appunti di teoria dei segnali aleatori corso di tecniche ... · appunti di teoria dei segnali...
TRANSCRIPT
Appunti di Teoria dei Segnali AleatoriCorso di Tecniche di Trasmissione
A.A. 2003-2004
Francesco Vatalaro, Franco Mazzenga
5 dicembre 2003
Indice
1 Richiami di teoria della probabilita 31.1 Brevi richiami sulla teoria assiomatica della Probabilita . . . . . . . . . . . . . . 3
1.1.1 Assiomi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.1.2 Probabilita condizionata . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.1.3 Eventi indipendenti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.1.4 Teorema della probabilita totale e Teorema di Bayes . . . . . . . . . . . 5
1.2 Variabili aleatorie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.2.1 Funzioni di distribuzione e di densita di probabilita . . . . . . . . . . . . 61.2.2 Funzione di densita di probabilita . . . . . . . . . . . . . . . . . . . . . . 7
1.3 Distribuzioni condizionate di probabilita . . . . . . . . . . . . . . . . . . . . . . 71.4 Momenti di una variabile aleatoria . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.4.1 Funzione caratteristica e funzione generatrice di una v.a. . . . . . . . . . 91.4.2 Cumulanti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.4.3 Esempi di funzioni di distribuzione e densita di probabilita . . . . . . . . 11
1.5 Funzioni di variabile aleatoria . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151.5.1 Calcolo della funzione di distribuzione . . . . . . . . . . . . . . . . . . . 151.5.2 Calcolo della funzione di densita di probabilita . . . . . . . . . . . . . . . 15
1.6 Sequenze di variabili aleatorie . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161.6.1 Trasformazioni di variabili aleatorie . . . . . . . . . . . . . . . . . . . . . 161.6.2 Derivazione alternativa . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171.6.3 Indipendenza di variabili aleatorie . . . . . . . . . . . . . . . . . . . . . . 191.6.4 Medie, varianze e covarianze . . . . . . . . . . . . . . . . . . . . . . . . . 191.6.5 Funzioni di densita condizionali . . . . . . . . . . . . . . . . . . . . . . . 191.6.6 Funzione caratteristica . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
1.7 Variabili aleatorie complesse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2 Processi stocastici - concetti generali 212.1 Definizione di processo stocastico . . . . . . . . . . . . . . . . . . . . . . . . . . 212.2 Grandezze statistiche che caratterizzano un processo stocastico . . . . . . . . . . 222.3 Proprieta statistiche di un processo stocastico . . . . . . . . . . . . . . . . . . . 232.4 Momenti di un processo stocastico . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.4.1 Medie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 232.4.2 Autocorrelazione e autocovarianza di processi stocastici . . . . . . . . . . 232.4.3 Proprieta delle funzioni di autocorrelazione e di autocovarianza . . . . . 25
2.5 Processi tempo discreti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 262.6 Classificazione dei processi stocastici . . . . . . . . . . . . . . . . . . . . . . . . 27
2.6.1 Processi stazionari . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
1
2.6.2 Processi stazionari in senso lato . . . . . . . . . . . . . . . . . . . . . . . 272.7 Proprieta delle funzione di autocorrelazione e di cross-correlazione per processi
stazionari . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 282.7.1 Processi ciclostazionari . . . . . . . . . . . . . . . . . . . . . . . . . . . . 302.7.2 Significato fisico della proprieta di ciclostazionarieta . . . . . . . . . . . . 31
2.8 Processi ergodici . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 332.8.1 Concetti generali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 332.8.2 Processo ergodico in media . . . . . . . . . . . . . . . . . . . . . . . . . . 342.8.3 Processo ergodico in correlazione . . . . . . . . . . . . . . . . . . . . . . 34
3 Teoria spettrale dei processi stocastici 363.1 Processi stazionari almeno in senso lato . . . . . . . . . . . . . . . . . . . . . . . 36
3.1.1 Teorema di Wiener-Khinchine . . . . . . . . . . . . . . . . . . . . . . . . 373.1.2 Annotazione sui processi ciclostazionari . . . . . . . . . . . . . . . . . . . 37
3.2 Analisi spettrale per processi tempo discreti . . . . . . . . . . . . . . . . . . . . 37
4 Trasformazioni di processi stocastici 394.1 Generalita sulle trasformazioni di processi stocastici . . . . . . . . . . . . . . . . 394.2 Sistemi senza memoria tempo invarianti . . . . . . . . . . . . . . . . . . . . . . 404.3 Sistemi lineari - tempo varianti e tempo invarianti . . . . . . . . . . . . . . . . . 414.4 Trasformazione di un processo in un sistema lineare . . . . . . . . . . . . . . . . 41
4.4.1 Trasformazione processo stazionario in un sistema lineare tempo invariante 41
5 Esempi di processi stocastici:Il processo Gaussiano 425.1 Proprieta generali dei vettori di variabili aleatorie Gaussiane . . . . . . . . . . . 425.2 Caratteristiche dei processi aleatori Gaussiani . . . . . . . . . . . . . . . . . . . 43
5.2.1 Trasformazione lineare di processi Gaussiani . . . . . . . . . . . . . . . . 445.2.2 NOTA: generalita sul processo bianco stazionario . . . . . . . . . . . . . 44
6 Esempi di processi stocastici: Segnali Modulati 456.1 Modello di segnale armonico modulato . . . . . . . . . . . . . . . . . . . . . . . 45
6.1.1 Calcolo dello spettro di potenza del processo . . . . . . . . . . . . . . . . 466.2 Modello di segnale numerico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
6.2.1 Calcolo dello spettro di potenza del processo . . . . . . . . . . . . . . . . 47
2
Capitolo 1
Richiami di teoria della probabilita
Notazione: la probabilita di un evento A e un numero P (A) assegnato all’evento stesso. Ilnumero P (A) puo essere interpretato come segue. Si supponga di effettuare un esperimenton volte. Se con nA si indica il numero di volte che si e verificato l’evento A allora, se ne sufficientemente elevato, la frequenza nA/n relativa alle occorrenze dell’evento A e moltoprossima a P (A) ossia:
P (A) ∼=nAn
. (1.1)
1.1 Brevi richiami sulla teoria assiomatica della Proba-
bilita
La teoria assiomatica della probabilita sfrutta la teoria degli insiemi. Viene introdotta la se-guente terminologia. Lo spazio S e chiamato evento certo. Esso si verifica in ogni ripetizionedell’esperimento. Gli elementi di S sono indicati come i risultati possibili dell’esperimento.I sottoinsiemi di S sono detti eventi. L’insieme vuoto ∅ e detto evento impossibile e l’eventoζi che consiste in un solo elemento di S e detto evento elementare.
Esempio:si consideri l’esperimento del lancio di un dado con sei facce (fi). Lo spazio S ecomposto dagli elementi S = f1, f2, f3, f4, f5, f6 in cui fi sono gli eventi elementari (fi =faccia i-esima) . Questo spazio S ha 24 = 64 sottoinsiemi e l’evento “si e verificata l’uscita diuna faccia del dado con numero pari” e il sottoinsieme composto dagli elementi f2, f4, f6.
1.1.1 Assiomi
Ad ogni evento A si puo assegnare un numero P (A) indicato come probabilita di A. Questonumero viene scelto in modo che siano soddisfatti i seguenti assiomi:
• P (A) ≥ 0
• P (S) = 1
3

• Se con A e B si indicano due eventi tali che AB = ∅allora si deve avere: P (A + B) =P (A) + P (B). 1
Dalle proprieta di cui ai punti precedenti discendono le seguenti formule:
• P (∅) = 0
• P (A) = 1− P (A) in cui A e l’insieme complementare di A.
• P (A+ B) = P (A) + P (B)− P (AB)
Come gia accennato gli eventi sono sottoinsiemi di S. Per dare una struttura allo spazio SNON si considerano come eventi tutti i sottoinsiemi di S ma soltanto una sottoclasse di eventiche formano un campo (piu esattamente un campo di Borel). Non ci si dilunghera su questoargomento rimandando il lettore interessato a testi specializzati.
1.1.2 Probabilita condizionata
La probabilita condizionata di un evento A dato l’evento M e indicata con P (A|M) e perdefinizione e data dal rapporto:
P (A|M) =P (AM)
P (M), (1.2)
nella ipotesi in cui P (M) 6= 0. Dalla (1.2) si ricavano le seguenti proprieta:
• seM⊂ A allora P (A|M) = 1.
• se A ⊂M allora P (A|M) = P (A)P (M)
≥ P (A).
Per comprendere meglio il significato della probabilita condizionata si puo ricorrere alla inter-pretazione frequenziale in (1.1) della probabilita di un evento. Si supponga di effettuare unesperimento n volte e si indichino con nA, nM e nA,M il numero di volte in cui si sono verificatigli eventi A, M e AM, rispettivamente. Specializzando la (1.1) al caso dei tre eventi di cuiprima, si dimostra facilmente che:
P (A|M) ∼=nA,M
nM. (1.3)
Il risultato espresso dalla (1.3) si puo leggere in questo modo: considerando tra gli n soltantoquelli in cui si e verificato l’evento M allora la P (A|M) e pari alla frequenza relativa delleoccorrenze nA,M dell’evento A nella sequenza di esperimenti in cui si e verificatoM.
1.1.3 Eventi indipendenti
Due eventi A e B sono indipendenti se:
P (AB) = P (A)P (B). (1.4)
Se due eventi A e B sono indipendenti allora P (A|B) = P (A).Affinche tre eventi Ai e i = 1, 2, 3 siano indipendenti devono valere le seguenti proprieta:
• P (AiAj) = P (Ai)P (Aj) i 6= j
• P (A1A2A3) = P (A1)P (A2)P (A3)
1+: indica unione degli insiemi che descrivono gli eventi; il prodotto degli eventi indica l’intersezione degliinsiemi che descrivono gli eventi.
4
1.1.4 Teorema della probabilita totale e Teorema di Bayes
Se con Ω = [A1, ...,AN ] si indica una partizione di S e con B si indica un evento allora vale laseguente formula di ricostruzione per P (B) a partire dalle probabilita condizionate P (B|Ai):
P (B) =N∑
n=1
P (B|An)P (An). (1.5)
Siccome valgono le relazioni PBAi = P (B|Ai)P (Ai) e PBAi = P (Ai|B)P (B) uguagliandoi primi due mebri si ricava la seguente relazione tra le probabilita condizionate e le probabilitadegli eventi:
P (Ai|B) =P (B|Ai)P (Ai)
P (B). (1.6)
Partendo dalla (1.6) e utilizzando la formula della probabilita totale in (1.5) si ottiene la formuladi Bayes:
P (Ai|B) =P (B|Ai)P (Ai)∑N
n=1 P (B|An)P (An)(1.7)
5

1.2 Variabili aleatorie
Si consideri lo spazio degli eventi S associato ad un esperimento. Come gia accennato, isottoinsiemi di S sono detti eventi. Una variabile aleatoria (v.a.) e un numero x(ζ) assegnatoad ogni possibile risultato ζ dell’esperimento.Esempio:nel caso del lancio di un dado si hanno sei possibili risultati fi. Si puo ad es. considerarela v.a. x(fi) = i · 10. L’espressione x(f2) e uguale a 20.Una v.a. e quindi una funzione con dominio lo spazio degli eventi e codominio un insiemedi numeri (reali, complessi, interi etc.. ). Nel seguito una variabile aleatoria viene indicatain grassetto. Nello studio di problemi che coinvolgono v.a. ci si chiede spesso quale sia laprobabilita dell’evento che la v.a. x sia minore di un dato numero x oppure quale sia laprobabilita dell’evento che una variabile aleatoria assuma valori tra x1 e x2. Quindi nel caso div.a. siamo interessati a studiare le probabilita di eventi del tipo:
x ≤ x x1 ≤ x ≤ x2.
Questa notazione rappresenta un sottoinsieme (un evento) all’interno dello spazio degli eventiS e piu esattamente questo sottoinsieme contiene tutti i possibili risultati dell’esperimento ζtali che x(ζ) ≤ x. Il significato dell’evento x1 ≤ x ≤ x2 e del tutto analogo. Esso rappresentaun sottoinsieme di S tale che x1 ≤ x(ζ) ≤ x2. La notazione x = x indica un sottoinsiemedi elementi di S per i quali x(ζ) = x. Infine se con Ξ si indica un insieme di numeri alloral’evento x ∈ Ξ rappresenta un sottoinsieme di S che contiene tutti i possibili risultati per cuix(ζ) ∈ Ξ. La definizione formale di una v.a. e riassunta di seguito:Una v.a. e un processo di assegnazione di un numero x(ζ) ad ogni risultato ζ di un esperimento.La funzione risultante deve soddisfare queste due proprieta:
• L’insieme x ≤ x e un evento per ogni valore di x.
• Le probabilite degli eventi x =∞ e x = −∞ sono nulle.
1.2.1 Funzioni di distribuzione e di densita di probabilita
Gli elementi dell’insieme S contenuti nell’evento x ≤ x cambiano con x. La probabilitadell’evento x ≤ x indicata con Px ≤ x e un numero che dipende da x. Questo numero eindicato con Fx(x) e viene chamato Funzione di distribuzione cumulativa della v.a. x.
Proprieta della funzione cumulativa
La funzione di distribuzione cumulativa Fx(x) = F (x) ha le seguenti proprieta:
1. F (+∞) = 1, F (−∞) = 0;
2. Se x1 < x2 allora F (x1) ≤ F (x2) (funzione non decrescente);
3. Se F (x0) = 0 allora F (x) = 0 per ogni x ≤ x0;
4. Px > x = 1− F (x);
5. F (x+) = F (x) (continuita dalla destra);
6. Px1 ≤ x ≤ x2 = F (x2)− F (x1);
6

7. Px = x = F (x)− F (x−)
8. Px1 ≤ x ≤ x2 = F (x2)− F (x−1 );
Una v.a. x e di tipo continuo se la sua funzione di distribuzione F (x) e continua. In questocaso F (x−) = F (x) e di conseguenza Px = x = 0. Una v.a. x e di tipo discreto se la suafunzione di distribuzione F (x) e del tipo a gradini. Se con xi si indicano i punti di discontinuitadella F (x) si ha F (xi)− F (x−i ) = Px = xi = pi. La v.a. x e di tipo misto se la sua F (x) ediscontinua ma non del tipo a gradini.Si osservi che se lo spazio S ha un numero finito di elementi allora ogni v.a. definita su S e ditipo discreto. In generale non e vero il viceversa.
1.2.2 Funzione di densita di probabilita
La derivata della funzione di distribuzione cumulativa F (x) viene indicata con funzione didensita f(x);
f(x) =dF (x)
dx. (1.8)
Se la v.a. x e di tipo discreto si ha:
f(x) =∑
i
piδ(x− xi) pi = Px = xi (1.9)
in cui δ(x) e l’impulso di Dirac.
Proprieta della funzione di densita di probabilita
Alcune proprieta della funzione di densita di probabilita sono illustrate di seguito.
• f(x) ≥ 0;
•∫∞−∞ f(x)dx = 1;
• F (x2)− F (x1) =∫ x2x1
f(x)dx;
• Px ≤ x ≤ x + ∆x ∼= ∆xf(x).
1.3 Distribuzioni condizionate di probabilita
Analogamente alla (1.2) la funzione di distribuzione condizionale F (x|M) di una v.a. xassumendo l’eventoM e definita come:
F (x|M) = Px ≤ x|M =Px ≤ x,M
PM(1.10)
in cui x ≤ x,M e l’evento interesezione degli eventi x ≤ x e M ossia l’insieme di tuttigli elementi ζ ∈ S tali che x(ζ) ≤ x e ζ ∈ M. Ovviamente si deve avere: F (∞|M) = 1 eF (−∞|M) = 0. In aggiunta si ha:
Px1 ≤ x ≤ x2|M =Px1 ≤ x ≤ x2,M
PM. (1.11)
7
La funzione di densita condizionata f(x|M) e per definizione la derivata di F (x|M) ossia:
f(x|M) =dF (x|M)
dx. (1.12)
Un caso di notevole interesse consiste nell’assumereM = x ≤ a. In questo caso si ha:
F (x|x ≤ a) = Px ≤ x|x ≤ a =Px ≤ x,x ≤ a
PM ≤ a. (1.13)
Si possono considerare i seguenti casi notevoli.
• x ≥ a: F (x|x ≤ a) = 1;
• x < a: F (x|x ≤ a) = F (x)/F (a).
Anche il caso in cuiM = b < x ≤ a e di interesse. Si lascia al lettore il calcolo della F (x|M)in questo caso al variare di a e b relativamente a x.Un’altro risultato molto importante e la versione continua del teorema della probabilita totale.Si dimostra che:
P (A) =∫ +∞
−∞P (A|x = x)f(x)dx. (1.14)
1.4 Momenti di una variabile aleatoria
I momenti di una v.a. sono delle quantita di notevole interesse. Queste grandezze sono definitecome indicato di seguito.Si definisce valore atteso di una v.a. la quantita:
Ex =∫ ∞
−∞xf(x)dx = η = ηx (1.15)
Per v.a. di tipo discreto si dimostra che:
Ex =∑
i
pixi (1.16)
La media condizionata di una v.a. assunto l’eventoM e definita come:
Ex|M =∫ ∞
−∞xf(x|M)dx. (1.17)
Considerando la v.a. y = g(x) si dimostra che:
Ey =∫ ∞
−∞yfy(y)dy =
∫ ∞
−∞g(y)fx(x)dx (1.18)
Generalizzando la formula della media in (1.15) si definiscono le seguenti grandezze.
• Momentimn = Exn =
∫ ∞
−∞xnf(x)dx (1.19)
• Momenti centraliµn = E(x− η)n =
∫ ∞
−∞(x− η)nf(x)dx (1.20)
Il momento centrale di ordine n = 2 viene chiamato varianza della v.a. e viene di solitoindicato con il simbolo σ2.
8

Tabella 1.1: Momenti di ordine k di alcune distribuzioni di probabilita.
DISTRIBUZIONE MOMENTO DI ORDINEk, Exk, k ≥ 0
Uniforme 1k+1
bk+1−ak+1
b−a
Gaussiana 1√π
∑kn=0(npari)
(k
k−n
)2n/2ηk−n
x σnxΓ(
n+12
)di Rayleigh (2σ2)k/2Γ
(1 + k
2
)Esponenziale 2kσ2kk!
di Rice (2σ2)k/2e−s2/2σ2Γ(1 + k
2
)1F1
(1 + k
2, 1; s2
2σ2
)Lognormale ekηe
12k2σ2
Binomiale∑K−1
n=0 nk(
K−1n
)pnqK−1−n
NOTA: Γ(x) indica la funzione gamma (1.59) e 1F1(α, β;x) la funzione ipergeometrica confluente (1.58).
1.4.1 Funzione caratteristica e funzione generatrice di una v.a.
La funzione caratteristica di una v.a. di tipo continuo e definita come:
Ξ(ω) =∫ +∞
−∞f(x)ejωxdx. (1.21)
Siccome f(x) ≥ 0 si ha |Ξ(ω)| ≤ Ξ(0) = 1. Ponendo jω = s si ottiene la funzione:
Ξ(s) =∫ +∞
−∞f(x)esxdx. (1.22)
Infine la funzione Υ(ω) = ln Ξ(ω) e detta seconda funzione caratteristica della v.a. x.Una volta introdotte le funzioni caratteristiche di una v.a. e possibile formulare il Teorema deimomenti. Si dimostra che:
Ξ(s) =∞∑
n=0
mn
n!sn. (1.23)
Dalla (1.23) si ricava: Ξ′(0) = m1 = η e Ξ′′(0) = m2 = η2 + σ2. Per una v.a. di tipo discreto lafunzione caratteristica e definita come:
Λ(ω) =∑
i
piejωxi . (1.24)
Per v.a. di tipo discreto che assumono valori interi, la funzione generatrice dei momenti edefinita come:
Γ(z) =∑
i
pizi. (1.25)
Anche per le v.a. di tipo discreto vale il teorema dei momenti e si ha: Γ′(1) = En eΓ′′(1) = En2 − En. Per ciascuna delle variabili aleatorie descritte nel Par. la Tabella 1.1mostra riassuntivamente i momenti di ordine k, ossia Exk.
1.4.2 Cumulanti
Per definizione, i cumulanti di una v.a. di tipo continuo si ottengono dalla equazione:
λn =dnΥ(s)
dsn. (1.26)
9
in cui Υ(s) = ln Ξ(s). Si dimostra che:
Υ(s) = λ1s +1
2λ2s
2 + .... +1
n!λnsn + ... (1.27)
ed inoltre si ha: λ0 = 0, λ1 = η e λ2 = σ2.
10

1.4.3 Esempi di funzioni di distribuzione e densita di probabilita
Nel seguito sono considerate alcune variabili aleatorie reali scalari di particolare rilievo nelcampo della Ingegneria delle Telecomunicazioni. Per esse si riportano la densita di probabilita,p(x), la funzione cumulativa, P (x), il valor medio, ηx, la varianza, σ2
x, ed infine la funzionecaratteristica, Ξ(ω).
a) Distribuzione uniformeUna v.a. si dice uniformemente distribuita nell’intervallo a ≤ x ≤ b se ha densita di
probabilita rettangolare nell’intervallo, ossia:
p(x) =1
b− a, a ≤ x ≤ b, (1.28)
e nulla altrimenti. La funzione cumulativa di probabilita risulta:
P (x) =x− a
b− a, a ≤ x ≤ b, (1.29)
e P (x) = 0 per x < a, P (x) = 1 per x > b.Dalle definizioni di v.m., varianza e f.c. si ricava rispettivamente:
ηx =1
2(a + b), (1.30)
σ2x =
1
12(b− a)2, (1.31)
Ξ(ω) =ejωb − ejωa
jω(b− a). (1.32)
b) Distribuzione gaussiana (o normale)Una v.a. si dice gaussiana o normale se ha d.d.p.:
p(x) =1√
2πσx
e− (x−ηx)2
2σ2x , (1.33)
ove i parametri ηx e σ2x rappresentano rispettivamente il v.m. e la varianza di x. Essendo com-
pletamente definita da tale coppia di parametri, la d.d.p. normale viene talvolta simbolicamenteindicata come ℵ(ηx, σ2
x).La sua funzione cumulativa di probabilita non puo essere espressa in forma chiusa. Conviene
a tal fine definire la funzione d’errore:
erf (x)∆=
1√π
∫ x
−xe−t2 dt, (1.34)
e la funzione complementare d’errore:
erfc(x)∆= 1− erf(x) =
2√π
∫ ∞
xe−t2 dt, (1.35)
Si osservi dalla (1.34) che la funzione integranda e la d.d.p. ℵ(0, 12).
Le due funzioni godono delle seguenti proprieta:
erf(−x) = −erf(x), (1.36)
11

erf(−∞) = −1 erf(0) = 0, erf(∞) = 1, (1.37)
erfc(−x) = 1− erf(−x) = 1 + erf(x) = 2− erfc(x), (1.38)
erfc(−∞) = 2, erfc(0) = 1, erfc(∞) = 0. (1.39)
Tenuto conto della (1.35) una forma compatta della c.d.p. gaussiana e percio la seguente:
P (x) = 1− 1
2erfc
(x− ηx√
2σx
). (1.40)
Infine la funzione caratteristica risulta:
Ξ(ω) = exp(jωηx −
1
2ω2σ2
x
). (1.41)
c) Distribuzione di RayleighUna v.a. a distribuzione di Rayleigh (di parametro σ) presenta d.d.p.:
p(x) =x
σ2e−
x2
2σ2 , x ≥ 0 (1.42)
e nulla altrimenti. La relativa c.d.p. risulta:
P (x) = 1− e−x2
2σ2 , x ≥ 0 (1.43)
e nulla altrimenti, mentre v.m. e varianza sono dati rispettivamente dalle seguenti relazioni:
ηx =
√π
2σ, (1.44)
σ2x =
(2− π
2
)σ2. (1.45)
Non si dispone dell’espressione in forma chiusa della funzione caratteristica di una v.a. diRayleigh:
Ξ(ω) = 2∫ +∞
0u e−(u−2jωσ2)udu. (1.46)
d) Distribuzione esponenzialeUna v.a. a distribuzione esponenziale (di parametro σ) presenta d.d.p.:
p(x) =1
2σ2e−
x2σ2 , x ≥ 0 (1.47)
e nulla altrimenti. La relativa c.d.p. risulta:
P (x) = 1− e−x
2σ2 , x ≥ 0 (1.48)
e nulla altrimenti, mentre v.m. e varianza sono dati rispettivamente dalle seguenti relazioni:
ηx = 2σ2 (1.49)
σ2x = 4σ4, (1.50)
12

e la funzione caratteristica si esprime come:
Ξ(ω) =1
1− 2jωσ2(1.51)
e) Distribuzione di RiceUna v.a. a distribuzione di Rice (di parametri σ, s), che puo essere genericamente definita
nel caso di N processi gaussiani statisticamente indipendenti, per N = 2, presenta la d.d.p.:
p(x) =x
σ2e−
x2+s2
2σ2 I0
(s x
σ2
), x ≥ 0 (1.52)
e nulla altrimenti. Nella (1.52) I0(x) e la funzione di Bessel modificata di ordine n = 0:
In(x)∆=
1
π
∫ π
0ex cos ϑ cos(nϑ)dϑ, n = 0, 1, 2, . . . (1.53)
La relativa c.d.p. puo essere ricondotta in termini della funzione Q di Marcum:
Q(a, b)∆=∫ ∞
bx e−
12(x2+a2)I0(ax)dx = e−
a2+b2
2
∞∑k=0
(a
b
)k
Ik(ab) 0 < a < b, (1.54)
ottenendo:
P (x) = 1−Q(
s
σ,,x
σ
), x ≥ 0 (1.55)
e nulla altrimenti, mentre v.m. e varianza sono dati rispettivamente dalle seguenti relazioni:
ηx =
√π
2σ e−s2/2σ2
1F1
(3
2, 1;
s2
2σ2
)=
=π
2σe−s2/4σ2
[(1 +
s2
2σ2
)I0
(s2
4σ2
)+
s2
2σ2I1
(s2
4σ2
)], (1.56)
σ2x = Ex2 − η2
x = 2σ2
(1 +
s2
2σ2
)− η2
x, (1.57)
dove 1F1(α, β; x) e la funzione ipergeometrica confluente:
1F1(α, β; x)∆=
Γ(β)
Γ(α)
∞∑n=0
xn
n!
Γ(α + n)
Γ(β + n), β 6= 0,−1,−2, . . . (1.58)
che per la sua definizione necessita della funzione gamma, Γ(x):
Γ(x)∆=∫ ∞
0tx−1e−tdt, x > 0. (1.59)
Non si dispone dell’espressione in forma chiusa della funzione caratteristica di una v.a. di Rice:
Ξ(ω) = σ2∫ +∞
0u I0(σ
2vu)e−σ2
2(u2+v2−2jωu)du. (1.60)
con v = sσ2 .
f) Distribuzione lognormaleUna v.a. a distribuzione lognormale (di parametri η, σ) presenta d.d.p.:
p(x) =1√
2πσxe−
12(
lnx−ησ )
2
, x ≥ 0, (1.61)
13

ed altrimenti nulla, mentre la c.d.p. risulta:
P (x) = 1− 1
2erfc
(ln x− η√
2σ
), x ≥ 0, (1.62)
ed altrimenti nulla. Il v.m. e la varianza sono rispettivamente espressi da:
ηx = eηe12σ2
, (1.63)
σ2x = e2η(e2σ2 − eσ2
), (1.64)
ed infine la funzione caratteristica, che non e esprimibile in forma chiusa, risulta:
Ξ(ω) =1√2πσ
∫ +∞
−∞e−(
u−η√2σ
)2
+jω exp(u)du. (1.65)
g) Distribuzione binomialeE una distribuzione di v.a. discreta che puo assumere K valori interi. Possiede d.d.p. e
c.d.p. rispettivamente date dalle (??) (??) con xk = k, k = 0, 1, . . . , K − 1, e:
Pk = Probx = k =
(K − 1
k
)pkqK−1−k, (1.66)
ove(
nk
)e il coefficiente binomiale e p, q e una coppia di numeri tale che p + q = 1. Si osservi
che q e p rappresentano i valori forniti dalla (1.66) rispettivamente per k = 0 e 1, posto che lav.a. discreta sia suscettibile di assumere K = 2 valori soltanto. Inoltre il v.m. e la varianzarisultano rispettivamente:
ηx = K p, (1.67)
σ2x = K p q. (1.68)
Infine, la funzione caratteristica risulta:
Ξ(ω) = (q + pejω)K . (1.69)
h) Distribuzione binaria (o ’testa e croce’)In effetti si tratta della distribuzione binomiale per K = 2, ma e un caso sufficientemente
importante da venire menzionato a parte. Dalla (??) discende P1 = p e P0 = q = 1− p. Inoltrev.m. e varianza risultano rispettivamente dalle (1.67), (1.68):
ηx = 2 p, (1.70)
σ2x = 2 p (1− p). (1.71)
Se si pone x0 = 0, x1 = 1 la d.d.p. (??) risulta:
px(x) = (1− p)δ(x) + pδ(x− 1), (1.72)
mentre la c.d.p. (??) e nulla per x < 0, pari a 1− p per 0 < x < 1 e pari a 1 per x > 1.
14

1.5 Funzioni di variabile aleatoria
Si consideri la v.a. x e una funzione g(x) in cui x e una variabile reale. L’espressione y = g(x)definisce una nuova v.a. in questo senso: dato ζ ∈ S, x(ζ) e un numero e g(x(ζ)) e una altronumero specificato in termini di x(ζ) e di g(x). Questo nuovo numero e il valore y(ζ) assegnatoalla variabile y. Per un valore di y, i valori di x per cui g(x) ≤ y formano un insieme sull’assey indicato con Iy.Affinche g(x) sia una v.a. la funzione g(x) deve soddisfare le seguenti proprieta:
1. Il suo dominio deve includere l’intervallo di variabilita della v.a. x;
2. La funzione g(x) deve essere di tipo Baire e cio signifca che per ogni valore di y, l’insiemeIy deve essere formato dall’unione e intersezione di un numero contabile di intervalli. Soloin questo caso y ≤ y e un evento.
3. Gli eventi y = ±∞ devono avere probabilita nulla.
1.5.1 Calcolo della funzione di distribuzione
La procedura per esprimere la funzione di distribuzione cumulativa Fy(y) della v.a. y = g(x)in termini della funzione di distribuzione cumulativa Fx(x) della v.a. x e della funzione g(x),puo essere riassunta come segue.
• Occorre determinare dapprima l’insieme Iy sull’asse x tale che g(x) ≤ y.
• Occorre determinare la probabilita che la v.a. x assuma valori in questo insieme.
1.5.2 Calcolo della funzione di densita di probabilita
Per determinare la densita di probabilita della v.a. y = g(x), fy(y), in termini della funzionedi densita di x, fx(x), e di g(x) si opera come indicato di seguito.
• Se un insieme L non e nell’intervallo della funzione g(x) ovviamente fy(y) = 0 per y ∈ L.Occorre quindi considerare solo quei valori di y per cui esiste qualche valore di x tale cheg(x) = y.
• Per calcolare fy(y) si risolve l’equazione y = g(x). Indicando con xn le sue radici reali(y = g(x1) = ... = g(xn) = ...)si dimostra che:
fy(y) =∑
i
fx(xi)
g′(xi)(1.73)
in cui g′(x) indica la derivata prima di g(x).
15

1.6 Sequenze di variabili aleatorie
La trattazione precedente si riferiva al caso di una sola v.a.. In questo paragrafo vengonogeneralizzate le grandezze di cui prima al caso di n v.a.Si definisce vettore aleatorio X = [x1, ...,xn] un vettore che ha per componenti delle v.a.La probabilita che X giaccia all’interno di una regione D dello spazio n-dimensionale e pari a:
PX ∈ D =∫D
f(X)dX, (1.74)
in cui
f(X) = f(x1, ..., xn) =∂nF (x1, ..., xn)
∂x1, ..., ∂xn
, (1.75)
e la funzione di densita congiunta delle v.a. xi e
F (X) = F (x1, ..., xn) = Px1 ≤ x1, ...,xn ≤ xn. (1.76)
Se in F (x1, ..., xn) al posto di alcune v.a. si mette +∞ si ottiene la funzione di distribuzionecongiunta delle v.a. rimaneti. Analogamente, integrando f(x1, ..., xn) rispetto ad alcune varia-bili si ottiene la funzione di sensita congiunta delle v.a. rimanenti.
1.6.1 Trasformazioni di variabili aleatorie
Siano date k funzioni g1(X), ..., gk(X) e si creano le seguenti v.a.: y1 = g1(X), ...,yk = gk(X).Se k < n si determina dapprima la densita delle n v.a. y1, ...,yk,xk+1, ...,xn e poi si integrasulle variabili xi per eliminarle. Se k > n si possono esprimere le v.a yn+1, ...,yk in terminidi y1, ...,yn. Di conseguenza e sufficiente assumere che k = n. In questo caso per ricavare lafunzione di densita congiunta fy(y1, ..., yn) del vettore aleatorio Y = [y1, ...,yn] occorre primarisolvere il sistema di equazioni:
g1(X) = y1, ..., gn(X) = yn. (1.77)
Se il sistema in (1.77) non ha soluzioni allora fy(y1, ..., yn) = 0. Se il sistema ha una solasoluzione si ha:
fy(y1, ..., yn) =fx(x1, ..., xn)
|J(x1, ..., xn)|(1.78)
in cui
J(x1, ..., xn) =
∣∣∣∣∣∣∣∂g1/∂x1 ... ∂g1/∂xn
... ... ...∂gn/∂x1 ... ∂gn/∂xn
∣∣∣∣∣∣∣ (1.79)
e il Jacobiano della trasformazione.
16

1.6.2 Derivazione alternativa
TRASFORMAZIONI DI VARIABILI ALEATORIE
Spesso si incontrano variabili aleatorie funzionalmente legate e si pone il problema di ricavarela densita di probabilita di una, ammessa la conoscenza della d.d.p. dell’altra e della relazionefunzionale tra le due. Indichiamo con x la v.a. dotata di d.d.p. nota px(x), con y la v.a.con d.d.p. py(y) di cui si ricerca l’andamento, e infine con y = f(x) la funzione che lega ledue variabili. Se f(x) e monotona crescente si ha evidentemente l’uguaglianza della probabilitadell’evento elementare:
py(y)dy = px(x)dx, (1.80)
e di conseguenza:
py(y) = px(x)
(dy
dx
)−1
=px(x)
f ′(x). (1.81)
Ad esempio consideriamo una variabile aleatoria x ≥ 0 cui applichiamo la trasformazionequadratica f(x) = x2. Poiche f
′(x) = 2x, si ha:
py(y) =1
2√
ypx(√
y), y ≥ 0, (1.82)
e altrimenti nulla. Nel caso di v.a. x di Rayleigh di parametro σ , sostituendo la (1.42) nella(1.82) si ha:
py(y) =1
2σ2e−
y
2σ2 , y ≥ 0 (1.83)
ossia la v.a. y e del tipo esponenziale (1.47) con parametro σ. Nell’altro caso notevole di v.a.x lognormale (1.61) con parametri η, σ, la (1.82) porge:
py(y) =1
2√
2πσye−
12(
ln y−2η2σ )
2
, y ≥ 0, (1.84)
la quale mostra che dopo la trasformazione la v.a. si mantiene a distribuzione lognormale conparametri η
′= 2η e σ
′= 2σ.
Volendo estendere la (1.81) in modo tale da includere il caso di funzioni monotone decre-scenti, si ha:
py(y) = px(x)
∣∣∣∣∣∣(
dy
dx
)−1∣∣∣∣∣∣ = px(x)
|f ′(x)|′(1.85)
ed infine, per le funzioni che possano essere suddivise in un numero arbitrario m di segmentimonotoni (tra crescenti e decrescenti), si ha:
py(y) =m∑
i=1
px(xi)
∣∣∣∣∣∣(
dy
dx
)−1
xi
∣∣∣∣∣∣ =m∑
i=1
px(xi)
|f ′(xi)|, (1.86)
ove xi = f−1(y), i = 1, 2, . . . ,m.Un’ulteriore utile estensione della formula di trasformazione di v.a. si applica al caso di
variabili vettoriali. Siano x = [x1, x2, . . . , xn]T e y = [y1, y2, . . . , yn]T due vettori aleatoririspettivamente dotati di funzioni densita di probabilita px(x) e py(y). Siano inoltre assegnate
17

le funzioni yi = fi(x), con i = 1, 2, . . . , n. Limitandosi a considerare il caso di relazioni funzionalimonotone (come per la (1.85)), ciascuna delle funzioni fi risulta invertibile, ossia:
xi = f−1i (y), i = 1, 2, . . . , n. (1.87)
Allora la trasformazione cercata risulta:
py(y) = |J|px(x), con x = f−1(y), (1.88)
ove |J| e il determinante Jacobiano della trasformazione, ossia il determinante della matrice:
J =
∂f−1
1
∂y1. . . ∂f−1
n
∂y1
. . . . . . . . .∂f−1
1
∂yn. . . ∂f−1
n
∂yn
. (1.89)
A titolo di esempio consideriamo la trasformazione lineare del tipo:
y = Ax (1.90)
ove A e una matrice invertibile n× n. In tal caso detta B con elementi bij, i, j = 1, 2, . . . , n, lamatrice inversa della matrice A, ossia B = A−1, risulta:
∂xi
∂yj
= bij, i, j = 1, 2 . . . , n, (1.91)
ossia proprio J = B. Pertanto il determinante Jacobiano della trasformazione e |J| = 1/|A|,pari cioe all’inverso del determinante della matrice A. In definitiva percio, applicando la (1.88),si ha:
py(y) =1
|A|px(A
−1y). (1.92)
Per quanto riguarda la trasformazione della c.d.p. la py(y) della v.a. y = f(x) e la probabilitadell’evento y ≤ y composto dagli eventi y = f(x) in tal modo:
Py(y) = Py ≤ y = Pf(x) ≤ y. (1.93)
Per la determinazione della py(y) e possibile utilizzare anche la funzione caratteristica. Dalla(??) si puo scrivere la funzione caratteristica:
Ξy(ω)∆= Eejωx =
∫ +∞
−∞ejωy py(y) dy = E
ejωg(x)
=∫ +∞
−∞ejωf(x) px(x) dx. (1.94)
Se quindi l’ultimo integrale della (1.94) puo essere riscritto nella forma:∫ +∞
−∞ejωy h(y) dy (1.95)
segue che:fy(y) = h(y). (1.96)
18

1.6.3 Indipendenza di variabili aleatorie
Le v.a. xi sono mutuamente indipendenti se gli eventi xi ≤ xi sono mutuamente indipendenti.In questo caso si ha:
F (x1, ..., xn) = F (x1) · · ·F (xn), (1.97)
e inoltref(x1, ..., xn) = f(x1) · · · f(xn). (1.98)
Le v.a. sono indipendenti a gruppi se ad esempio:
f(x1, ..., xn) = f(x1, ..., xm) · · · f(xm+1, ..., xn). (1.99)
La (1.99) si riferisce al caso di due gruppi di v.a. ma puo essere facilmente generalizzata ad unnumero di gruppi qualunque.
1.6.4 Medie, varianze e covarianze
Si consideri la v.a., y = g(x1, ...,xn), generalizzando il teorema della media si ha:
Ey =∫ +∞
−∞· · ·
∫ +∞
−∞g(x1, ..., xn)f(x1, ..., xn)dx1 · · · dxn. (1.100)
Quando si hanno piu variabili aleatorie e possibile definire la covarianza tra due qualunque v.a.complesse come:
Cij = E(xi − ηi)(xj − ηj) = Exix∗j − ExiEx∗j. (1.101)
La varianza della v.a. i-esima si ottiene calcolando Cii. Le v.a. xi sono dette incorrelate seCij = 0 per i 6= j.La matrice Cn = Cij e detta matrice di covarianza. La matrice Rn = Rij in cui Rij =Exix
∗j e detta matrice di correlazione.
1.6.5 Funzioni di densita condizionali
Ragionando in modo analogo al caso di una sola v.a. si puo scrivere che la densita condizionatadelle v.a. xk+1, ...,xn assumendo x1, ...,xk ha l’espressione:
f(xn, ..., xk+1|xk, ..., x1) =f(x1, ..., xn)
f(x1, ..., xk). (1.102)
La corrispondente funzione di distribuzione si ottiene per integrazione ossia:
F (xn, ..., xk+1|xk, ..., x1) =∫ xn
−∞· · ·
∫ xk+1
−∞f(zn, ..., zk+1|xk, ..., x1)dzk+1 · · · dzn. (1.103)
A partire dalle relazioni precedenti, si definiscono i momenti condizionati.
1.6.6 Funzione caratteristica
La funzione caratteristica di un vettore aleatorio e definita come:
Ξ(Ω) = EejΩX′ = Eej∑
iωixi, (1.104)
in cui Ω = [ω1, ..., ωn] e X = [x1, ...,xn].
19
1.7 Variabili aleatorie complesse
Fino ad ora si e parlato soltando di v.a. reali. Una v.a. complessa e una v.a. del tipo z = x+jyin cui x e y sono due v.a. reali. Le statistiche di un insieme di v.a. complesse zi = xi + jyi
e i = 1, .., n, sono determinabili sulla base della distribuzione congiunta delle v.a. xi e yi,i = 1, ..., n indicata con f(x1, y1, x2, y2, ..., xn, yn). Le variabili aleatorie zi sono statisticamenteindipendenti se:
f(x1, y1, x2, y2, ..., xn, yn) = f1(x1, y1)f2(x2, y2) · · · fn(xn, yn). (1.105)
Si osservi che la (1.105) rappresenta un particolare caso di indipendenza a gruppi di variabilialeatorie.
20
Capitolo 2
Processi stocastici - concetti generali
2.1 Definizione di processo stocastico
Nei paragrafi precedenti si e visto che una v.a. x e una regola per assegnare ad ogni risultato ζdi un esperimento S un numero x(ζ). Un processo stocastico x(t), e una regola per assegnaread ogni risultato di un esperimento ζ, una funzione x(t, ζ) in cui t e la variabile temporale.In base alla definizione, un processo stocastico rappresenta una famiglia di funzioni del tempoche dipendono dal parametro ζ o equivalentemente che sono funzioni di t, ζ. Il dominio dellavariabile ζ sono tutti i possibili esiti dell’esperimento S e il dominio di t e quello dei numerireali.
• Se l’asse dei tempi e reale, si parla di un processo stocastico tempo continuo.
• Se l’asse dei tempi coincide con l’insieme dei numeri interi si parla di di un processostocastico tempo discreto.
Un processo stocastico tempo discreto viene indicato anche come sequenza di v.a.Il processo stocastico e detto a stati discreti se i valori che x(t, ζ) puo assumere in ogni istantee contabile altrimenti il processo stocastico e detto a stati continui.Per semplicita di notazione, per indicare un processo stocastico si puo anche omettere la di-pendenza dall’evento ζ e di conseguenza il processo x(t, ζ) viene semplicemente indicato comex(t).In base alla definizione, un processo stocastico x(t) ammette le seguenti interpretazioni:
• ζ, t sono variabili: x(t) e un insieme di funzioni x(t, ζ);
• ζ e fisso: x(t) e una funzione del tempo (un campione temporale (sample) del processo -un segnale);
• t e fisso: x(t) e una variabile aleatoria uguale allo stato del processo all’istante t.
• ζ, t sono fissi: il processo x(t) e un numero.
Nel seguito, l’interpretazione da assegnare a x(t) dipendera dal contesto.Esempio:Un esempio classico di processo stocastico e il seguente: x(t, ζi) = r(ζi) cos(ωt+φ(ζi))
o, equivalentemente, omettendo la dipendenza dagli eventi, x(t) = r cos(ωt + φ) in cui r e φsono gli elementi aleatori.
21
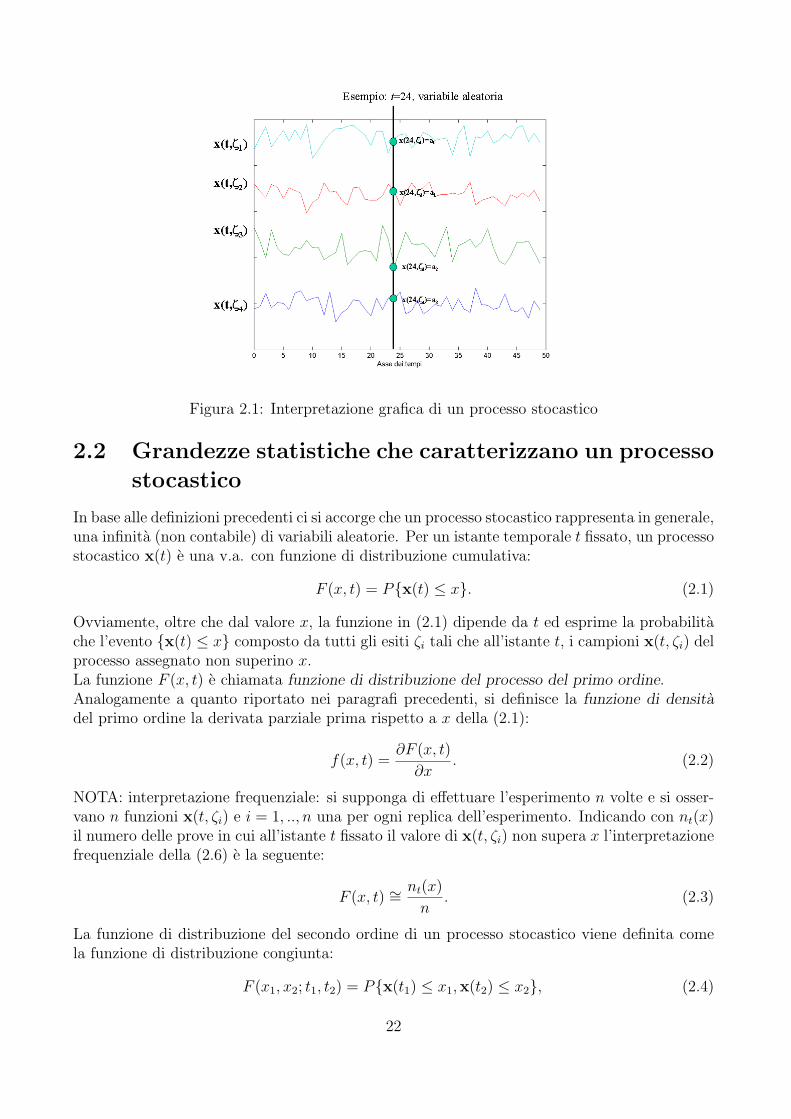
Figura 2.1: Interpretazione grafica di un processo stocastico
2.2 Grandezze statistiche che caratterizzano un processo
stocastico
In base alle definizioni precedenti ci si accorge che un processo stocastico rappresenta in generale,una infinita (non contabile) di variabili aleatorie. Per un istante temporale t fissato, un processostocastico x(t) e una v.a. con funzione di distribuzione cumulativa:
F (x, t) = Px(t) ≤ x. (2.1)
Ovviamente, oltre che dal valore x, la funzione in (2.1) dipende da t ed esprime la probabilitache l’evento x(t) ≤ x composto da tutti gli esiti ζi tali che all’istante t, i campioni x(t, ζi) delprocesso assegnato non superino x.La funzione F (x, t) e chiamata funzione di distribuzione del processo del primo ordine.Analogamente a quanto riportato nei paragrafi precedenti, si definisce la funzione di densitadel primo ordine la derivata parziale prima rispetto a x della (2.1):
f(x, t) =∂F (x, t)
∂x. (2.2)
NOTA: interpretazione frequenziale: si supponga di effettuare l’esperimento n volte e si osser-vano n funzioni x(t, ζi) e i = 1, .., n una per ogni replica dell’esperimento. Indicando con nt(x)il numero delle prove in cui all’istante t fissato il valore di x(t, ζi) non supera x l’interpretazionefrequenziale della (2.6) e la seguente:
F (x, t) ∼=nt(x)
n. (2.3)
La funzione di distribuzione del secondo ordine di un processo stocastico viene definita comela funzione di distribuzione congiunta:
F (x1, x2; t1, t2) = Px(t1) ≤ x1,x(t2) ≤ x2, (2.4)
22

in cui x(t1) e x(t2) sono ovviamente delle variabili aleatorie. La funzione di densita di probabilitacorrispondente e per definizione pari a:
f(x1, x2; t1, t2) =∂2F (x1, x2; t1, t2)
∂x1∂x2
. (2.5)
Si osserva che ad esempio: F (x1; t1) = F (x1,∞; t1, t2) e che f(x1; t1) =∫∞−∞ f(x1, x2; t1, t2)dx2.
Per definizione la funzione di distribuzione dell’n-esimo ordine del processo stocastico e si indicacon F (x1, ..., xn; t1, ..., tn) e rappresenta la funzione cumulativa delle n v.a. x1, ...,xn.
2.3 Proprieta statistiche di un processo stocastico
Le proprieta statistiche di un processo stocastico reale x(t) sono pienamente descritte in terminidella funzione di distribuzione cumulativa di n-esimo ordine:
F (x1, ..., xn; t1, ..., tn) = Px(t1) ≤ x1, ...,x(tn) ≤ xn. (2.6)
La conoscenza della funzione in (2.6) per ogni valore di n consente di determinarne sempre lecaratteristiche statistiche. Come si vedra in seguito per molte applicazioni sono di interessesoltanto alcune grandezze ottenute calcolando medie del processo.Le statistiche congiunte di due processi stocastici x(t) e y(t) sono calcolabili a partire dallafunzione di distribuzione congiunta delle v.a. x(t1), ...,x(tn),y(t′1), ...,y(t′n).Un processo stocastico complesso z(t) = x(t) + jy(t) viene descritto completamente dalla fun-zione di distribuzione congiunta dei processi reali componenti x(t),y(t).Un processo stocastico vettoriale n-dimensionale e rappresentabile con una famiglia di n pro-cessi stocastici reali e/o complessi.
2.4 Momenti di un processo stocastico
2.4.1 Medie
La media η(t) di un processo stocastico tempo continuo x(t) coincide con il valore medio dellav.a. x(t) ossia:
η(t) = Ex(t) =∫ ∞
−∞xf(x, t)dx. (2.7)
2.4.2 Autocorrelazione e autocovarianza di processi stocastici
La funzione di autocorrelazione R(t1, t2) di un processo stocastico reale x(t) e il valore attesodella v.a. x(t1)x(t2) ottenuta come prodotto delle v.a. x(t1) e x(t2) ossia:
R(t1, t2) = Ex(t1)x(t2) =∫ ∞
−∞
∫ ∞
−∞x1x2f(x1, x2; t1, t2)dx1dx2. (2.8)
Il valore della funzione R(t1, t2) lungo la diagonale t1 = t2 = t viene indicata come potenzamedia P del processo x(t) ossia:
P = R(t, t) = Ex2(t). (2.9)
23

La funzione di autocovarianza C(t1, t2) di un processo reale x(t) e pari alla covarianza delle v.a.x(t1) e x(t2) ossia:
C(t1, t2) = E(x(t1)− η(t1)x(t2)− η(t2) = R(t1, t2)− η(t1)η(t2). (2.10)
Il valore di C(t1, t2) lungo la diagonale t1 = t2 = t viene indicata come la varianza del processostocastico x(t) 1.Esempi:
• un esempio molto particolare di processo stocasticoe rappresentato da un semplice deter-ministico x(t) = g(t) in cui g(t) e una funzione del tempo perfettamente nota. In questocaso si ha: η(t) = g(t), R(t1, t2) = g(t1)g(t2).
• si supponga che x(t) sia un processo con η(t) = 3 e R(t1, t2) = 9 + 4e−0.2|t1−t2|. Si devedeterminare la varianza e la covarianza delle v.a. z = x(5) e w = x(8).In base alle definizioni si ha: Ez = η(5) = 3 e Ew = η(8) = 3, mentre Ez2 =R(5, 5) = 13 ed Ew2 = R(8, 8) = 13. infine Ezw2 = R(5, 8) = 11.195. In questo casoz e w hanno la stessa varianza σ2 = 4 e la loro covarianza C(5, 8) vale C(5, 8) = 2.195.
Le funzioni di autocorrelazione e di autocovarianza di un processo stocastico complesso sonodate per definizione:
R(t1, t2)∆= Rxx(t1, t2) = Ex(t1)x
∗(t2) (2.11)
eC(t1, t2)
∆= Cxx(t1, t2) = R(t1, t2)− η(t1)η
∗(t2). (2.12)
Un processo n(t) e definito processo bianco quando C(t1, t2) = 0 per t1 6= t2. La funzione diautocovarianza di un processo bianco deve essere del tipo C(t1, t2) = q(t1)δ(t1 − t2) e q(t) ≥ 0.Di solito un processo bianco che ha anche media nulla viene detto rumore bianco. Infine sidefinisce la funzione di autocorrelazione coniugata del processo come:
R(t1, t2)∆= Rxx∗(t1, t2) = Ex(t1)x(t2) (2.13)
1L’importanza della funzione di autocorrelazione sara sottolineata in seguito quando si parlera di trasforma-zioni lineari di processi stocastici. Indicando con x(t) il processo in ingresso ad un sistema e con yt) il relativoprocesso in uscita, si osservera che per calcolare ad esempio la potenza del processo di uscita non e sufficienteconoscere la potenza del processo di ingresso ma e necessaria la funzione di autocorrelazione del processo diingresso.
24

2.4.3 Proprieta delle funzioni di autocorrelazione e di autocovarian-za
Alcune rilevanti proprieta della funzione di autocovarianza sono illustrate di seguito.
Funzione di autocorrelazione:
• R(t2, t1) = Ex(t2)x∗(t1) = R∗(t1, t2). La dimostrazione di questo fatto e ovvia e si basa
direttamente sulla definizione della funzione di autocorrelazione di un processo.
• P (t) = R(t, t) = E|x(t)|2 ≥ 0 e viene indicata come potenza del processo.
• La funzione di autocorrelazione di un processo stocastico x(t) e una funzione positivadefinita. Cio significa che per ogni coppia di numeri (ai, aj) si ha:
∑i,j aia
∗jR(ti, tj) ≥ 0.
La dimostrazione di questo fatto e immediata e parte dalla seguente relazione:
0 ≤ E|∑
i
aix(t)|2 =∑i,j
aia∗jEx(ti)x
∗(tj).
Espandendo il termine all’interno dell’operatore di media si perviene alla relazione cercata.Si puo dimostrare anche l’inverso. Data una funzione R(t1, t2) definita positiva si puotrovare un processo x(t) con funzione di autocorrelazione R(t1, t2).
Per quanto riguarda la funzione di autocovarianza di un processo x(t) si osserva che C(t1, t2)puo anche essere definita come la funzione di correlazione del processo stocastico centrale:x(t) = x(t)− η(t).Si definisce anche il coefficiente di correlazione del processo come:
r(t1, t2) =C(t1, t2)√
C(t1, t1)C(t2, t2). (2.14)
Il coefficiente di correlazione r(t1, t2) puo anche essere visto come autocovarianza del seguente
processo normalizzato x(t) = x(t)/√
C(t, t) (dimostrazione al lettore).
Infine per caratterizzare le proprieta statistiche congiunte di due processi x(t) e y(t) si defini-scono le funzioni di cross-correlazione Rxy(t1, t2), e di cross-covarianza Cxy(t1, t2) dei dueprocessi come:
Rxy(t1, t2) = Ex(t1)y∗(t2), (2.15)
eCxy(t1, t2) = Rxy(t1, t2)− ηx(t1)η
∗y(t2). (2.16)
In base alle definizioni in (2.15) e (2.16) si possono classificare i processi come riportato diseguito.
• Due processi x(t) e y(t) sono detti mutuamente ortogonali se Rxy(t1, t2) = 0 per ognicoppia di valori t1, t2.
• Due processi x(t) e y(t) sono detti incorrelati se Cxy(t1, t2) = 0 per ogni coppia di valorit1, t2.
Si osservi che i valori di un processo bianco n(ti) n(tj) sono incorrelati per ogni ti e ti 6= tj.
25

2.5 Processi tempo discreti
Considerando il processo tempo discreto x(n) in cui n e un intero, si possono estendere in manie-ra diretta le definizioni di media, di funzione di autocorrelazione, di funzione di autocovarianzae di cross-correlazione e di cross-covarianza. Ad esempio in questo caso si ha:
• Media: η(n) = Ex(n);
• Autocorrelazione: R(n1, n2) = Ex(n1)x∗(n2);
• Autocovarianza: C(n1, n2) = R(n1, n2)− η(n1)η∗(n2).
Un processo x(n) e bianco se C(n1, n2) = q(n1)δ(n1 − n2) in cui δ(n) e la funzione impulsonumerico. Ovviamente si ha che q(n) = R(n, n).Si supponga ora, che il processo tempo discreto x(n) sia ottenuto da un processo tempo continuox(t) mediante una operazione di campionamento con periodo T . In questo caso si ha:
• x(n) = x(t)|t=nT ;
• I momenti del processo tempo discreto possono essere determinati a partire da quelli delcorrispondente processo continuo x(t) attraverso le ovvie relazioni
η(n) = η(t)|t=nT , (2.17)
eR(n1, n2) = R(t1, t2)|t1=n1T,t2=n2T , (2.18)
Qualora si desideri ricostruire ad esempio la funzione di media del processo continuo apartire dalla funzione di media del processo discreto e necessario scegliere il periodo T inmodo che siano rispettate le condizioni del teorema del campionamento.
26

2.6 Classificazione dei processi stocastici
2.6.1 Processi stazionari
Un processo x(t) e detto stazionario in senso stretto se i processi x(t) e x(t + c) hanno lestesse caratteristiche statistiche per ogni valore dello scostamento temporale c.Due processi x(t) e y(t) sono congiuntamente stazionari se le statistiche congiunte di x(t)e y(t) sono le stesse dei processi x(t + c) e y(t + c). Premesso cio, un processo complessoz(t) = x(t) + jy(t) e stazionario se i processi x(t) e y(t) sono congiuntamente stazionari.Dalla definizione, un processo e stazionario se la funzione di densita ordine soddisfa la proprieta:
f(x1, ..., xn; t1, ..., tn) = f(x1, ..., xn; t1 + c, ..., tn + c) ∀c. (2.19)
per ogni valore di n.Dalla relazione (2.19) segue che per n = 1 la densita di probabilita del processo deve essereindipendente dall’istante di osservazione t, ossia:
f(x; t) = f(x). (2.20)
Se il processo e stazionario almeno di ordine n = 2, per la densita di probabilita del secondoordine si deve invece avere:
f(x1, x2; t2, t2) = f(x1, x2; t1 + c, t2 + c) = f(x1, x2, τ) con τ = t1 − t2. (2.21)
In base alla (2.21) si osserva che la densita congiunta delle v.a. x(t) e x(t + τ) e indipendentedalla variabile t.
2.6.2 Processi stazionari in senso lato
Un processo stocastico x(t) e detto stazionario in senso lato se sono soddisfatte le dueproprieta:
1. Ex(t) = η = costante;
2. Ex(t + τ)x∗(t) = Rx(τ) in cui τ e la distanza dell’istante t dall’istante t + τ .
A volte la funzione di autocorrelazione Rx(τ) viene anche scritta in forma simmetrica come:R(τ) = Ex(t + τ/2)x∗(t− τ/2).Assumendo τ = 0 si ha:
R(0) = E|x|2, (2.22)
e di conseguenza la potenza di un processo stazionario e indipendente da t ed e uguale a R(0).Ovviamente un processo stazionario in senso stretto e anche un processo stazionario in sensolato ma, in generale, non e vero il viceversa.
Esempio: si consideri il processo stazionario in senso lato con funzione di autocorrelazioneR(τ) = Ae−α|τ |. Occorre determinare E|x(8) − x(5)|2. Espandendo il termine all’internodella operazione di media si ottiene: E|x(8)− x(5)|2 = 2R(0)− 2R(3) = 2A(1− e−3α).
27

Si dimostra facilmente che la funzione di autocovarianza di un processo stazionario ha l’e-spressione:
C(τ) = R(τ)− |η|2, (2.23)
mentre il coefficiente di correlazione r(τ) ha l’espressione:
r(τ) = C(τ)/C(0). (2.24)
Due processi x(t) e y(t) sono congiuntamente stazionari in senso lato se la loro funzione dicross-correlazione dipende soltanto dalla differenza degli istanti temporali, τ = t1 − t2 ossia:
Rxy(t1, t2) = Rxy(τ) = Ex(t + τ)y∗(t). (2.25)
In questo caso la funzione di cross-covarianza ha l’espressione:
Cxy(τ) = Rxy(τ)− ηxη∗y . (2.26)
Esempio:Si consideri il processo stocastico x(t) = a cos ωt+b sin ωt. Si stabiliscano le condizioninecessarie e sufficienti affinche il processo sia stazionario in senso lato.La media del processo ha l’espressione: Ex(t) = Ea cos ωt + Eb sin ωt. Siccome questafunzione deve (per definizione) essere indipendente da t si deve necessariamente avere: Ea =Eb = 0. Assumendo che tale relazione sia verificata, affinche il processo sia stazionarioalmeno in senso lato si osserva dapprima che:
x(0) = a x(π/2ω) = b
e si deve avere Ex(0)2 = Ex(π/2ω)2 = R(0). Di conseguenza si deve assumere: Ea2 =Eb2 = σ2.Calcolando la funzione di autocorrelazione del processo si ha: R(t, t + τ) = σ2 cos ωτ +Eab sin ω(2t + τ). Di conseguenza, per togliere la dipendenza dal tempo t si deve ancheavere Eab = 0.
2.7 Proprieta delle funzione di autocorrelazione e di cross-
correlazione per processi stazionari
In questo paragrafo si analizzano in maggior dettaglio le proprieta delle funzioni di autocor-relazione e di cross-correlazione di processi stazionari e ciclostazionari almeno in senso lato eintrodotte nel precedente capitolo.Si rammenta che le funzioni di auto e di cross correlazione di due processi stazionari (almenoin senso lato) sono definiti come:
Rx(τ) = Ex(t + τ)x∗(t), (2.27)
eRxy(τ) = Ex(t + τ)y∗(t). (2.28)
Le funzioni di autocorrelazione e di cross-correlazione sono legate a quelle di covarianza e dicross-covarianza dalle relazioni:
Cx(τ) = Rx(τ)− |η|2, (2.29)
28
eCxy(τ) = Rxy(τ)− ηxη
∗y . (2.30)
Da queste definizioni discendono immediatamente le seguenti proprieta:
• Rx(−τ) = R∗x(τ) - simmetria hermitiana;
• Rxy(−τ) = R∗yx(τ);
• Se i processi x(t) e y(t) sono congiuntamente stazionari almeno in senso lato, allora ilprocesso z(t) = ax(t) + by(t) e stazionario almeno in senso lato, e la sua funzione diautocorrelazione ha l’espressione:
Rz(τ) = |a|2Rx(τ) + ab∗Rxy(τ) + a∗bRyx(τ) + |b|2Ry(τ).
In particolare, considerando il processo z(t) = x(t) + jy(t)in cui x(t) e y(t) sono reali, siha: Rz(τ) = [Rxx(τ) + Ryy(τ)]− j[Rxy −Ryx(τ)].
• Partendo dalla disuguaglianza di Schwartz si dimostra facilmente che:
|Rxy(τ)|2 ≤ Rx(0)Ry(0);
Assumendo x(t) = y(t) si ottiene che per un processo stazionario (almeno in senso lato)si deve sempre avere: |Rx(τ)| ≤ Rx(0).
• Se x(t) e un processo reale e si verifica che Rx(τ1) = Rx(0) per qualche valore di τ1 6= 0allora si deve avere che Rx(τ) e una funzione periodica di periodo τ1 ossia Rx(τ +mτ1) =Rx(τ).Se Rx(τ1) = Rx(0) per qualche valore di τ1 6= 0 si dimostra che Rx(τ) puo essere espressacome Rx(τ) = ejω0τw(τ) in cui w(τ) e una funzione periodica di periodo τ1 e ω0 e unvalore di frequenza.
• Se Rx(τ1) = Rx(τ2) = Rx(0) ma τ1 e τ2 sono incommensurati allora Rx(τ) e una costante.
• Se Rx(0) <∞ e Rx(τ) e continua per τ = 0 allora Rx(τ) e continua per ogni valore di τ .
29

2.7.1 Processi ciclostazionari
Un processo x(t) e detto ciclostazionario in senso stretto (o periodicamente stazionario)se le sue statistiche sono invarianti rispetto ad uno spostamento temporale multiplo intero diuna costante T detta periodo.In base alla definizione segue che la funzione di distribuzione di un processo ciclostazionariox(t) gode della proprieta:
F (x1, ..., xn; t1 + mT, ..., tn + mT ) = F (x1, ..., xn; t1, ..., tn) (2.31)
per ogni n e per ogni valore intero di m. Un processo ciclostazionario non e stazionario poichela proprieta di stazionarieta espressa dalla (2.31) e verificata non per tutti gli scostamenti tem-porali ma solo per scostamenti temporali c multiplo intero di una costante T ossia c = mT em = −∞, ...∞. Comunque, si osservi che il processo tempo discreto ottenuto campionando ilprocesso ciclostazionario con periodo T ossia y(nT ) = x(nT + c) e stazionario per ogni valoredi c (dimostrazione al lettore). Vale inoltre la seguente proprieta che lega i processi stazionaria quelli ciclostazionari.Proprieta: se x(t) e un processo ciclostazionario in senso stretto e θ e una v.a. uniforme nell’in-tervallo (0, T ) e indipendente dal processo x(t) allora il processo x(t) = x(t− θ) e stazionarioin senso stretto e la sua funzione di distribuzione di ordine n e uguale a:
F (x1, ..., xn; t1, ..., tn) =1
T
∫ T
0F (x1, ..., xn; t1 − α, ..., tn − α)dα. (2.32)
Procedendo in modo analogo al caso dei processi stazionari in senso lato, un processo x(t) eciclostazionario in senso lato se valgono le due relazioni:
1. η(t + nT ) = η(t) - la media e una funzione periodica di periodo T .;
2. Rx(t+mT + τ, t+mT ) = Rx(t+ τ, t) - la funzione di autocorrelazione del processo e unafunzione di due variabili t, τ ed e periodica nella variabile t con periodo t.
Si osservi che se il processo x(t) e ciclostazionario in senso stretto allora si ha f(x; t + mT ) =f(x; t) e f(x1, x2; t1 + mT, t2 + mT ) = f(x1, x2; t1, t2) e di conseguenza esso e anche ciclostazio-nario in senso lato. In generale, non vale il viceversa.Vale infine quest’altra proprieta.Proprieta: se il processo x(t) e ciclostazionario in senso lato, allora il processo traslato x(t) =x(t − θ) in cui θ soddisfa le proprieta di cui prima, e stazionario in senso lato con media efunzione di autocorrelazione pari a:
1. η = 1T
∫ T0 η(t)dt;
2. R(τ) = 1T
∫ T0 R(t + τ, t)dt.
Due processi ciclostazionari almeno in senso lato x(t) e y(t) sono congiuntamente ciclosta-zionari con periodo T se:
Rxy(t + τ, t) = Ex(t + τ)y∗(t), (2.33)
e una funzione periodica di periodo T .Prima di concludere questo paragrafo si osservi che siccome la media e la funzione di autocorre-lazione di un processo ciclostazionario in senso stretto o in senso lato sono funzioni periodiche
30

nella variabile tempo t queste possono essere sviluppate in serie di Fourier. In questo caso perla media del processo x(t) si ha:
η(t) =∞∑
n=−∞ηne
j2π ntT (2.34)
in cui ηn sono delle costanti e rappresentano i coefficienti dello sviluppo in serie di Fourier dellafunzione media. Per definizione essi sono dati dalla ben nota relazione:
ηn =1
T
∫ T/2
−T/2η(t)e−j2π nt
T dt. (2.35)
In modo analogo fissando un valore di τ , per la funzione di autocorrelazione del processociclostazionario in senso stretto o in senso lato si ha uno sviluppo in serie di Fourier del tipo:
Rx(t + τ, t) = Rx(t, τ) =∞∑
n=−∞R(n/T )
x (τ)ej2π ntT , (2.36)
I coefficienti Rn/T (τ) dipendono dal valore di τ selezionato e per definizione sono dati dalla bennota relazione:
R(n/T )x (τ) =
1
T
∫ T/2
−T/2Rx(t, τ)e−j2π nt
T dt. (2.37)
Il termine R(n/T )x (τ) viene detto anche funzione di correlazione ciclica di ordine n del processo
ciclostazionario.Si osservi che un processo stazionario in senso lato puo anche essere visto come un caso par-ticolare di un processo ciclostazionario quando si ha R(n/T )
x (τ) = 0 per ogni n 6= 0. In questocaso R(0)
x (τ) = Rx(τ) coincide con la funzione di correlazione del processo stazionario in sensolato.
2.7.2 Significato fisico della proprieta di ciclostazionarieta
Partendo dalla definzione di processo centrale, il generico processo x(t) puo essere sempre vistocome somma del processo centrale x(t) e della funzione di media η(t) ossia, x(t) = ηx(t)+ x(t).Nel caso di processi ciclostazionari, essendo la media ηx(t) una funzione periodica con periodoT essa puo essere decomposta in serie di Fourier e quindi e rappresentabile come somma dicomponenti armoniche a frequenze differenti. Di conseguenza, osservando il processo lungol’asse dei tempi, se x(t) e ciclostazionario con media non nulla esso e esprimibile come sommadi segnali armonici e di un processo residuo (per l’appunto il processo centrale). Per definizioneil processo centrale NON contiene componenti armoniche.Si consideri ora il processo yτ (t) = x(t)x(t + τ), se x(t) e un processo ciclostazionario, ancheil processo yτ (t) si puo esprimere come somma della sua media e del relativo processo centraley(t). In questo caso si ha:
yτ (t) = ηy,τ (t) + y(t). (2.38)
La media del processo yτ (t) contiene le componenti armoniche ed e una funzione periodicache coincide (ovviamente) con la funzione di autocorrelazione del processo x(t) indicata conRx(t, τ). Il processo centrale y(t) non contiene ovviamente alcuna componente periodica. Sipuo quindi scrivere:
yτ (t) = Rx(t, τ) + y(t) =∑α
Rαx(τ)ej2παt + y(t). (2.39)
31

Si osservi che l’intensita della componente armonica a frequenza α presente nel processo yτ (t)dipende dal valore dello scostamento temporale τ ed e proprio pari a Rα
x(τ). Cio fornisce ancheun significato fisico alla funzione di autocorrelazione ciclica di ordine α del processo ciclostazio-nario. Questi discorsi saranno approfonditi in seguito quando si parlera di trasformazioni nonlineari di processi e delle loro applicazioni.
32

2.8 Processi ergodici
2.8.1 Concetti generali
Un problema di notevole interesse nella teoria dei processi stocastici consiste nel cercare distimare le statistiche del processo a partire da dati sperimentali rappresentanti le realizzazionidel processo stesso. Si supponga ad esempio di voler determinare la media η(t) di un processox(t). A tal scopo si supponga di poter osservare contemporaneamente piu realizzazioni delprocesso 2 x(t, ζi) e si usi come stimatore della media η(t) l’operatore media di insieme, ossia:
η(t) ∼=1
n
∑i
x(t, ζi). (2.40)
Ovviamente, quando si dispone soltanto di una singola realizzazione del processo x(t, ζ), ci si
Figura 2.2: Calcolo della media stocastica: la media del processo viene calcolata a partire dapiu realizzazioni dell’esperimento.
chiede ad esempio se sia possibile ottenere la media del processo a partire dalla media temporaleoperata sulla singola realizzazione disponibile ossia:
x =< x(t, ζ) >∆= lim
T→∞
1
2T
∫ T
−Tx(t, ζ)dt. (2.41)
In generale, si osserva subito che non e possibile ottenere una stima di η(t) se questa dipendeda t. Considerando invece il caso in cui la media del processo e una costante, ossia η(t) = η,allora ci si chiede sotto quali condizioni si puo dire che x = η ?. La teoria della ergodicita deiprocessi stocastici stabilisce tali criteri.Vale la seguente definizione di processo ergodico: un processo x(t) e ergodico se le sue mediedi insieme sono uguali alle corrispondenti medie temporali.
2per realizzare cio si puo supporre di avere piu macchine “strutturalmente identiche” checontemporaneamente (parallelamente) realizzano l’esperimento nel tempo
33

Questa affermazione equivale ad assumere che, con probabilita 1, ogni statistica di x(t) puoessere determinata da una singola realizzazione x(t, ζ) del processo in esame 3.Siccome tutte le statistiche (media, funzione di autocorrelazione, cumulante etc..) di un pro-cesso possono essere ottenute come media al primo ordine di un nuovo processo funzione delprocesso di partenza (vedi dopo), assume rilevanza la necessita di poter stabilire i criteri per ilcalcolo della media di un generico processo x(t) a partire da una sua realizzazione.
2.8.2 Processo ergodico in media
Si consideri il processo x(t) con media costante Ex(t) = η. Si consideri la media temporaleottenuta come:
ηT =1
2T
∫ T
−Tx(t)dt. (2.42)
Il processo e detto ergodico in media con probabilita 1 se ηT → η quando T → ∞.Chiaramente ηT e una v.a. con media:
EηT =1
2T
∫ T
−TEx(t)dt = η.
e di conseguenza indicando con σ2T la varianza della v.a. ηT se ne conclude che la condizione
di processo ergodico in media e vera se e solo se σ2T → 0 quando T → ∞. Cio significa che
la distribuzione di probabilita della v.a. ηT tende a conentrarsi attorno al valore di η con ilcrescere di T .Quindi un processo e ergodico in media quando e verificata la condizione di cui prima. Perun processo stazionario in senso lato si puo dimostrare che esso e ergodico in media se la suafunzione di autocovarianza C(τ) = R(τ)− η2 soddisfa la condizione:
1
2T
∫ 2T
−2TC(τ)
(1− |τ |
2T
)dτ−−→
T→∞0. (2.43)
Una condizione sufficiente per stabilire se un processo stazionario in senso lato e anche ergodicoe la seguente: ∫ ∞
−∞|C(τ)|dτ <∞. (2.44)
2.8.3 Processo ergodico in correlazione
Qualora si desideri calcolare sperimentalmente la funzione di autocorrelazione di un processostazionario in senso lato x(t) a partire da una sola realizzazione x(t, ζ) del processo, si formadapprima il nuovo processo aleatorio zλ(t) = x(t + τ)x∗(t) e, per definizione, la media delprocesso zτ (t) coincide con Rx(τ). Premesso cio si puo affermare che il processo x(t) e ergo-dico in correlazione se il corrispondente processo zτ (t) e ergodico in media (vedi prima). Diconseguenza si puo scrivere che:
Rx(τ) = limT→∞
1
T
∫ T/2
−T/2x(t + τ)x∗(t)dt→ Rx(τ). (2.45)
in cui con Rx(τ) si e indicata la funzione di autocorrelazione del processo ottenuta con la mediatemporale.
3Praticamente la statistica del processo viene ottenuta a partire dal segnale misurato.
34

Le considerazioni di cui ai punti precedenti si estendono al calcolo della funzione di cross-correlazione e/o della cross-covarianza di due processi stazionari in senso lato. In particolare iprocessi x(t) e y(t) sono congiuntamente ergodici in correlazione se:
Rxy(τ) = limT→∞
1
T
∫ T/2
−T/2x(t + τ)y∗(t)dt→ Rxy(τ) (2.46)
35
Capitolo 3
Teoria spettrale dei processi stocastici
3.1 Processi stazionari almeno in senso lato
Si definisce spettro di potenza o densita di potenza spettrale di un processo stazionario(almeno in senso lato) x(t) la trasformata di Fourier della sua funzione di autocorrelazioneossia:
Wx(f) =∫ ∞
−∞Rx(τ)e−j2πfτdτ. (3.1)
Una volta noto lo spettro di potenzaWx(f) e possibile calcolare la funzione di autocorrelazionedel processo Rx(τ) attraverso la ben nota formula di inversione:
Rx(τ) =∫ ∞
−∞Wx(f)ej2πfτdf. (3.2)
Siccome la funzione di correlazione di un processo x(t) gode della proprieta di simmetria her-mitiana ossia Rx(τ) = R∗
x(−τ) lo spettro di potenza del processo e sempre una funzione realedella frequenza. In aggiunta, se il processo x(t) e reale allora lo spettroW(f) e reale ed e anchepari.Si osservi infine che la potenza del processo Rx(0) e calcolabile mediante la relazione:
Rx(0) =∫ ∞
−∞Wx(f)df. (3.3)
Dati due processi x(t) e y(t) congiuntamente stazionari si definisce il cross-spettro come latrasformata di Fourier della funzione di cross-correlazione ossia:
Wxy(f) =∫ ∞
−∞Rxy(τ)e−j2πfτdτ. (3.4)
Una volta noto il cross-spettro di potenza si ricava la funzione di cross-correlazione come:
Rxy(τ) =∫ ∞
−∞Wxy(f)ej2πfτdf. (3.5)
In generale, la funzioneWxy(f) e complessa anche quando x(t) e y(t) sono reali. Inoltre siccomevale la relazione, Rxy(τ) = R∗
yx(−τ) allora si deve avere che: Wxy(f) =W∗yx(f).
36

3.1.1 Teorema di Wiener-Khinchine
Si considera una generica realizzazione del processo x(t) e si calcoli la sua trasformata di Fouriertroncata nell’intervallo (−T/2, T/2) ossia:
XT (f) =∫ T/2
−T/2x(t)e−j2πftdt. (3.6)
Ovviamente XT (f), detto densita spettrale del processo associata alla singola realizzazione, eun altro processo aleatorio nella variabile f e quando f viene fissato XT (f) e una variabilealeatoria. Premesso cio vale il teorema di Wiener-Khinchine il quale asserisce che:
Wx(f) = limT→∞
1
TE|XT (f)|2. (3.7)
Questo teorema dice che la densita spettrale di potenza del processo viene ottenuta comemedia su tutte le possibili densita spettrali associate alle realizzazioni del processo. Inoltre valela seguente relazione:
Wx(f) = FRx(τ), (3.8)
in cui F indica l’operazione di trasformata di Fourier.
3.1.2 Annotazione sui processi ciclostazionari
Per un processo ciclostazionario x(t) lo spettro di potenza Sx(f) viene definito come la trasfor-mata di Fourier della funzione di autocorrelazione del processo di ordine 0 ossia:
Sx(f) = S(0)x (f) = FR(0)
x (τ) =∫ ∞
−∞R(0)
x (τ)e−j2πfτdτ. (3.9)
3.2 Analisi spettrale per processi tempo discreti
In questo sottoparagrafo le definizioni di spettro di potenza vengono estese al caso dei processitempo discreti. Si supponga che x(n) sia un processo stazionario tempo discreto con sequenzadi autocorrelazione Rx(m). Si definisce spettro di potenza del processo la trasformata di Fourierdiscreta della sequenza di autocorrelazione ossia:
W (ω) =∞∑
m=−∞Rx(m)e−jωmT . (3.10)
Dalla (3.10) si osserva che W (ω) e una funzione periodica in ω di periodo 2Ω = 2π/T .Sempre dalla relazione (3.10) si ottiene:
Rx(m) =1
2Ω
∫ Ω
−ΩW (ω)ejωmT dω Ω = π/T. (3.11)
In particolare si ricava che la potenza del processo tempo discreto ha l’espressione:
Rx(0) =1
2Ω
∫ Ω
−ΩW (ω)dω Ω = π/T. (3.12)
37

A volte viene anche introdotta la trasformata z della funzione di autocorrelazione del processotempo discreto e si ha:
Sx(z) =∞∑
m=−∞Rx(m)z−m. (3.13)
Vale ovviamente la relazione Sx(z)|z=ejωT = W (omega).Il significato della costante T viene chiarito assumendo che il processo tempo discreto x(n) siaottenuto mediante campionamento di un processo tempo continuo ossia x(n) = x(t)|t=nT . Inquesto caso, rammentando quanto detto in precedenza, si ha: Rx(m) = Rx(τ)|τ=mT . Usandola formula di Poisson si ottiene la formula di corrispondenza tra lo spettro del processo tempocontinuo con quello del corrispondente spettro tempo discreto:
W (ω) =1
T
∞∑n=−∞
W(ω + 2nΩ), Ω = π/T. (3.14)
Quindi lo spettro del processo tempo discreto e somma di repliche spostate in frequenza dellospettro del processo tempo continuo. Affinche lo spettro del processo tempo discreto possarappresentare lo spettro di quello continuo e necessario scegliere T in modo che siano rispettatele condizioni imposte dal teorema del campionamento.
38
Capitolo 4
Trasformazioni di processi stocastici
4.1 Generalita sulle trasformazioni di processi stocastici
Si consideri un processo stocastico x(t) e si supponga di poter assegnare ad ogni realizzazionedel processo x(t, ζi) una funzione y(t, ζi). Si e quindi creato un nuovo processo stocasticoindicato con:
y(t) = T [x(t)], (4.1)
in cui T [·] indica la trasformazione. Per definizione le realizzazioni di questo nuovo processoy(t) sono proprio le funzioni y(t, ζi).Il processo y(t) puo anche essere considerato come uscita di un sistema che esegue la trasforma-zione quando in ingresso viene posto il processo x(t). Tale sistema e completamente specificatoin termini dell’operatore T .Vale la seguente classificazione:
• Il sistema e deterministico se opera soltanto sulla variabile tempo t trattando ζ comeparametro. Cio significa che se due realizzazioni x(t, ζ1) e x(t, ζ2) sono identiche lungo tallora anche le corrispondenti realizzazioni del processo in uscita, indicate rispettivamentecon y(t, ζ1) e y(t, ζ2), saranno identiche lungo l’asse dei tempi t.
• Il sistema e detto stocastico se T opera su entrambe le variabili t e ζ. Cio significa cheesistono almeno due risultati dell’esperimento ζ1 e ζ2 tali che x(t, ζ1) = x(t, ζ2) per ognit ma che danno luogo a y(t, ζ1) 6= y(t, ζ2) lungo l’asse dei tempi t.
La classificazione di cui sopra si basa su un’analisi ingresso-uscita del sistema. E’ ovvio che seil sistema viene specificato in termini di componenti con precise caratteristiche fisiche e/o conuna o piu equazioni differenziali, e possibile asserire che il sistema e deterministico (stocastico)se gli elementi o i coefficienti delle equazioni differenziali, sono deterministici (stocastici).I sistemi utilizzati nella pratica per elaborare i processi, sono di tipo deterministico. Di con-seguenza nel seguito si considereranno soltanto sistemi deterministici. Di conseguenza ci siaspetta e che le statistiche del processo in uscita da una trasformazione deterministica possanoessere espresse in funzione delle statistiche del processo di ingresso. Nel seguito, verranno con-siderati soltanto due tipi di sistemi: i sistemi deterministici senza memoria e i sistemi linearitempo invarianti.
39

4.2 Sistemi senza memoria tempo invarianti
Un sistema e detto senza memoria se la relazione tra il processo aleatorio di ingresso e quellodi uscita e del tipo:
y(t) = g[x(t)], (4.2)
in cui g(x) e una funzione del valore istantaneo di x(t). Il sistema e senza memoria poiche adogni istante t il valore del processo di uscita dipende soltanto dal valore di quello d’ingressoallo stesso istante t.Una volta noto g(x) e possibile legare la densita di probabilita del primo ordine del processo diuscita fy(y; t) a quella del processo di ingresso fx(x; t) mediante le ben note formule gia vistein precedenza. In particolare si pupuo osservare che:
Ey(t) =∫ ∞
−∞g(x)fx(x; t)dx, (4.3)
e cheEy(t1)y(t2) =
∫ ∞
−∞g(x1)g(x2)fx(x1, x2; t1, t2)dx1dx2. (4.4)
La funzione di densita di probabilita congiunta di ordine n, fy(y1, ..., yn; t1, ..., tn) puo esseredeterminata in funzione della densita fx(x1, ..., xn; t1, ..., tn) utlizzando i ben noti risultati dellateoria dei vettori di variabili aleatorie. In questo caso la trasformazione di v.a. e (ovviamente)la seguente: y(t1) = g(x(t1)), ...,y(tn) = g(x(tn)).Per quanto riguarda le proprieta di stazionarieta del processo in uscita si puo dimostrare laseguente proprieta: se il processo in ingresso al sistema e stazionario in senso stretto alloraanche il processo di uscita e stazionario in senso stretto.Esempio: Un esempio significativo di sistema non lineare tempo invariante e il sistema nonlineare quadratore per il quale la relazione tra il processo di ingresso e quello di uscita e:
y(t) = x2(t). (4.5)
E’ abbastanza semplice determinare le statistiche del primo e del secondo ordine del processodi uscita y(t) una volte note quelle del processo di ingresso.In particolare si ha:
• fy(y; t) = 12√
y[fx(√
y; t) + fx(−√
y; t)];
• Per la densita di probabilita del secondo ordine si osserva che il sistema di equazioniy1 = x2
1, y2 = x22 ha le quattro soluzioni (±√y1,±
√y2) e il Jacobiano della trasofrmazione
vale ±4√
y1y2. Di conseguenza si ha:
fy(y1, y2; t1, t2) =1
4√
y1y2
∑fx(±
√y1,±
√y2; t1, t2),
che e una somma di quattro termini. Si osservi che se x(t) e stazionario in senso strettoallora si osserva che fy(y) e indipendente da t e quindi fy(y1, y2; τ) e τ = t1 − t2.
40
4.3 Sistemi lineari - tempo varianti e tempo invarianti
Un altro tipo di sistema di notevole interesse e quello che esegue una trasformazione di tipolineare su un processo di ingresso x(t). In questo caso il processo di uscita dal sistema lineareviene ottenuto attraverso la trasformazione:
y(t) =∫ ∞
−∞h(t, u)x(u)du, (4.6)
in cui h(t, u) e detto nucleo della trasformazione lineare il quale dipende dall’istante diosservazione t.Il sistema lineare e detto tempo invariante se h(t, u) = h(t − u). In questo caso il segnale diuscita y(t) dal sistema lineare ha l’espressione:
y(t) =∫ ∞
−∞h(t− u)x(u)du =
∫ ∞
−∞h(τ)x(t− τ)dτ. (4.7)
in cui con h(t) si indica la risposta impulsiva del sistema lineare. La (4.7) e anche nota comeintegrale di convoluzione e, in modo sintetico, il segnale in uscita y(t) viene solitamente indicatocon: y(t) = x(t)⊗ h(t).
4.4 Trasformazione di un processo in un sistema lineare
Come nel caso dei sistemi senza memoria, si e interessati a valutare soltanto le statistiche deiprimi due ordini del processo in uscita dal sistema lineare in funzione di quelle del processo diingresso.
4.4.1 Trasformazione processo stazionario in un sistema lineare tem-po invariante
Si supponga che il processo di ingresso x(t) sia puramente stazionario e venga fatto transitareall’interno di un sistema lineare tempo invariante con risposta impulsiva h(t). Si dimostra chela funzione di correlazione del processo di uscita y(t) ha l’espressione:
Ry(τ) = Rx(τ)⊗ rh(−τ), (4.8)
in cuirh(τ) =
∫ ∞
−∞h(t + τ/2)h(t− τ/2)dt. (4.9)
Ricordando il teorema di Wiener-Kintchine lo spettro del processo di uscita puo essere espressoin funzione del processo del processo in uscita calcolando la trasformata di Fourier della (4.8)e si ha la ben nota e importante relazione:
Wy(f) = |H(f)|2Wx(f). (4.10)
in cui H(f) e la trasformata di Fourier della risposta impulsiva. Se il processo di ingresso hamedia ηx non nulla, si dimostra che la media del processo in uscita ηy ha l’espressione:
ηy = H(0)ηx, (4.11)
in cui H(0) =∫∞−∞ h(τ)dτ .
41
Capitolo 5
Esempi di processi stocastici:Il processo Gaussiano
5.1 Proprieta generali dei vettori di variabili aleatorie
Gaussiane
Due v.a. x e y sono dette congiuntamente normali se la loro funzione di densita congiunta eesprimibile come:
f(x, y) =1
2πσ1σ2
√1− ρ2
12
exp
− 1
2(1− ρ212)
[(x− η1)
2
σ21
− 2ρ12(x− η1)(y − η2)
σ1σ2
+(y − η2)
2
σ22
],
(5.1)in cui ηi, σi con i = 1, 2 sono rispettivamente le medie e le deviazioni standard delle due v.a. eρ12 e il relativo coefficiente di cross-correlazione.Si dimostra facilmente che le funzioni di densita marginali delle v.a. x e y sono ancora dellefunzioni Gaussiane:
fx(x) =1√
2πσ1
e− (x−η1)2
2σ21 , fy(y) =
1√2πσ2
e− (y−η2)2
2σ22 .
La definizione di variabili aleatorie congiuntamente Gaussiane si estende anche al caso deivettori aleatori.Ovviamente n variabili che formano un vettore aleatorio X = [x1, ...xn]T sono congiuntamentenormali se la loro densita congiunta f(X), puo essere scritta come exponenziale negativo diuna forma quadratica ossia:
f(X) =1
(2π)n/2√
∆exp
−1
2(X −Θ)TC−1(X −Θ)
, (5.2)
in cui C e la matrice di covarianza delle n v.a., ∆ = detC e Θ = [η1, ..., ηn]T e il vettore checontiene le medie delle singole v.a. Le funzioni di densita marginali delle singole v.a. sonosempre funzioni Gaussiane.Si osservi che se le v.a. sono incorrelate la matrice di covarianza C e una matrice diagonale e la(5.2) si fattorizza nel prodotto delle n densita marginali delle singole v.a.. Di conseguenza perun vettore Gaussiano, se le n v.a. sono incorrelate esse sono anche statisticamente indipendenti.Esiste anche una definizione alternativa ma di grande utilita pratica, di variabili congiuntamente
42

Gaussiane ed e la seguente. Le n v.a. sono congiuntamente Gaussiane se e solo se per ognivalore dei coefficienti a1, ..., an si ha che la v.a.:
y = a1x1 + ... + anxn = aTX, (5.3)
ha una densita di probalita Gaussiana. Nella 5.3 si e assunto a = [a1, ..., an]T .Si dimostra che se la proprieta di cui prima e verificata allora le v.a. xi sono congiuntamenteGaussiane. Senza perdita di generalita la dimostrazione viene fatta nel caso di variabili aleatoriexi a media nulla.
5.2 Caratteristiche dei processi aleatori Gaussiani
Le proprieta di un processo stocastico Gaussiano (o Normale) si ottengono a partire dalleproprieta dei vettori di v.a. Gaussiani. In questo caso le v.a. xi sono ottenute andando adosservare il processo agli istanti ti ossia si assume xi = x(ti). Considerando un insieme genericodi istanti temporali, t1, ..., tn, la funzione di densita congiunta di ordine n-esimo del processoha l’espressione:
f(X) =1
(2π)n/2√
∆exp
−1
2(X −Θ(t1, ..., tn))TC−1
x (t1, ..., tn)(X −Θ(t1, ..., tn))
, (5.4)
in cui si e esplicitata la dipendenza dagli istanti di osservazione del processo. Il vettore dellemedie Θ = [ηx(t1), ..., ηx(tn)]T in cui ηx(t) e la funzione di media del processo.La matrice di covarianza Cx(t1, ..., tn) contiene elementi del tipo Cx,ij = cov(xi,xj) = cov(x(ti),x(tj)) =Cx,ij(ti, tj) e i, j = 1, ..., n in cui si e esplicitata la dipendenza dagli istanti di osservazione delprocesso ti.Le caratteristiche del processo Gaussiano sono completamente caratterizzate dalla funzione dimedia e dalle proprieta della corrispondente matrice di covarianza C che e un momento delsecondo ordine.In particolare valgono le seguenti ovvie proprieta:
• La conoscenza delle funzioni di media η(t) per ogni istante t e della corrispondente funzio-ne di covarianza Cx(ti, tj) per ogni coppia di istanti temporali (ti, tj) consente di valutare lafunzione di densita congiunta del processo stocastico per qualunque ordine n. Il processoGaussiano e univocamente caratterizzato da queste due funzioni. Se la funzione di mediae nulla allora il processo Gaussiano e completamente caratterizzato dalla conoscenza dellamatrice di covarianza ossia dalla matrice di correlazione.
• Se il processo Gaussiano e ciclostazionario almeno in senso lato (le funzioni di media e dicovarianza sono funzioni periodiche) esso e anche ciclostazionario in senso stretto.
• Se il processo Gaussiano e stazionario in senso lato esso e anche stazionario in sensostretto.
• La definizione di processi congiuntamente Gaussiani e immediata. Due processi sono con-giuntamente Gaussiani se la loro densita di probabilita di ordine n, fxy(x1, ..., xn, y1, ..., yn)e di tipo Gaussiano. In questo caso per scrivere la funzione di densita e anche necessariala conoscenza della funzione di cross-covarianza dei due processi.
43

Se la funzione di covarianza del processo Gaussiano e del tipo Cx(ti, tj) = σ(ti)2δ(ti − tj) si
parla di processo Gaussiano bianco (o anche di rumore bianco) in generale non stazionario.Di solito si assume che un processo bianco abbia una funzione di media nulla.Se Cx(ti, tj) = N0δ(ti − tj) il processo e detto processo Gaussiano bianco stazionario e N0 e ladensita spettrale del processo di rumore.
5.2.1 Trasformazione lineare di processi Gaussiani
Si consideri un processo normale x(t) in ingresso ad un sistema che opera una trasformazionelineare. Si dimostra che il processo in uscita y(t) e ancora Gaussiano. Inoltre se due processiin ingresso x1(t) e x2(t) a due sistemi lineari sono congiuntamente Gaussiani, allora le uscitecorrispondenti, y1(t) e y2(t) sono anche loro congiuntamente gaussiani.La dimostrazione di questi due fatti si basa sulla estensione al caso continuo della proprietaespressa nella (5.3) approssimando gli integrali con delle somme finite di v.a. Gaussiane e pas-sando poi al continuo. Si dimostra che, passando al continuo, la somma integrale tende ad unadistribuzione Gaussiana nel senso MS.Sfruttando questa proprieta nel caso di processi Gaussiani e possibile determinare immediata-mente la funzione di densita di qualunque ordine del processo di uscita. Infatti e sufficientecalcolare soltanto statistiche del primo e del secondo ordine (media e funzione di covarianza)del processo di uscita in funzione di quelle del processo di ingresso. Alcune delle formule ne-cessarie per tali calcoli sono gia state illustrate nei paragrafi precedenti nei casi di processiciclostazionari e stazionari.
5.2.2 NOTA: generalita sul processo bianco stazionario
Nel caso generale di un processo bianco stazionario (non necessariamente Gaussiano) a medianulla lo spettro del processo si ottiene calcolando la trasformata di Fourier della funzione diautocorrelazione del processo ottenendo:
Sx(f) = FRx(τ) = FN0δ(τ) = N0 ∀f. (5.5)
e quindi N0 che si misura in Watt/Hz rappresenta la densita di potenza del processo. Si osserviche la potenza di un processo stazionario bianco ha un valore infinito. Infatti per definizione siha:
P =∫ ∞
−∞Sx(f)df =
∫ ∞
−∞N0df, (5.6)
che da per l’appunto un valore non limitato.
44

Capitolo 6
Esempi di processi stocastici: SegnaliModulati
6.1 Modello di segnale armonico modulato
Si considerino due processi stazionari in senso lato a(t) e b(t) a media nulla. Si formi il processo:
x(t) = a(t) cos(ω0t)− b(t) sin(ω0t) = r(t) cos[ω0t + φ(t)], (6.1)
in cui ω0 e una costante e
• r(t) =√
a(t)2 + b(t)2;
• tan φ(t) = b(t)/a(t).
Il processo in (6.1) e ottenuto modulando in fase e in ampiezza un segnale portante cosinusoidale.Si dimostra che il processo x(t) e stazionario in senso lato se i processi a(t) e b(t) godono delleproprieta:
Ra(τ) = Rb(τ) , Rab(τ) = −Rba(τ). (6.2)
La dimostrazione viene riportata di seguito.Siccome i processi sono a media nulla si ha:
Ex(t) = Ea(t) cos ω0t− Eb(t) sin ω0t = 0. (6.3)
Per il calcolo della funzione di autocorrelazione del processo x(t) si ha:
x(t + τ)x(t) = [a(t + τ) cos(ω0t + τ)− b(t + τ) sin(ω0t + τ)]. (6.4)
Utilizzando ben note relazioni trigonometriche e calcolando la media si ottiene:
2Ex(t + τ)x(t) = [Ra(τ) + Rb(τ)] cos(ω0τ) + [Rab(τ)−Rba(τ)] sin(ω0τ)+
+ [Ra(τ)−Rb(τ)] cos(ω0(2t + τ))− [Rab(τ) + Rba(τ)] sin(ω0(2t + τ)). (6.5)
Dovendo richiedere che il processo x(t) sia stazionario in senso lato, la funzione di autocorrela-zione non deve dipendere da t e di conseguenza devono valere le relazioni in (6.2) c.d.d.Di solito si considera anche il processo duale di x(t) indicato con y(t) e definito come:
y(t) = b(t) cos(ω0t) + a(t) sin(ω0t). (6.6)
45

Si dimostra che il processo y(t) e ancora stazionario in senso lato se valgono le condizioni dicui alla (6.2). Inoltre si dimostra facilmente, applicando le definizioni, che valgono le seguentirelazioni:
Ry(τ) = Rx(τ) , Rxy(τ) = −Ryx(τ) (6.7)
in cuiRxy(τ) = Rab(τ) cos(ω0τ)−Ra(τ) sin(ω0τ). (6.8)
Dati i processi a(t) e b(t) e i corrispondenti x(t) e y(t) si introduce anche la seguente notazionecomplessa:
• w(t) = a(t) + jb(t) = r(t)ejφ(t);
• z(t) = x(t) + jy(t) = w(t)ejω0t.
I due processi complessi z(t) e w(t) sono quindi legati da una semplice operazione di moltipli-cazione per un segnale complesso ejω0t (un tono) con pulsazione ω0. Di conseguenza, diventafacile mettere in relazione le funzioni di autocorrelazione e gli spettri dei due processi complessi.Prima di analizzare queste relazioni occorre derivare altre proprieta. Partendo dalla notazionecomplessa si dimostra che:
• x(t) = <z(t);
• a(t) + jb(t) = w(t) = z(t)ejω0t;
• a(t) = x(t) cos(ω0t) + y(t) sin(ω0t);
• b(t) = y(t) cos(ω0t)− x(t) sin(ω0t).
Una volta definiti i processi complessi occorre valutare la loro funzione di autocorrelazione. Siricava facilmente che:
• Rw(τ) = 2Ra(τ)− 2jRab(τ);
• Rz(τ) = 2Rx(τ)− 2jRxy(τ);
• infine si osserva che vale la seguente relazione: Rz(τ) = ejω0τRw(τ).
6.1.1 Calcolo dello spettro di potenza del processo
Indicando con Sa(f) e con Sb(f) gli spettri dei processi a(t) e b(t) si ricava facilmente:
• Sw(f) = 2Sa(f)− 2jSab(f);
• Sz(f) = 2Sx(f)− 2jSxy(f);
• Sz(f) = Sw(f − f0) avendo assunto ω0 = 2πf0.
Le funzioni Sx(f) e Sz(f) sono reali e positive. Infatti si rammenta che valgono le seguentiproprieta: Rxy(−τ) = −Ryx(−τ) = −Rxy(τ). Cio porta alla conclusione che −jSxy(f) =Bxy(f) e reale. Inoltre si ha: |Bxy(f) ≤ Sx(f) e Bxy(−f) = −Bxy(f).Infine, siccome Sx(−f) = Sx(f) si ricava facilmente:
4Sx(f) = Sz(f) + Sz(−f) , 4jSxy(f) = Sz(−f)− Sz(f). (6.9)
NOTA: quando Rab(τ) = 0 ossia i processi a(t) e b(t) sono incorrelati, si ricava facilmente che:
Sx(f) =1
2[Sa(f + f0) + Sa(f − f0)] . (6.10)
46

6.2 Modello di segnale numerico
Un modello di processo stocastico di estremo interesse per i sistemi di comunicazione numericie il seguente:
x(t) =∞∑
n=−∞ckp(t− kT ), (6.11)
in cui la sequenza ck rappresenta un processo stocastico tempo discreto. Le v.a. ck assu-mono valori all’interno di insieme finito di valori ad istanti multiplo intero di T ossia tk = kT .Infine p(t) e una forma d’onda con energia finita di solito di tipo impulsivo, che viene modulatain ampiezza dal processo tempo discreto ck. Il processo stocastico in (6.11) viene usato perrappresentare l’inviluppo complesso dei segnali digitali ottenuti mediante modulazione lineare,utilizzati nelle telecomunicazioni. L’informazione trasmessa e contenuta nei valori assunti dallev.a. ck.Per caratterizzare il processo in (6.11) occorre determinare la sua media e la sua funzione di au-tocorrelazione. La derivazione di questi due momenti puo essere ottenuta con due procedimentidistinti. Nel seguito si illustrera la derivazione che utilizza le proprieta dei processi stocastici.
6.2.1 Calcolo dello spettro di potenza del processo
Si supponga che il processo ck sia stazionario almeno in senso lato con funzione di media Eck =ηc e funzione di autocorrelazione Rc(k) = Ecncn+k. La forma d’onda p(t) e deterministica.Il calcolo della funzione di media del processo e immediato e si ha:
ηx(t) = Ex(t) =∞∑
n=−∞Eckp(t− nT ) = ηc
∞∑n=−∞
p(t− nT ). (6.12)
Si osservi che la funzione di media del processo e tempo variante ed in particolare, e unafunzione periodica con periodo T .Per quanto riguarda la funzione di autocorrelazione si ha:
Rx(t + τ, t) = Ex(t + τ)x(t) =∞∑
n=−∞
∞∑m=−∞
Ecncmp(t− nT )p(t + τ −mT ). (6.13)
Sostituendo Rc(k) = Ecncn+k la (6.13) puo anche essere riscritta come:
Rx(t + τ, t) =∞∑
n=−∞
∞∑m=−∞
Rc(n−m)p(t− nT )p(t + τ −mT ). (6.14)
Si osserva che anche la funzione di autocorrelazione del processo e una funzione periodica diperiodo T ossia Rx(t + τ + T, t + T ) = Rx(t + τ, t), e di conseguenza si puo concludere che ilprocesso in esame e ciclostazionario almeno in senso lato.La caratterizzazione completa del processo richiede il calcolo dei coefficienti dello sviluppo inserie di Fourier della funzione di autocorrelazione ed in particolare del coefficiente di ordinezero R(0)
x (τ). La trasformata di Fourier di R(0)x (τ) e lo spettro di potenza del processo, S(0)
x (f).Per definizione si ha:
R(0)x (τ) =
1
T
∫ T/2
−T/2Rx(t + τ, t)dt. (6.15)
47

Effettuando la sostituzione di variabili m← n−m, la (6.15) puo essere riscritta come:
R(0)x (τ) =
∞∑m=−∞
Rc(m)∞∑
n=−∞
1
T
∫ T/2
−T/2p(t− nT )p(t + τ − nT −mT )dt. (6.16)
La (6.16) puo essere riscritta come:
R(0)x (τ) =
∞∑m=−∞
Rc(m)∞∑
n=−∞
1
T
∫ T/2−nT
−T/2−nTp(t− nT )p(t + τ −mT )dt. (6.17)
Definendo rp(τ) =∫∞−∞ p(t + τ)p(t)dt la funzione di autocorrelazione della forma d’onda p(t),
sostituendo si ottiene:
R(0)x (τ) =
∞∑m=−∞
Rc(m)rp(τ −mT ). (6.18)
Lo spettro di potenza del processo si ottiene trasformando secondo Fourier la (6.18) e si ha:
S(0)x (f) =
1
T|P (f)|2Sc(f), (6.19)
in cui Sc(f) e la densita spettrale di potenza del processo tempo discreto che e definita come:
Sc(f) =∞∑
m=−∞Rc(m)e−j2πfmT . (6.20)
In base alla forma della funzione di autocorrelazione del processo si distinguono vari casi.Le variabili aleatorie del processo tempo discreto sono indipendenti e incorrelate. In questocaso si ha:
Rc(m) =
[σ2
c + η2c per m = 0
η2c per m 6= 0
. (6.21)
Di conseguenza lo spettro del processo tempo discreto assume la forma:
Sc(f) = σ2c + η2
c
∞∑m=−∞
e−j2πfmT . (6.22)
La∑∞
m=−∞ e−j2πfmT e equivalente ad un treno infinito di impulsi e di conseguenza la (6.22) puoanche essere riscritta come:
Sc(f) = σ2 + η2c
1
T
∞∑m=−∞
δ(f − m
T
). (6.23)
Sostituendo la (6.23) nella (6.19) si ha:
S(0)x (f) =
σ2c
T|P (f)|2 +
η2c
T 2
∞∑m=−∞
∣∣∣∣P (m
T
)∣∣∣∣2 δ(f − m
T
). (6.24)
Nella espressione in (6.24) sonos tati messi in evidenza due addendi. Il primo addendo rap-presenta uno spettro continuo e la sua forma dipende dallo spettro della forma d’onda p(t).Il secondo termine consiste di linee spettrali equispaziate di 1/T e la potenza di ogni linea e
proporzionale a∣∣∣P (
mT
)∣∣∣2. Si osservi che la presenza delle righe spettrali scompare se la mediadel processo tempo discreto ηc e nulla. Quest’ultima condizione viene di solito verificata nelcaso dei segnali digitali modulati linearmente considerati in pratica.
48