architectural building blocks for plug-and-play system...
TRANSCRIPT
Architectural Building Blocks forPlug-and-Play System Design
Shangzhu Wang, George S. Avrunin,Lori A. Clarke
Department of Computer ScienceUniversity of Massachusetts Amherst
{shangzhu,avrunin,clarke}@cs.umass.edu
The Problem
Developing concurrent and distributedsystems is difficult and costly Unpredictable behaviors due to
interleavings between parallel components
Component Interactions Represent synchronizations and
communications between components
Large design space of alternative semantics A wide range of interaction mechanisms (e.g. RPC, MP,
EBN) and their variations Choosing appropriate interaction semantics for a system
can be challenging
Important yet hard to get right
Semantics of interactions intertwined withcomponents’ computations
Changes in the interaction semantics often requirechanges in the components, limiting the reusability ofcomponents
State of the Practice/Art Connectors represent component interactions
Finite-state verification can be used to evaluatethe correctness of design Provides early feedback about the appropriateness of
the choices of interaction semantics
ADLs are often restricted in the kinds of interactionsemantics they support
Component designs tend to include some aspects ofthe semantics of interactions
But extremely costly when frequent changes are madeto the design
An Illustrative Example
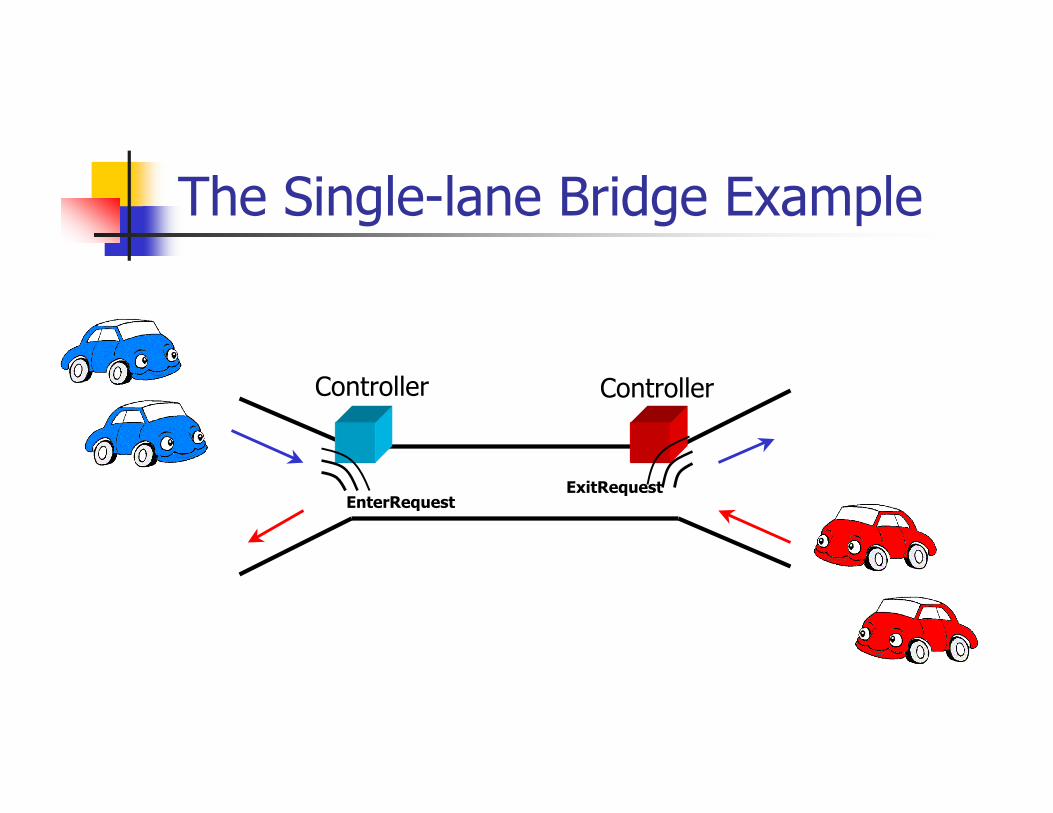
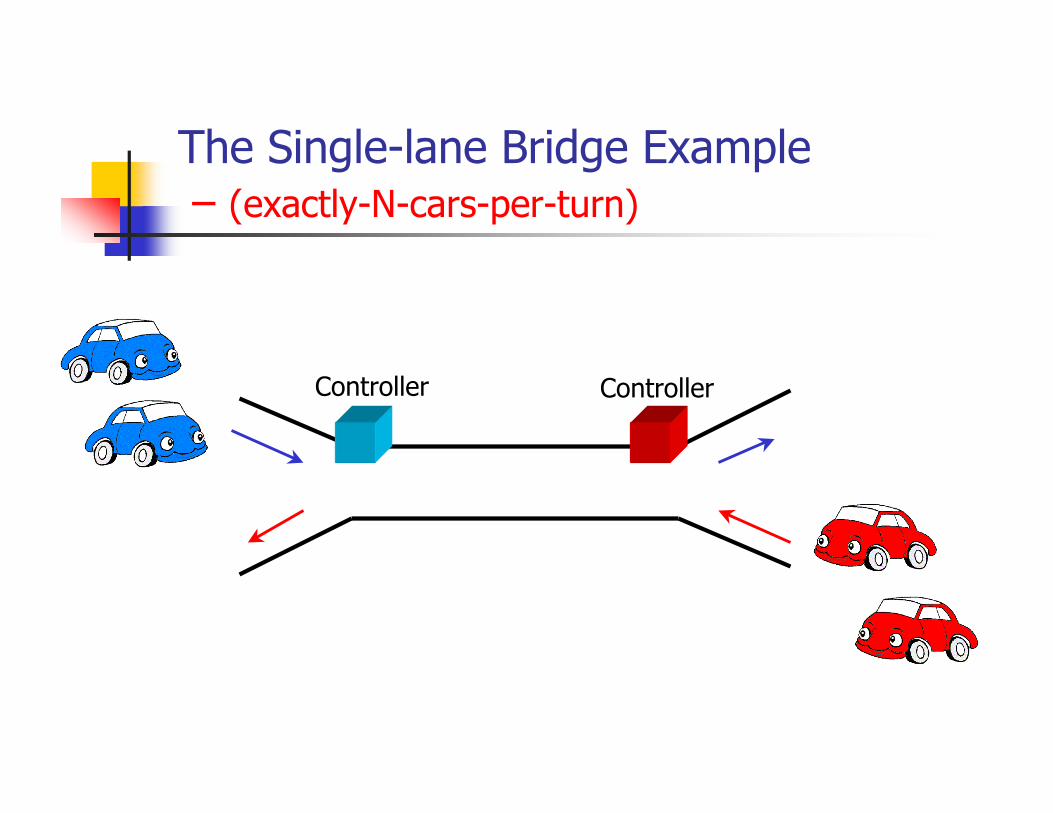
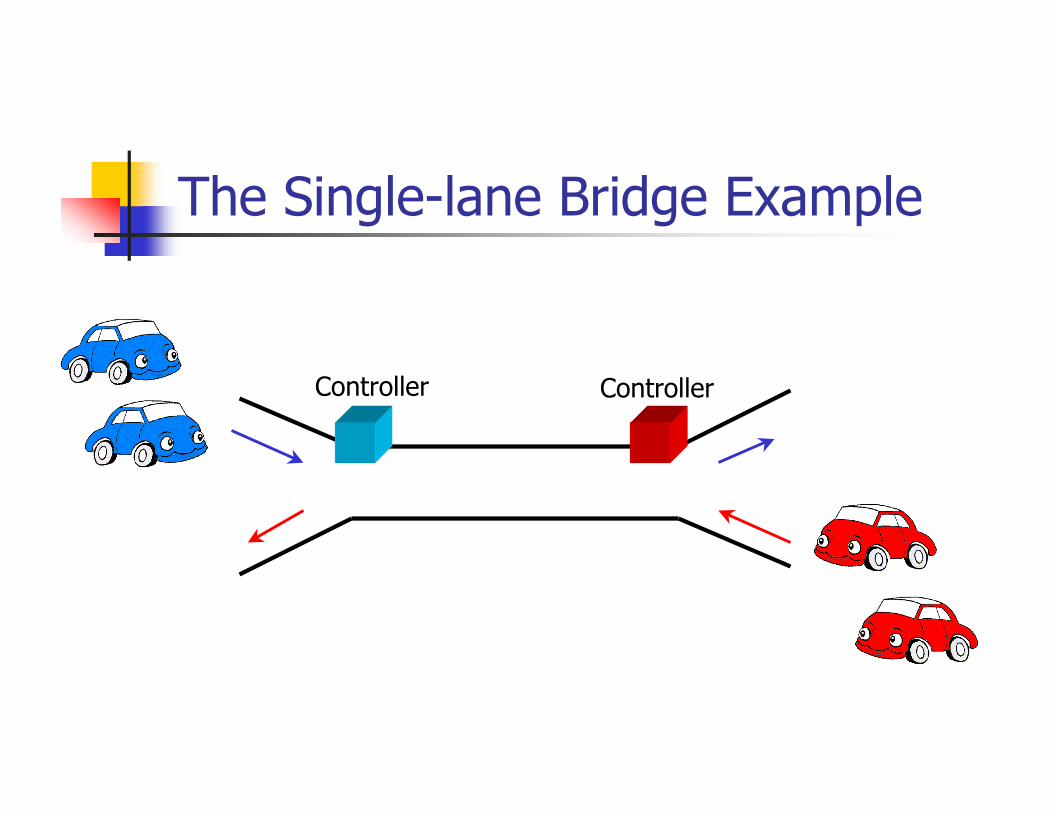
The Single-lane Bridge Example
Controller Controller
EnterRequestExitRequest
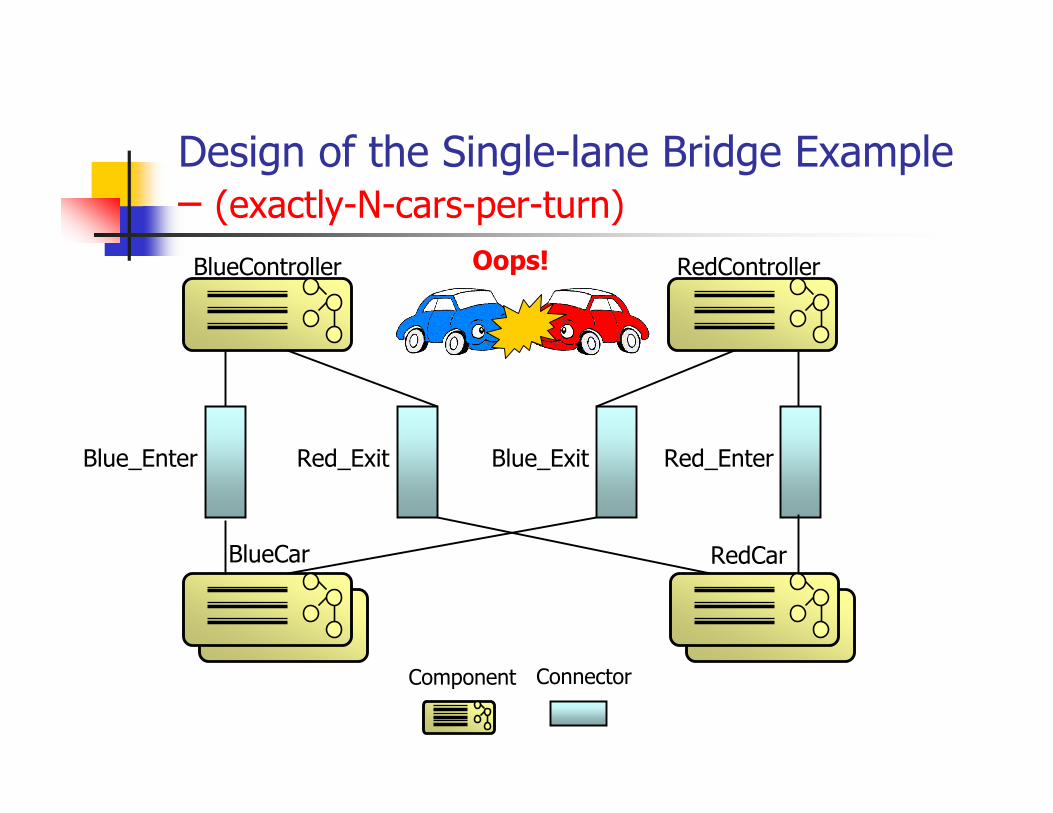
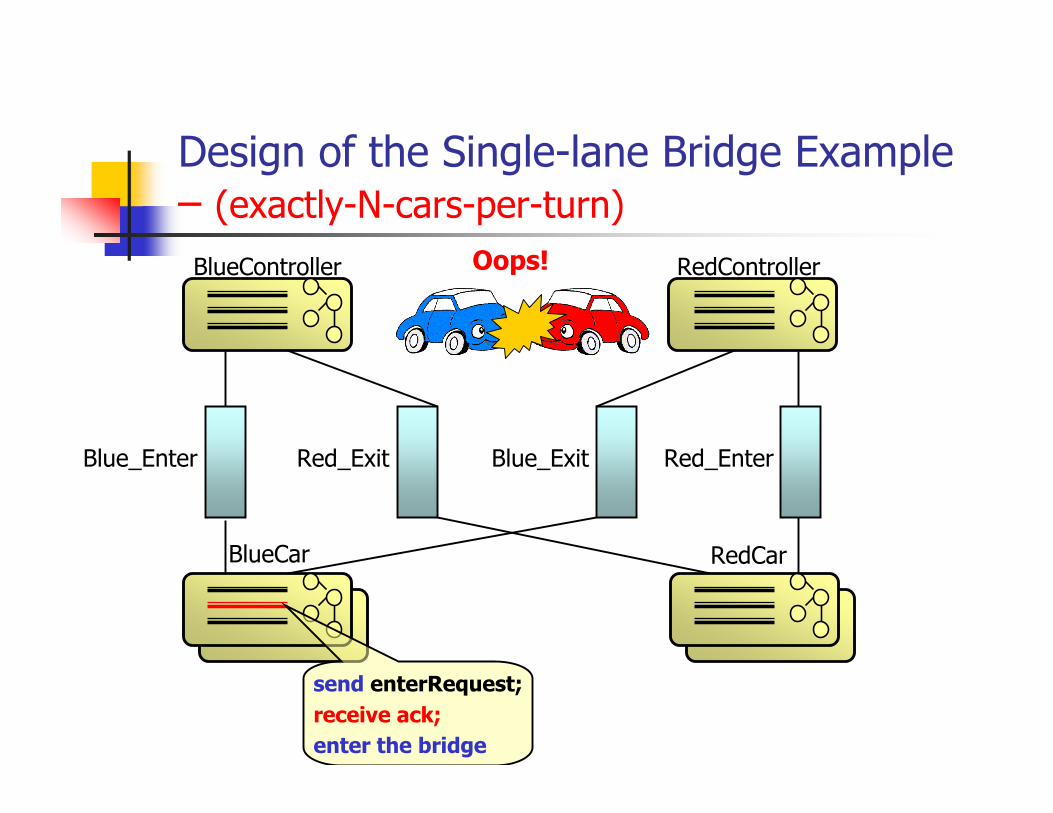
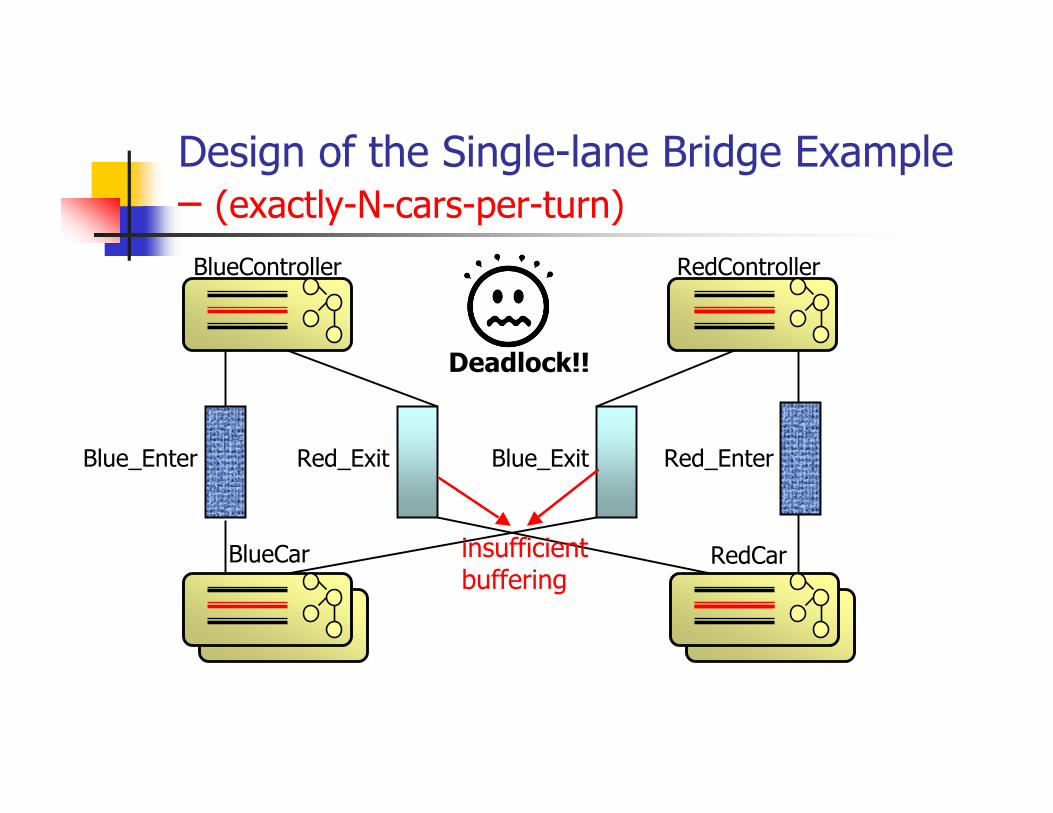
Design of the Single-lane Bridge Example– (exactly-N-cars-per-turn)
BlueController RedController
BlueCar RedCar
Component Connector
Blue_Enter Red_Exit Blue_Exit Red_Enter
Oops!
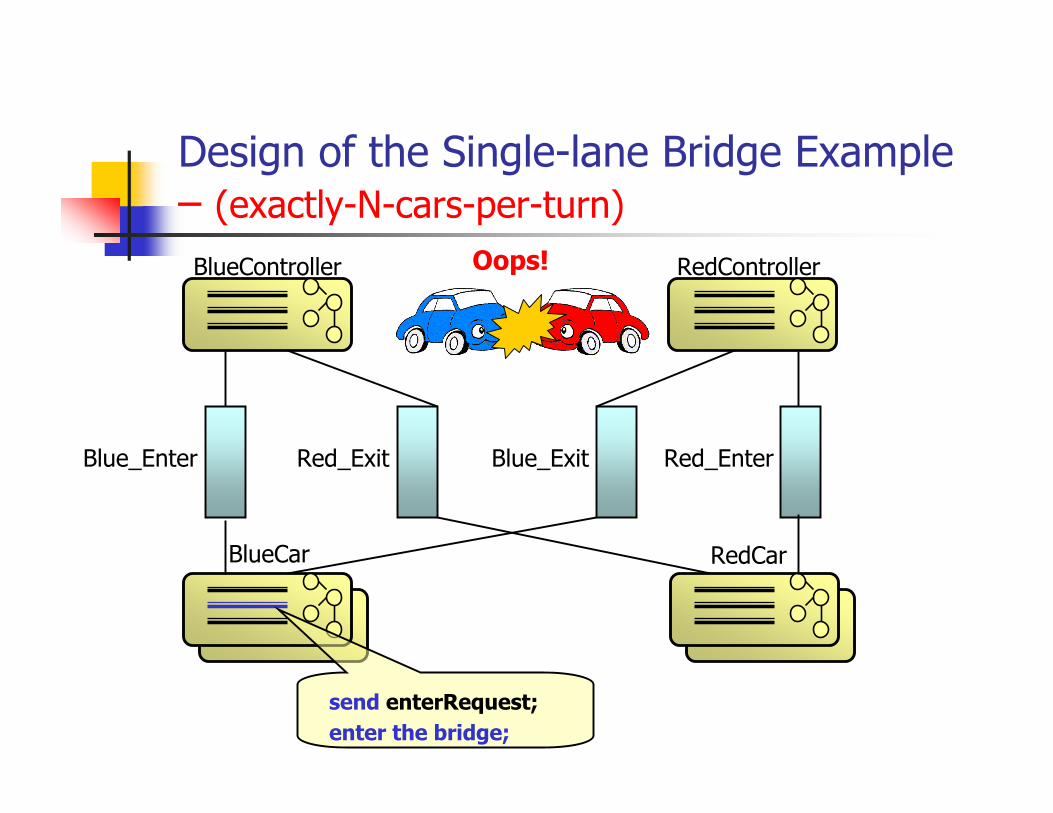
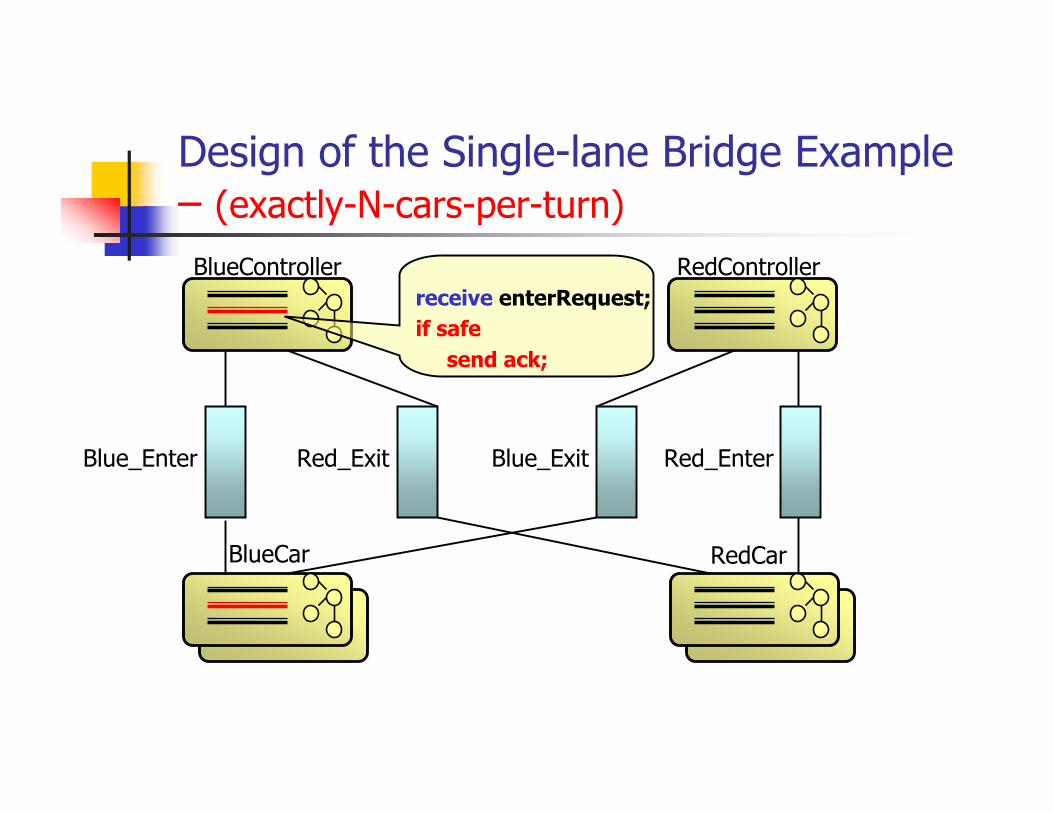
Design of the Single-lane Bridge Example– (exactly-N-cars-per-turn)
RedController
BlueCar RedCar
Blue_Enter Red_Exit Blue_Exit Red_Enter
send enterRequest;enter the bridge;
BlueController Oops!
Design of the Single-lane Bridge Example– (exactly-N-cars-per-turn)
RedController
BlueCar RedCar
Blue_Enter Red_Exit Blue_Exit Red_Enter
send enterRequest;receive ack;enter the bridge
BlueController Oops!
Design of the Single-lane Bridge Example– (exactly-N-cars-per-turn)
RedController
BlueCar RedCar
Blue_Enter Red_Exit Blue_Exit Red_Enter
BlueControllerreceive enterRequest;if safe send ack;
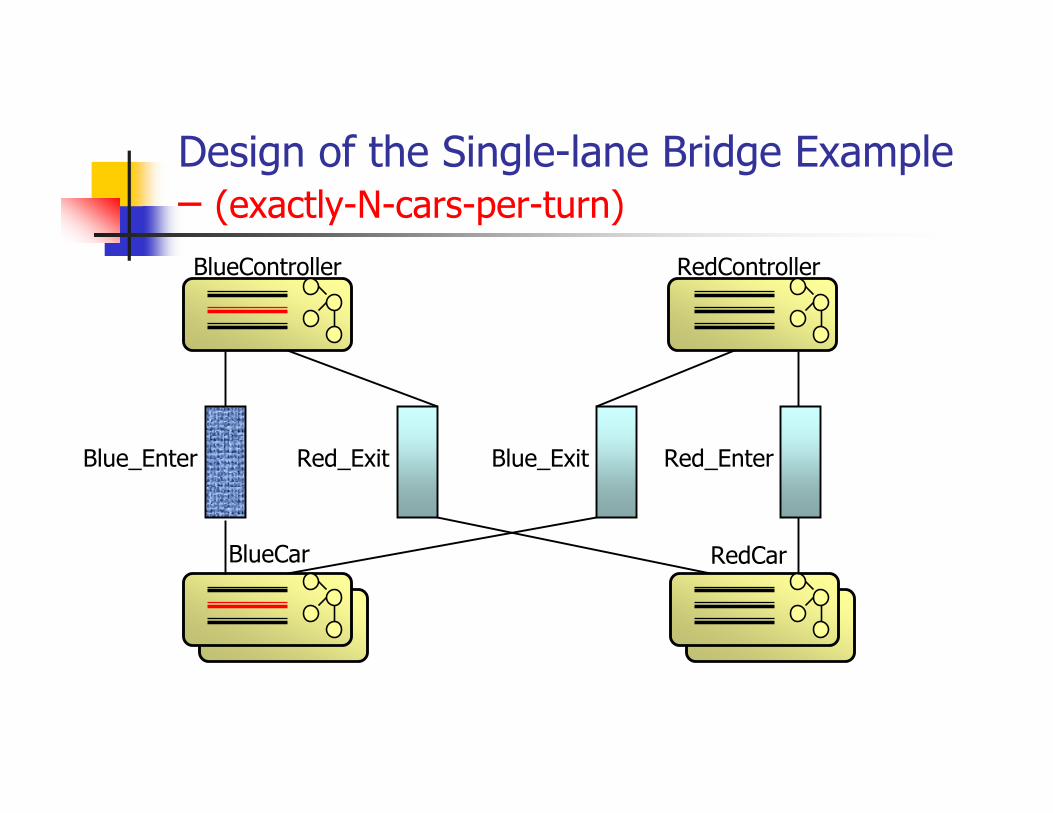
Design of the Single-lane Bridge Example– (exactly-N-cars-per-turn)
RedController
BlueCar RedCar
Blue_Enter Red_Exit Blue_Exit Red_Enter
BlueController
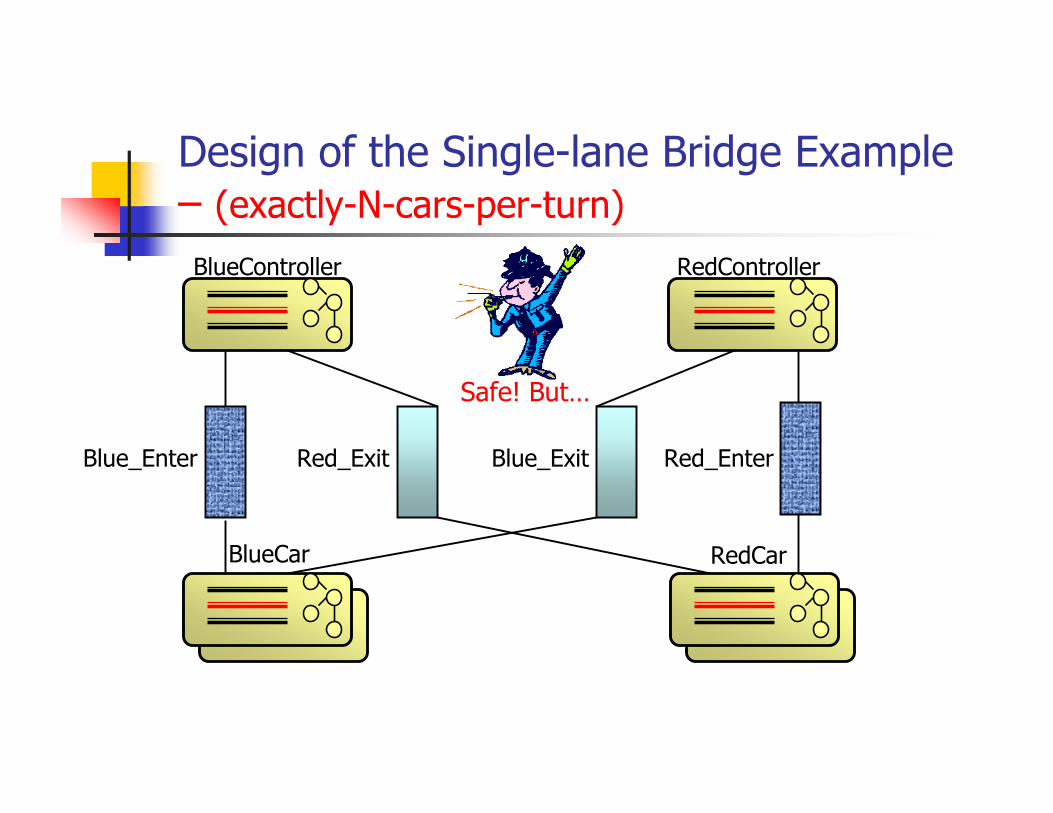
Design of the Single-lane Bridge Example– (exactly-N-cars-per-turn)
RedController
BlueCar RedCar
Blue_Enter Red_Exit Blue_Exit Red_Enter
BlueController
Safe! But…
Design of the Single-lane Bridge Example– (exactly-N-cars-per-turn)
RedController
BlueCar RedCar
Blue_Enter Red_Exit Blue_Exit Red_Enter
BlueController
Deadlock!!
insufficient buffering
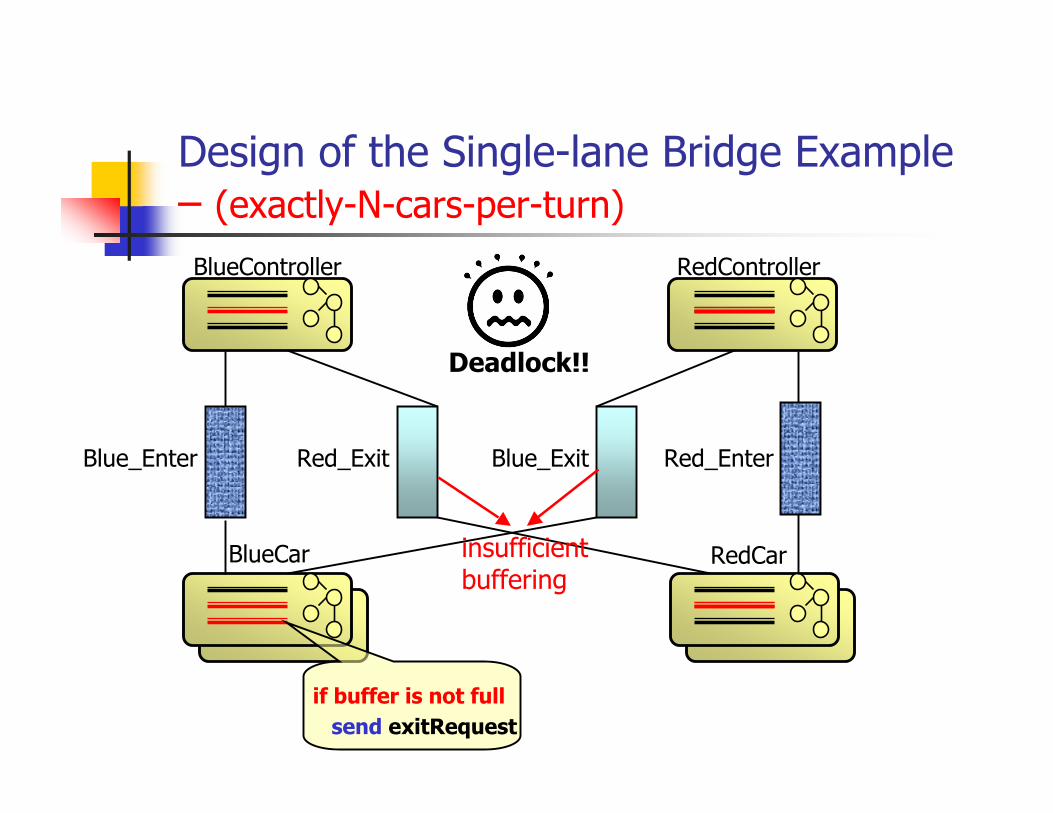
Design of the Single-lane Bridge Example– (exactly-N-cars-per-turn)
RedController
BlueCar RedCar
Blue_Enter Red_Exit Blue_Exit Red_Enter
BlueController
Deadlock!!
insufficient buffering
if buffer is not full send exitRequest
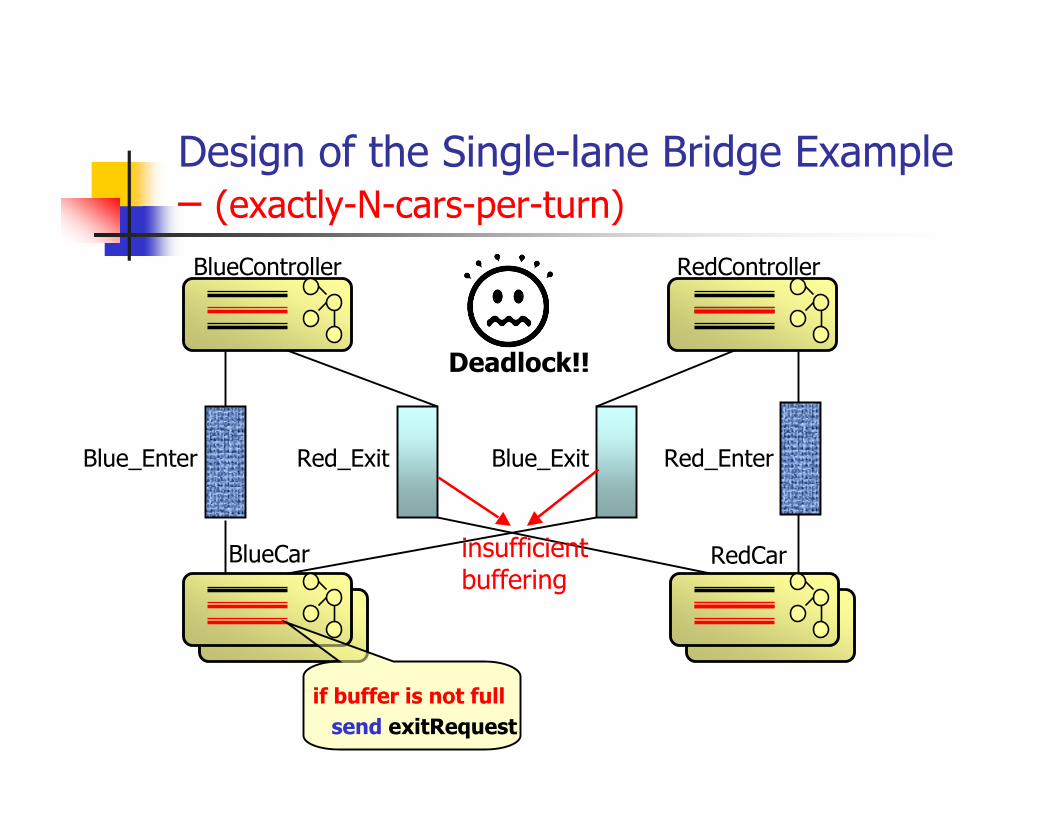
Design of the Single-lane Bridge Example– (exactly-N-cars-per-turn)
RedController
BlueCar RedCar
Blue_Enter Red_Exit Blue_Exit Red_Enter
BlueController
if buffer is not full send exitRequest
insufficient buffering
Deadlock!!
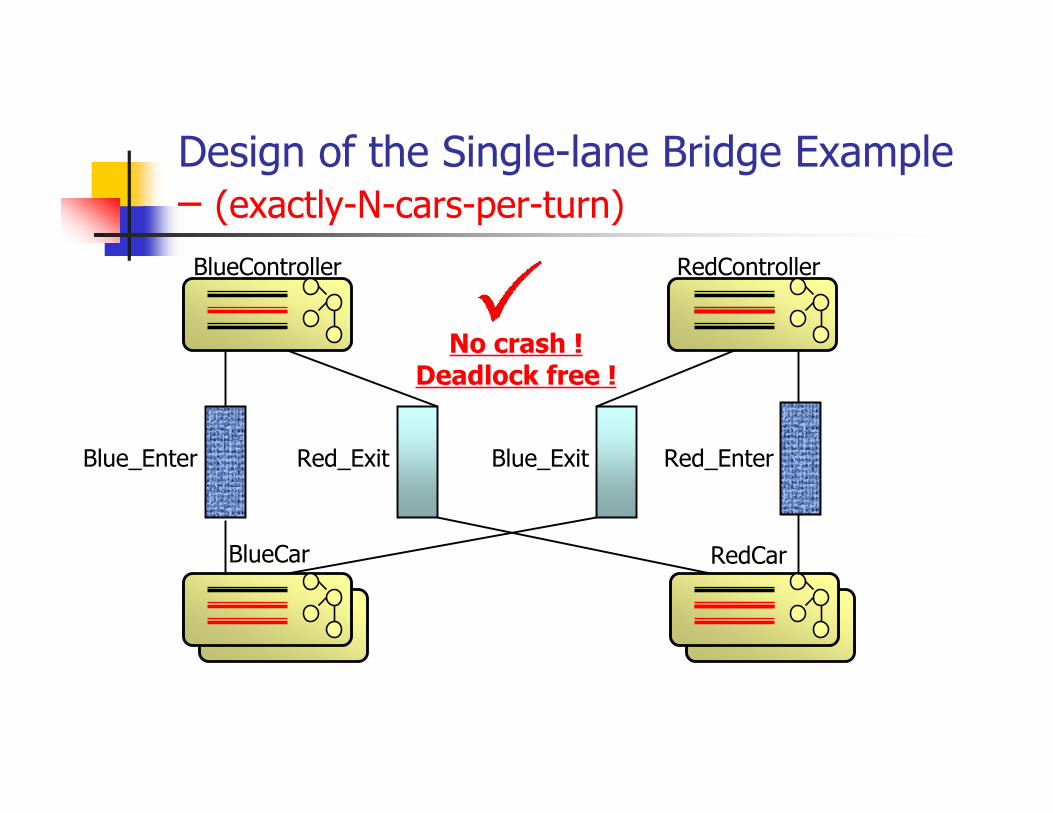
Design of the Single-lane Bridge Example– (exactly-N-cars-per-turn)
RedController
BlueCar RedCar
Blue_Enter Red_Exit Blue_Exit Red_Enter
BlueController
No crash !Deadlock free !

What is Needed
Architectural support to Minimize the impact on the components when
connectors are changed Allow easy experimentation with alternative design
choices of interaction semantics Increase the reusability of both components and
connectors Reduce the cost of frequently re-computing models for
finite-state verification
Outline of Our Approach Support plug-and-play system design
Define a small set of standard interfaces fordifferent component interactions
Define a library of building blocks for theconstruction of connectors with differentinteraction semantics
Facilitate design-time verification Increase reusability of component models Build connector models by composing reusable
models of building blocks
Standard Interfaces forComponent Interactions
Only a small set of interfaces are needed Define the standard protocols between
components and connectors
The same interface can be used with manydifferent interaction semantics Connectors can be modified or replaced without
changing the components Components are more likely to be reused when
the design of interactions is changed
A Library of Building Blocks
Connectors are decomposed into channelsand ports Composable and reusable Channels represent the communication media of
connectors Ports are mediators between components and
channels capture different synchronization semantics of
connectors important for supporting the standard component
interfaces
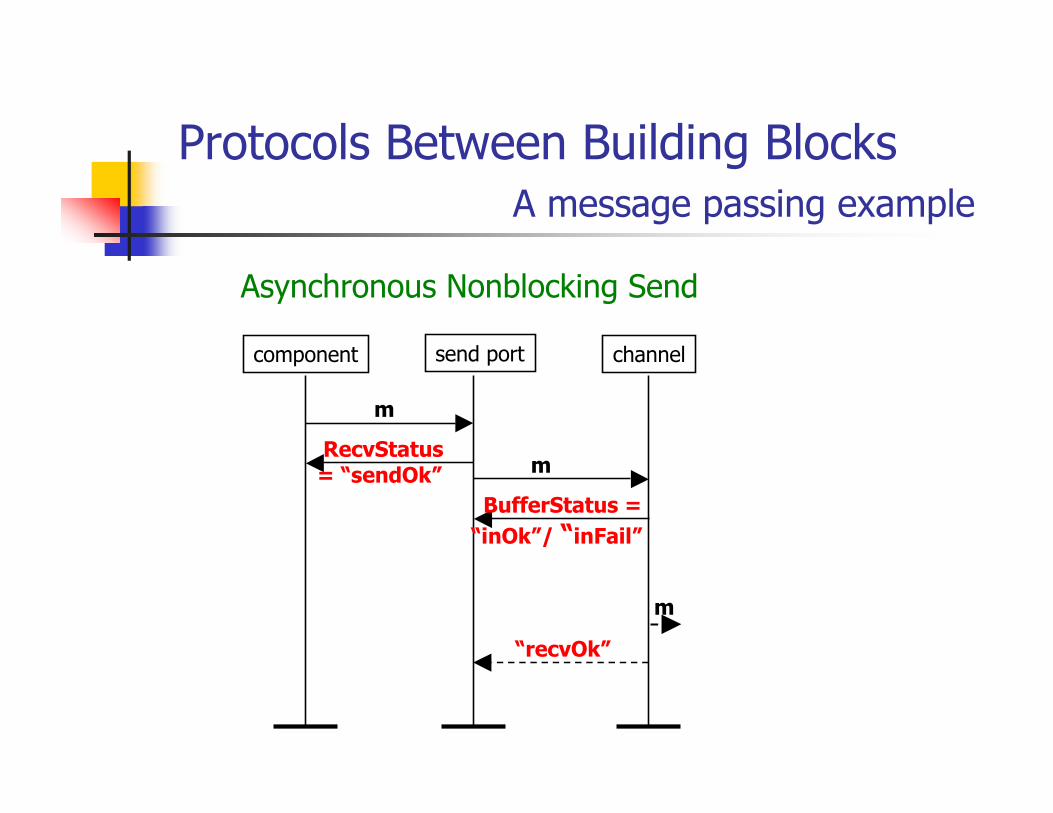
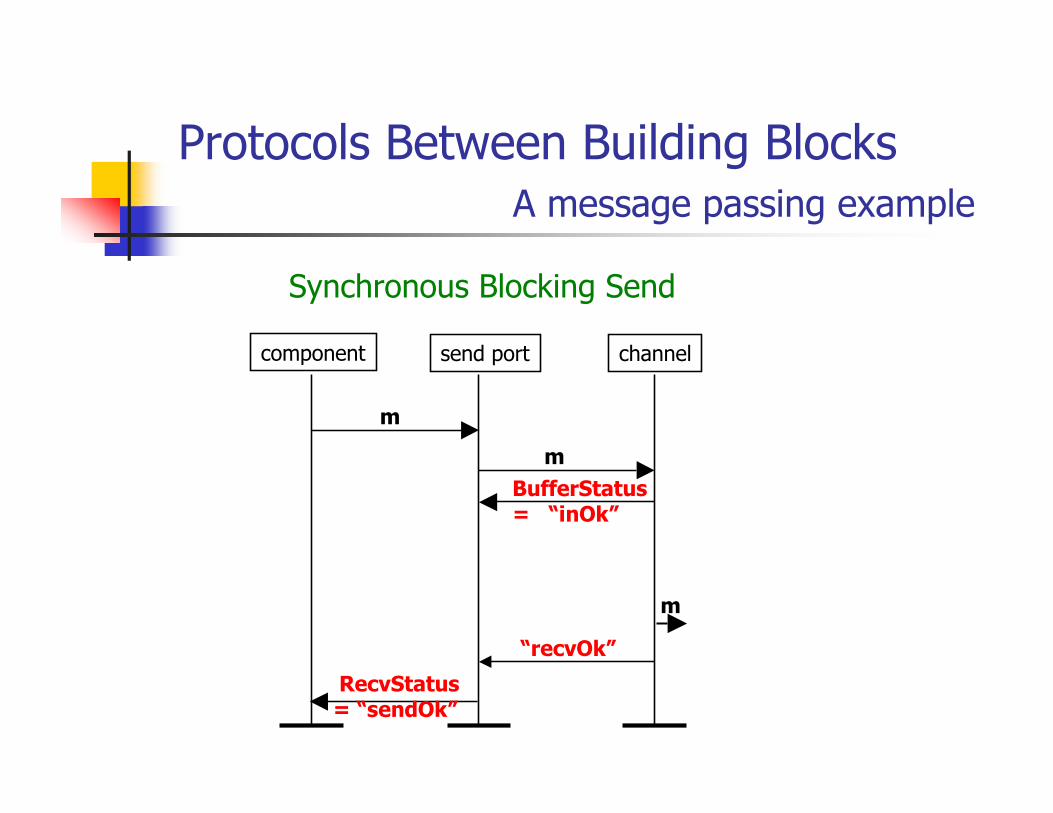
Protocols Between Building Blocks A message passing example
Asynchronous Nonblocking Send
component channelsend port
m
m
BufferStatus = “inOk”/ “inFail”
RecvStatus= “sendOk”
“recvOk”
m
RecvStatus= “sendOk”
component channelsend port
m
mBufferStatus = “inOk”
m
Protocols Between Building Blocks A message passing example
Synchronous Blocking Send
“recvOk”
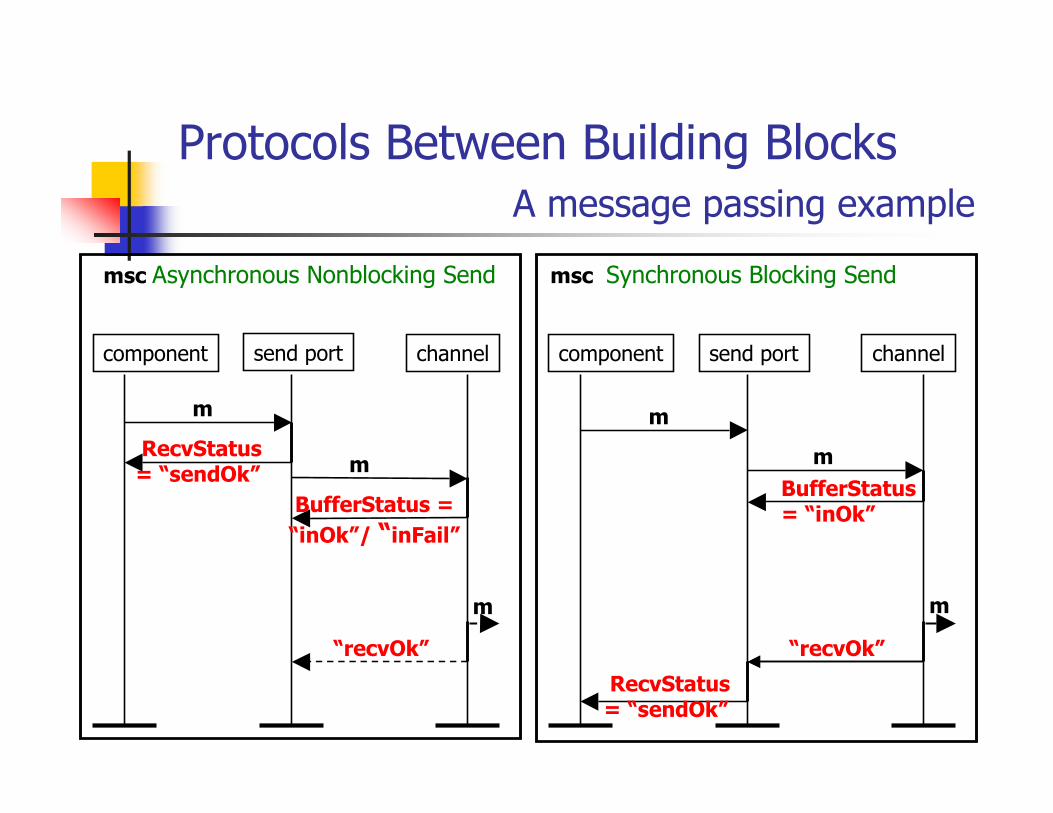
msc Asynchronous Nonblocking Send
component channelsend port
m
m
BufferStatus = “inOk”/ “inFail”
RecvStatus= “sendOk”
m
“recvOk”
msc Synchronous Blocking Send
component channelsend port
m
mBufferStatus = “inOk”
“recvOk”
m
RecvStatus= “sendOk”
Protocols Between Building Blocks A message passing example
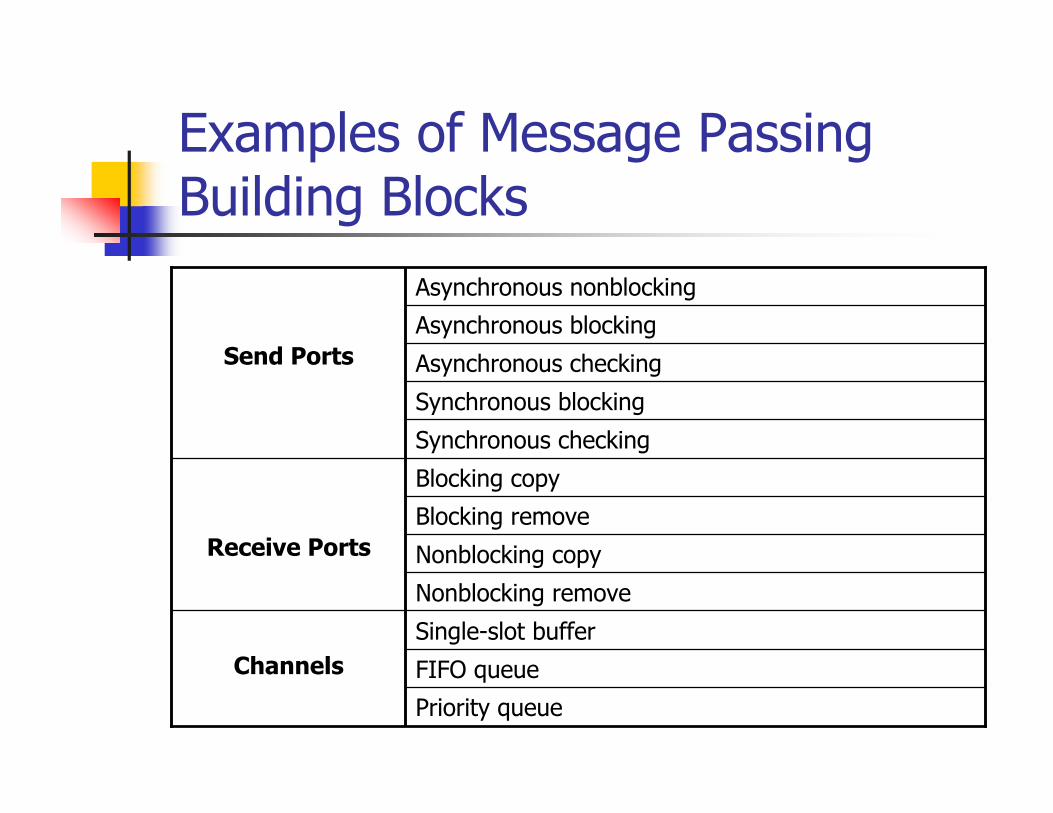
Examples of Message PassingBuilding Blocks
Priority queue
FIFO queueChannelsSingle-slot buffer
Nonblocking remove
Nonblocking copy
Blocking removeReceive Ports
Blocking copy
Synchronous checking
Synchronous blocking
Asynchronous checkingSend PortsAsynchronous blocking
Asynchronous nonblocking
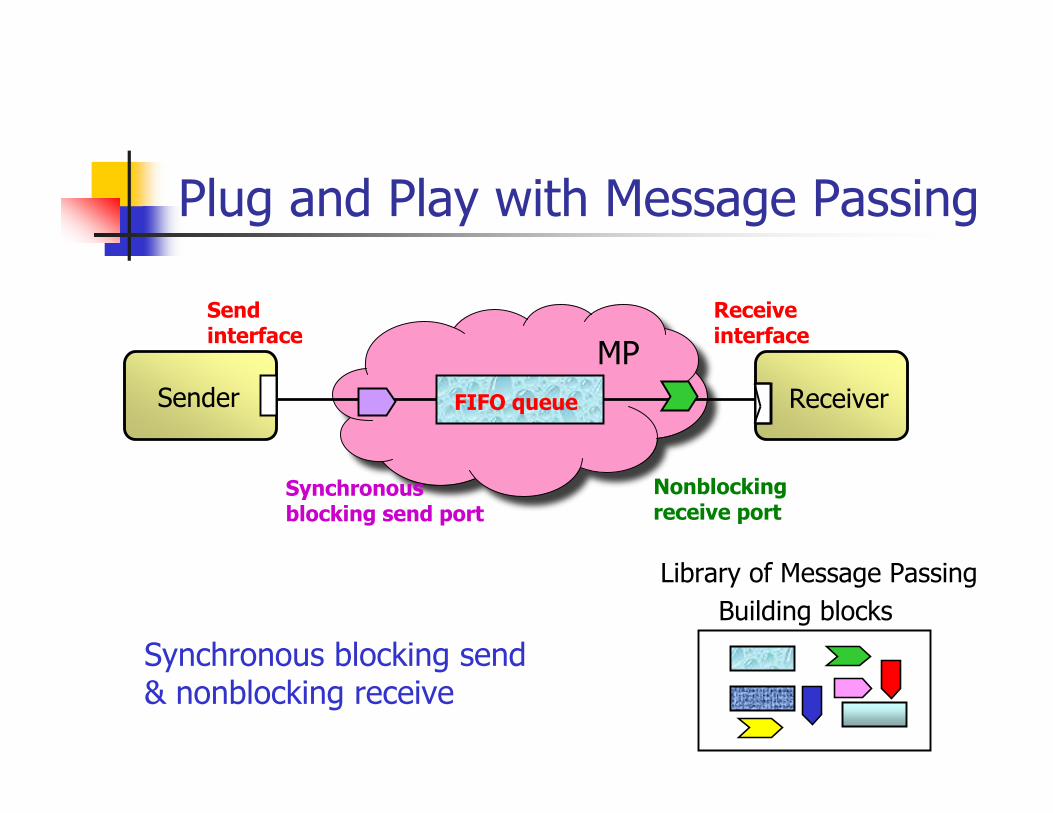
Sender Receiver
Plug and Play with Message Passing
MP
Synchronous blocking send & nonblocking receive
Nonblockingreceive port
FIFO queue
Synchronousblocking send port
Sendinterface
Receiveinterface
Library of Message Passing Building blocks
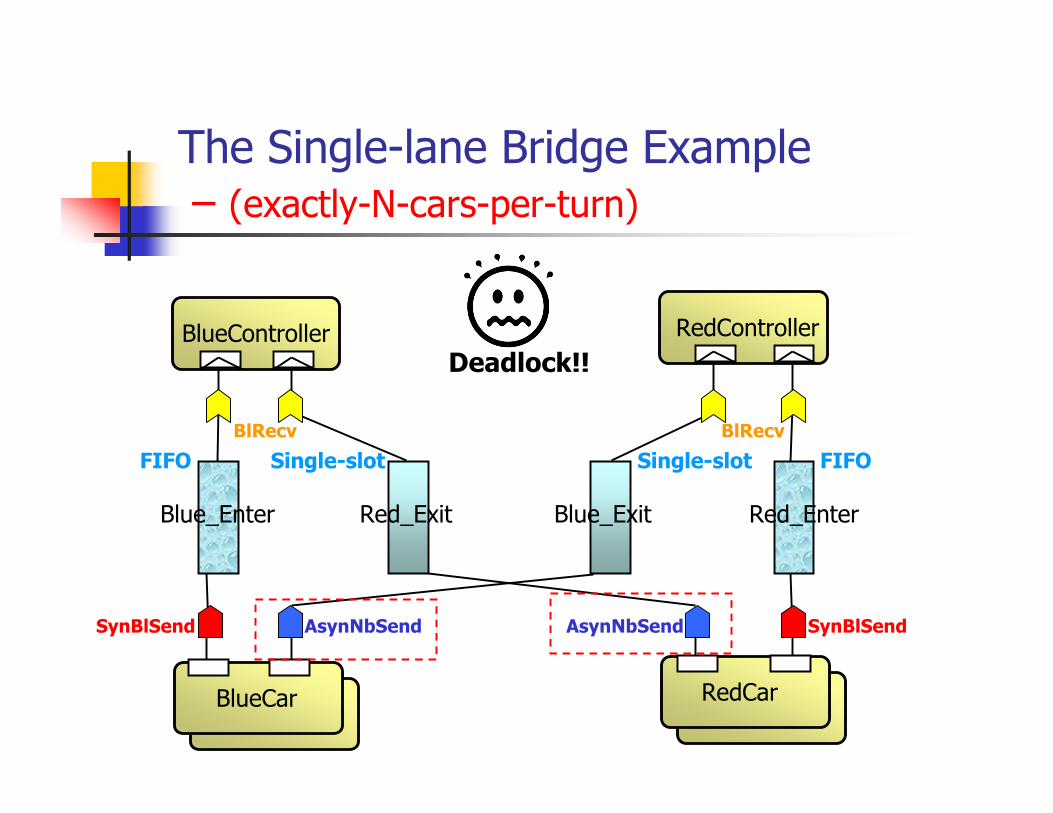
The Single-lane Bridge Example – (exactly-N-cars-per-turn)
Controller Controller
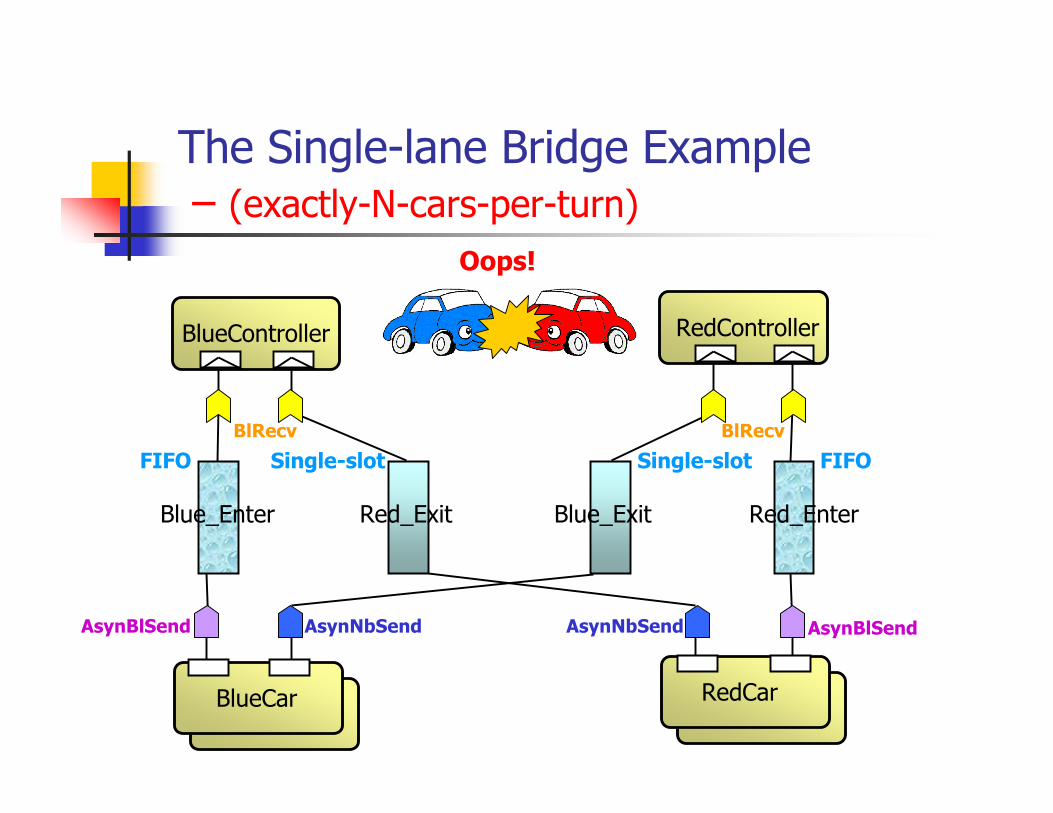
The Single-lane Bridge Example – (exactly-N-cars-per-turn)
RedController
RedCar
BlueController
BlueCar
Red_Exit
Single-slot
AsynNbSend
BlRecv
Blue_Exit
AsynNbSend
Single-slot BlRecv
Blue_Enter
FIFO
AsynBlSend
FIFO
AsynBlSend
Red_Enter
Oops!
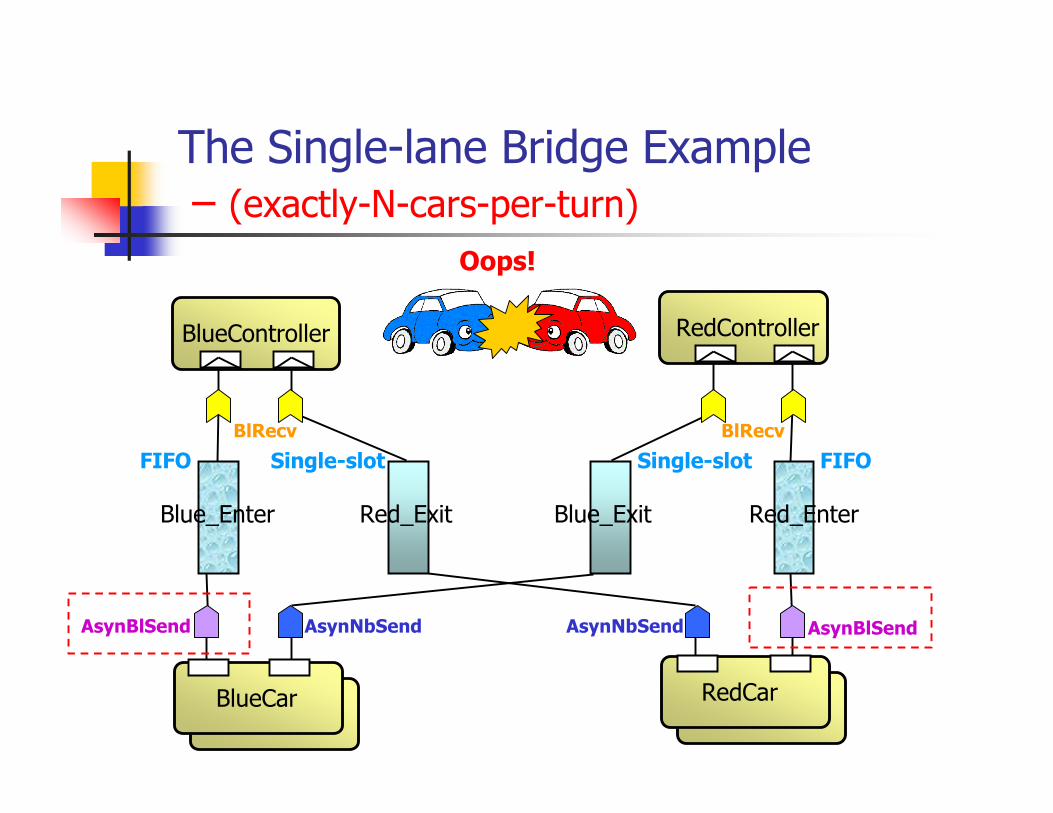
The Single-lane Bridge Example – (exactly-N-cars-per-turn)
RedController
RedCar
Blue_Enter Red_Exit Blue_Exit Red_Enter
BlueController
BlueCar
AsynNbSend
FIFO FIFOSingle-slot Single-slot
AsynNbSend
BlRecv BlRecv
AsynBlSendAsynBlSend
Oops!
SynBlSendSynBlSend
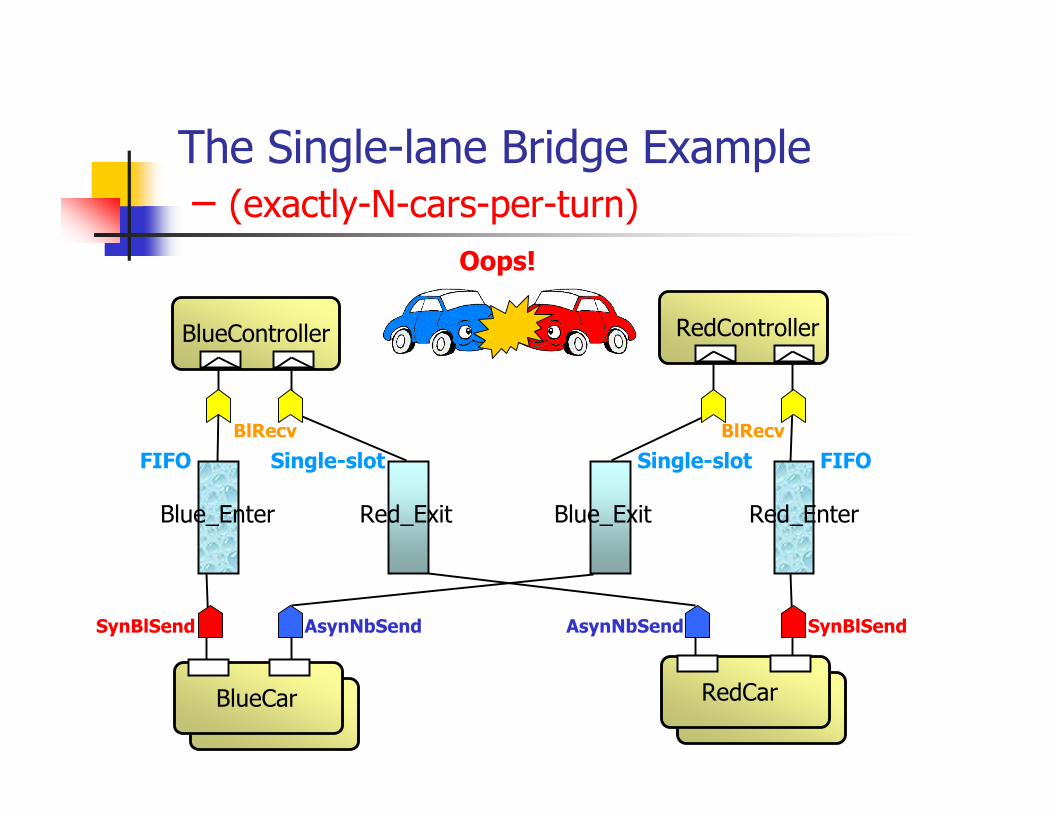
The Single-lane Bridge Example – (exactly-N-cars-per-turn)
RedController
RedCar
Blue_Enter Red_Exit Blue_Exit Red_Enter
BlueController
BlueCar
AsynNbSend
FIFO FIFOSingle-slot Single-slot
AsynNbSend
BlRecv BlRecv
Oops!
SynBlSendSynBlSend
The Single-lane Bridge Example – (exactly-N-cars-per-turn)
RedController
RedCar
Blue_Enter Red_Exit Blue_Exit Red_Enter
BlueController
BlueCar
AsynNbSend
FIFO FIFOSingle-slot Single-slot
AsynNbSend
BlRecv BlRecv
Deadlock!!
SynBlSendSynBlSend
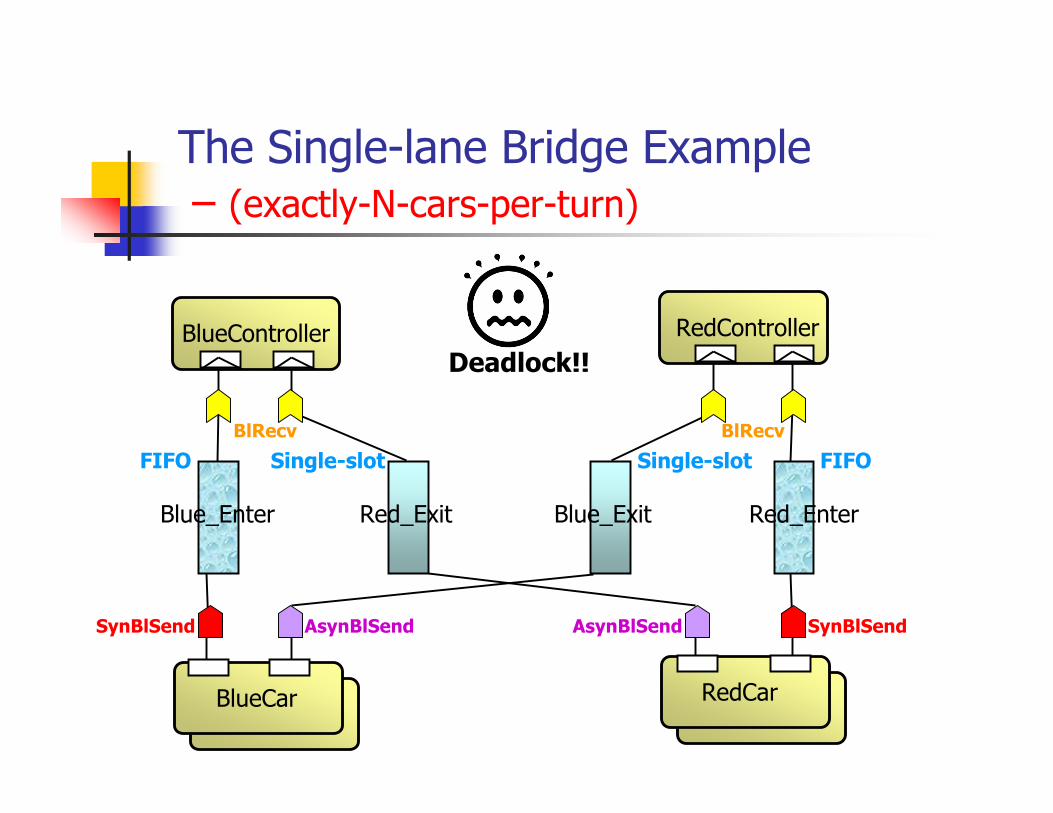
The Single-lane Bridge Example – (exactly-N-cars-per-turn)
RedController
RedCar
Blue_Enter Red_Exit Blue_Exit Red_Enter
BlueController
BlueCar
AsynBlSend
FIFO FIFOSingle-slot Single-slot
AsynBlSend
BlRecv BlRecv
Deadlock!!
A More Efficient Single-lane Bridge– (at-most-N-cars-per-turn)
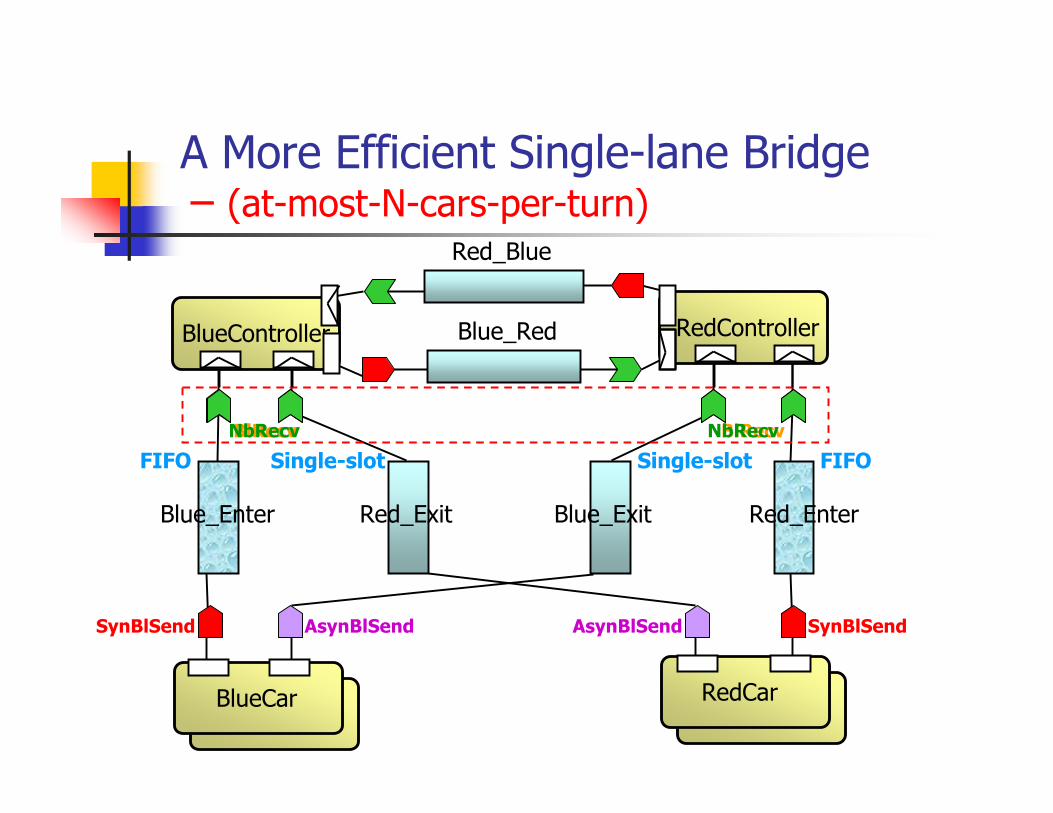
Red_Blue
Blue_Red
A More Efficient Single-lane Bridge
RedController
RedCar
Blue_Enter Red_Exit Blue_Exit Red_Enter
BlueController
BlueCar
SynBlSendAsynBlSend
FIFO FIFOSingle-slot Single-slot
SynBlSend AsynBlSend
BlRecv BlRecv
– (at-most-N-cars-per-turn)
NbRecv NbRecv
Summary Support plug-and-play design of component-
based systems A small set of standard component interfaces that
minimize the impact of changes to connectors oncomponents
A library of pre-defined building blocks for theconstruction of a variety of different connectors
Allows easy experimentation with alternative designchoices of interaction semantics
Facilitate design-time verification Increase the reusability of both components and
connectors Save model-construction time when verification needs
to be repeated
Summary (cont’d) Applied to message passing
Interfaces and protocols designed Building blocks defined and models constructed in
Promela Example systems evaluated using SPIN
Not tied to particular modeling languages or verification tools
Developing more building blocks to supportother interaction mechanisms RPC, Publish/Subscribe Can reuse many of the message passing building
blocks
Related Work Modeling connectors for verification, e.g.,
Wright (Allen et al. ’97) AIDS (Ray et al. ’03) Constraint Automata (Arbab et al. ’04) Model checking pub-sub systems (Garlan et al. ’03) Compositional approach (Caporuscio et al. ’04)
Architecture evolution, e.g., Medvidovic et al. ’99, van der Hoek et al. ’01
Ports, e.g., ACME (Garlan et al. ’97), ArchJava (Aldrich et al. ’02)
Mediators, wrappers, adaptable components, e.g., Sullivan et al. ’92, Spitznagel et al. ’03, , Heineman ’98
Ongoing & Future Work Support for additional interaction semantics
Provide a shared library of building blocks for different interactionmechanisms
Define a systematic way to create and define arbitrary buildingblocks
Tools to support our approach Implementing extensions to AcmeStudio (Garlan, et al.) Hierarchical building blocks, pre-built connectors Integrating design-time verification, provides guidance for fixing
problems More substantial case studies
To evaluate applicability, scalability, etc. Optimizations for finite-state verification
To reduce composed models

Thank you!
Questions?
The Single-lane Bridge Example
Controller Controller
The Single-lane Bridge Example Plug-and-play design using the pre-defined message
passing building blocks Connectors are described by composing a selective subset of
the message passing building blocks Allows easy experimentation with alternative choices of
message passing semantics Evaluate the system design using SPIN/Promela
Check properties: Is the system deadlock free? Is the bridge “safe”?
Our approach increases the reuse of the formal modelswhen designs need to be changed due to property violationsor major functional requirements changes
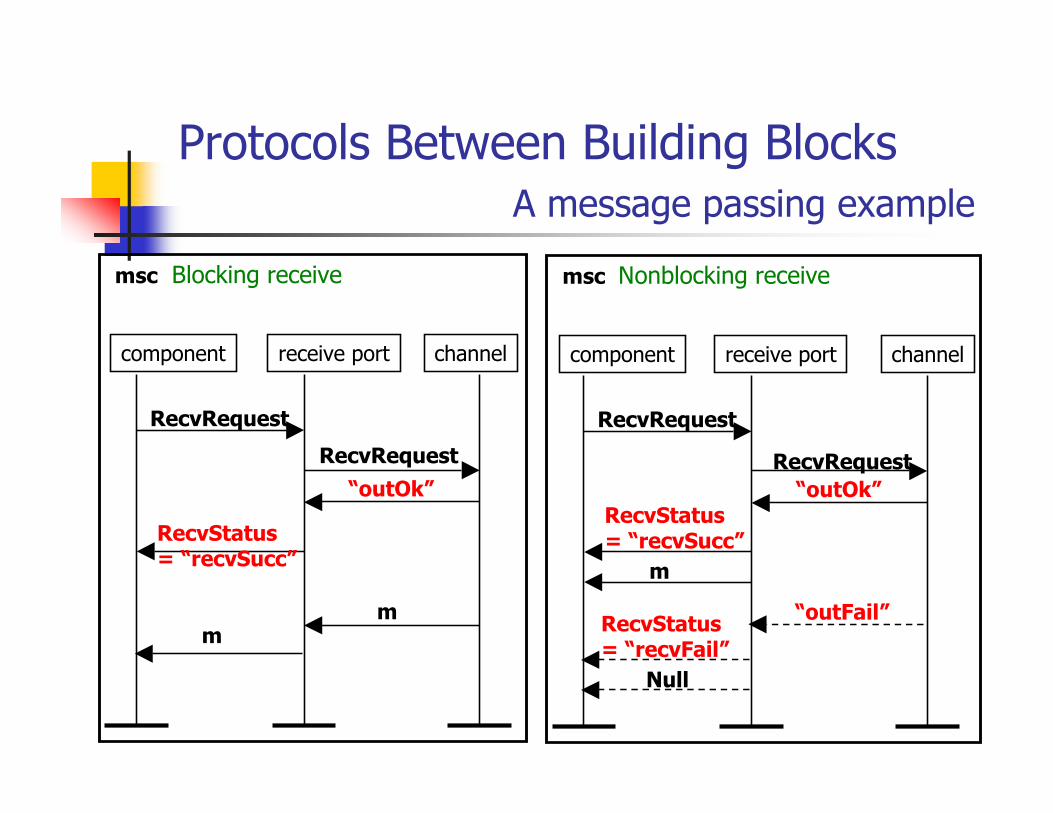
msc Blocking receive
component channelreceive port
RecvRequest
“outOk”
m
RecvStatus = “recvSucc”
RecvRequest
m
msc Nonblocking receive
component channelreceive port
RecvRequest
“outOk”RecvStatus = “recvSucc”
RecvRequest
m
“outFail”RecvStatus = “recvFail”
Null
Protocols Between Building Blocks A message passing example

Design-time Verification Finite-state verification
Check important specification properties of a system Based on searching the state space of a finite-state model of
a system for paths leading to the violation of the property E.g. SPIN, SMV, FLAVERS
Predefined and reusable formal models are createdfor the library of building blocks Connector models are composed from the predefined
building block models Not tied to any particular verification tools or modeling
languages Reduce the need of re-constructing component
models when only connectors are changed
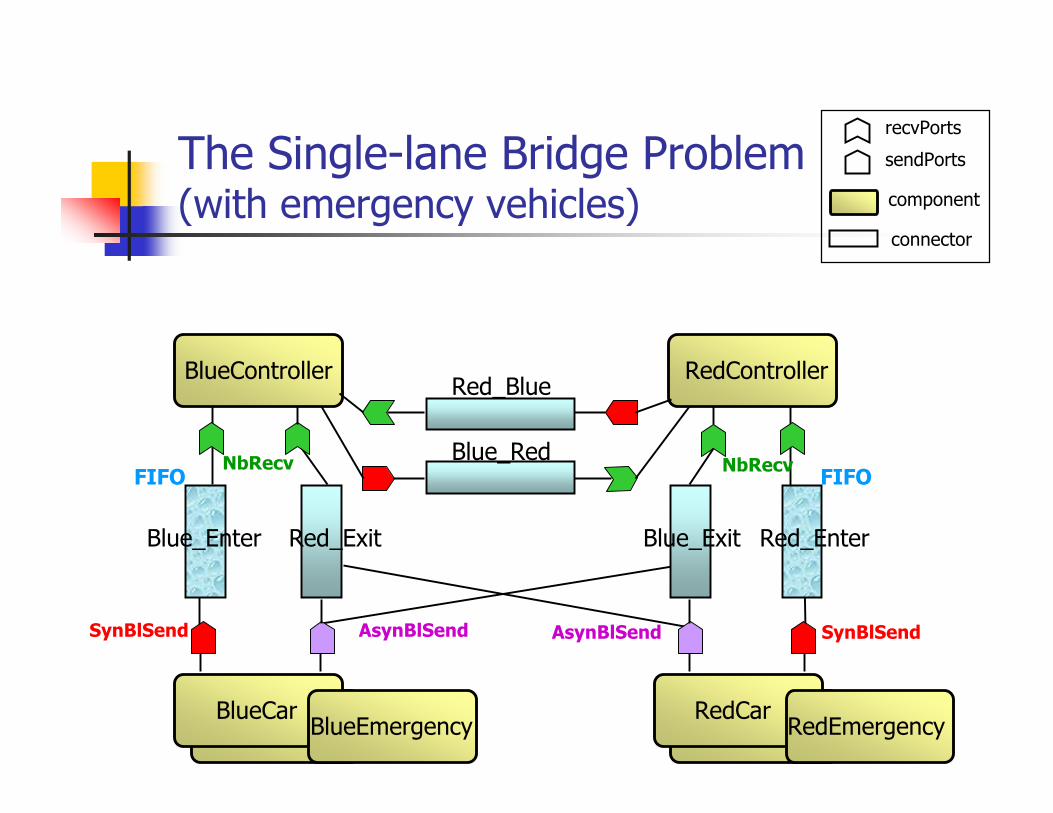
The Single-lane Bridge Problem(with emergency vehicles)
RedController
RedCar
Blue_Enter Red_Exit Blue_Exit Red_Enter
BlueController
BlueCar
connector
component
sendPorts
recvPorts
Red_Blue
Blue_RedFIFO FIFO
RedEmergencyBlueEmergency
AsynBlSend
NbRecv
SynBlSend
NbRecv
AsynBlSend SynBlSend
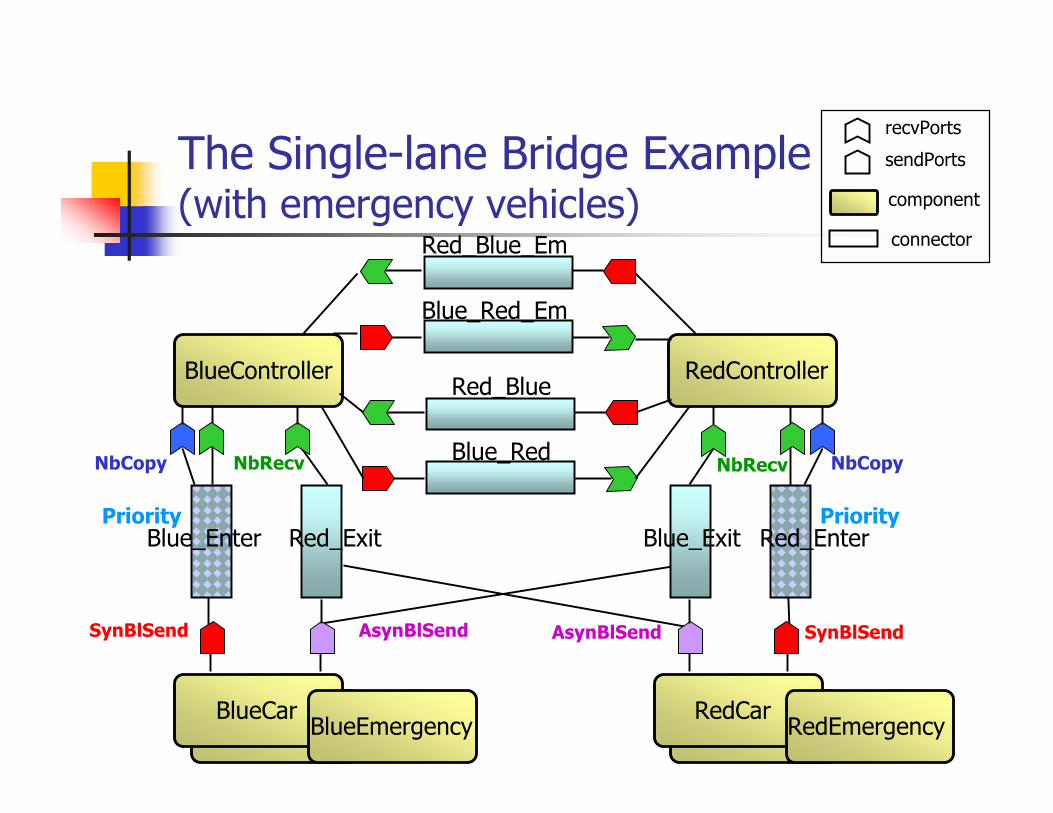
The Single-lane Bridge Example(with emergency vehicles)
RedController
RedCar
Red_Exit Blue_Exit
BlueController
BlueCar
connector
component
sendPorts
recvPorts
Red_Blue
Blue_Red
Priority Priority
RedEmergencyBlueEmergency
AsynBlSend
NbRecv
SynBlSend
NbRecv
AsynBlSend SynBlSend
Red_Blue_Em
Blue_Red_Em
Red_EnterBlue_Enter
NbCopy NbCopy
Notes
Refer details to the paper in the talk Refer verification-specific details to the
tech report
Related workInteraction Paradigms Paradigms for process interaction in distributed programs
[’91 Andrews] Paradigms for multithreaded, parallel, and distributed
programming, e.g. [’00 Andrews] Message Passing Interface (MPI) Etc.
Middleware Polylith [’94 Purtillo, et al.] CORBA COM Enterprise Java Beans Mediators [’94 Sullivan] etc.

Related workComponent-based ADLs Darwin [’97 Magee,et al.]
UniCon [’96 Shaw, et al.]
Wright [’97 Allen and Garlan]
ACME [’97 Garlan, et al.] A comparison framework for ADLs
[’00 Medvidovic, et al] etc.
Related work
Formalizing interactions and connections A formal basis for architectural connection
[’97 Allen and Garlan] Composable semantics [’02 Niu, et al.] Compositional connector wrappers
[’03 Spitznagel and Garlan] etc.
Related workApply finite state verification to component
interactions Model checking pub-sub system [’03 Garlan, et al.] Invariant-based verification of synchronization
[’02 Deng, et al.] Deadlock detection in distributed object systems
[’01 Kaveh and Emmerich] Modeling, specifying and verifying message passing
systems [’01 Bollig, et al.] Applying Static Analysis to Software Architectures [’97
Naumovich, et al.] etc.
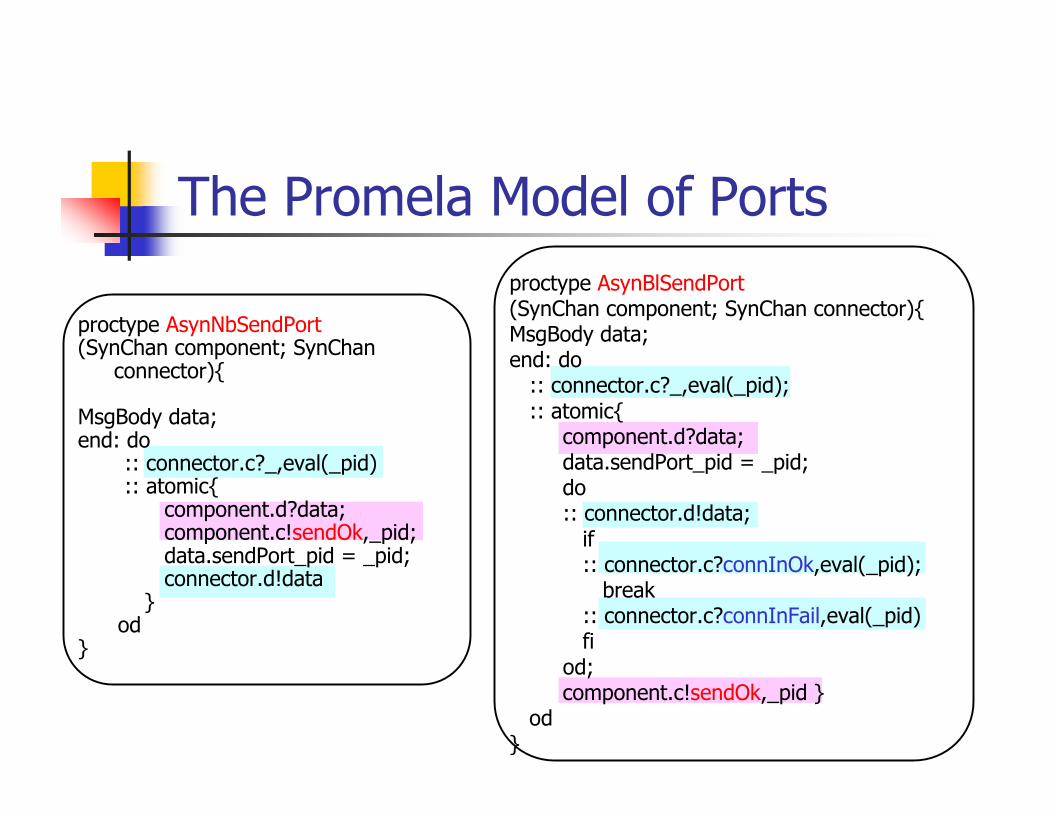
The Promela Model of Ports
proctype AsynNbSendPort(SynChan component; SynChan
connector){
MsgBody data;end: do :: connector.c?_,eval(_pid) :: atomic{ component.d?data; component.c!sendOk,_pid; data.sendPort_pid = _pid; connector.d!data } od}
proctype AsynBlSendPort(SynChan component; SynChan connector){MsgBody data;end: do :: connector.c?_,eval(_pid); :: atomic{ component.d?data; data.sendPort_pid = _pid; do :: connector.d!data; if :: connector.c?connInOk,eval(_pid); break :: connector.c?connInFail,eval(_pid) fi od; component.c!sendOk,_pid } od}
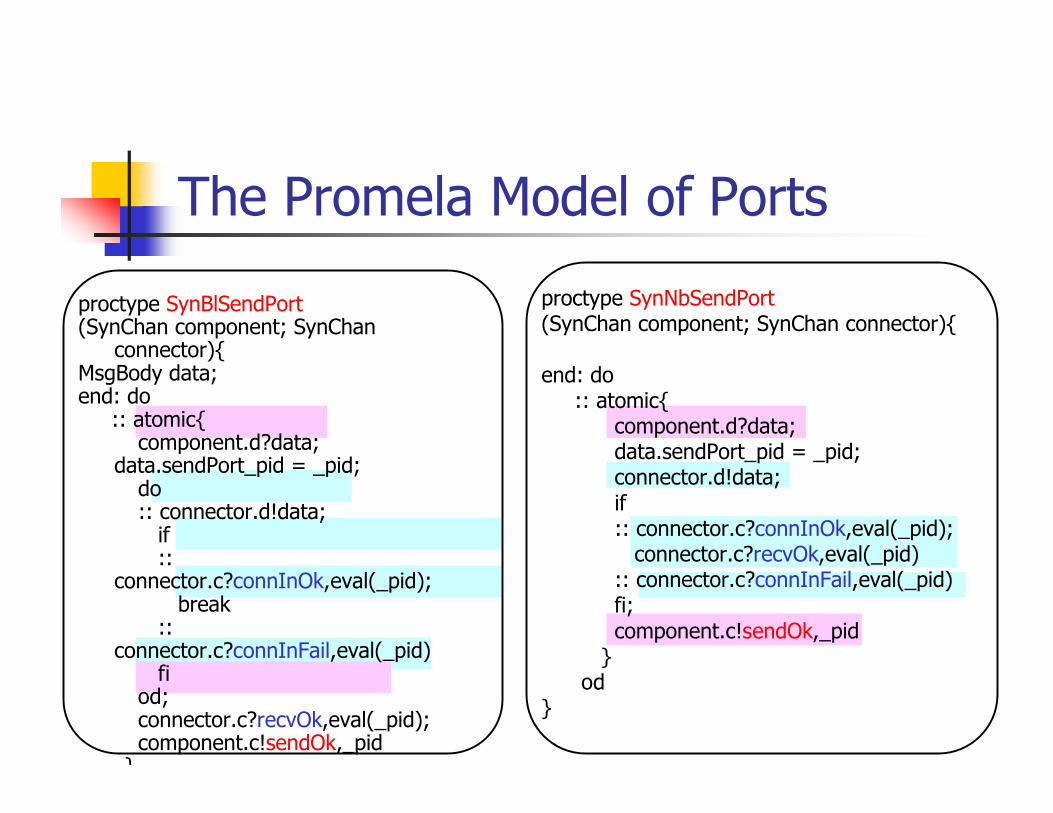
The Promela Model of Ports
proctype SynBlSendPort(SynChan component; SynChan
connector){MsgBody data;end: do :: atomic{ component.d?data;
data.sendPort_pid = _pid; do :: connector.d!data; if ::
connector.c?connInOk,eval(_pid); break ::
connector.c?connInFail,eval(_pid) fi od; connector.c?recvOk,eval(_pid); component.c!sendOk,_pid } od }
proctype SynNbSendPort(SynChan component; SynChan connector){
end: do :: atomic{ component.d?data; data.sendPort_pid = _pid; connector.d!data; if :: connector.c?connInOk,eval(_pid); connector.c?recvOk,eval(_pid) :: connector.c?connInFail,eval(_pid) fi; component.c!sendOk,_pid } od}
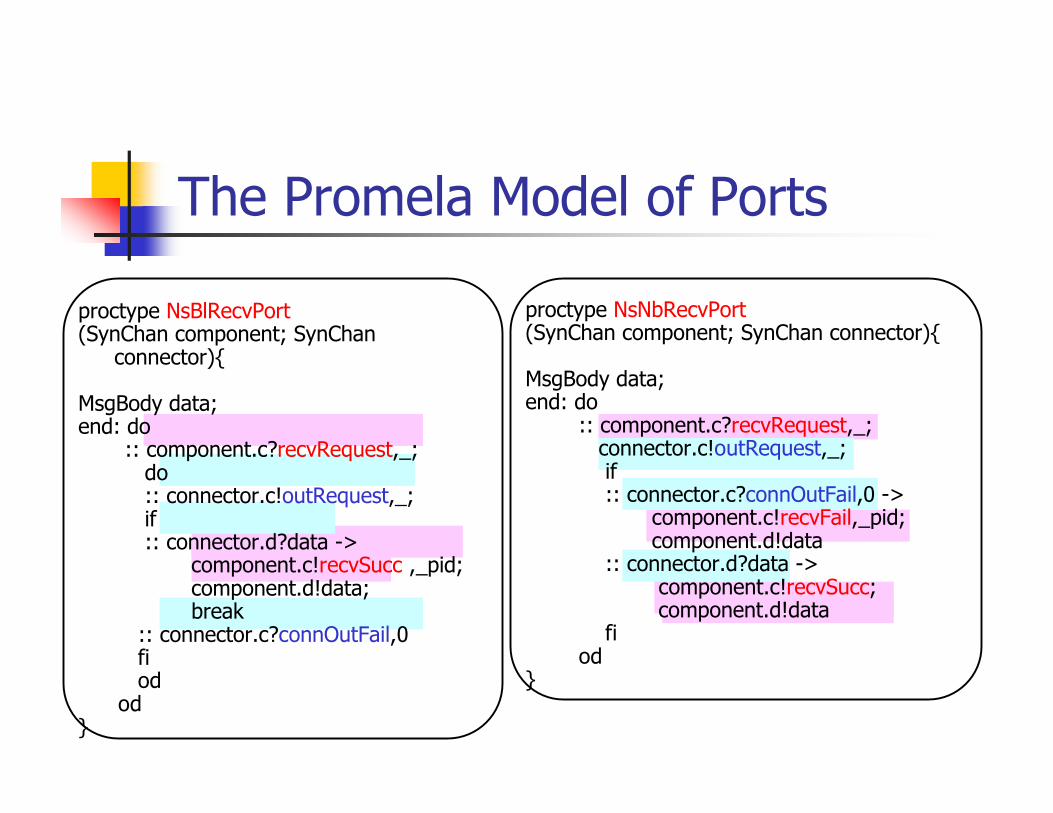
The Promela Model of Ports
proctype NsBlRecvPort(SynChan component; SynChan
connector){
MsgBody data;end: do :: component.c?recvRequest,_; do :: connector.c!outRequest,_; if :: connector.d?data -> component.c!recvSucc ,_pid; component.d!data; break :: connector.c?connOutFail,0 fi od od}
proctype NsNbRecvPort(SynChan component; SynChan connector){
MsgBody data;end: do :: component.c?recvRequest,_; connector.c!outRequest,_; if :: connector.c?connOutFail,0 -> component.c!recvFail,_pid; component.d!data :: connector.d?data -> component.c!recvSucc; component.d!data fi od}
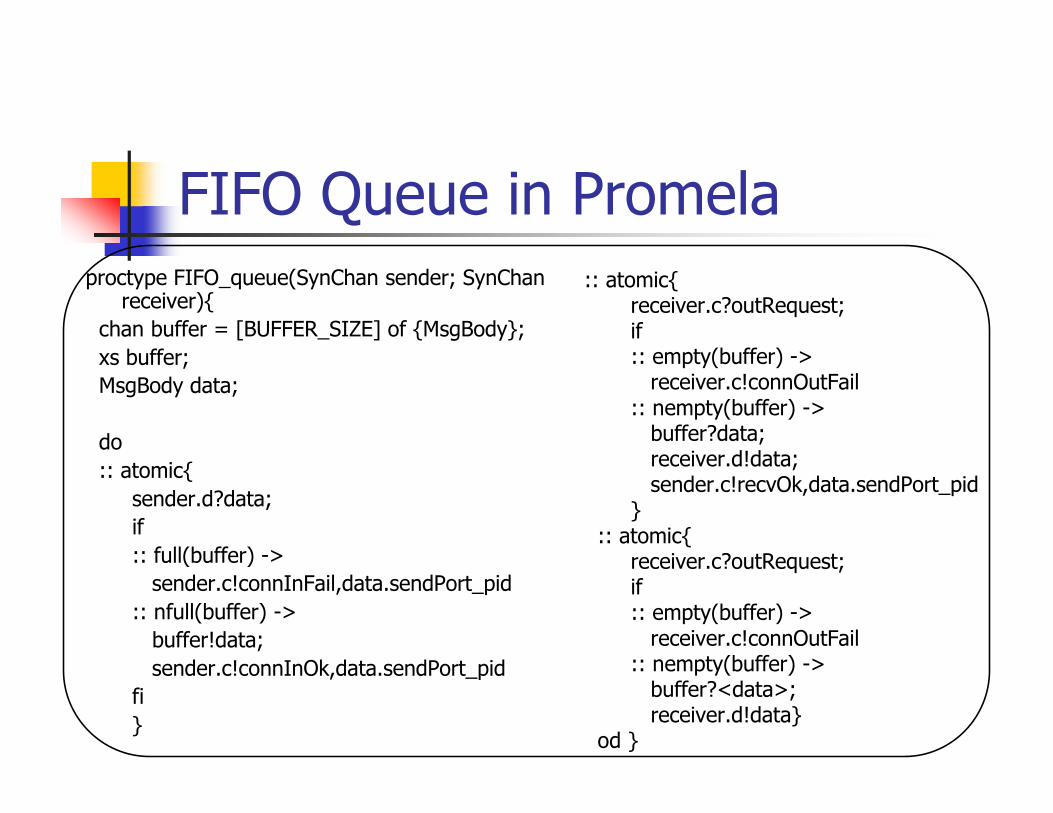
FIFO Queue in Promelaproctype FIFO_queue(SynChan sender; SynChan
receiver){ chan buffer = [BUFFER_SIZE] of {MsgBody}; xs buffer; MsgBody data;
do :: atomic{ sender.d?data; if :: full(buffer) -> sender.c!connInFail,data.sendPort_pid :: nfull(buffer) -> buffer!data; sender.c!connInOk,data.sendPort_pid fi }
:: atomic{ receiver.c?outRequest; if :: empty(buffer) -> receiver.c!connOutFail :: nempty(buffer) -> buffer?data; receiver.d!data; sender.c!recvOk,data.sendPort_pid } :: atomic{ receiver.c?outRequest; if :: empty(buffer) -> receiver.c!connOutFail :: nempty(buffer) -> buffer?<data>; receiver.d!data} od }
Notes
Basic Assumptions for Connectors Sends connInOk when the message is successfully
buffered; sends connInFail when it fails to buffer themessage (e.g. when the buffer is full) leaves to the sendPort to decide what to do with these
feedbacks
Sends connOutFail when the requested message is notavailable; otherwise directly delivers the message to therecvPort
Always sends recvOk to the corresponding sendPort whena message is delivered to a recvPort Although the sendPort may not care
Subtlety of the semantics of connectors(notes)
When my buffer is full,
Do not accept the sending of messages to me
Works with blocking send, but not nonblocking send
Accept the sending of messages, but hold the newly receivedmessage which will be eventually put into the buffer (retry by theconnector)
has a cache that holds up to 1 message, what happens if there aremore waiting
The blocking semantics could also be implemented using “retry by thesend port”
Accept the sending but just drops the message (lossy), in this case,do I send connInfail?
Does not work with blocking send
Example Variations ofMessage Passing Semantics
Synchronous ~ Asynchronous A synchronous sender sends a message and waits until it is
told that the message has been received An asynchronous sender sends a message and returns right
away regardless whether the message has been received
Blocking ~ Nonblocking ~ Checking Selective ~ Nonselective Copy ~ Remove Buffer type
Example Variations ofMessage Passing Semantics
Synchronous ~ Asynchronous Blocking ~ Nonblocking ~ Checking
Blocking receive / nonblocking receive Blocking send / nonblocking send / checking send
Selective ~ Nonselective Copy ~ Remove Buffer type
Example Variations ofMessage Passing Semantics
Synchronous ~ Asynchronous Blocking ~ Nonblocking Selective ~ Nonselective
A selective receiver could specify certain matching criteriafor retrieving messages
A nonselective receiver accepts any message it gets
Copy ~ Remove Buffer type
Example Variations ofMessage Passing Semantics
Synchronous ~ Asynchronous Blocking ~ Nonblocking Selective ~ Nonselective Copy ~ Remove
A receiver may choose to copy a message or remove amessage from a buffer when it does a receive
Buffer type
Example Variations ofMessage Passing Semantics
Synchronous ~ Asynchronous Blocking ~ Nonblocking ~ Checking Selective ~ Nonselective Copy ~ Remove Buffer type
Size, ordering (e.g. FIFO queue, priority queue) Reliable or lossy
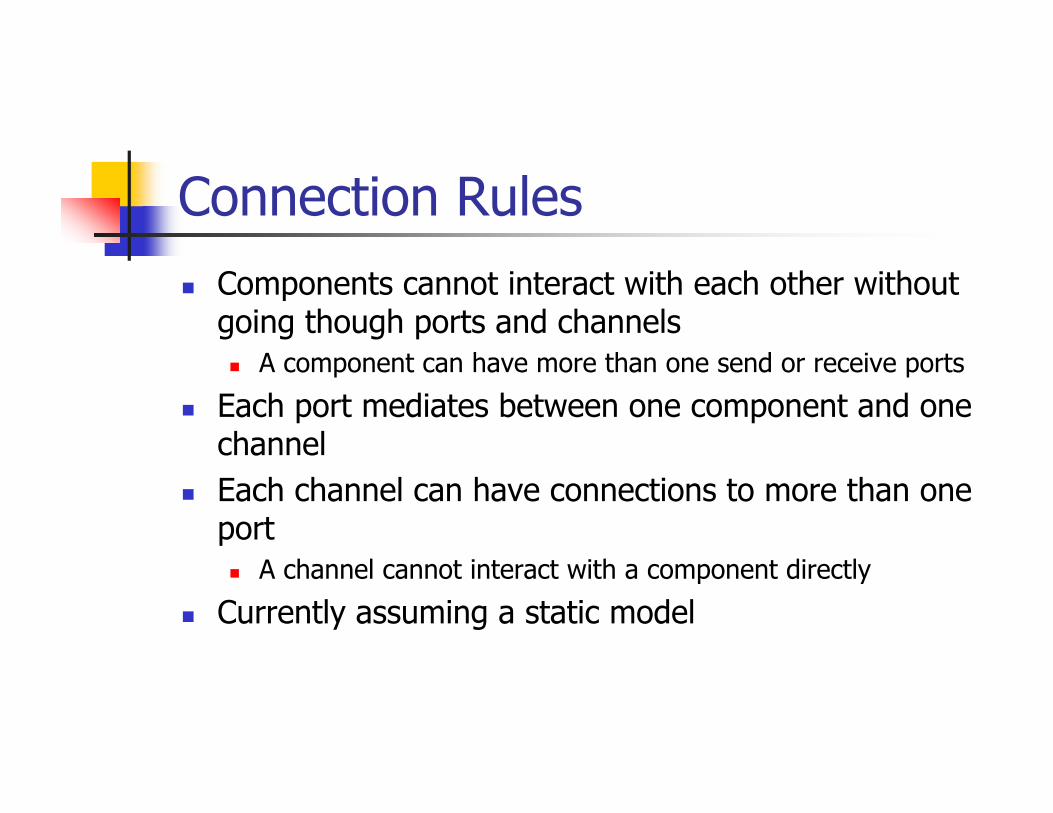
Connection Rules Components cannot interact with each other without
going though ports and channels A component can have more than one send or receive ports
Each port mediates between one component and onechannel
Each channel can have connections to more than oneport A channel cannot interact with a component directly
Currently assuming a static model
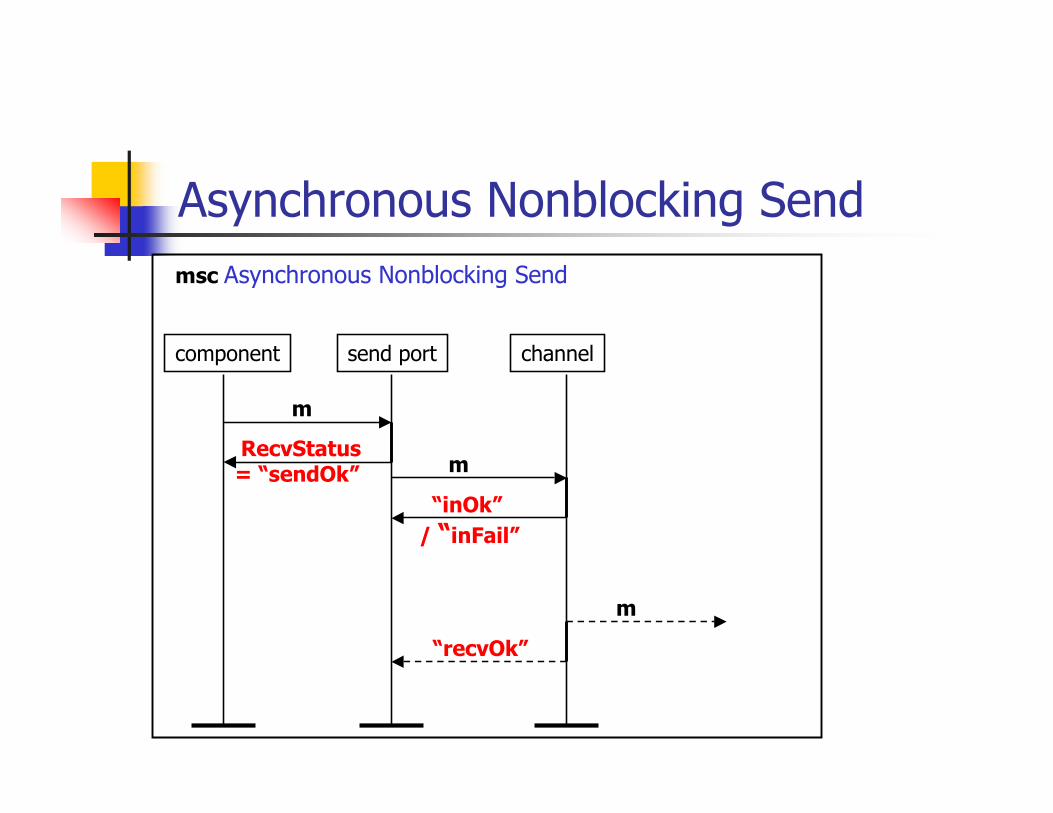
Asynchronous Nonblocking Send msc Asynchronous Nonblocking Send
component channelsend port
m
m
“inOk” / “inFail”
RecvStatus= “sendOk”
m
“recvOk”
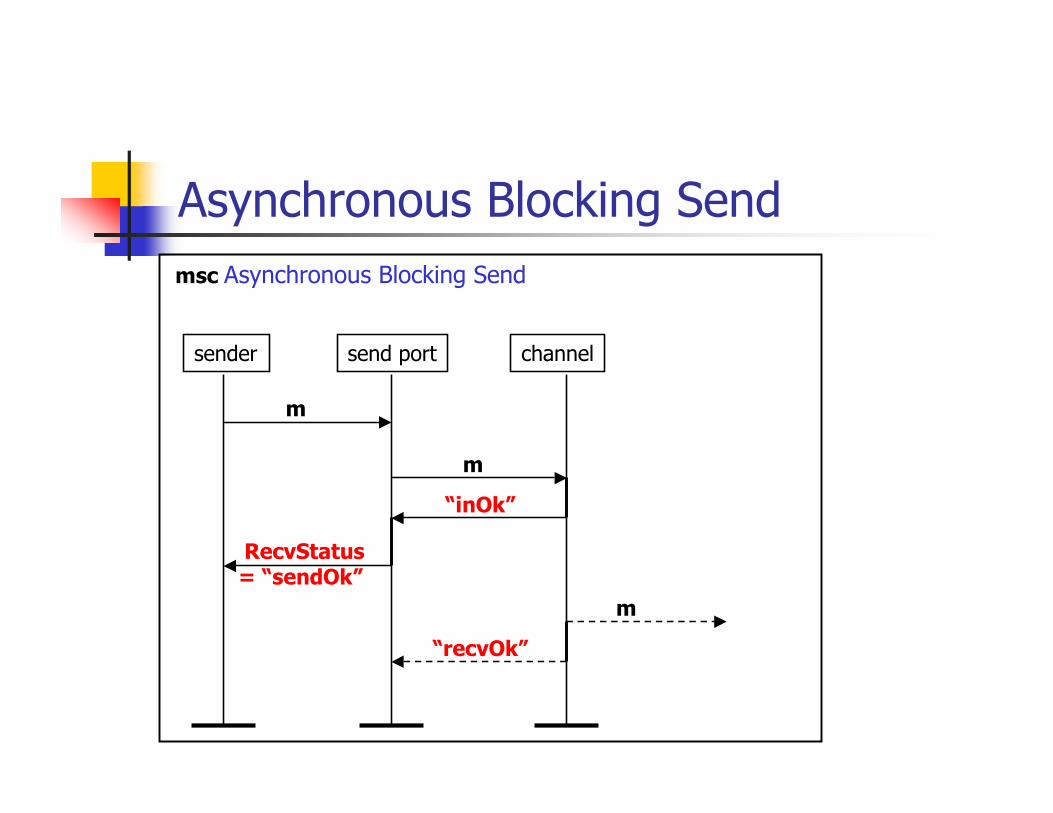
Asynchronous Blocking Send msc Asynchronous Blocking Send
sender channelsend port
m
m
“inOk”
m
“recvOk”
RecvStatus= “sendOk”
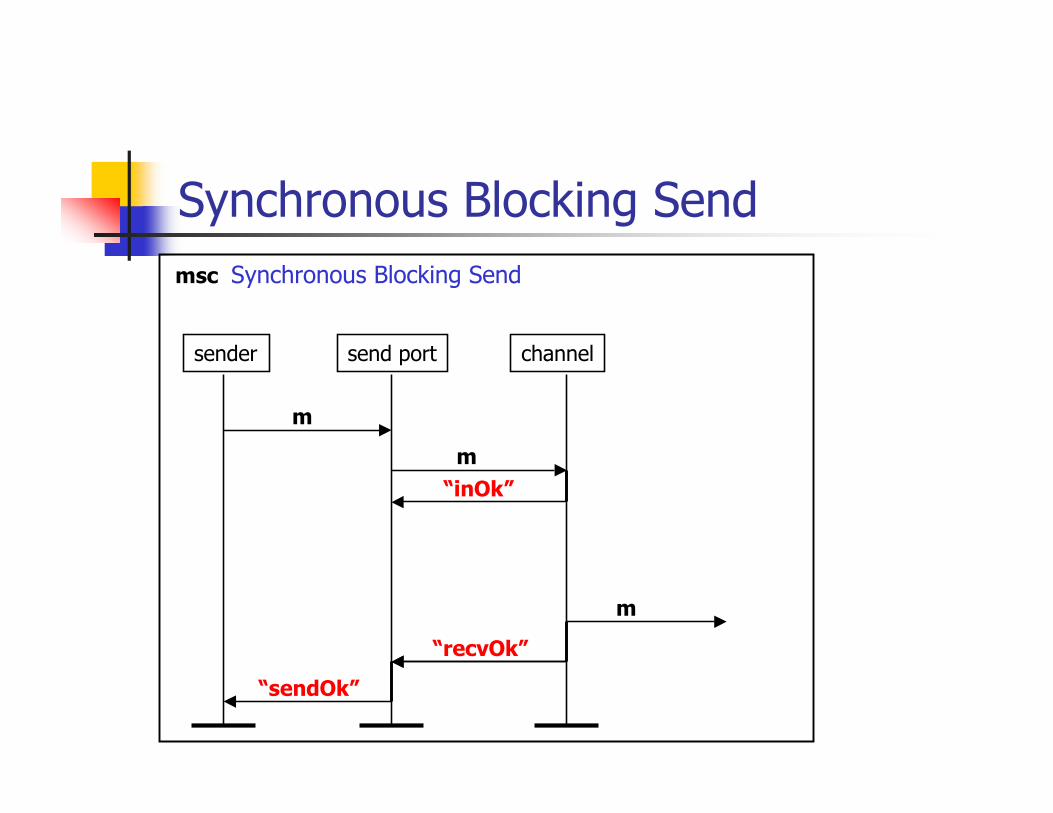
Synchronous Blocking Send msc Synchronous Blocking Send
sender channelsend port
m
m “inOk”
“sendOk”
“recvOk”
m
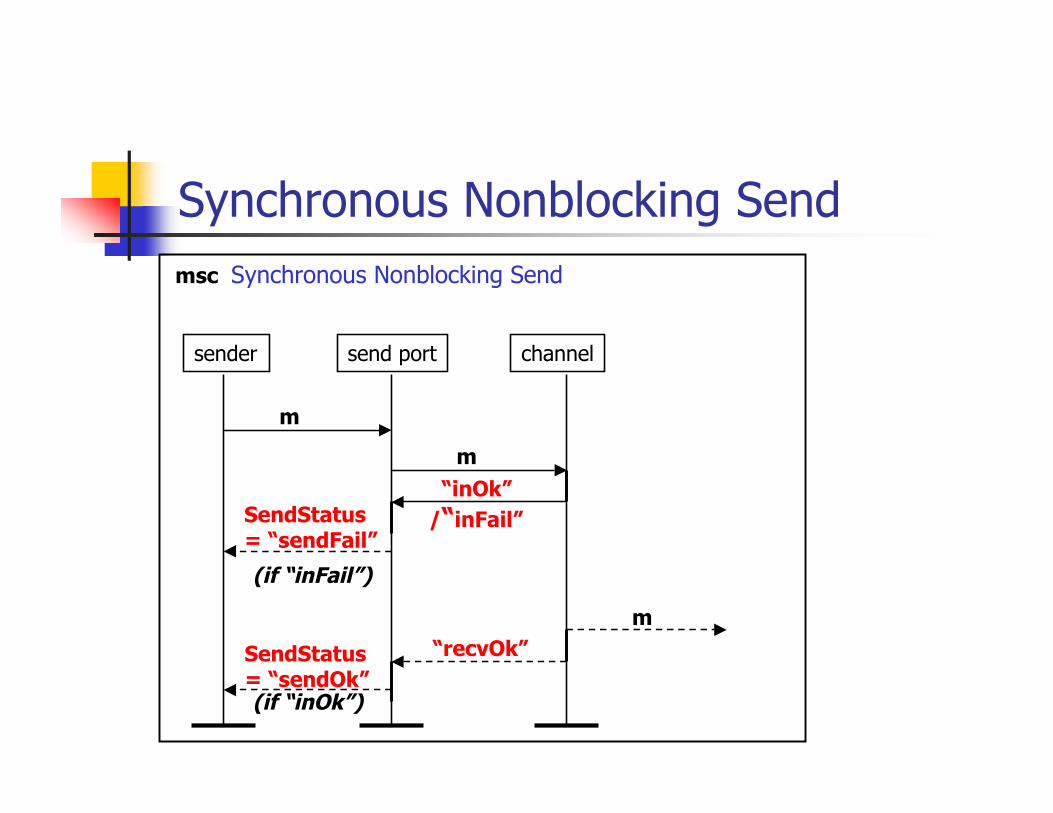
Synchronous Nonblocking Send msc Synchronous Nonblocking Send
sender channelsend port
m
m “inOk” /“inFail”
m“recvOk”
SendStatus = “sendFail”
(if “inFail”)
(if “inOk”)
SendStatus = “sendOk”
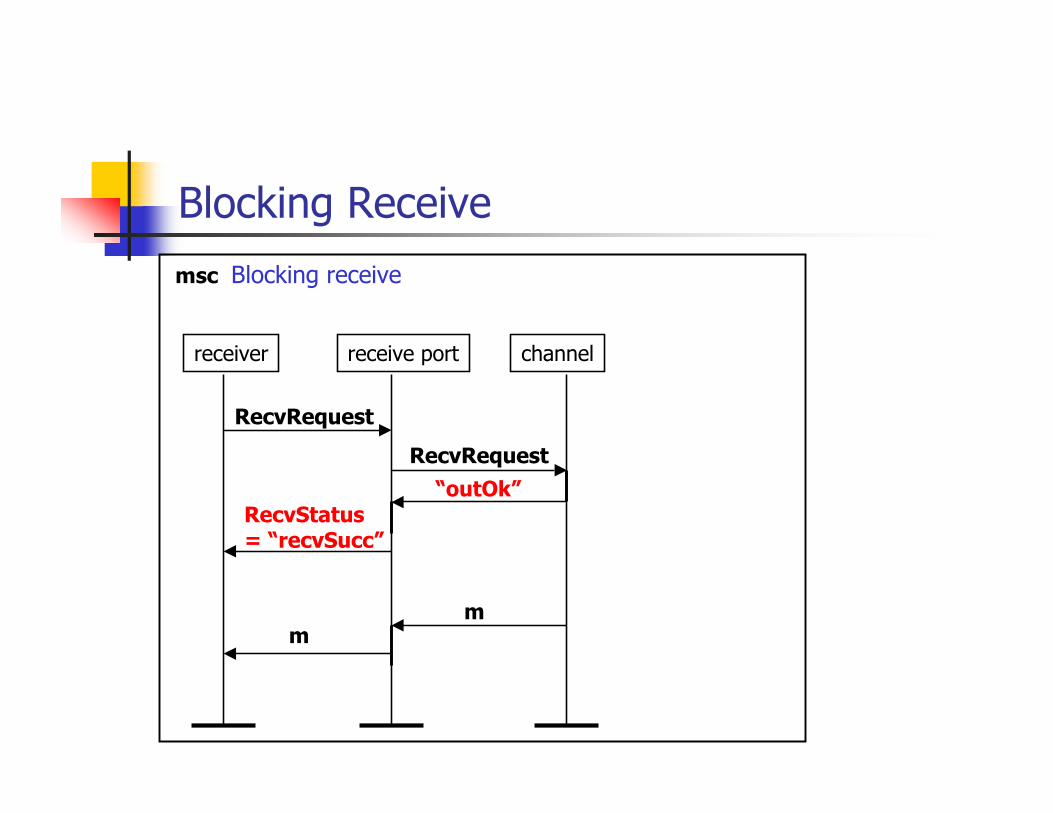
Blocking Receive
msc Blocking receive
receiver channelreceive port
RecvRequest
“outOk”
m
RecvStatus = “recvSucc”
RecvRequest
m
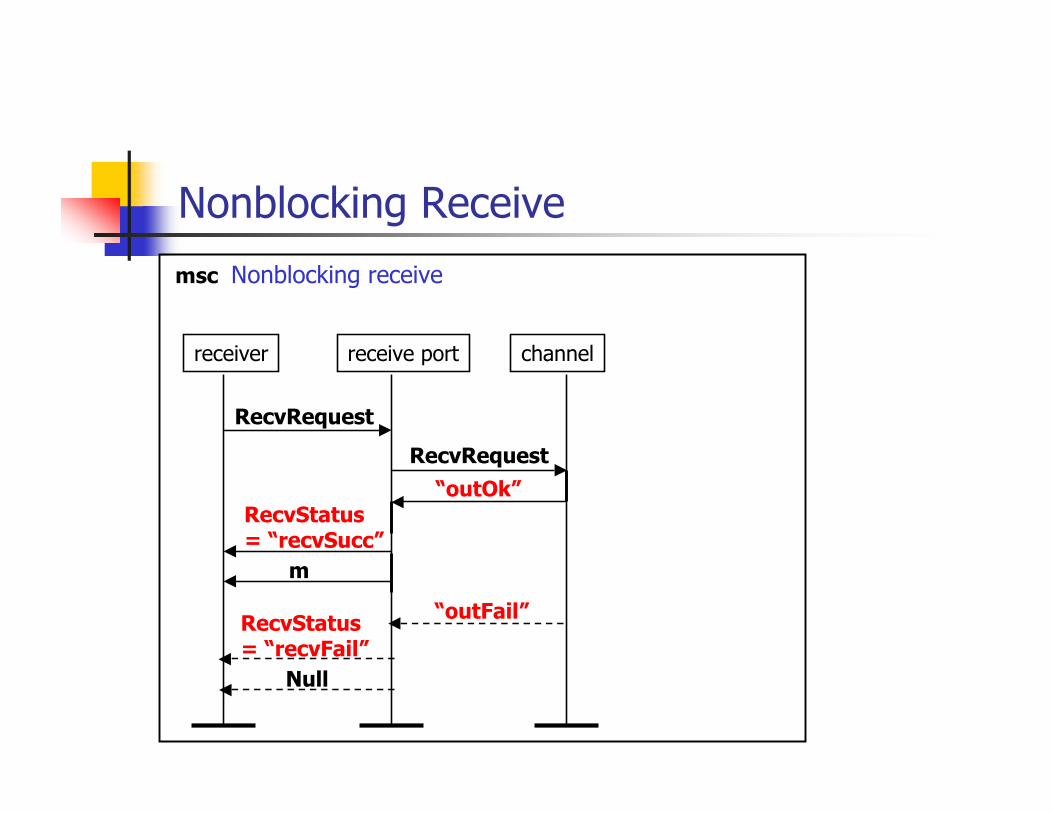
Nonblocking Receive
msc Nonblocking receive
receiver channelreceive port
RecvRequest
“outOk”RecvStatus = “recvSucc”
RecvRequest
m
“outFail”RecvStatus = “recvFail”
Null

The Single-lane Bridge Example Version 3: Emergency vehicles may enter the bridge
from either side Emergency vehicles have higher priorities to enter the bridge
Change Blue_Enter and Red_Enter to priority queues
When there is an emergency vehicle waiting , anEmergency_Stop message is sent so that the controller atthe other side can stop accepting cars onto the bridge andyields turns sooner
Introducing new connectors between two controllers fromemergency_stop signal
Using copy receive ports (instead of remove receive ports) tocheck if there is an emergency vehicle waiting
The Single-lane Bridge Example Version 1: At each turn, exactly N cars from the
current direction can enter the bridge No communication is needed between two controllers
Version 2: At each turn, up to N cars from thecurrent direction can enter the bridge Turns can be yielded immediately if no more cars are
waiting before the total number reaches N Controllers need to use nonblocking receive instead of blocking
receive A controller has to notify the other controller of the actual
number of cars that have entered the bridge Introducing new connectors between two controllers Introducing new ports for controllers
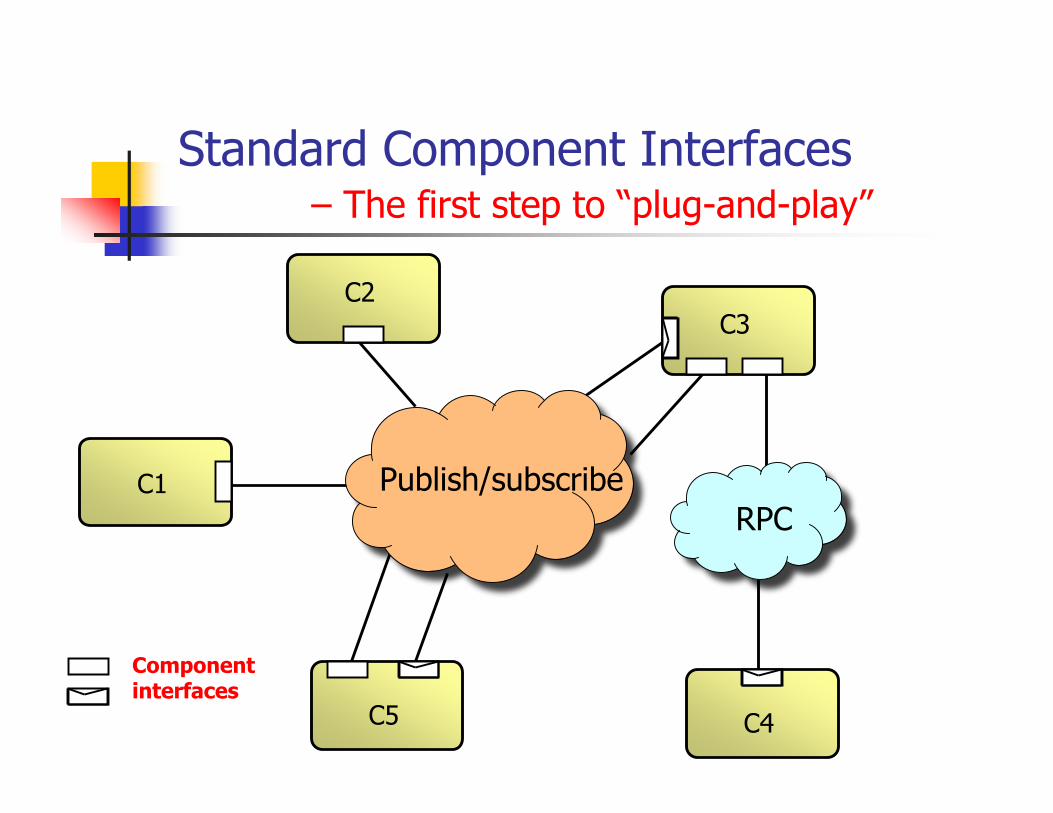
C1
C2
C5 C4
C3
Standard Component Interfaces – The first step to “plug-and-play”
Publish/subscribeRPC
Componentinterfaces
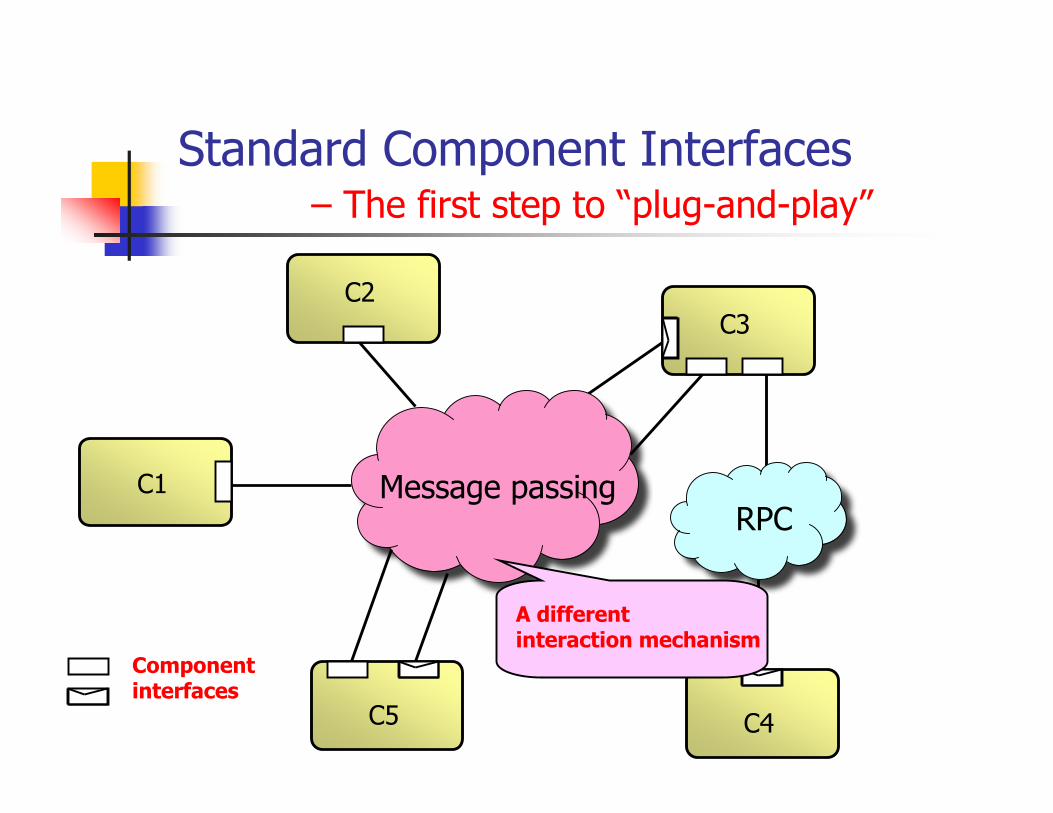
C1
C2
C5 C4
C3
Standard Component Interfaces – The first step to “plug-and-play”
Message passingRPC
A different interaction mechanism
Componentinterfaces
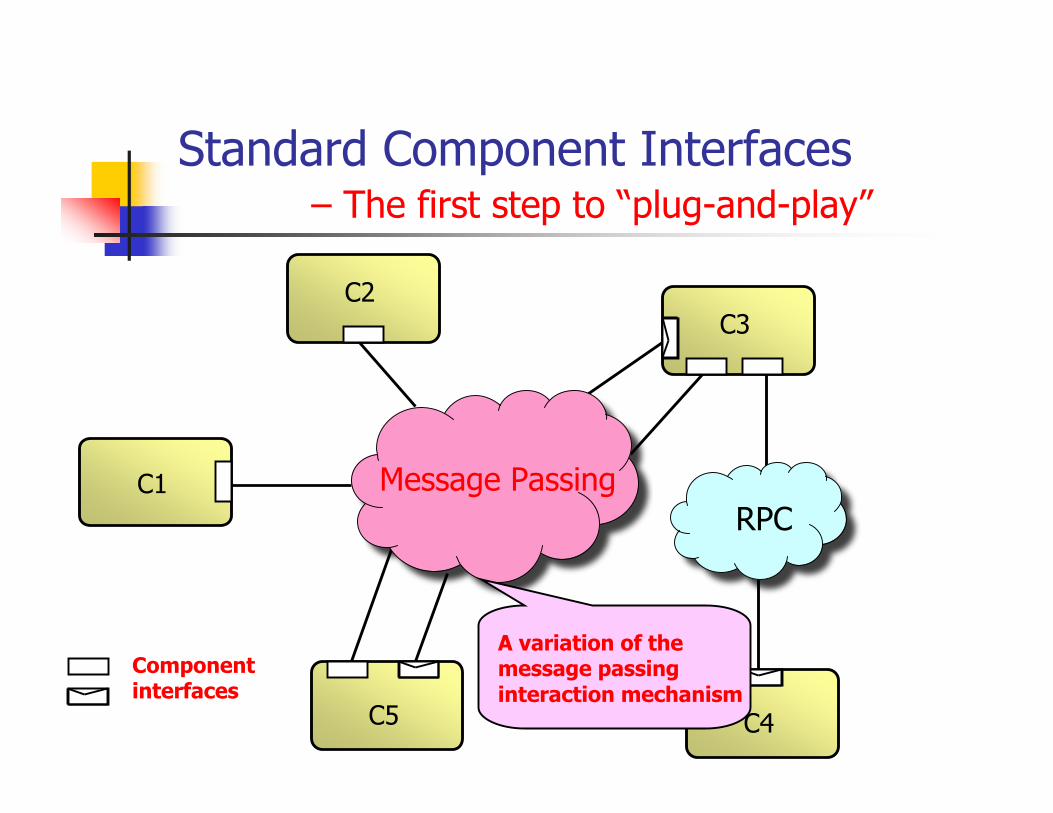
C1
C2
C5 C4
C3
Standard Component Interfaces – The first step to “plug-and-play”
RPC
A variation of themessage passinginteraction mechanism
Message Passing
Componentinterfaces
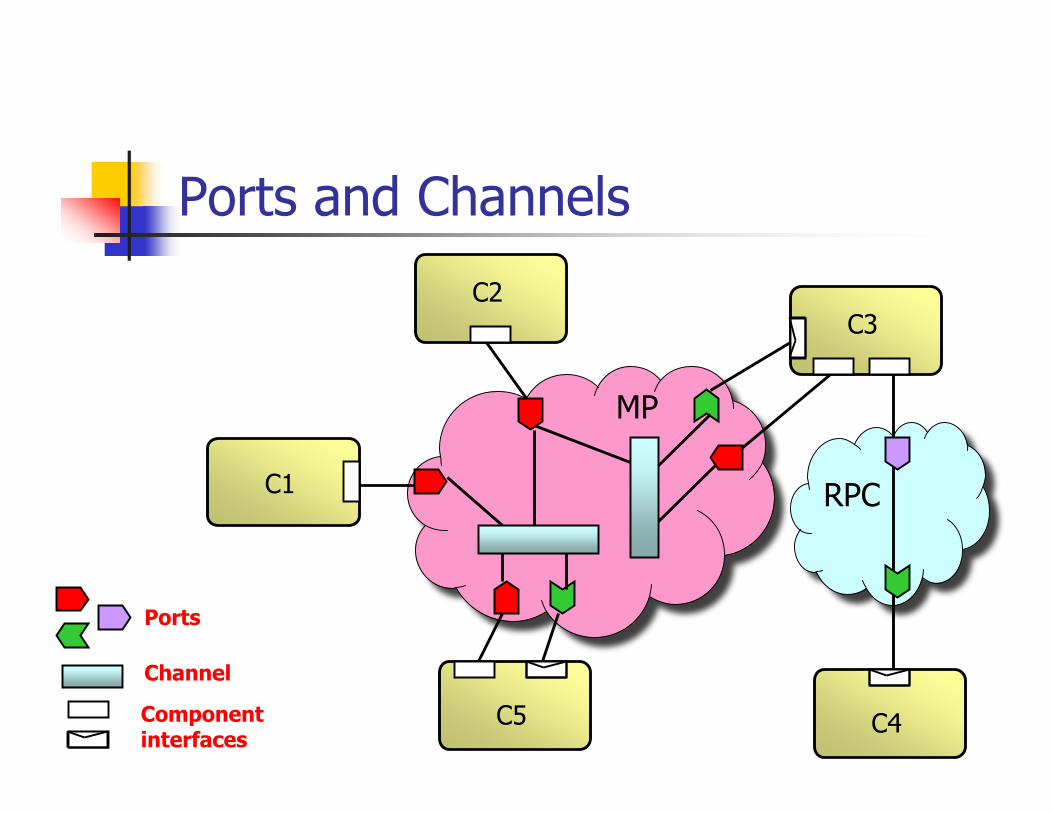
Ports and Channels
C1
C2
C5 C4
C3
RPC
MP
Componentinterfaces
Ports
Channel