaps that occur withingiven components of the subdivision. (An approachof creating sample sets by such subdivisions hasproved highly effective in applications of tabusearch to machine scheduling problems (Lagunaet ai, 1989).)
Step 3. The evaluation of the current candidatemove can be applied in the case of 2-OPT moves bycomparing the lengths of the two added and twodeleted edges to see if the resulting tour would beimproved. To take the 'YES branch' from this step,leading to Step 4, the move must have a higherevaluation than those in the Sample Set so far foundadmissible, where 'admissible' is defined as a resultof passing tests in subsequent steps. Until a movefrom the Sample Set is found that thus qualifies asadmissible, and therefore provides a basis for com-parison, all moves take the YES branch from theevaluation step (to see if they may in fact becomeadmissible).
Step 4. This step embodies a key issue of theprocedure, which is to establish a basis for decidingif a move being examined should be classified astabu. To create this basis, the most straightforwardapplication of tabu search maintains a tabu list thatrecords selected attributes of each move made. Forexample, each element of the tabu list for 2-OPTmoves could be a four-component vector whosefirst two entries identify the edges added by themove and whose last two entries identify the edgesdeleted.
The tabu list embodies one of the primary short-term memory functions of the procedure, which itexecutes by recording only the t most recent moves,where / is the parameter that identifies the 'size' ofthe list. Considerable success has resulted fromstrategies that keep f at a fixed value. However,recent experimentation (Taillard, 1990) disclosesthat better performance results by varying t within achosen interval of values, remaining with a givenvalue for approximately 2t consecutive iterationsbefore choosing another.
To implement the procedure, an array denotedtabu-time (e) is created which identifies the (mostrecent) iteration when a move 'containing' a speci-fied attribute e was made. Attributes generally aredefined so that each has a natural complement or'reverse' attribute, (e.g., the complement of an at-tribute that corresponds to adding a particular edgeis the attribute that corresponds to dropping thatedge.) Then the repetition of a move containing anattribute e is avoided, along with other associatedmoves, by classifying e tabu (hence forbidding itsinclusion in future moves) as long as tabu-time (e)lies within t iterations of the current iteration. Thereversal of a move is avoided similarly by classifyingthe complement f of e tabu as long as tabu-time (f)does not exceed the difference 'current iteration~t\ Avoiding move reversals is frequently a moreeffective strategy than avoiding move repetitions,although in some contexts (Glover, 1989a) it isappropriate to prevent both reversals and repeti-tions, according to the type of move employed.
The attributes of moves that are chosen to berecorded in the elements of the tabu list can be usedin a variety of ways to define tabu status. Suchdifferences are important and generate search pathswith different characteristics. Generally it seemsworthwhile to create a separate tabu list and tabulist 'size' t for each attribute class. For example,added edges and deleted edges can each have theirown lists, and the size of the list for added edges (toprevent them from being subsequently deleted)should normally be somewhat smaller than fordeleted edges (to prevent them from being sub-sequently added back), reffecting the fact that thenumber of edges contained in a traveling salesmantour is generally somewhat smaller than the numbernot in the tour. Best ranges for t (as in the approachthat varies t between selected limits) typically lie in aproper subset of the interval from n/3 to 3n, where nis related to problem dimension (such as the num-ber of nodes or edges of a graph, or a square root ofthis number). However, in some applications asimple choice of r in a range centered around 7seems to be quite effective. In any case, good rangesare characteristically easy to identify and highlyrobust. Dynamic tabu list strategies that employ"moving gaps" are emerging that may prove evenmore successful (Hubscher and Glover, 1990). Therelation between diflerent tabu list structures andthe types of restrictions for classifying moves tabu(as a function of selected move attributes) is animportant area for research. i i ' »
370 F. GLOVER
One goal of this application of short-term mem-ory is to avoid a solution path that duplicates asequence of solutions, i.e. to avoid cycling (looselydefined, since sometimes it is preferable to return toa previous solution to find an improved path lead-ing away). Because the manner of cycle avoidanceinvolved in the operation of the tabu list is highlyflexible—much more so than branch and bound, forexample—it does not give an absolute theoreticalassurance that cycling is impossible. Nevertheless,from an empirical standpoint the tabu list performsthis function highly effectively for appropriatevalues of t. (More advanced types of tabu lists,theoretically motivated, are now emerging (Glover,1990).)
Step 5. Another key issue of tabu search ariseswhen the move under consideration has been foundto be tabu. If appropriate aspiration criteria aresatisfied, the move will still be considered admiss-ible in spite of its tabu classification. Roughlyspeaking, these criteria are designed to overridetabu status if a move is 'good enough'. The condi-tion 'good enough' must be sufficiently limiting tobe compatible with the goal of preventing thesolution process from cycling (in an appropriatesense).
Based on this motivation, a simple form of anaspiration-level check is to permit tabu status to beoverridden if the solution produced would be betterthan the Current Best Solution. Another approachis to define an aspiration level AiL) to be the lengthof the best tour that has ever been reached by amove from a tour of length L. Then, if a moveapplied to a tour of length L can produce a tourof length L* better than A{L) (i.e. L*<A{L)),the solution process cannot duplicate a sequencefollowed before.
A method that has proved useful in some appli-cations is to base the aspiration level on the sameattributes that define tabu status, and to require asolution better than the one that gave rise toclassifying such attributes tabu (Glover, 1989b;Maiek et al, 1989a). Another approach is to regarda tabu move admissible if its evaluation surpassesthat of the best non-tabu move by a specifiedmargin (which can depend, for example, on age onthe tabu list, frequency of surpassing the best non-tabu move, etc.).
Steps 6 and 7. Following the aspiration-levelcheck, either the move under examination is foundadmissible and is recorded as the new current bestmove at Step 6 or the process proceeds directiy to
Step 7 to check the sampling criteria. The latter stepis a dynamic means of monitoring the definition ofthe Sample Set, and hence of choosing the *bestmove' from this set at each iteration. Thus, forexample, one form of dynamic sampling strategy isto stop as soon as a move of a specified level ofattractiveness is found. If, at the extreme, this level isset to admit any move that creates an improvementin the current tour, then the result is the same as theclassical heuristic hill-climbing procedure, until asituation is reached where no improving moveexists. Tabu search, however, favors a more aggres-sive orientation, seeking the highest-quality movethat can be expected for a given expenditure ofsearch effort, subject to the restrictions imposed bythe tabu conditions and moderated by the aspira-tion level.
The operation of checking the sampling criteriaat Step 7 has an additional function. Except in thosevariations where tabu status is enforced by penali-zing rather than forbidding certain moves, it ispossible that no move in the Sample Set is admiss-ible. Once such a condition is discovered, the opera-tion of selecting another move is performed bytemporarily relaxing the tabu restrictions to allowat least one of the tabu moves to be classifiedadmissible. Alternatively, if the Sample Set has beenrestricted to a subset of moves potentially available,a new Sample Set may be created.
The issue of generating effective subsets of movesfor consideration may be classified under the head-ing of candidate list strategies, and offers an ex-tremely fertile area for investigation. As observed inGlover (!989b), candidate list strategies encompassa variety of well-known procedures, including simu-lated annealing, as simple special cases.
Steps 8-10. These steps are self-explanatory orinvolve considerations already discussed.
The preceding framework for the short-termmemory component of tabu search can be appliedto a wide range of settings. Although it leaves outsome considerations that can be important in spe-cial contexts (see, e.g.. Glover, 1989a,b), its prin-ciples are directly relevant to many combinatorialproblems.
The variant of the procedure called probabilistictabu search replaces the deterministic choice rulespreviously described, by assigning probabilitiesgoverning the acceptance of available moves whichreflect their evaluations and tabu status, whileallowing aspiration criteria to override these prob-abilities for moves that are sufficiently attractive.

TABU SEARCH 371
Such probabilities characteristically are biased toencourage the selection of highest evaluationmoves, again relying on candidate list strategies tohelp isolate good alternatives when the effort ofexamining the full set is laborious. Conditions forconverging to an optimal solution with a prob-ability of I have been established for this variant byFaigle and Kern, 1989, and are shown to be moregeneral than the corresponding conditions forsimulated annealing.
AN ILLUSTRATIVE EXAMPLE
To clarify the operation of the sbort-term memorycomponent of tabu search diagrammed in the pre-vious section, and to identify some of the optionsrelevant to its application, this section traces thesolution steps for applying the to a zero-one IPproblem. The outcomes for each iteration areshown in Table 1.
A brief description of the problem objective andthe types of moves selected, together with taburestrictions and aspiration criteria, appears at thetop of the table. Below this, in the main body of thetable, the objective function value is given for thecurrent solution at each iteration, followed by themoves with the three best evaluations. These movesare listed to disclose how the method operates whenone or more of the highest evaluation moves aretabu. (Normally, the method would not undertaketo sort the top evaluations, but would simplyidentify the best admissible move according to thetabu restrictions and aspiration criteria.)
In this example the move evaluations correspondto the XQ values produced by the moves. Since theproblem has a minimization objective, these XQvalues progress from smaller to larger as the movesprogress from Best to Second-best to Third-best.
The current solution vector and the tabu list ateach iteration are shown at the bottom of the table.Initially, the tabu list (which in this example con-
Table 1. Tabu Search Illustrated _ . . ,|
Zero-One Integer Programming Problem
Objective: Minimize Xo = function of integer variables (x,, Xj, . . - . x,)Move Type: Increase or decrease value of a selected variable by 1.
(Set the value to 0 or 1)Tabu Restriction: Prevent a variable from decreasing if it was previously
increased, or from increasing if it was previously decreasedAspiration Criterion: Override the tabu status ofa move if XQ can be improved
beyond the value it had when the move was made tabuChoice: Pick the best move that is not tabu (or whose aspiration criterion is
satisfied)Iteration
2 330 80
BestmoveSecond-bestmoveThird-bestmove
x,=0 Xj-l
Currentsolution (1,0,0,0,1)Tabu state andaspirationvalue
(1,0,1,0,1) (0,0,1,0,1) (0,0,0,0,1)
x '= l (30 )
(0,1.0,0,1)
(*): Move selected.(T): Tabu.(TA): Tabu but passes aspiration test.
, = 1(30) x, = l(30)3 = 1 (80) X3=l (80)

372 F. GLOVER
tains only three elements) contains no entries, asindicated by the black dots in the cells. Thereafter,the entries in the ceils indicate both the tabu movesand, in parentheses, the aspiration values for XQwhich allow tabu status to be overridden. Theentries of the table may be explained as follows.
Iteration 1. Starting from an initial solution withXo = 60, identified by the vector (1,0,0,0, 1), themethod examines the moves that change exactlyone Xj value in this vector (from 0 to 1 or from 1 to0). The moves yielding the three best values for XQare shown in the table as X3= 1, x, = 0 and X2 = I,which, respectively, give XQ = 30, Xo = 40 andXQ = 85. (The first two moves improve the current XQvalue, while the third does not.) No moves are tabu,so the best move x, = I is selected, as indicated bythe (*) symbol. The reverse move x^^O becomestabu and is entered on the tabu list. The entryappears in the tabu list for Iteration 2 rather thanfor Iteration t, however, since this list shows thetabu status for moves at the start of each iteration.The aspiration value of 60 is recorded with the tabumove, because Xo = 6O occurs for the solution ofIteration 1, and this is the value to beat if the moveX3 = 0 is to be considered admissible.
Iteration 2. The solution obtained by setting Xj= 1 in Iteration 1 appears in the column for Iter-ation 2, identified by (1, 0, 1, 0, 1) with Xo = 30. Thebest move results by setting X3 = O to yield Xo^6O.(This discloses that a local optimum has beenreached, because the best move does not lead to asolution better than the present solution with XQ= 30). The tabu list shows, however, that the bestmove is tabu, and the associated aspiration value of60 is not surpassed by the value Xo = 60 of thismove. (The move under consideration leads directlyback to the solution of Iteration I). Consequently,the symbol (T) appears in the cell to indicate themove's tabu status. In computer implementation,tabu status arrays such as the tabu-time (e) arraypermit such information to be determined directlywithout having to search a list of the form shownhere.
The next best move, which yields Xo = 80 for Xj= 0, is not tabu and hence is selected. The reversemove, Xj = 1, is entered in the next available posi-tion on the tabu list (appearing in Iteration 3 todisclose the list condition at the start of that iter-ation), together with the aspiration value of 30,corresponding to the fact that XQ = 30 in the solu-tion of Iteration 2.
Iteration 3. The best available move once againis tabu, and hence is not taken. In this case thesecond-best move also appears on the tabu list. Thismove, X3 = 0, has an aspiration value of 60, whileyielding Xo = 40, and hence passes the aspirationtest. The symbol (TA) identifies the move's admissi-bility in spite of being tabu, and this move isselected.
The tabu list is ujxlated as before, yielding thenew tabu list which appears on the column forIteration 4. This list contains two entries for Xj, onefor Xj = 0 and one for Xj = 1. This does not currentlycreate a problem, since the entry for x_,=0 isirrelevant to the current solution (in which x^already is 0). In general, however, it would bepreferable to erase such an irrelevant entry, i.e.replacing it by a black dot in the table, to avoid thepossibility of future ambiguities.
A superior method exists for updating aspirationcriteria of the type used in this example when thetabu status of a move is overridden. An approxima-tion to this approach is to subtract an amount Dfrom the aspiration values for all tabu moves re-corded since the tabu move s that was overridden,where D is equal to the aspiration value for the tabumove recorded immediately after s, minus the as-piration value for s. If D is negative, then this stepshould only be applied to the aspiration value forthe first tabu move after s.
Iteration 4. The solution reached at this iterationis another local optimum, evidenced by the fact thatthe best available move results in XQ = 60, as con-trasted with the current Xo = 40. The second-bestmove, which is the highest evaluation move that isnot tabu, is selected. Since the most recent tabu listentry occurred in the last position, the entry for thecurrent move is made in tbe first position (to recordtbe current tabu restriction X2 = 0). This removesthe tabu restriction previously recorded in the firstposition, rendering it inapplicable.
Iteration 5. The highest evaluation move, x^^ 1,is admissible to be selected and hence becomes thecurrent choice. (The second-highest evaluationmove is also admissible as a result of passing theaspiration test.) The solution associated with thismove yields Xo = 20, which is better than any thusfar produced, qualifying the solution as the newcurrent best.
Additional columns of the table may be gener-ated in a corresponding manner, given a subroutinecapable of identifying evaluations (i.e. in this ex-

TABU SEARCH 373
Table 2. Example problem (Solved by TabuSearch in Table I)
Minimize 2O.t,-l-25x2-30x3-45x4-l-40xjSubject to
-X2 +Xt
All variables 0— 1Penalty for each unit of constraint violation:
70/unit for each of the first two constraintslOO/unit for each of the last two constraints
ample, the XQ values) that result for available moves.Table 2 identifies the problem that was solved by
the process illustrated in Table 1. (Tbe solution withXo = 20 is in fact optimal for this problem.) Thistable was not provided earlier because of the diffi-culty of tracing relevant correspondences betweenthe solution process and the problem data, and theeffort of verifying the associated arithmetic calcu-lations. Table 2 is instructive at this point as ameans of disclosing how tabu search can be appliedto a problem of this type in more than one way.
The initial solution of Table 1 is feasible for theproblem of Table 2. The solution process illustratedin Table 1 is not based on requiring all subsequentsolutions to be feasible, but instead allows consid-eration of infeasible moves, which are evaluated byimposing penalties on violating the constraints.These penalties, identified in Table 2, produce asolution trajectory in which one of the constraintsbecomes violated during the solution process.(Other penalties, leading to different trajectories,also could have been used.)
Combinatorial optimization problems are notalways conveniently structured to assure a feasiblepath will exist between all feasible solutions, andhence some method of allowing infeasible solutionsto be evaluated and visited is important. Besidesemploying evaluators that penalize infeasibilities invarious ways, tabu search also provides an ap-proach called strategic oscillation, which introducesadditional tabu restrictions to compel the search tocross feasibility boundaries to various depths(Glover, 1986, 1989a). The strategic oscillation ap-proach has been effective in applications that haveincluded the solution of p-median (lock box) prob-lems and large-scale employee scheduling problems(Glover, 1989a; Glover and McMillan, 1986).
From the perspective of the example problem thisapproach leads to consideration of a particularvariation that invites further exploration. The stra-tegic oscillation procedure often incorporates ashifting evaluation criterion that varies the em-phasis on feasibility and optimality considerations(at different depths and on different sides of feasibil-ity boundaries). A natural way to carry out this typeof process is to use adaptive penalty values for thedifferent problem constraints.
For any given set of such penalties the problem iseffectively transformed into an integer goal pro-gramming problem. Consequently, the use ofsuccessive (implicit) transformations of this sortgives rise to what may be called a tabu goal pro-gramming procedure, where the word *tabu' conveysnot only the use of tabu lists to avoid cycling but theadaptive manipulation of penalties according to theobjectives of the strategic oscillation element oftabu search. (Effective use of such penalties shouldreduce the size of the tabu list that otherwise mightbe employed.) This type of procedure offers inter-esting possibilities to be investigated in integerprogramming applications.
TARGET ANALYSIS
A careful consideration of heuristic solution pro-cedures sooner or later encounters the challenge ofdetermining more advanced evaluation measuresthan embodied in objective function values pro-duced by available moves, as the preceding discus-sion underscores. In contexts where relaxationstrategies are used, as in obtaining LP solutions aspart of a method for solving integer programmingproblems, a true objective function value for a move(which results when the relaxed formulation isreplaced by the original) may not be known orreadily determined. A similar situation occurs incertain scheduling problems, where the implica-tions of making a move do not become visible untilthe schedule approaches a completed state.
Target analysis (Glover, 1986; Glover and Green-berg, 1989; Glover and Laguna, 1989; Glover et ai,1989) is a method that can be used to determinemore effective decision rules in such situations. Theprinciples of target analysis harmonize well withthose of tabu search, and the method also can beapplied in conjunction with many other procedures.

374 F. GLOVER
Its main features may briefly be sketched by viewingthe approach as a five-phase procedure, as follows.
Phase 1 of target analysis is devoted to applyingexisting methods to determine optimal or near-optimal solutions to representative problems from agiven class. This phase is straightforward in itsexecution, although a high level of effort may beexpended to assure the solutions are of the specifiedquality.
Phase 2 uses the solutions produced by Phase 1as targets, which become the focus of a new set ofsolution passes. During these passes, each problemis solved again, this time scoring all available moves(or a high-ranking subset) on the basis of theirability to progress effectively toward the targetsolution. (The scoring can be a simple classification,such as 'good' or 'bad'.) Choices may be biasedduring this phase to select moves that have highscores, thereby leading to the target solutions morequickly than the customary choice rules. Informa-tion generated during the solution effort, which maybe useful in inferring these scores, is stored for lateranalysis.
Phase 3 constructs parameterized functions ofthe information recorded in Phase 2, with the goalof finding values of the parameters to create amaster decision rule. This rule is designed to choosemoves that score highly according to the outcomesof the second phase.
Phase 4 generates a mathematical or statisticalmodel (such as a generalized goal programming ordiscriminate analysis model) to determine effectiveparameter values for the master decision rule. (Thesecond, third and fourth phases are not entirelydistinct, and may be iterative.) On the basis of theoutcomes of the Phase 4, the master decision rulebecomes the rule that drives the solution method.This rule itself may be evolutionary, i.e. it may usefeedback of outcomes obtained during the solutionprocess to modify its parameters for the problembeing solved.
Phase 5 concludes the process by applying themaster decision rule to the original representativeproblems and to other problems from the chosensolution class to confirm its merit. (The process canbe repeated and nested to achieve further refine-ment.)
Target analysis has an additional important func-tion. On the basis of the information generatedduring its application, and particularly during itsfinal confirmation phase, the method produces em-pirical frequency measures for the probabilities that
choices with high evaluations will lead to an op-timal (or near-optimal) solution within a certainnumber of steps. By this means, target analysis canprovide inferences concerning expected solutionbehavior, as a supplement to classical 'worst case'complexity analysis. These inferences can aid thepractitioner by indicating how long to run a solu-tion method to achieve a solution of desired quality(and with a specified empirical probability).
In combination with an effective heuristic frame-work such as tabu search, target analysis appears tooffer a promising foundation for further advances insolving difficult optimization problems.
Acknowledgement
This research has been supported in part by the NASA GrantNAGQ-1388 of the Center for Space Construction and by theAir Force Office Scientific Research and the Office of NavalResearch Contract # F49620-90-C-0033.
REFERENCES
J. Bovet, C. Constantin and D. de Werra (1987). A convoyscheduling problem. Research Report ORiVP 87/22,Swiss Federal Institute of Technology in Lausanne,December.
B. T. Eck (1989). Good solutions to job shop schedulingproblems via tabu search. Research Report, Depart-ment of Industrial Engineering and Operations Re-search, Columbia University, New York, May.
U. Faigle and W. Kern (1989). Some convergence resultsfor probabilistic tabu search. Research MemorandumNo. 882, Faculty of Applied Mathematics, Universityof Twente, The Netherlands, November.
C. Friden, A. Hertz and D. de Werra (1989). Stabulus: atechnique for finding stable sets in large graphs withtabu search. Computing 42, 35-44.
F. Glover (1986), Future paths for integer programmingand links to artiticial intelligence. Computers and Oper-ations Research 13, No. 5, 533-49.
F. Glover (1989a). Tabu search, part I. ORSA Journal onComputing 1, No. 3, 190-206.
F. Glover (1989b). Candidate list strategies and tabusearch. CAAl Research Report, University of Color-ado, Boulder, July.
F. Glover (1990). Tabu search, part II. ORSA Journal onComputing 2, No. I, 4-32.
F. Glover and H. J. Greenberg (1989). New approachesfor heuristic search: a bilateral linkage with artificialintelligence. European Journal of Operational Research39, No. 2, 119-30.
F. Glover and M, Laguna (1989). Target analysis toimprove a tabu search method for machine scheduling.Technical Report, Advanced Knowledge ResearchGroup, US West Advanced Technologies. Boulder,Colorado.
F. Glover and C. McMillan (1986). The general employeescheduling problem; an integration of management

TABU SEARCH 375
science and artificial intelligence. Computers and Oper-ations Research 13, No. 5, 563-93.
F. Glover, C. McMillan and B. Novick (1985). Interactivedecision software and computer graphics for architec-tural and space planning. Annals of Operations Re-search 5, C. Monma (ed) 557-73.
R. Glover, D. Klingman and N. V. Phillips (1989). Anetwork-related nuclear plant model with an intelli-gence branch-and-bound solution approach. Annals ofOR: Linkages with Artificial Intelligence.
P. Hansen and B. Jaumard (1987). Algorithms for themaximum satisfiability problem, RUTCOR ResearchReport RR # 43-87, Rutgers, NJ. June.
A. Hertz and D. de Werra (1987). Using tabu searchtechniques for graph coloring. Computing 29, 345-51.
A. Hertz and D. de Werra (forthcoming). The tabu searchmetaheuristic: how we used it. Annals of Mathematicsand Artificial Intelligence.
R. Hubscher and F. Glover (1990). Tabu search for binpacking. CAAI Research Report 90-4, University ofColorado, Boulder, September.
J. Knox (1989). The Application of Tabu Search to theSymmetric Traveling Salesman Problem, PhD thesis.Graduate School of Business, University of Colorado,July.
M. Laguna 11989). A tabu search method for schedulingjobs on parallel processors. Research Report, Depart-ment of Mechanical Engineering, University of Texas-Austin, May.
M. Laguna, J. W. Barnes and F. Glover (1989).Scheduling jobs with linear delay penalties and
sequence dependent setup costs using tabu search.Research Report, Department of Mechanical Engineer-ing, The University of Texas-Austin. April.
M. Malek, M. Guruswamy, H. Owens and M. Pandya(1989a). Serial and parallel search techniques for thetraveling salesman problem. Annals of OR: Linkageswith Artificial Intelligence.
M. Malek, M. Heap, R. Kapur and A. Mourad (1989b), Afault tolerant implementation of the traveling salesmanproblem. Research Report, Department of Electricaland Computer Engineering, University of Texas-Austin, May.
J, Ryan, S. Oliveira and G, Stroud (1989). A parallelversion of tabu search and the path assignment prob-lem. Heuristics for Combinatorial Optimization 1-24,
J. Skorin-Kapov (1990). Tabu search applied to thequadratic assignment problem. ORSA Journal on Com-puting 2:1, 33-45.
E. Taillard (1990). Robust taboo search for the quadraticassignment problem. Research Report ORWP 90/10,EPFL, DMA, Lausanne, Switzerland, June.
Ch. Wendelin (1988). Graph partitioning with the aid ofthe tabu method. Project Report, Institute fur HohereStudien, Vienna, Austria, June.
M. Windmer and A. Hertz, (forthcoming). A new ap-proach for solving the flowshop sequencing problem.European Journal of Operational Research.
D. WoodrufTand E. Zemel (1990). Hashing vectors fortabu search. Technical Report 90-08, Department ofI.E. and M.S., Northwestern University, July,
