approximate formulas for rotational effects in earthquake engineering€¦ · ·...
TRANSCRIPT

ORIGINAL ARTICLE
Approximate formulas for rotational effectsin earthquake engineering
Mohammad Reza Falamarz-Sheikhabadi & Mohsen Ghafory-Ashtiany
Received: 18 December 2010 /Accepted: 3 January 2012 /Published online: 19 January 2012# Springer Science+Business Media B.V. 2012
Abstract The paper addresses the issue of research-ing into the engineering characteristics of rotationalstrong ground motion components and rotationaleffects in structural response. In this regard, at first,the acceleration response spectra of rotationalcomponents are estimated in terms of translationalones. Next, new methods in order to consider theeffects of rotational components in seismic designcodes are presented by determining the effectivestructural parameters in the rotational loading ofstructures due only to the earthquake rotationalcomponents. Numerical results show that accord-ing to the frequency content of rotational compo-nents, the contribution of the rocking componentsto the seismic excitation of short period structurescan never be ignored. During strong earthquakes,these rotational motions may lead to the unexpect-ed overturning or local structural damages for thelow-rise multi-story buildings located on soft soil.The arrangement of lateral-load resisting system inthe plan, period, and aspect ratio of the systemcan severely change the seismic loading of wide
symmetric buildings under the earthquake torsionalcomponent.
Keywords Earthquake rotational components .
Apparent velocity . Principal axes . Accelerationresponse spectrum . Base shear . Accidental eccentricity
1 Introduction
The study on the seismic behavior of the engineeringstructures during the past strong ground motion (SGM)has shown that parts of earthquake damages or evencollapse of structures cannot only be attributed to thetranslational components of SGMs. Indeed, some unex-pected failures of structures such as tall asymmetricbuildings or irregular frames (Ghafory-Ashtiany andSingh 1984), bridges (Kalkan and Grazer 2007), slendertower-shaped structures (Zembaty and Boffi 1994), nu-clear reactors (Rutenberg and Heidebrecht 1985), verti-cally irregular buildings (Ghafory-Ashtiany andFalamarz-Sheikhabadi 2010), and even ordinary multi-story buildings near earthquake faults (Trifunac 2009),can be associated with the seismic loading due to spatialvariation of seismic waves. The spatial derivatives oftranslational SGMs are named rotational components ofthe SGM and their influences on the seismic behavior ofstructures have been the subject of many theoreticalresearches during the past 40 years (Newmark 1969;
J Seismol (2012) 16:815–827DOI 10.1007/s10950-012-9273-z
M. R. Falamarz-Sheikhabadi (*) :M. Ghafory-AshtianyInternational Institute of Earthquake Engineering andSeismology,Tehran, Irane-mail: [email protected]

Trifunac 1982; Ghafory-Ashtiany and Singh 1986; Twisset al. 1993; De La Llera and Chopra 1994; Hao 1996;Shakib and Tohidi 2002; Li et al. 2004; Ghayamghamianand Nouri 2007; Pujol 2009; Lee and Trifunac 2009).However, due to the lack of the recorded data on therotational components, the earthquake-resistant design ofstructures are mainly performed by considering the influ-ences of the translational components and the seismicloading due to the rotational components are ignored orunderestimated by most seismic codes.
So far, the effects of the rocking components on theseismic loading of structures are only regarded byEurocode 8, part 6 (EC8.6, 2005) which recommendsthat the rocking seismic excitations should be consid-ered for the tall structures (higher than 80 m) designedin regions of high seismicity. The response spectrumfor the rocking component is defined as (Eurocode 8 etal. 2005):
SAθyðTÞ ¼ 1:7pSAuðTÞVST
ð1:aÞ
where SAu(T) is the elastic horizontal response spec-trum defined for the site classes, based on the averageshear wave (S-wave) velocity over the uppermost30 m of the ground profile, Vs, and T is the naturalperiod of structure. Formula 1.a represents only rock-ing excitations and does not take into account soil-structure interaction effects, which may excite struc-tural rocking even only from the horizontal SGM. Thiscode also presents a formula similar to Eq. 1.a toconsider the effects of the torsional component:
SAθzðTÞ ¼ pSAuðTÞVST
ð1:bÞ
However, in most of the seismic codes, the effectsof torsion are usually considered in the case of thestructural irregularities. This can be done by applyingthe equivalent lateral forces at a distance ed (designeccentricity) from the center of rigidity (CR). Somecodes also specify the design eccentricity with respectto the shear center. The code provision for the designeccentricity at the fth floor, edf, can be expressed in ageneral form as:
edf ¼ aef þ bbf ð2:aÞ
edf ¼ def þ bbf ð2:bÞ
where ef is the static eccentricity at the fth floordefined between the floor center of mass (CM)and the CR, bf is the plan dimension of the fthfloor normal to the considered direction of groundmotion, and coefficients α, β, and δ are the code-specified constants. The second term in Eqs. 2.aand 2.b is introduced in codes to account fordifferences between the analytical and actual loca-tion of centers of mass, shear, and resistance instructures during an SGM. This accidental eccen-tricity is assumed to be a fraction of the plandimension, βbf, where the coefficient β based onthe finding of the elastic analysis of rigidity sup-ported structures and on engineering judgment isproposed to be in the range of 0.05–0.1 in most ofthe seismic design codes.
Past studies have shown that Eqs. 1.a and 1.b forthe rotational excitations require further research andempirical scaling (Ghayamghamian et al. 2009). Thesame is true when it comes to the formulas for struc-tural eccentricities (Zembaty 2009).
In this study, methods for inclusion of the load-ing effects of earthquake rotational components inbuilding codes are proposed. To achieve this, atfirst, the characteristics of rotational componentsand their relations with corresponding translationalcomponents are reviewed. Next, the effective struc-tural parameters and their influences on the rota-tional excitation of structures subjected to theearthquake rotational components are determined.Besides, the random responses of the structuresunder the combined action of the translational androtational components are analyzed. Finally, basedon the obtained results of dynamic analyses, thesimple formulas for the estimation of the seismicloading of structures due to the earthquake rotation-al components are presented.
2 Characteristics of rotational components
The rotational components of ground motions, ~θg
n o,
induced by the spatial variation of seismic waves canbe obtained in terms of the translational components,
ugx ; ugy ; u
gz
� �, along Cartesian coordinates axes (x, y, z)
for small deformation as follows. Defining Cartesiancoordinate system on the ground surface (z ¼ 0),
816 J Seismol (2012) 16:815–827

displacement gradient, ∇U, which is a second tensororder, will become:
rU ¼
@ugx@x
12
@ugy@x þ @ugx
@y
� �0
12
@ugy@x þ @ugx
@y
� �@ugy@y 0
0 0 0
2666643777753�3
þ0 � 1
2@ugy@x � @ugx
@y
� �� @ugz
@x
12
@ugy@x � @ugx
@y
� �0 � @ugz
@y
@ugz@x
@ugz@y 0
26664377753�3
ð3Þ
where the symmetric matrix corresponds with thestrain tensor in small deformation and the anti-symmetric matrix is the rotation tensor. From this
equation, the rotational components vector, ~θ, can beexpressed as:
~θ ¼ @uz@y
~i� @uz@x
~jþ 1
2
@uy@x
� @ux@y
� �~k ð4Þ
The first two terms in right side of Eq. 4 are knownas the rocking components related to the verticalground motion, and third term entitled the torsionalcomponent is related to the horizontal motions. Trans-forming Eq. 4 into the frequency domain, the rotation-al displacements corresponding to the linear SGMscan be obtained as:
~θgwð Þ
n o¼ 2pi
ugz wð Þiy wð Þ
~i� 2piugz wð Þix wð Þ
~j� piugy wð Þix wð Þ � ugx wð Þ
iy wð Þ� �
~k
ð5Þ
where ω is the circular frequency, ij is the wavelengthof seismic waves along jth-direction on horizontal
surface, and i ¼ ffiffiffiffiffiffiffi�1p
. By introducing the equivalentconstant apparent velocities for x- and y-directions, asthe velocity at which a plane wave appears to travelalong horizontal surface, the rotational accelerationcomponents of the linear earthquake ground motionscan be estimated as:
~::θgwð Þ
n o¼ iw
::uzg wð ÞVy
;�iw::ugz wð ÞVx
; iw2
::uxg wð ÞVy
�::uxg wð ÞVx
� �� �ð6Þ
where Vj is the constant apparent velocity alongjth-direction. This simple relation can be used asa first-order approximation in calculating the ac-celeration response spectra of rotational compo-nents of SGMs with an acceptable approximationexcept in the highly attenuated medium. For ahomogeneous isotropic and elastic semi-infinitemedium, the apparent velocity in Eq. 6 can beassumed as VS�S sinϕ= , which Vs-s is the propaga-tion velocity of the shear waves in the mediumand ϕ is the incident angle. Thus, in this case, thetheoretical value of the apparent velocity is in therange of the propagation velocity of the shearwaves in the medium and infinity. From engineer-ing aspect, considering the fact that the soil be-neath each structure is usually assumed to behorizontally layered, in most of the seismic codes,a constant velocity equal to the S-wave velocityover the uppermost 30 m of the ground profile isconsidered as the apparent velocity of seismicwaves. It should be kept in mind that such anassumption usually gives the most conservativeform of the rotational components unless somespecial situations which site effects cause seismicwaves propagate horizontally. Here, it should alsobe mentioned that based on the authors’ knowl-edge, there is not any exact theoretical method toestimate rotational components in near field andwe can only estimate rotational motions in the fardistances from fault zone, appropriately. In fact,for the estimation of the rotational components innear field, we have infinity solutions for solvingseismic wave propagation problem. Using shearwave velocity at surface layer instead of apparentvelocity in seismic codes is probably due to thisdifficulty in defining and estimating phase veloc-ity. Since authors have recently improved theconcept of bidirectional phase velocity in themiddle-field zone, to present engineering formulafor the rotational loading of structures, it has beenassumed VA0Vx0Vy. The reason of such a simpli-fication will be discussed in future in anotherauthors’ paper. However, it should be mentionedthat the assumption of bidirectional phase velocityis considered against the current classical assump-tion of radial wave propagation (point seismicsource case).
Noting that the torsional component about z-axis isindependent of x- and y-axes the approximate
J Seismol (2012) 16:815–827 817

relationship between the spectral density function(SDF) of rotational, Sgθ wð Þ, and translational acceler-ations can be obtained as:
Sgθ wð Þ ¼ w2 Suz wð ÞV 2A
;w2 Suz wð ÞV 2A
;w2
4V 2A
Sux wð Þ þ Suy wð Þ� �� �ð7Þ
where Sux(ω), Suy(ω), and Suz(ω) are, respectively, theSDF of the translational accelerations along principalaxes. Considering the fact that random vibration-basedresponse spectra of ground motions can be written as:
SD2 ¼ C2d
Z 1
�1S wð Þ H wð Þj j2dw ð8:aÞ
SV2 ¼ C2v
Z 1
�1w2S wð Þ H wð Þj j2dw ð8:bÞ
where H(ω) is the frequency response function, SDand SV are respectively displacement and velocityresponse spectrum, and also Cd and Cv are theircorresponding peak factors. Moreover, assumingthat the Sux(ω) and Suy(ω) are equal, the approxi-mate forms of the acceleration response spectra ofthe rotational components, SAθ, can be obtainedby substituting Eq. 7 into Eq. 8.a and consideringEq. 8.b as follows:
SAθx ¼ SAθy ¼ 2p � SAuz
Tθ � VA; SAθz ¼
ffiffiffi2
pp � SAux
Tθ � VAð9Þ
in which SAux and SAuz are the acceleration re-sponse spectra of the translational componentsalong x- and z-axes, and Tθ is fundamental periodof rotational single degree of freedom system.However, the acceleration response spectrum usu-ally decrease with increase of the period of systemvibration, but this reduction according to Eqs. 8.aand 8.b is more pronounced for rotational compo-nents than translational ones.
Figure 1 shows the normalized acceleration re-sponse spectra of translational and rotational compo-nents corresponding to a local earthquake recorded atHACC station of HGS-array with six components(Taiwan, 2007). Here, it should be noted that Fig. 1shows the mean spectra of horizontal and rockingcomponents of this event. As it can be seen, rotationalacceleration response spectra rapidly decrease with
increasing structural period; and the effects of rota-tional components are negligible in the long periods ofvibration. From here, it can be inferred that the rota-tional acceleration components can only be destructivein seismic loading of structures which are stiff (short-period) like nuclear reactors, or sensitive to the high-frequency motions such as irregular structures or sec-ondary systems. For instance, the high-frequency con-tent of rocking components may severely increase thecontribution of the specific higher modes of vibrationto structural responses of vertically irregular structuresand cause local structural and non-structural damagesduring SGMs.
Herein, the dynamic analysis of the seismicbehavior of the structures subjected to the rotation-al motions is performed using the random vibra-tion theory. Also, to model the SDF of the input
0 0.5 1 1.5 20
0.5
1
1.5
2
2.5
3
3.5
4
4.5
T(sec)
SA
Horizontal componentVertical component
0 0.5 1 1.5 20
0.5
1
1.5
2
2.5
3
3.5
4
4.5
T(sec)
SA
θ
Rocking componentTorsional component
Fig. 1 Acceleration response spectra of translational and rota-tional components for damping ratio of 0.05
818 J Seismol (2012) 16:815–827
translational acceleration, the filtered Kanai-Tajimispectrum (Ruiz and Penzien 1969), is used:
S wð ÞS0
¼ 1þ 4x2s w ws=ð Þ2
1� w ws=ð Þ2h i2
þ 4x2s w ws=ð Þ2
� w wg
� �41� w wg
� �2h i2þ 4x2g w wg
� �2� exp � w ws=ð Þ2
2 1þ xsð Þ2 !
ð10Þ
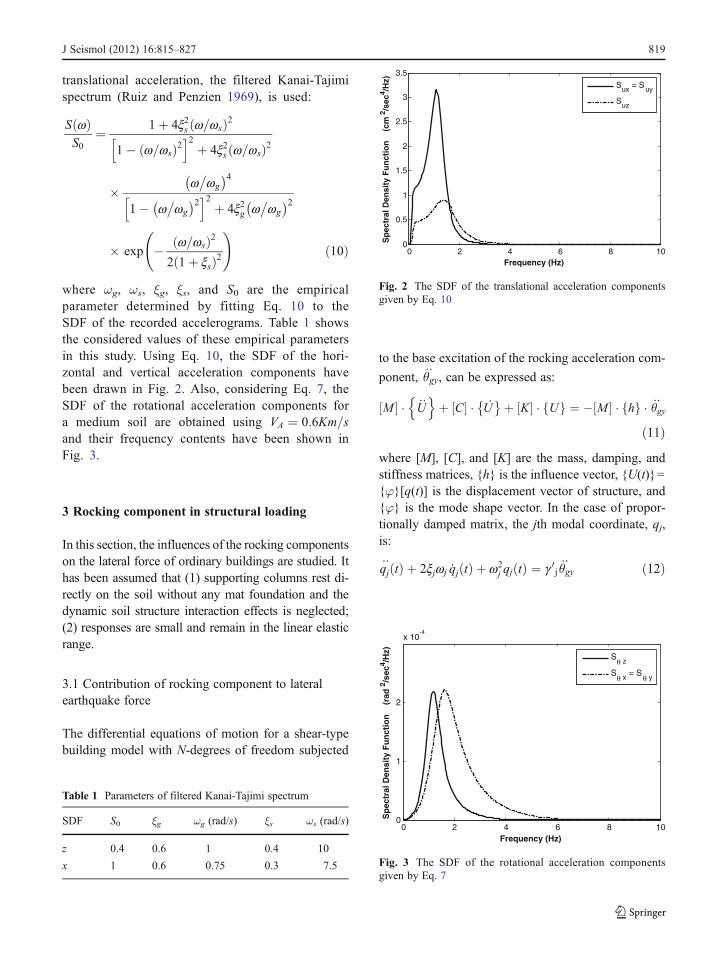
where ωg, ωs, ξg, ξs, and S0 are the empiricalparameter determined by fitting Eq. 10 to theSDF of the recorded accelerograms. Table 1 showsthe considered values of these empirical parametersin this study. Using Eq. 10, the SDF of the hori-zontal and vertical acceleration components havebeen drawn in Fig. 2. Also, considering Eq. 7, theSDF of the rotational acceleration components fora medium soil are obtained using VA ¼ 0:6Km s=and their frequency contents have been shown inFig. 3.
3 Rocking component in structural loading
In this section, the influences of the rocking componentson the lateral force of ordinary buildings are studied. Ithas been assumed that (1) supporting columns rest di-rectly on the soil without any mat foundation and thedynamic soil structure interaction effects is neglected;(2) responses are small and remain in the linear elasticrange.
3.1 Contribution of rocking component to lateralearthquake force
The differential equations of motion for a shear-typebuilding model with N-degrees of freedom subjected
to the base excitation of the rocking acceleration com-
ponent,::θgy, can be expressed as:
M½ � � ::Un o
þ C½ � � �U þ K½ � � Uf g ¼ � M½ � � hf g � ::θgy
ð11Þwhere [M], [C], and [K] are the mass, damping, andstiffness matrices, {h} is the influence vector, {U(t)}0{φ}[q(t)] is the displacement vector of structure, and{φ} is the mode shape vector. In the case of propor-tionally damped matrix, the jth modal coordinate, qj,is:::qjðtÞ þ 2xjwj
�qjðtÞ þ w2j qjðtÞ ¼ g 0j
::θgy ð12Þ
Table 1 Parameters of filtered Kanai-Tajimi spectrum
SDF S0 ξg ωg (rad/s) ξs ωs (rad/s)
z 0.4 0.6 1 0.4 10
x 1 0.6 0.75 0.3 7.5
0 2 4 6 8 100
1
2
x 10-4
Frequency (Hz)
Sp
ectr
al D
ensi
ty F
un
ctio
n
(ra
d2 /s
ec4 /H
z)
Sθ z
Sθ x = S
θ y
Fig. 3 The SDF of the rotational acceleration componentsgiven by Eq. 7
0 2 4 6 8 100
0.5
1
1.5
2
2.5
3
3.5
Frequency (Hz)
Sp
ectr
al D
ensi
ty F
un
ctio
n
(cm
2 /sec
4 /Hz)
Sux = Suy
Suz
Fig. 2 The SDF of the translational acceleration componentsgiven by Eq. 10
J Seismol (2012) 16:815–827 819

where ωj and ξj are the modal frequency and damping
ratio, g 0j ¼ � 1 Mmj
.� �PNi¼1
miϕijhi, hi and mi are the
height and mass of ith floor above the base, and Mmj is
the jth modal mass. For such a system, the jth modalresponse becomes:
qjðtÞ ¼ g jHj
Z t
0
::θgy tð Þhj t � tð Þdt ð13Þ
where
Hj ¼PNi¼1
miϕijhiPNi¼1
miϕij
; g j ¼�1
Mmj
XNi¼1
miϕij ð14Þ
and hj(t-τ) is the unit impulse response function of jth
mode. Also, the story shear can be obtained by:
fsðtÞf g ¼ K½ � UðtÞf g ¼XNj¼1
w2j M½ � fj
qjðtÞ ð15Þ
Using Eq. 15, the induced base shear due to theexcitation of the rocking component becomes:
VθyðtÞ ¼XNi¼1
fsi ¼XNj¼1
g jw2j M
mj qjðtÞ ð16Þ
In special case, when the first mode shape can beassumed linear fi1 ¼ hi H=ð Þ, using the orthogonalityproperty of modes and note to
Pi¼
1Nmifijhi ¼
H f1f gTM fj
, it can be shown that for all j≠1, the
effective modal heights, Hj, are zero. In this case,Eq. 16 becomes:
VθyðtÞ ¼ g21w21M
m1 H1
Z t
0
::θgy tð Þhj t � tð Þdt ð17Þ
From Eq. 17, the maximum base shear due to therocking component by using Eq. 9 can be writtenas:
Vθy�max ¼ 2pM 1H1
T1VASPAw w1; x1ð Þ ð18Þ
where SPA is the pseudo-acceleration response
spectrum and M 1 ¼ g21Mm1 is the effective mass
of the first mode of the structural vibration. Onthe other hand, the base shear due to the excitation
of the horizontal acceleration can similarly beexpressed as:
VuðtÞ ¼XNj¼1
g2j w2j M
mj
Z t
0
::ug tð Þhj t � tð Þdt ð19Þ
Similarly the maximum base shear due to the hor-izontal component can be written as:
Vu�max ¼ ηM 1SPAu w1; x1ð Þ ð20Þ
where η is a non-dimensional factor with value in therange between 1 and 1.5 for typical multi-story build-ings. Defining ρwu � SPAw SPAu= and assuming λ asthe cross-correlation coefficient of the rocking andhorizontal motions, the maximum base shear due tothe combined action of the horizontal and rockingcomponents can be written as:
Vuθy�max ¼ SPAu T1; x1ð Þg
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1þ θ1ð Þ2 þ 2 l� 1ð Þθ1
q�W ð21Þ
where g is the gravitational acceleration, W ¼ ηM1g isthe effective weight of the structure vibration, and θ1 ¼2pρwuH1ð Þ T1VAηð Þ= in whichH1 ¼
PNi¼1
mih2iPNi¼1
mihi
�.
TheH1 for a N-story building with regular configurationin elevation, can be obtained by 2N þ 1ð ÞH 3N= . Twoconservative assumptions are necessary to obtain a prac-tical formula for the base shear, V, in seismic designcodes due to the combined action of the horizontal androcking components: (1) considering a linear fundamen-tal mode shape for low-to-moderate rise buildings; (2)assuming that the horizontal and rocking componentsare perfectly correlated. In this case, code base shear canbe modified using Eq. 21:
Vnu ¼ V 1þ θ1ð Þ ð22ÞTo examine the applicability of the Eq. 22, at first,
the variations of ρwu as a function of period for theassumed SDFs is calculated (see Fig. 4). Next, thevariations of parameter θ1 versus vibration periods iscompared with the exact ratio of Vnu/V calculated fromthe dynamic analysis of a single degree of freedomsystem under considered SDFs and it is shown inFig. 5. It can be seen that the proposed formula canconservatively evaluate the seismic loading of struc-tures subjected to the rocking component. It can alsobe observed that for tall and short period structures,such as nuclear reactors, the seismic loading of
820 J Seismol (2012) 16:815–827

rocking components can be as large as translationalones or even larger. This phenomenon occurs becauseof the differences in the frequency content betweenrotational and translational components, and it canseriously affect seismic behavior of structures locatedon soft soil.
For engineering application, in order to use Eq. 22in seismic design codes, it may be assumed that theapparent velocity is conservatively equal to the aver-age shear wave velocity (Vs) in the top 30 m of theground profile, ρwu≅2/3, and η≅1. In this case, θ1 canapproximately be expressed as:
θ1 ffi 4:2H1
TVSð23Þ
where T is the fundamental period of the structure.
4 Torsional component in structural loading
The concept of center of rigidity (CR) arises fromsingle-story structures with rigid floor diaphragmwhere there is always a point on the floor (CR) which,if a static load (of arbitrary magnitude and direction) isapplied through this point, will translate the floorwithout rotation. This concept cannot always be ex-tended to multi-story structures in terms of a set ofpoints at the floor levels that possess the same prop-erty. However, there is a very special class of multi-story buildings, namely buildings having verticalresisting elements with proportional stiffness matrices,in which a set of the CRs can be defined in theaforementioned strict sense and lie on a commonvertical line (Riddel and Vasquez 1984; Tso 1990).Since seismic provisions are usually based on thestudies concerning the torsional response of single-story systems and dynamic response of plane frames(Kan and Chopra 1977; Tso and Dempsy 1980; Hejaland Chopra 1989; Ghafory-Ashtiany 2001); therefore,these provisions rigorously apply to the uniform multi-story shear or flexural type structures (proportionatebuildings).
Thus, in this section, a new formula for the inclu-sion of the loading effects of rotational groundmotions on the accidental eccentricity correspondingto the proportionate buildings is presented. In thiscase, because of the relationship between the baseshear and accidental eccentricity in seismic codes, itis necessary to consider combined action of horizontal,rocking and torsional on structural loading. To achievethis, at first, in order to give a basic insight intotorsional loading, the accidental eccentricity due onlyto torsional loading is presented in a static form. Next,a relation to evaluate the equivalent accidental eccen-tricity is derived using the numerical results obtainedfrom the dynamic analyses.
4.1 Static accidental eccentricity for a single-storybuilding
Consider a linear single-story building with orthogo-nal arrangement of lateral-load resisting systemconnected by rigid floor diaphragm as shown inFig. 8. For lateral force analysis in the x-direction,the building plan is treated as symmetric about the y-axis without loss of generality because building codes
0.5 1 1.5 2
0.5
0.6
0.7
0.8
0.9
1
T (sec)
ρ wu
considerd SDFsseismic codes
Fig. 4 Variations of ρwu versus period
0.5 1 1.5 20
0.5
1
1.5
2
2.5
3
3.5
4
θ 1
H=20mH=40mH=60m
Fig. 5 Variations of θ1 calculated from proposed formula (blacklines) and from dynamic analysis (gray lines) versus the struc-tural periods of a single degree of freedom system for H020, 40,and 60 m
J Seismol (2012) 16:815–827 821
need such independent analyses in the x- and y-directions.
In order to determine the static accidental eccentric-ity, estatica , with no important loss of generality, the UBC1997 values a ¼ d ¼ 1 is chosen in Eqs. 2.a and 2.b.The static accidental eccentricity is introduced as ratio ofthe induced maximum torsional moment due only to theearthquake torsional component, θgz, to lateral force dueto the simultaneous excitations of the earthquake rock-ing and horizontal components as follows:
estatica ¼ Mt � Vnue
Vnu¼ Kθ
K� θmax
umaxð24Þ
in whichMt is the total torque induced in the system dueto seismic loading of ground motions, K and Kθ are thelateral and torsional stiffness of the structure, θmax is thepeak rotational displacement due only to the torsionalexcitation. The normalized static accidental eccentricityis given using Eqs. 9 and 22:
estaticab ¼ estatica
b¼
ffiffiffi2
pKθwθ
2bKVA 1þ θ1ð Þ �SDu wθ; xð ÞSDu w1; xð Þ ð25Þ
where b is the plan dimension of the structure normal tothe considered direction of ground motion. DefiningΩ ¼ wθ w1= ¼ Kθ r2K
as the ratio between the
uncoupled torsional frequency and the lateral frequencyof the structure, assuming VA≅VS and using Eq. 23, thenEq. 25 can be simplified to:
estaticab ffiffiffiffi2
pp � r2Ω
b 4:2H1 þ TVSð Þ �SPAu wθ; xð ÞSPAu w1; xð Þ ð26Þ
where the radius of gyration about CR is r ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffib2 þ a2ð Þ 12=
p ¼ bffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1þ "2ð Þ 12=
pin which ε0a/b is
the plan aspect ratio, a is the side dimension parallel tothe lateral seismic loading, and the SPA is the pseudo-acceleration response spectrum. From Eq. 26, it can bededuced that the main effective structural parameters inthe torsional loading of an equivalent linear symmetricalone-story building are H1, T, b, ε, and Ω.
4.2 Equivalent accidental eccentricity for single-storybuildings
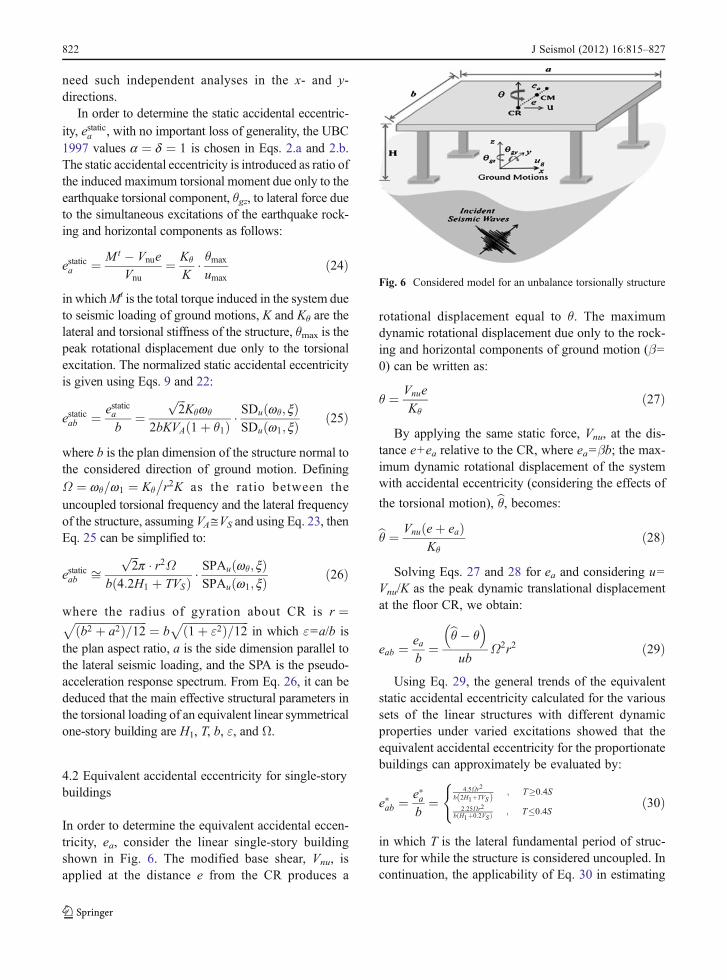
In order to determine the equivalent accidental eccen-tricity, ea, consider the linear single-story buildingshown in Fig. 6. The modified base shear, Vnu, isapplied at the distance e from the CR produces a
rotational displacement equal to θ. The maximumdynamic rotational displacement due only to the rock-ing and horizontal components of ground motion (β00) can be written as:
θ ¼ Vnue
Kθð27Þ
By applying the same static force, Vnu, at the dis-tance e+ea relative to the CR, where ea0βb; the max-imum dynamic rotational displacement of the systemwith accidental eccentricity (considering the effects of
the torsional motion), bθ, becomes:
bθ ¼ Vnu eþ eað ÞKθ
ð28Þ
Solving Eqs. 27 and 28 for ea and considering u0Vnu/K as the peak dynamic translational displacementat the floor CR, we obtain:
eab ¼ eab¼
bθ� θ� �
ubΩ2r2 ð29Þ
Using Eq. 29, the general trends of the equivalentstatic accidental eccentricity calculated for the varioussets of the linear structures with different dynamicproperties under varied excitations showed that theequivalent accidental eccentricity for the proportionatebuildings can approximately be evaluated by:
e�ab ¼e�ab¼
4:5Ωr2
b 2H1þTVSð Þ ; T0:4S
2:25Ωr2bðH1þ0:2VS Þ ; T0:4S
(ð30Þ
in which T is the lateral fundamental period of struc-ture for while the structure is considered uncoupled. Incontinuation, the applicability of Eq. 30 in estimating
Fig. 6 Considered model for an unbalance torsionally structure
822 J Seismol (2012) 16:815–827

the equivalent accidental eccentricity is examined. Toachieve this, the equivalent accidental eccentricity fordifferent values of the effective structural parametersis calculated by considering the system shown inFig. 6. The influences of the effective structuralparameters on the accidental eccentricity are shownin Figs. 7–11.
As it can be seen in Fig. 7, with the increase of theplan dimension and lateral fundamental frequency ofthe structure the accidental eccentricity will increase.Also, the equivalent accidental eccentricity decreasewith the increase of the static eccentricity. In general,the accidental eccentricity arrives at its maximum val-ue for symmetric structures. Figure 8 shows that for aconstant value of b, the decrease in the plan aspectratio of structure, ε, leads to the decrease of the acci-dental eccentricity. In fact, since the reduction in theratio a/b results in decreasing the ratio r/b; therefore,according to Eq. 26, it can easily be inferred why thiscauses that the accidental eccentricity reduces.
Figures 9 and 10 show the effects of the frequencyratio Ω on the value of the accidental eccentricity. Twopoints can be drawn from these figures: First, the in-crease in eab is largest for symmetric torsionally stiffstructures. Also, the increase in accidental eccentricitycalculated by dynamic analysis for the symmetric sys-tem with Ω � 1 tends to be smaller than that predictedby proposed formula given in Eq. 30, and vise versa forΩ � 1 and T � 0:9sec. Second, for asymmetric struc-tures the effects of the static eccentricity on eab decreasewith the increase of period and decrease of frequencyratio. This variation of Ω and its influence on the valueof the accidental eccentricity implies to an importantproperty of torque loading due to the torsional compo-nent. Indeed, a common assumption in seismic design ofstructures is that the effects of the lateral–torsional cou-pling on the seismic response of in-plan irregular sys-tems decrease as increasing Ω, but here, it has beenshown that increase in the value of Ω can converselyincrease torque loading of torsional components. Thus,it should be kept in mind that increase of Ω does notgenerally result in reducing the torsional effects in seis-mic behavior of structures. Apparently, for a deeperinsight into this area requires more research.
As shown in Fig. 11, when the height of structureincreases the rotational loading due to the rockingmotions can cause the accidental eccentricitydecreases. Indeed, when the total lateral loading forceof structure increases, the simultaneous seismic
loading of the rocking and translational motions causethat a smaller accidental eccentricity is needed toproduce a constant torsional moment in structure.
Although proposed formula underestimates the ac-cidental eccentricity for symmetric tall structureswhich are torsionally stiff, relative to the numericalresults of dynamic analysis but this difference betweenthe results is negligible. The above observations indi-cate that the proposed formula can efficiently estimate
Fig. 7 Variation of accidental eccentricity as a function ofperiod for structure with square plan and for effective parame-ters of e/r00, 0.1, 0.2, Ω01, H00, and b020, 40, 60m
J Seismol (2012) 16:815–827 823

the maximum values of the normalized equivalentaccidental eccentricity, eab, for the type of the struc-tural systems that have considered in this study. Itshould also be noted that the accidental eccentricityspecification of β00.05 is not an acceptable estima-tion for wide symmetric multi-story buildings whichhaving short fundamental period and large value of Ω.However, since the symmetric structures are very rareand even in such systems, an uneven distribution of
mass (for example live load) may cause eccentricity;therefore, the value of β00.05 in seismic codes maybe a fairly good approximation of the maximum acci-dental eccentricity in common structures due only tothe earthquake torsional component. To verify this,further research and study on multi-story buildingswith modern structural designs are needed.
Fig. 8 Variation of accidental eccentricity (gray line: e�ab, blackline: eab) versus ε0a/b, for structure with b060 m and foreffective parameters of e/r00, T00.4, 0.8 s of, H00, and Ω00.5, 1, 1.5
Fig. 9 Variation of accidental eccentricity as a function ofperiod for structure with b060 m and for effective parametersof e/r00, 0.1, 0.2, ε01, H00, and Ω00.5, 1, 1.5
824 J Seismol (2012) 16:815–827

5 Limitations
The relationships developed in this study are based onthe some major limitations as follows:
First, the effects of spatial variation of body waveshave only been considered to present formulas for therotational loading of structures. It should be noted that
there are other phenomena that can lead to the rota-tional excitations of structures such as surface waves,special rotational waves, block rotation, topographiceffects, and soil structure interaction.
Second, a single apparent velocity has been assumedto take into account the wave passage effects. Although,authors are aware that this assumption ignores the dis-persion of SGM waves, but we believe that its use is
Fig. 10 Variation of accidental eccentricity as a function of Ω,for structure with b060 m and for effective parameters of e/r00,0.1, 0.2, ε01, H00, and T00.4, 0.8, 1.2 s
Fig. 11 Variation of accidental eccentricity as a function ofperiod for structure with b060 m and for effective structuralparameters of e/r00, 0.1, 0.2, Ω01, ε01, and H00, 20, 40m
J Seismol (2012) 16:815–827 825

justified as a first step in the development of simplequantitative criteria for engineering applications.
Third, the effect of the phase-delay between earth-quake rotational and translational components on theseismic loading of structures has conservatively beenignored. It should be kept in mind that in real con-ditions, due to the phase-shift and interaction betweenthe rotational and translational components, the effectsof rotational components may be beneficial on theseismic loading of the structures and lead to the re-duction of structural responses.
Finally, the new formulas proposed herein does notaccount for inelastic actions of the structures. Al-though, this approach has the advantage of clear phys-ical interpretation of seismic behavior of structuressubjected to rotational excitation but the conclusionsdrawn are only applicable to the engineering structureswhich remain elastic during small and moderateearthquakes.
6 Conclusions
The new formulas for inclusion of the earthquakerotational motion effects in the seismic loading oflow-rise multi-story buildings have been presented.The effective structural parameters in the rotationalloading of such structures have been determined andtheir influences on the linear dynamic behavior ofstructures have been studied. The following conclu-sions based on the trends of the numerical resultsobtained and under the assumptions of this studymay be drawn:
& The acceleration response spectra of rotationalcomponents tend to decay faster than correspondingtranslational ones as periods of vibration increase.Thus, the seismic loading of these motions on theoverall behavior of long-period structures (T≥2 s)may be ignored.
& The rotational acceleration components are of morehigh frequency than corresponding translationalones. Thus, they may remarkably change seismicloading of the structures which are sensitive to thehigh-frequency motions, such as the secondary sys-tems. The contribution of these components to theseismic excitation of tall short-period structures likenuclear reactors can be as large as translational onesor even larger.
& The effects of the torsional acceleration compo-nent on structural loading tend to increase with theincrease of Ω and the radius of gyration of thebuilding floors. In contrast, it decreases by increas-ing the static eccentricity and fundamental lateralperiod of building.
& In asymmetric structures, with the increase of pe-riod and the decrease of frequency ratio Ω, theinfluences of static eccentricity on eab decreaseand it approaches to a small constant value. Be-sides, the effects of torsional motions can be ig-nored for tall multi-story buildings which havestrong asymmetry in plan.
& The value of the eccentricity 0.05b which pre-scribed in most of the current seismic design codesfor the accidental torsional effects is mostly aconservative approximation for accidental eccen-tricity due only to the influences of the torsionalcomponent in asymmetric buildings.
Acknowledgments Authors wish to thank anonymousreviewers of this paper because of their constructive and valu-able comments on the paper.
References
De La Llera JC, Chopra AK (1994) Accidental torsion in build-ings due to base rotational excitation. Earthquake EngStruct Dynam 23:1003–1021
Eurocode 8, Design provisions for earthquake resistance ofstructures, European Committee for Standardization, Part6: Tower, masts, and chimneys, EC8.6 (2005) EN1998-6.
Ghafory-Ashtiany M (2001) The effect of random mass, stiff-ness and eccentricity parameters on seismic response oftorsional system. Iranian Journal of Science & Technology25:93–114
Ghafory-Ashtiany M, Falamarz-Sheikhabadi MR (2010) Evalu-ation influence of rotational components on the behavior ofstructures, Report International Institute of Earthquake En-gineering and Seismology, IIEES, in Farsi
Ghafory-Ashtiany M, Singh MP (1984) Seismic response formulti-component earthquakes, Report No. VPI-E-84, VPI& SU, USA
Ghafory-Ashtiany M, Singh MP (1986) Structural response forsix correlated earthquake components. Earthquake EngStruct Dynam 14:103–119
Ghayamghamian MR, Nouri GR (2007) On the characteristicsof ground motion rotational components using Chiba densearray data. Earthquake Eng Struct Dynam 36:1407–1429
Ghayamghamian MR, Nouri GR, Igel H, Tobita T (2009) Theeffects of torsional ground motion on structural responses:code recommendation for accidental eccentricity. BullSeismol Soc Am 99:1261–1270
826 J Seismol (2012) 16:815–827

Hao H (1996) Characteristics of torsional ground motions.Earthquake Eng Struct Dynam 25:599–610
Hejal R, Chopra AK (1989) Earthquake analysis of a class oftorsionally coupled buildings. Earthquake Eng StructDynam 18:305–323
Kalkan E, Grazer V (2007) Coupled tilt and translational groundmotion response spectra. J Earthquake Eng 133:609–619
Kan CL, Chopra AK (1977) Elastic earthquake analysis of aclass of torsionally coupled buildings. J Struct Div103:821–838
Lee VW, Trifunac MD (2009) Empirical scaling of rotationalspectra of strong earthquake ground motion. Bull SeismolSoc Am 99:1378–1390
Li HN, Sun LY, Wang SY (2004) Improved approach for obtain-ing rotational components of seismic motion. Nucl EngDes 232:131–137
Newmark NM (1969) Torsion in symmetrical building, Proc. 4thworld conf. earthquake eng. Santiago, Chile 2, A.3 19–32
Pujol J (2009) Tutorial on rotations in the theories of finite defor-mation andmicropolar (Cosserat) elasticity. Bull Seismol SocAm 99:1011–1027
Riddel R, Vasquez J (1984) Existence of centers of resistanceand torsional uncoupling of earthquake response of build-ings, Proc. of 8th World Conference on. Earthquake Engi-neering 4:187–194
Ruiz R, Penzien J (1969) Probabilistic study of the behaviour ofstructures during earthquakes, Report EERC-69-03, Earth-quake Engineering Research Center, University of Californiaat Berkeley, CA
Rutenberg A, Heidebrecht AC (1985) Response spectra fortorsion, rocking and rigid foundations. Earthquake EngStruct Dynam 13:543–557
Shakib H, Tohidi RZ (2002) Evaluation of accidental eccentric-ity in buildings due to rotational component of earthquake.J Earthquake Eng 6:431–445
Trifunac MD (1982) A note on rotational components of earth-quake motions on ground surface for incident body waves.Soil Dynam Earthquake Eng 1:11–19
Trifunac MD (2009) The role of strong motion rotations in theresponse of structures near earthquake faults. Soil DynEarthq Eng 29:382–393
Tso WK (1990) Static eccentricity concept for torsional momentestimations. J Struct Eng 116:1199–1212
Tso WK, Dempsy KM (1980) Seismic torsional provisions fordynamic eccentricity. Earthquake Eng Struct Dynam8:275–289
Twiss RJ, Souter BJ, Unruh JR (1993) The effects of blockrotations on the global seismic moment tensor and thepatterns of seismic P and T axes. J Geophys Res 98:645–674
Uniform Building Code, International Conference of BuildingOfficials, (1997).
Zembaty Z (2009) Rotational seismic load definition in Euro-code 8, part 6, for slender tower-shaped structures. BullSeismol Soc Am 99:1483–1485
Zembaty Z, Boffi G (1994) Effect of rotational seismic groundmotion on dynamic response of slender towers. Eur EarthqEng 1:3–11
J Seismol (2012) 16:815–827 827

Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.