ap physics 1 montwood high school r. casao rotational dynamics
TRANSCRIPT
AP Physics 1Montwood High School
R. Casao
Rotational Dynamics
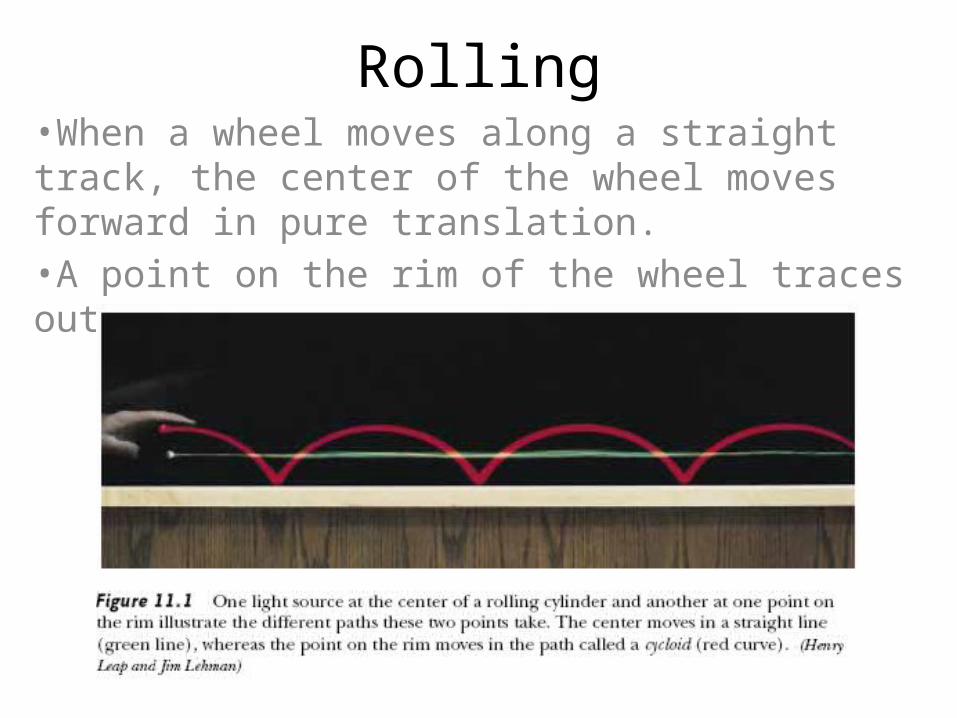
Rolling•When a wheel moves along a straight track, the center of the wheel moves forward in pure translation. •A point on the rim of the wheel traces out a complex path called a cycloid.

• For a wheel passing at constant speed while rolling smoothly (no sliding):– the center of mass O of the wheel moves forward at
constant speed vcom.– the point P where the wheel makes contact with the
surface also moves forward at speed vcom so that it remains directly below the center of mass O.
• During time interval t, bothO and P move forward bya distance s. Observerssee the wheel rotate thru anangle q about the center of the wheel.
t1 = 0 t2 = t
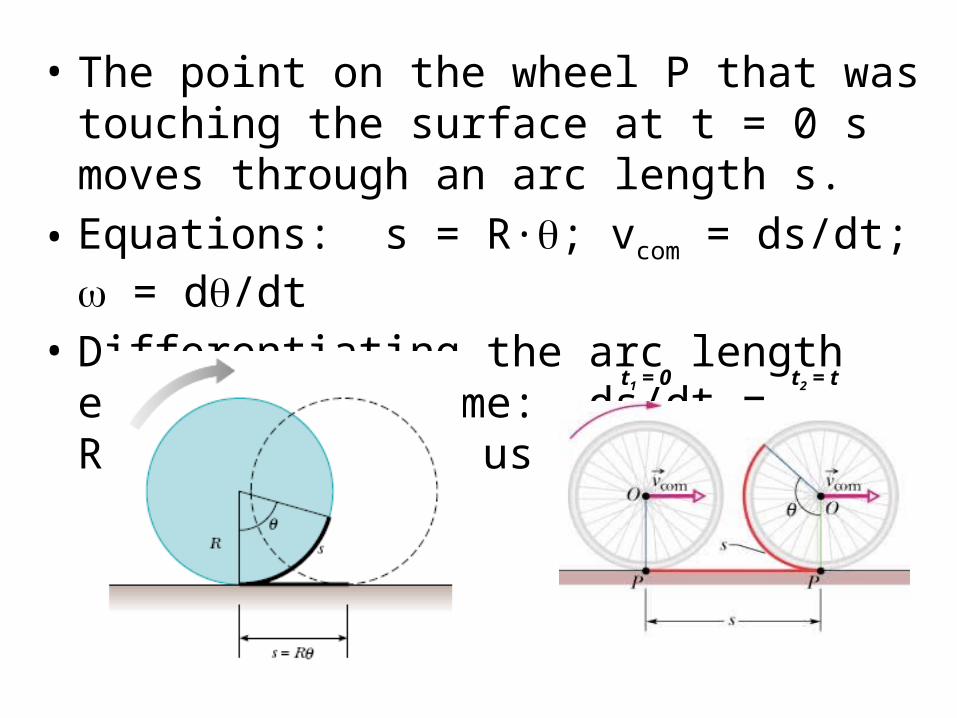
• The point on the wheel P that was touching the surface at t = 0 s moves through an arc length s.
• Equations: s = R·; vcom = ds/dt; = d/dt• Differentiating the arc length equation wrt time:
ds/dt = R·d/dt to give us vcom = R·.
t1 = 0 t2 = t
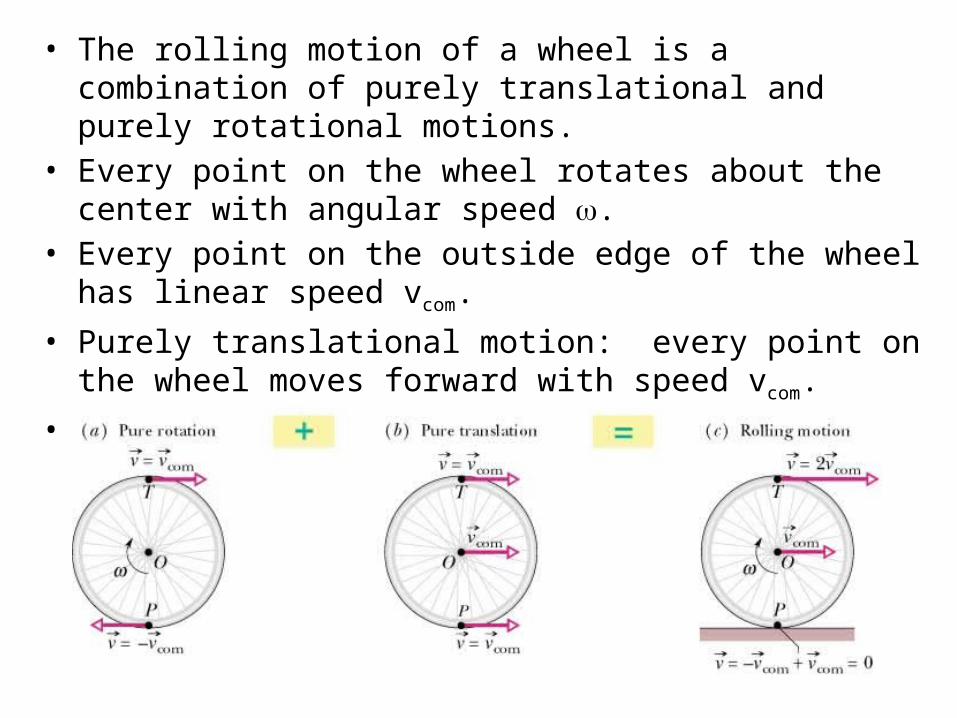
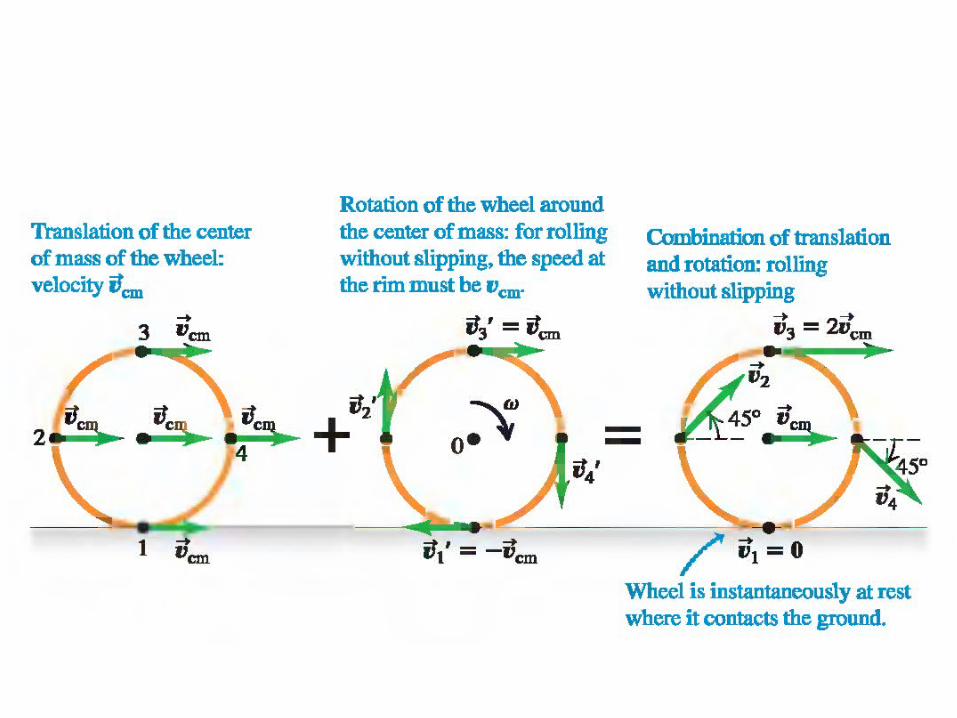
• The rolling motion of a wheel is a combination of purely translational and purely rotational motions.
• Every point on the wheel rotates about the center with angular speed .
• Every point on the outside edge of the wheel has linear speed vcom.• Purely translational motion: every point on the wheel moves
forward with speed vcom.• Combination of rotational motion and translational motion
produces the rolling motion of the wheel.
• The portion of the wheel at the bottom (point P) is stationary and the top of the wheel is moving at speed 2·vcom. The wheel is moving fastest near the top than near the bottom because the spokes are more blurred at the top than at the bottom.
Rotational Inertia
• Rotational inertia or moment of inertia I is the resistance of an object to changes in its rotational motion.
• Rotational inertia I is the rotational equal of mass M.
• Rotational inertia depends on:– Mass– Distribution of that mass around the axis of
rotation.
Torque and Rotational Inertia
• The farther the mass is from the axis of rotation, the greater the rotational inertia (the more difficult it is to rotate the object or to stop its rotation).
• Units: kg·m2
• Torque T is the application of a force which changes the angular acceleration of the object.
• Newton’s Second Law for Rotation:
IT
Torque and Rotational Inertia
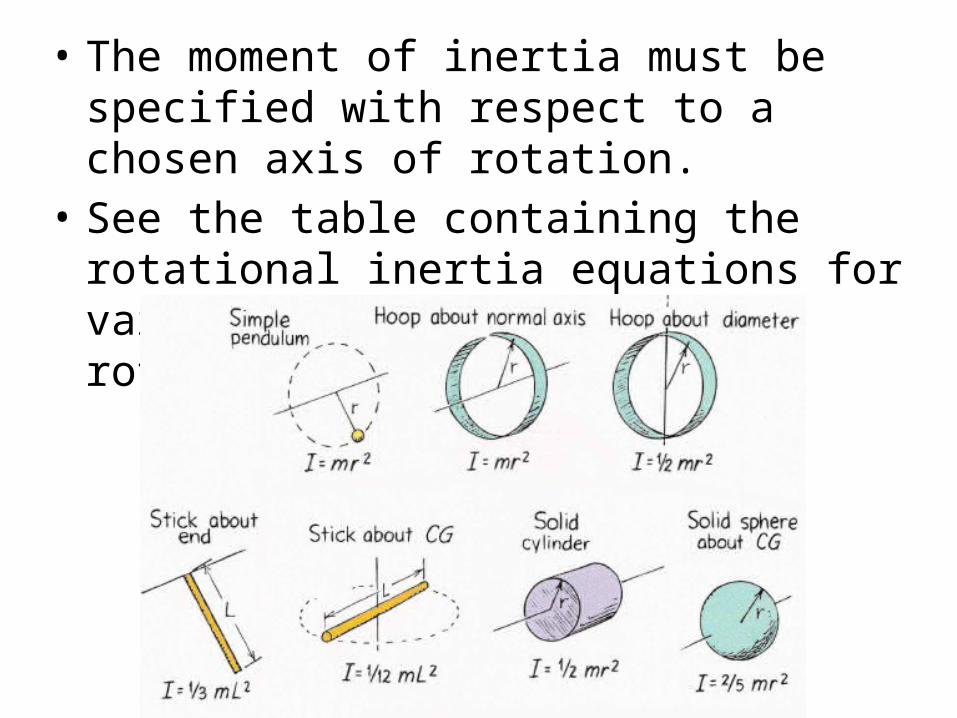
• The moment of inertia must be specified with respect to a chosen axis of rotation.
• See the table containing the rotational inertia equations for various shapes and axes of rotation.
2s
radinIrF
rFT
• An object rotating about an axis tends to remain rotating about the same axis unless interfered with by some external influence. Bodies that are rotating tend to remain rotating, while non-rotating bodies tend to remain non-rotating.• If we wish to change the rate of rotation
about an axis (change of angular velocity), we must apply a torque about the axis.
• The angular acceleration a this torque produces depends on the mass of the rotating object and upon the distribution of its mass with respect to the axis of rotation.• If the mass remains fixed in position, torque and angular
acceleration are directly proportional.• If the mass is closer to the axis of rotation, the acceleration
produced by the given torque is greater than if the mass is farther from the axis of rotation.• Moving the mass farther from the axis of rotation changes
the distribution of the mass and increases the rotational inertia. The greater the distance between the bulk of the mass of an object and the axis about which rotation takes place, the greater the rotational inertia.
Industrial flywheels are constructed so that most of their mass is concentrated along the rim. Once rotating, they have a greater tendency to remain rotating than they would if their mass were concentrated nearer the axis of rotation.
The greater the rotational inertia of an object, the harder it is to change the rotational state of the object. If rotating, it is difficult to stop; if at rest, it is difficult to rotate.
Equation: F·r = I·; the units for rotational inertia are kg·m2/rad2.
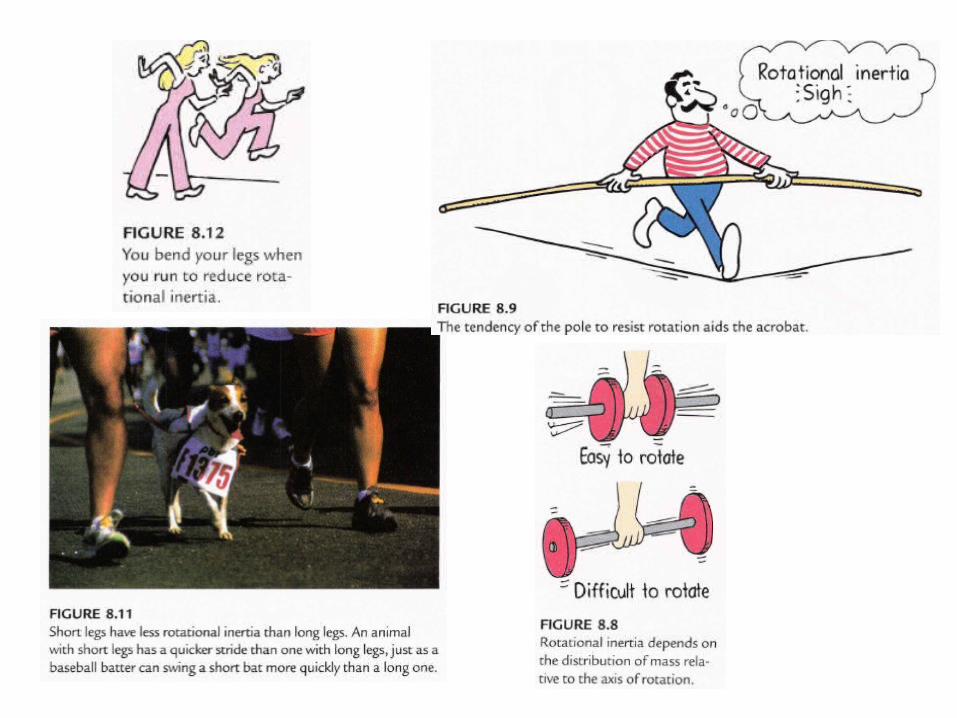
Rotational inertia and legs: short legs have less rotational inertia than long legs. An animal with shorter legs has a quicker stride than one with long legs (same is true for pendulums). When running, we bend our legs to reduce the rotational inertia so that we can rotate them back and forth more quickly.
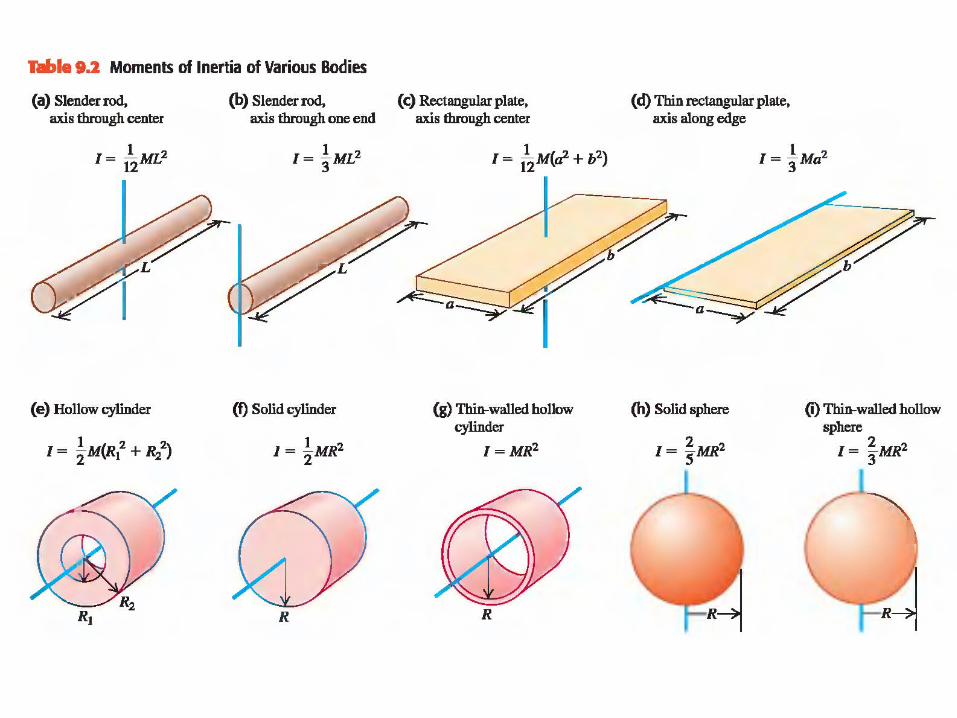
• The moment of inertia must be specified with respect to a chosen axis of rotation.
• See the table containing the rotational inertia equations for various shapes and axes of rotation.
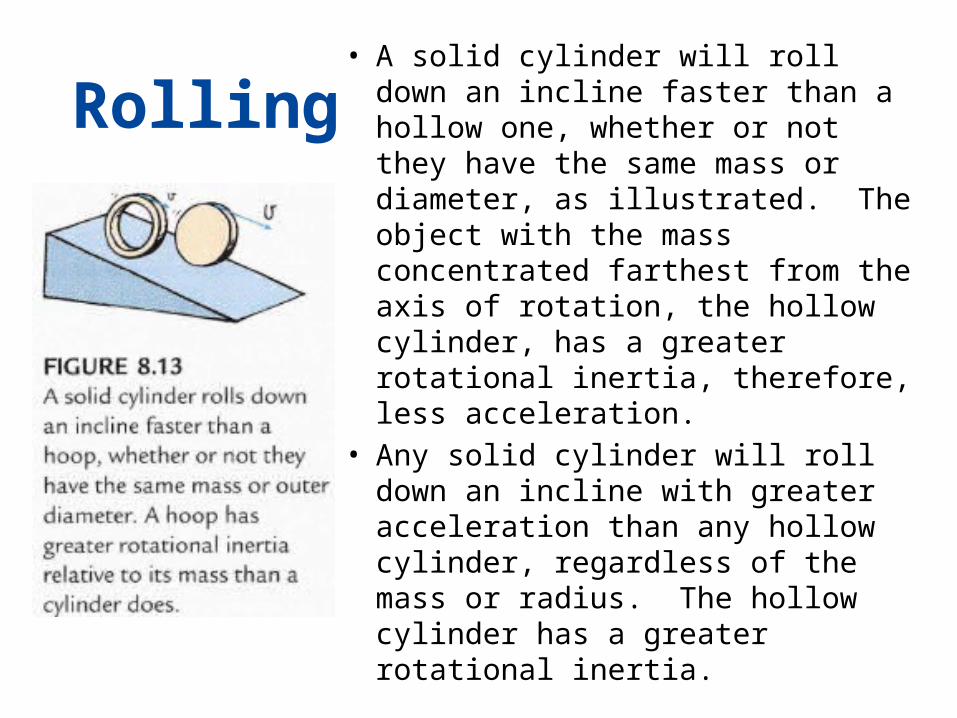
Rolling• A solid cylinder will roll down an
incline faster than a hollow one, whether or not they have the same mass or diameter, as illustrated. The object with the mass concentrated farthest from the axis of rotation, the hollow cylinder, has a greater rotational inertia, therefore, less acceleration.
• Any solid cylinder will roll down an incline with greater acceleration than any hollow cylinder, regardless of the mass or radius. The hollow cylinder has a greater rotational inertia.
• Objects of the same shape but different sizes will accelerate equally when rolled down an incline. The objects have the same rotational inertia per mass.
• Just as the different masses of objects in free fall do not influence the acceleration, the different masses of the rolling objects does not influence the acceleration.
• When rotation is introduced, the object with the larger rotational inertia compared to its own mass has the greater resistance to a change in its motion.
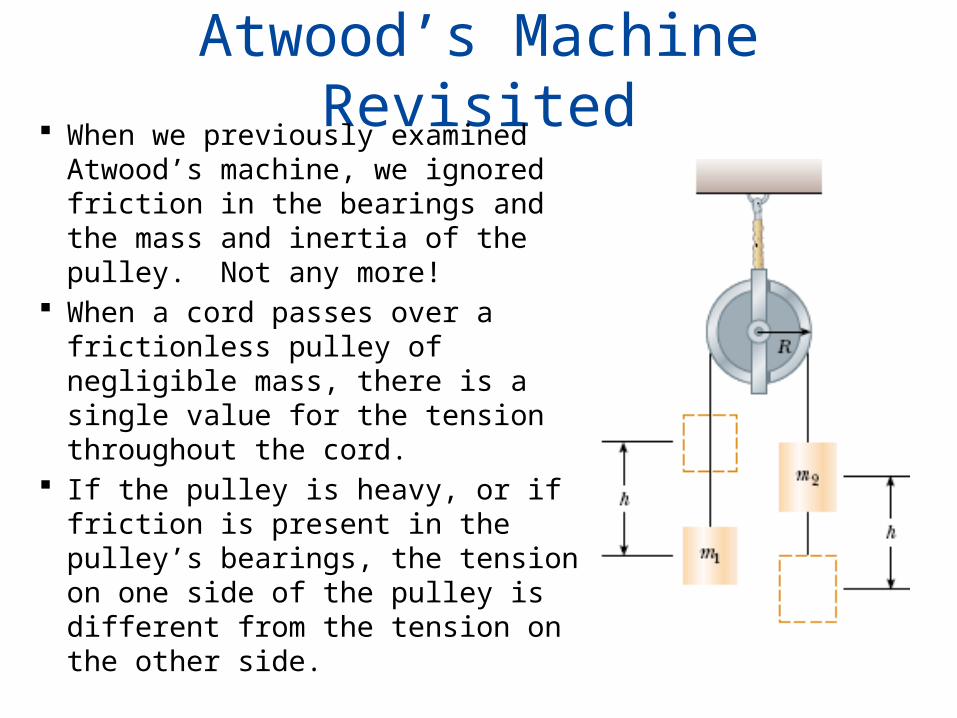
Atwood’s Machine Revisited When we previously examined
Atwood’s machine, we ignored friction in the bearings and the mass and inertia of the pulley. Not any more!
When a cord passes over a frictionless pulley of negligible mass, there is a single value for the tension throughout the cord.
If the pulley is heavy, or if friction is present in the pulley’s bearings, the tension on one side of the pulley is different from the tension on the other side.
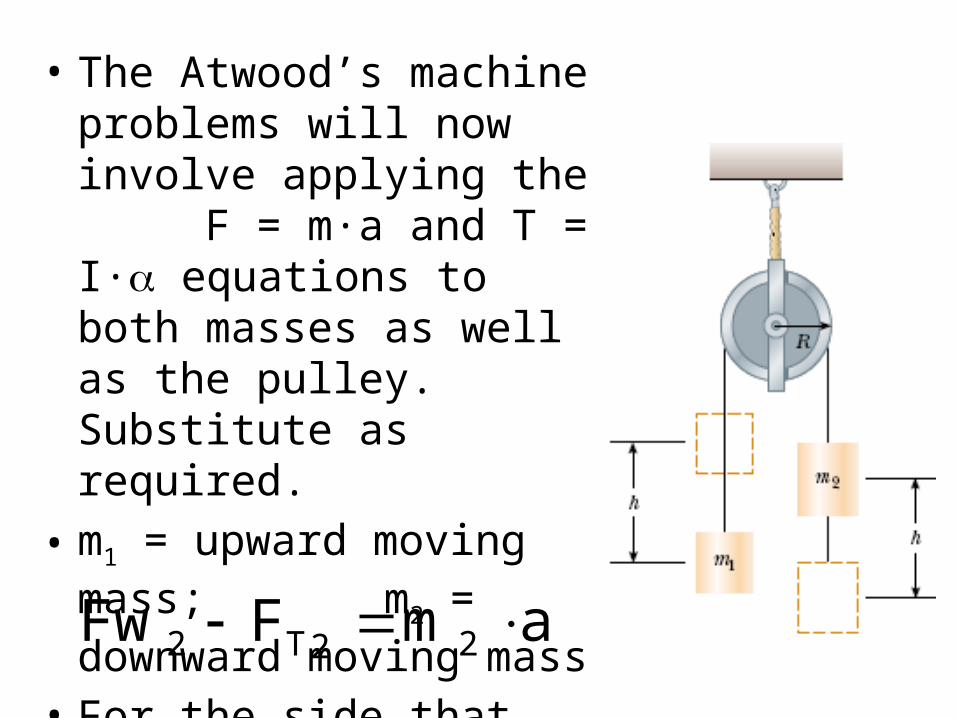
• The Atwood’s machine problems will now involve applying the F = m·a and T = I· equations to both masses as well as the pulley. Substitute as required.
• m1 = upward moving mass; m2 = downward moving mass
• For the side that accelerates downward: amFFw 22T2
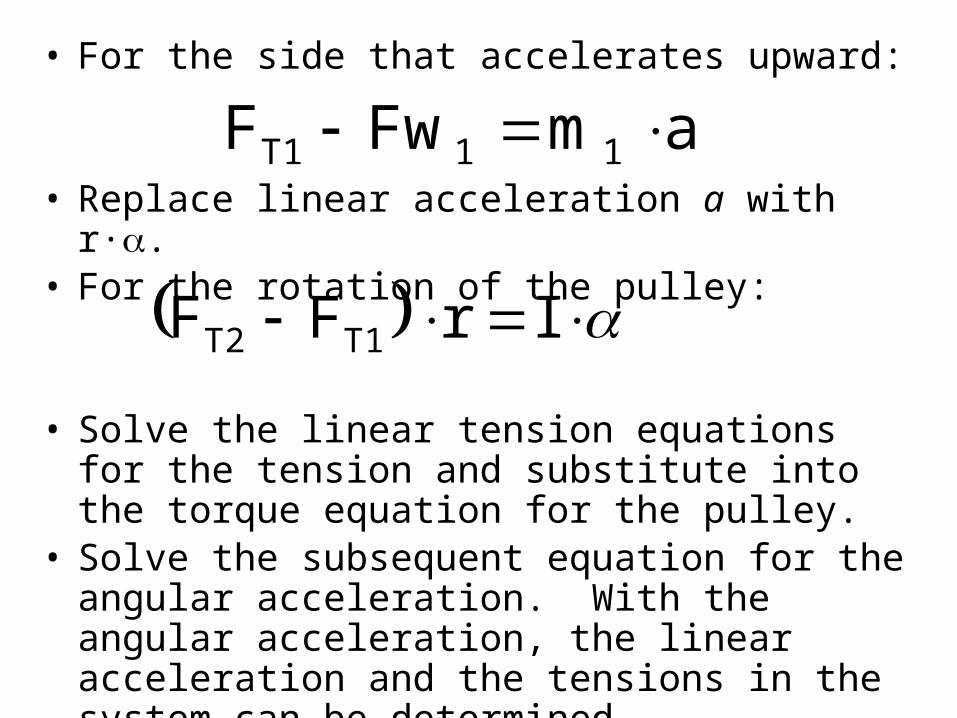
• For the side that accelerates upward:
• Replace linear acceleration a with r·.• For the rotation of the pulley:
• Solve the linear tension equations for the tension and substitute into the torque equation for the pulley.
• Solve the subsequent equation for the angular acceleration. With the angular acceleration, the linear acceleration and the tensions in the system can be determined.
amFwF 11T1
IrFF T1T2
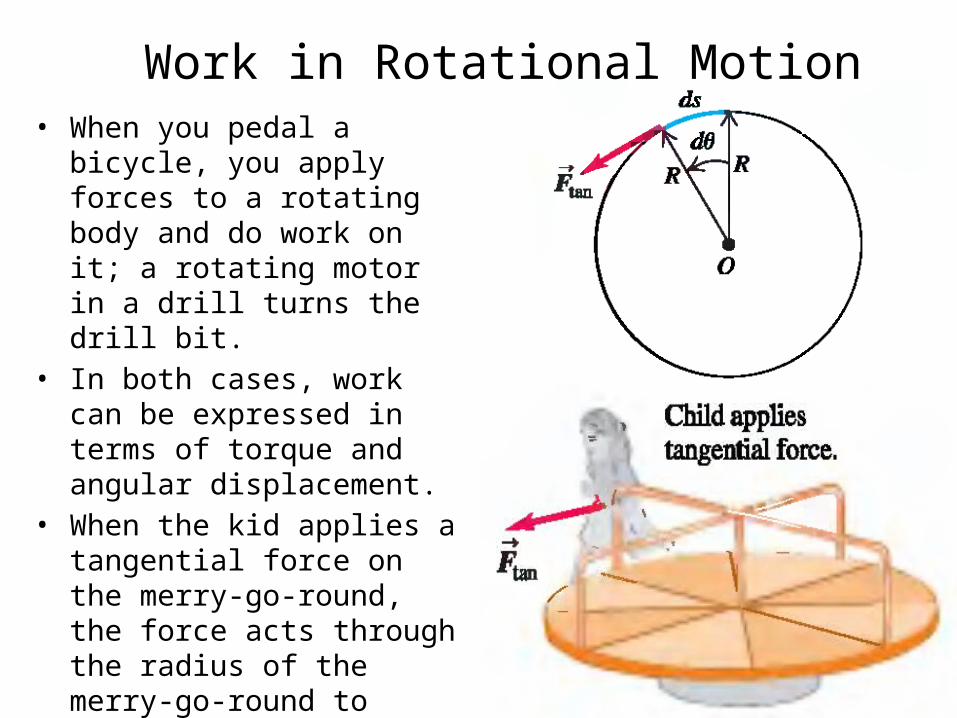
Work in Rotational Motion• When you pedal a bicycle, you
apply forces to a rotating body and do work on it; a rotating motor in a drill turns the drill bit.
• In both cases, work can be expressed in terms of torque and angular displacement.
• When the kid applies a tangential force on the merry-go-round, the force acts through the radius of the merry-go-round to produce a torque which will cause the merry-go-round to turn through an angular displacement .
• Avoiding the calculus: the work done by the force as the merry-go-round rotates is:
W = T or W = Frq has to be in radians
• If the torque remains constant while the angle changes from 1 to 2, then:
• If torque is in N·m and is in radians, work is in joules J.• When an object is accelerating, the net torque is:
12TTW
fFT T I
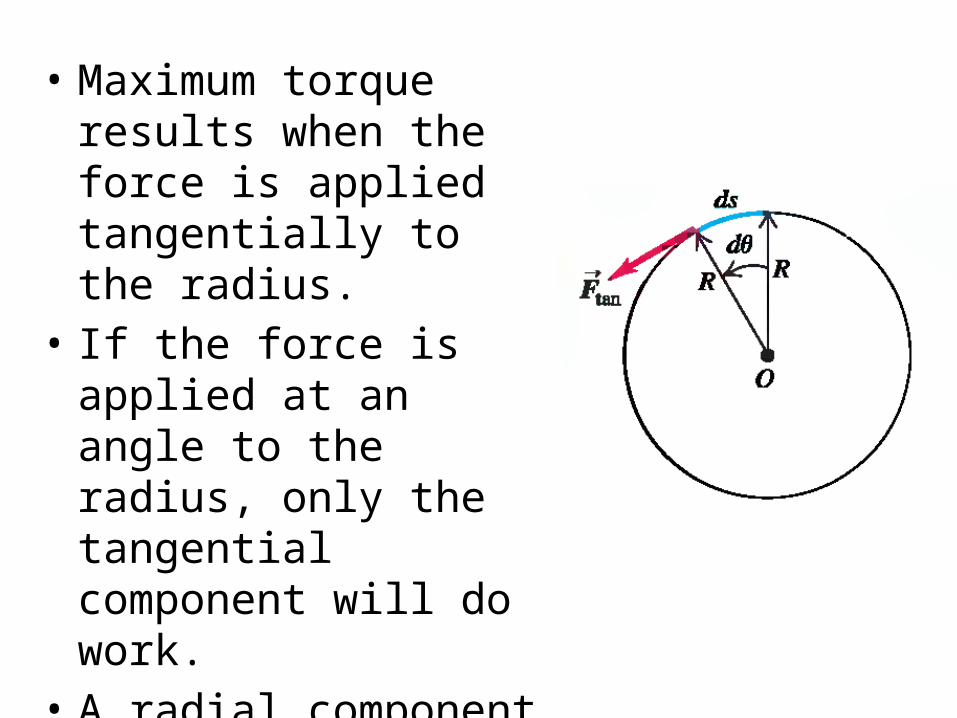
• Maximum torque results when the force is applied tangentially to the radius.
• If the force is applied at an angle to the radius, only the tangential component will do work.
• A radial component would pass through the pivot and the torque would be 0 N·m.
Power and Rotational Motion• When a torque acts on a body that rotates with
angular velocity , the power (rate of doing work) is: P = T·
• If torque is in N·m and is in rad/s, power is in watts W.
• Once an object is rotating at constant angular velocity ω, the only torque needed to keep the object rotating is the frictional torque; P = TFf·ω

Rotational Kinetic Energy• When a torque does work on a rotating rigid
body, the kinetic energy changes by an amount equal to the work done (work-energy theorem).
Work = ΔKlinear + ΔKrotary
• Rotating bodies often have two types of kinetic energy (Work = ΔKrotary ):– the kinetic energy due to the linear motion of the
object and,– the kinetic energy due to the rotational motion of
the object.

Rotational Kinetic Energy– Linear kinetic energy: Klinear = 0.5·m·v2
– Rotational kinetic energy: Krotational = 0.5·I·w2
– Total kinetic energy: Ktotal = Klinear +Krotational
• Many problems ask for the translational velocity of a rolling object, using v = ·r, solve for = v/r and substitute this into the rotational kinetic energy equation.
Translational Velocity of Solid Ball at the Bottom of an Incline
• Potential energy at the top of an incline is transformed into kinetic energy at the bottom of the incline.
• Kinetic energy = 0.5·m·v 2 + 0.5·I·2
• Rotational inertia for a solid ball: 0.4·m·r 2
• Relationship between linear and angular velocity: v = ·r; = v/r
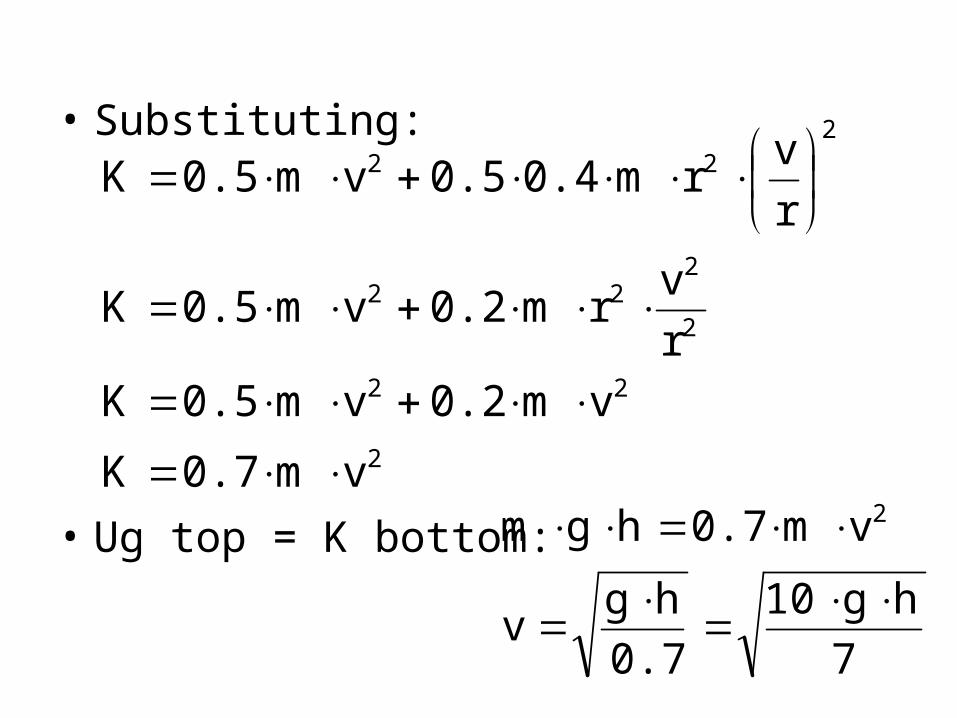
• Substituting:
• Ug top = K bottom:
2
22
2
222
222
vm0.7K
vm0.2vm0.5Krv
rm0.2vm0.5K
rv
rm0.40.5vm0.5K
7hg10
0.7hg
v
vm0.7hgm 2
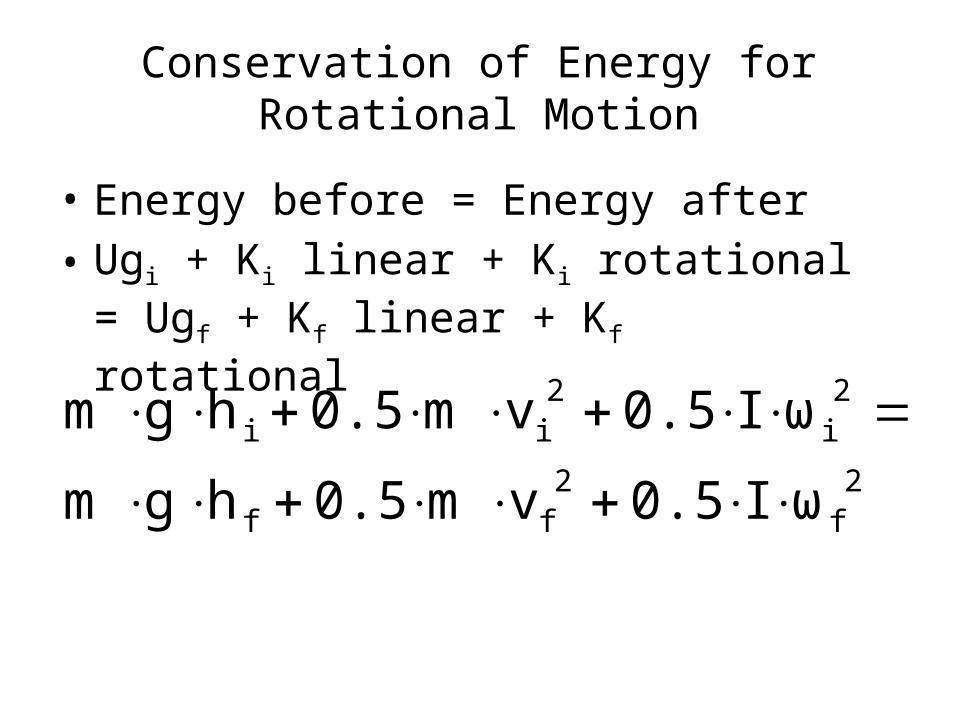
Conservation of Energy for Rotational Motion
• Energy before = Energy after• Ugi + Ki linear + Ki rotational = Ugf + Kf linear +
Kf rotational
2f
2ff
2i
2ii
ωI0.5vm0.5hgm
ωI0.5vm0.5hgm

Conservation of Energy for Rotational Motion
• Energy before = Energy after• Ugi + Ki linear + Ki rotational = Ugf + Kf linear +
Kf rotational
2f
2ff
2i
2ii
ωI0.5vm0.5hgm
ωI0.5vm0.5hgm
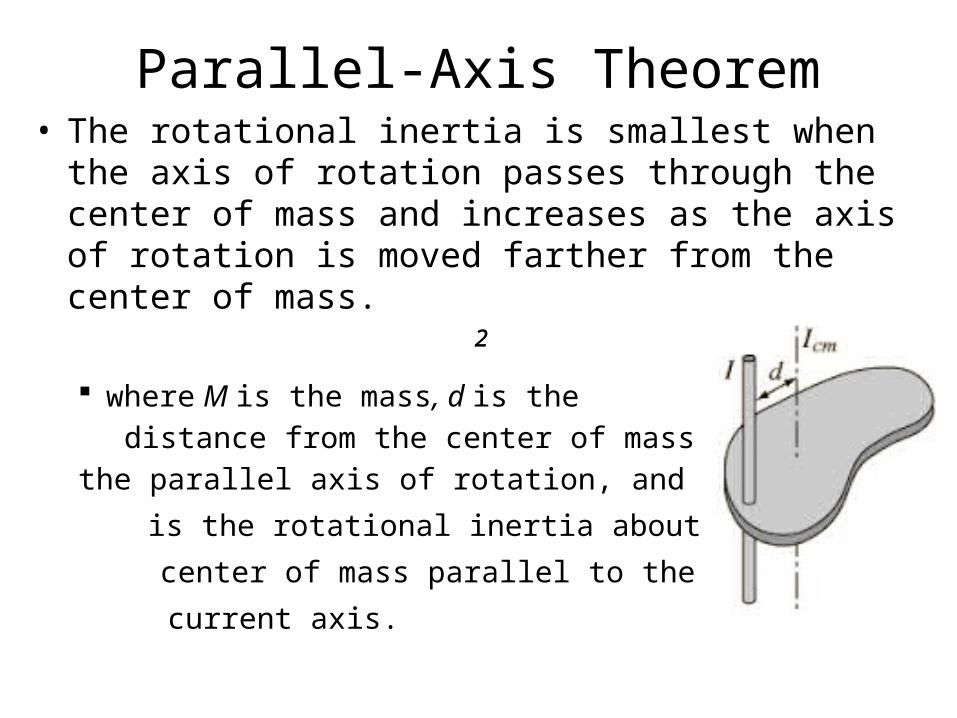
Parallel-Axis Theorem• The rotational inertia is smallest when the
axis of rotation passes through the center of mass and increases as the axis of rotation is moved farther from the center of mass.
² where M is the mass, d is the distance from the center of mass to
the parallel axis of rotation, and Icm
is the rotational inertia about the
center of mass parallel to the
current axis.
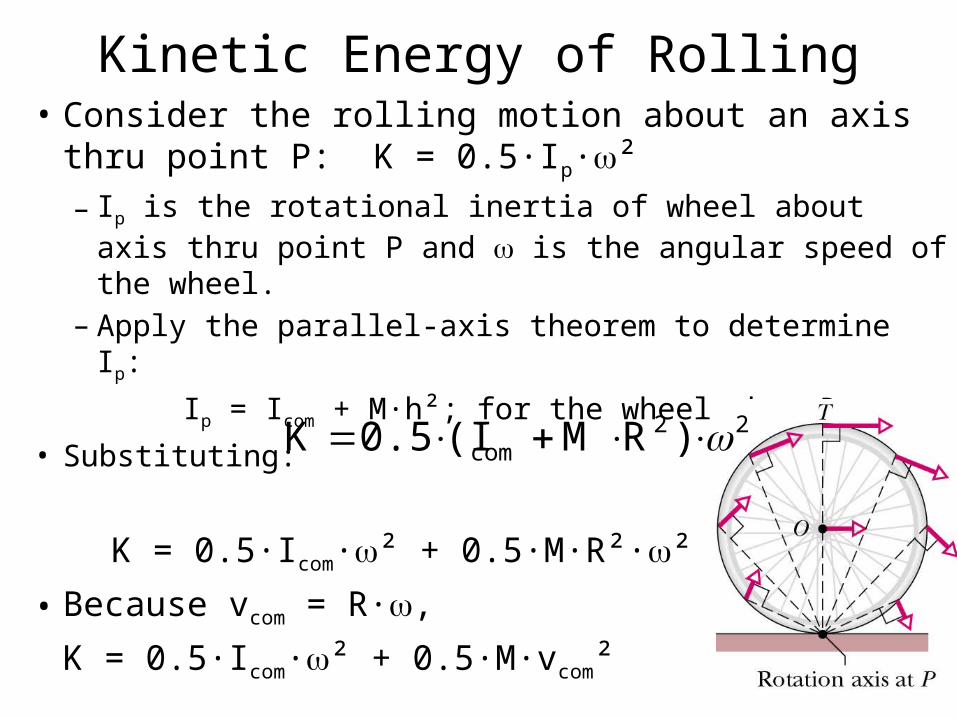
• Consider the rolling motion about an axis thru point P: K = 0.5·Ip·²– Ip is the rotational inertia of wheel about axis thru point P
and is the angular speed of the wheel.– Apply the parallel-axis theorem to determine Ip:
Ip = Icom + M·h²; for the wheel, h = R• Substituting:
K = 0.5·Icom·² + 0.5·M·R²·²
• Because vcom = R·,
K = 0.5·Icom·² + 0.5·M·vcom²
Kinetic Energy of Rolling
22com )RM(I0.5K
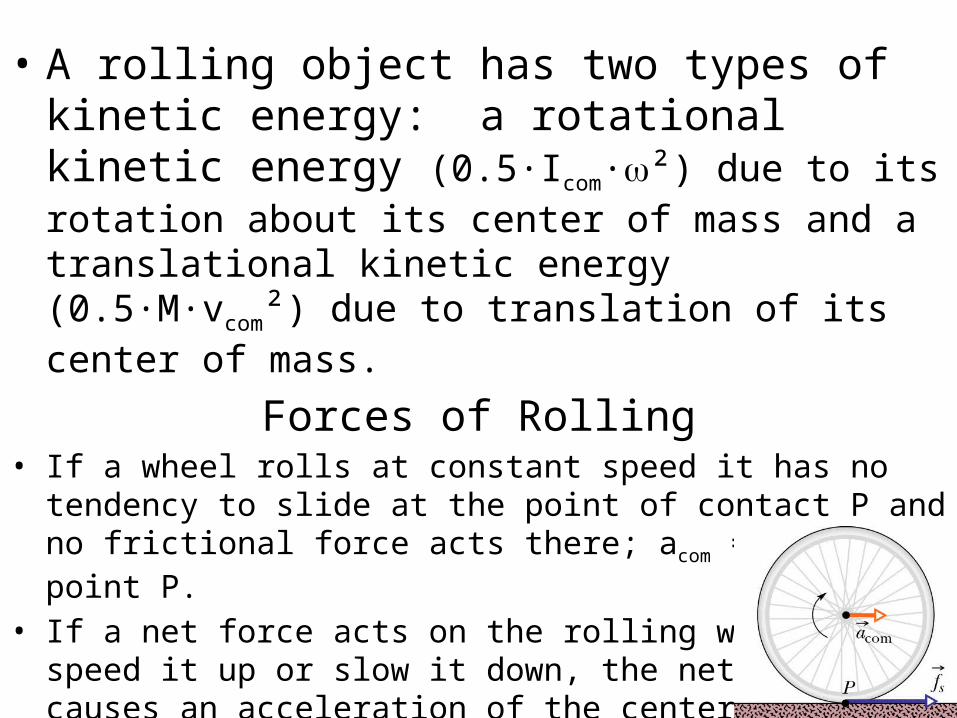
• A rolling object has two types of kinetic energy: a rotational kinetic energy (0.5·Icom·²) due to its rotation about its center of mass and a translational kinetic energy (0.5·M·vcom²) due to translation of its center of mass.
Forces of Rolling• If a wheel rolls at constant speed it has no tendency to slide at the
point of contact P and no frictional force acts there; acom = 0 at point P.
• If a net force acts on the rolling wheel to speed it up or slow it down, the net force causes an acceleration of the center of mass along the direction of travel.

• The wheel also rotates faster or slower, so an angular acceleration occurs about the center of mass.
• These accelerations tend to make the wheel slide at point P and a frictional force must act on the wheel at P to oppose the tendency to slide.
• If the wheel does NOT slide, the force is a static frictional force fs and the motion is smooth rolling motion.
• Smooth rolling motion: acom = R·• If the wheel does slide when the net force acts on it,
the frictional force that acts at P is a kinetic frictional force and the motion is not smooth rolling motion.
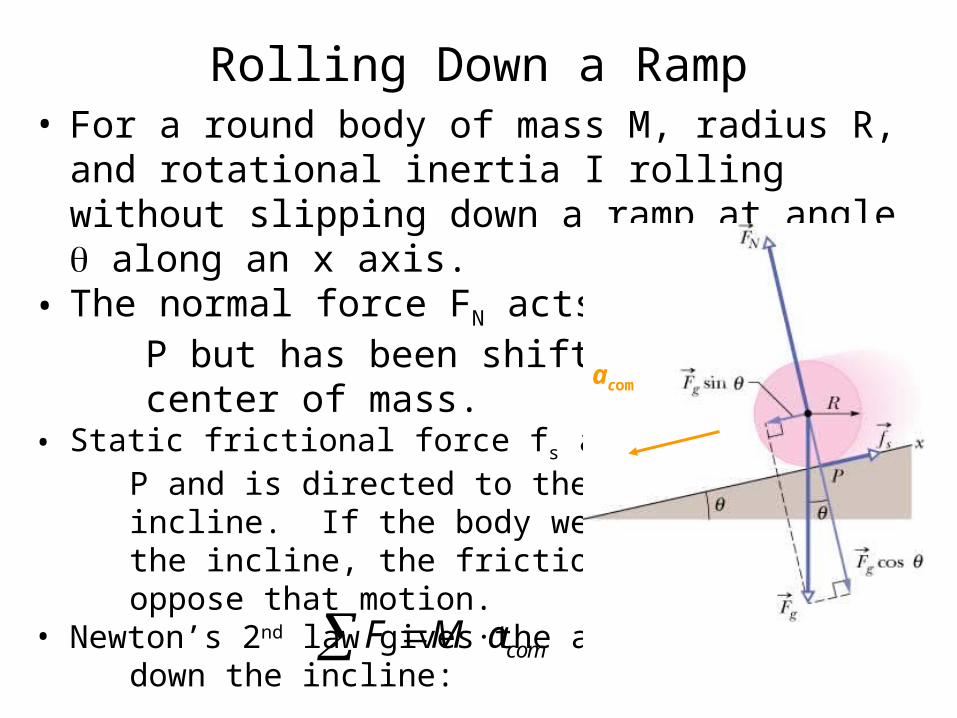
• For a round body of mass M, radius R, and rotational inertia I rolling without slipping down a ramp at angle along an x axis.
• The normal force FN acts at point P but has been shifted up to the center of mass.• Static frictional force fs acts at point P and is directed to the top of the incline. If the body were to slide down the incline, the frictional force would oppose that motion.• Newton’s 2nd law gives the acceleration down the incline:
Rolling Down a Ramp
acom
comF M a

M·g·sin – fs = M·acom
• Angular motion: Torque = I·; FN and Fg·sin pass thru the pivot at the center of mass
and do not produce a torque.fs applied perpendicularly a distance R at point P and
produces a torque. ; ; Substituting into the 2nd law equation:
The angular acceleration is related to the linear acceleration of the edge that contacts the incline by: acom = R·
s
If
R
sf R I sTorque F r f R
sin com
IM g M a
R
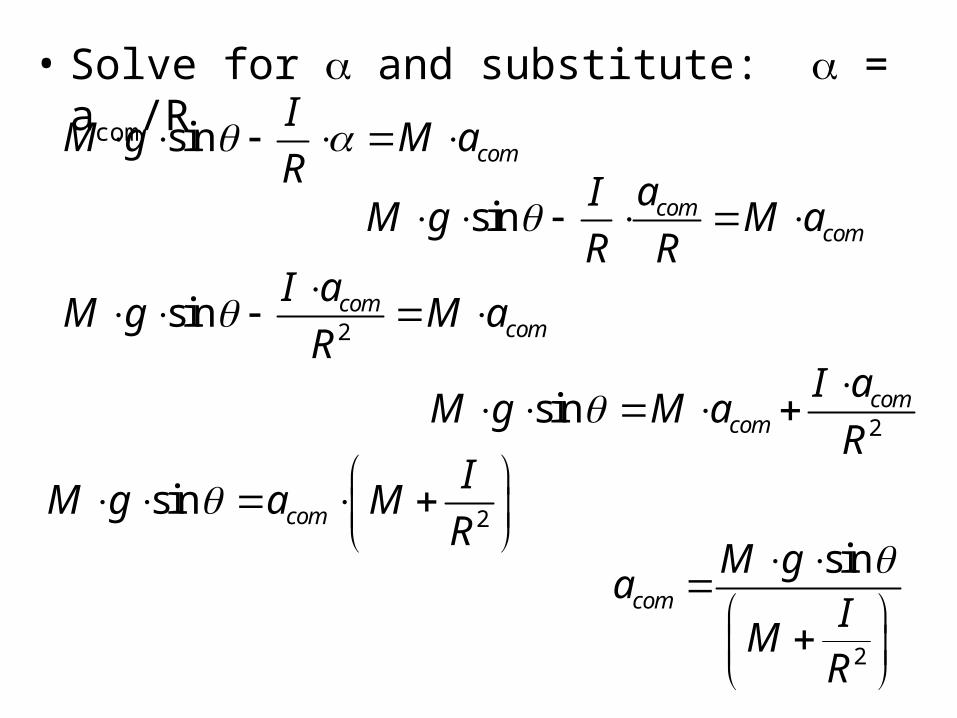
• Solve for and substitute: = acom/R
sin com
IM g M a
R
sin comcom
aIM g M a
R R
2sin com
com
I aM g M a
R
2sin com
com
I aM g M a
R
2sin com
IM g a M
R
2
sincom
M ga
IM
R
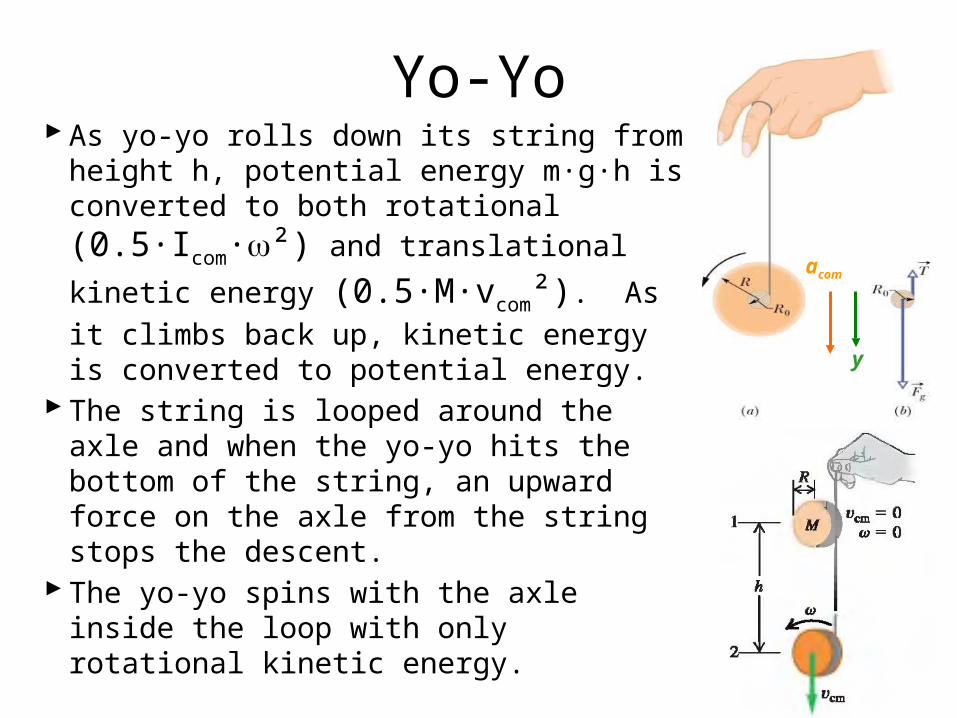
Yo-Yo As yo-yo rolls down its string from height h,
potential energy m·g·h is converted to both rotational (0.5·Icom·²) and translational kinetic
energy (0.5·M·vcom²). As it climbs back up, kinetic energy is converted to potential energy.
The string is looped around the axle and when the yo-yo hits the bottom of the string, an upward force on the axle from the string stops the descent.
The yo-yo spins with the axle inside the loop with only rotational kinetic energy.
y
acom
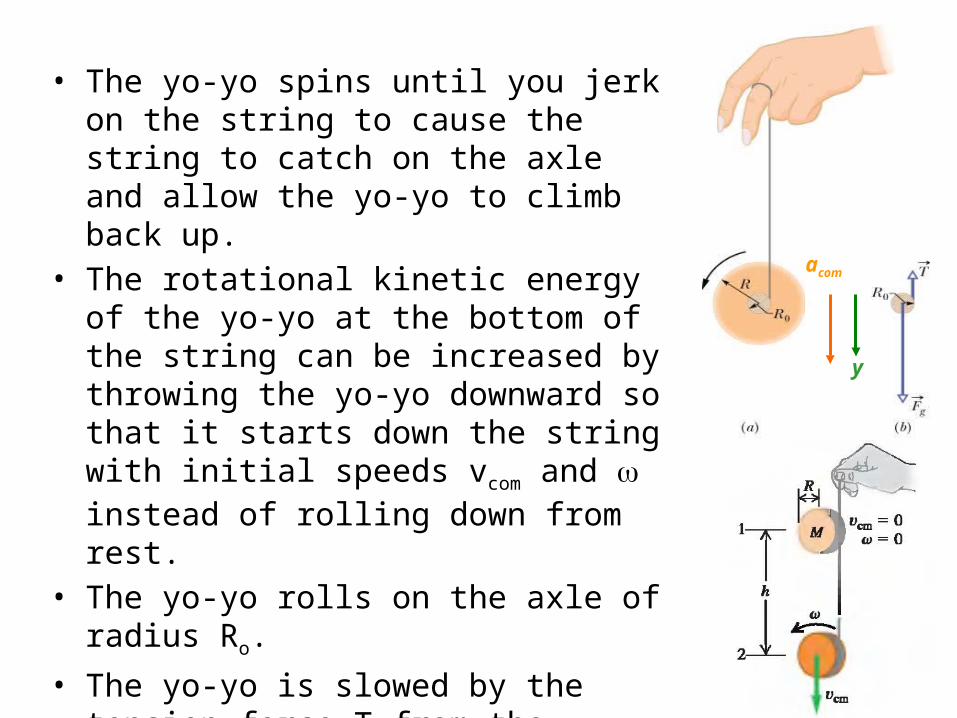
• The yo-yo spins until you jerk on the string to cause the string to catch on the axle and allow the yo-yo to climb back up.
• The rotational kinetic energy of the yo-yo at the bottom of the string can be increased by throwing the yo-yo downward so that it starts down the string with initial speeds vcom and instead of rolling down from rest.
• The yo-yo rolls on the axle of radius Ro.• The yo-yo is slowed by the tension force T
from the string on the axle.
y
acom
Acceleration equation: the yo-yo has the same downward acceleration
when it is climbing back up the string because the forces acting on it are still those shown in the figure.
Torque RevisitedWe previously defined torque for a rigid body that
rotated about a fixed axis in a circle. To define the torque for an individual particle that
moves along any path relative to a fixed point (rather than a fixed axis), the path doesn’t have to be a circle and the torque has to be written as a vector.
2com
com
RMI
1
ga
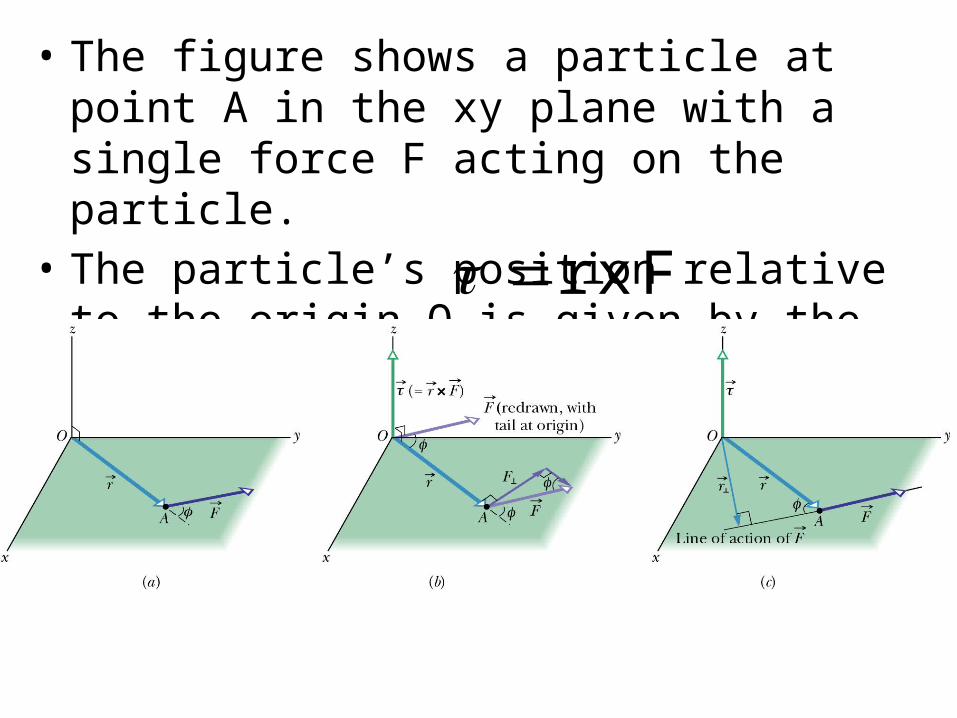
• The figure shows a particle at point A in the xy plane with a single force F acting on the particle.
• The particle’s position relative to the origin O is given by the position vector r.
• Torque equation: Fxr
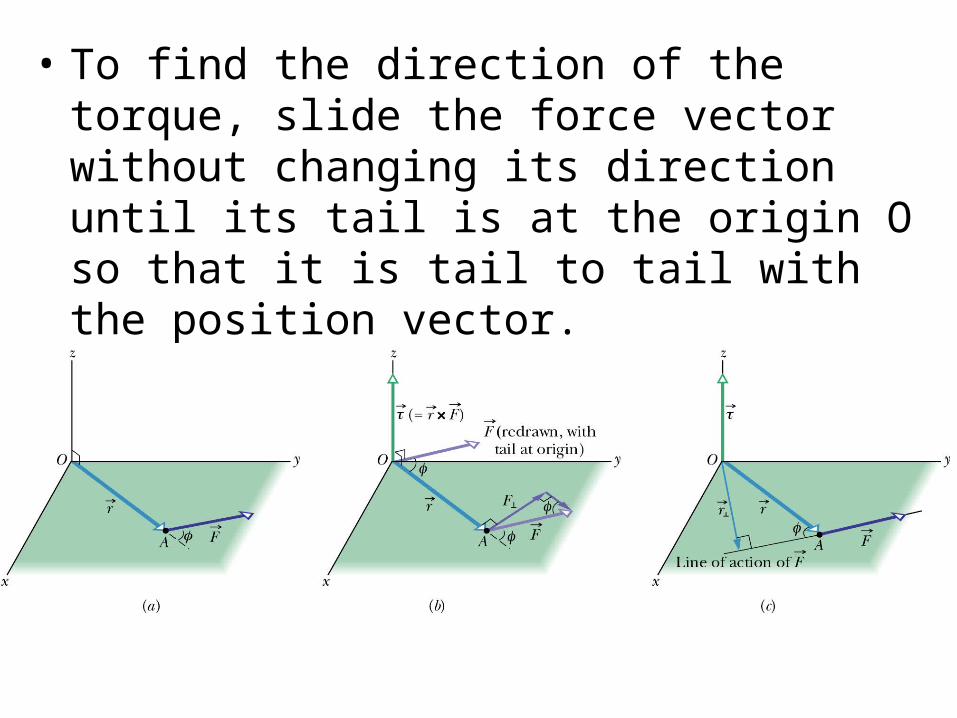
• To find the direction of the torque, slide the force vector without changing its direction until its tail is at the origin O so that it is tail to tail with the position vector.
• Use the right hand rule to rotate the position vector r into the force vector F. The thumb points in the direction of the torque.
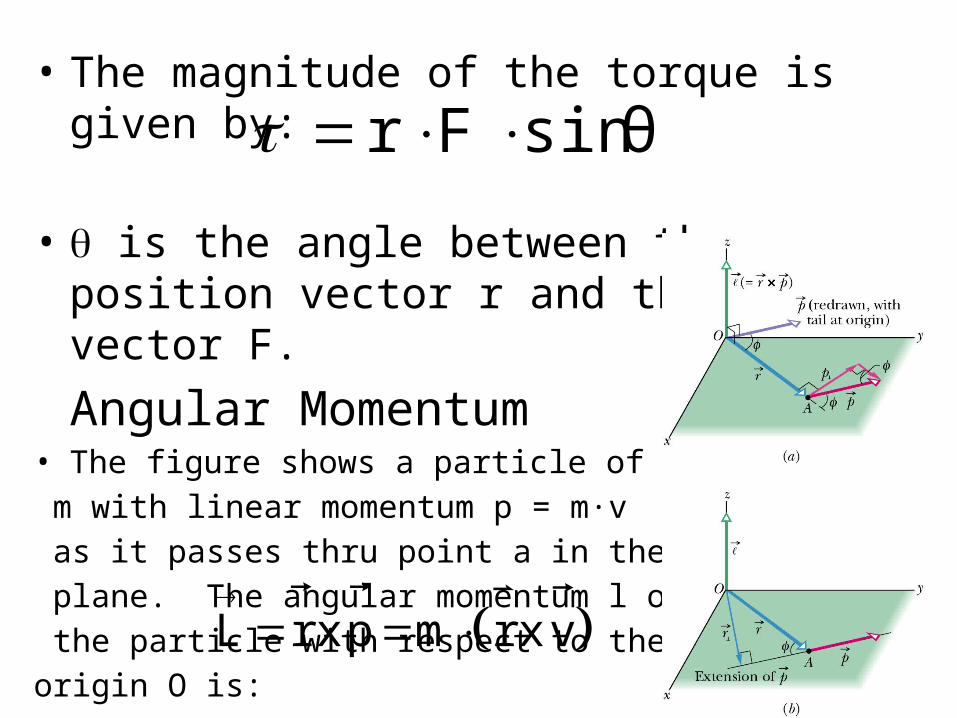
• The magnitude of the torque is given by:
• is the angle between the position vector r and the force vector F.
Angular Momentum• The figure shows a particle of mass m with linear momentum p = m·v as it passes thru point a in the xy plane. The angular momentum l of the particle with respect to theorigin O is:
sinθFr
L r x p m r x v
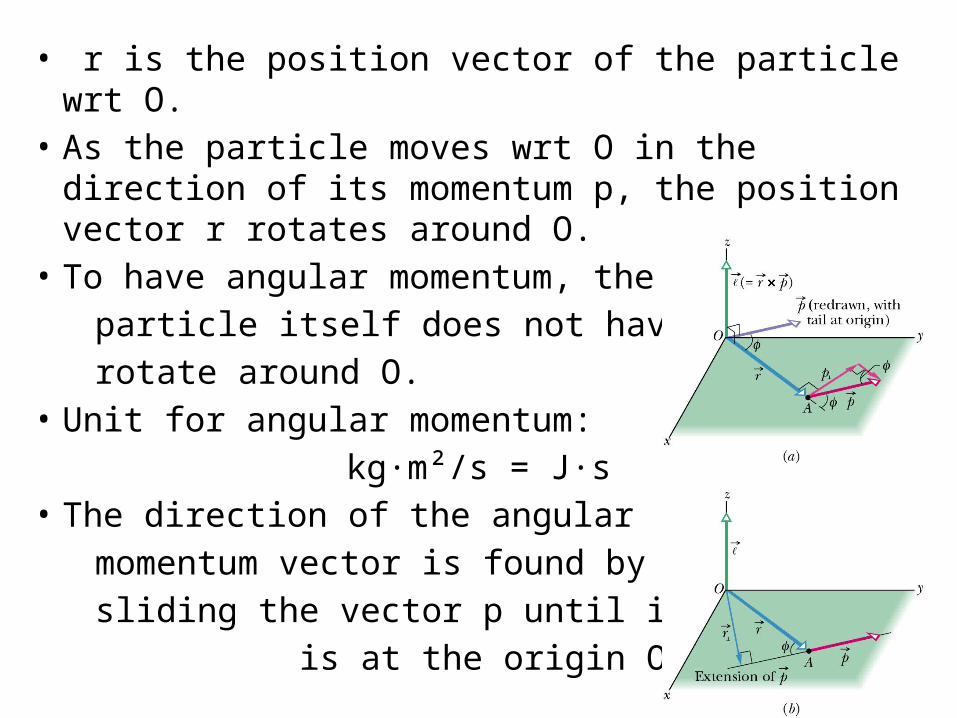
• r is the position vector of the particle wrt O.• As the particle moves wrt O in the direction of its
momentum p, the position vector r rotates around O.• To have angular momentum, the particle itself does not have to rotate around O.• Unit for angular momentum:
kg·m²/s = J·s• The direction of the angular momentum vector is found by sliding the vector p until its tail is at the origin O.
• Use the right-hand rule, rotating the vector r into vector p. The thumb points in the direction of the angular momentum vector.
• The magnitude of the angular momentum vector is: L = r·m·v·sin , where is the angle between r and p when the two vectors are tail to tail.
• Angular momentum only has meaning wrt a specific origin.
• The direction of the angular momentum vector is always perpendicular to the plane formed by the position vector and the linear momentum vector.
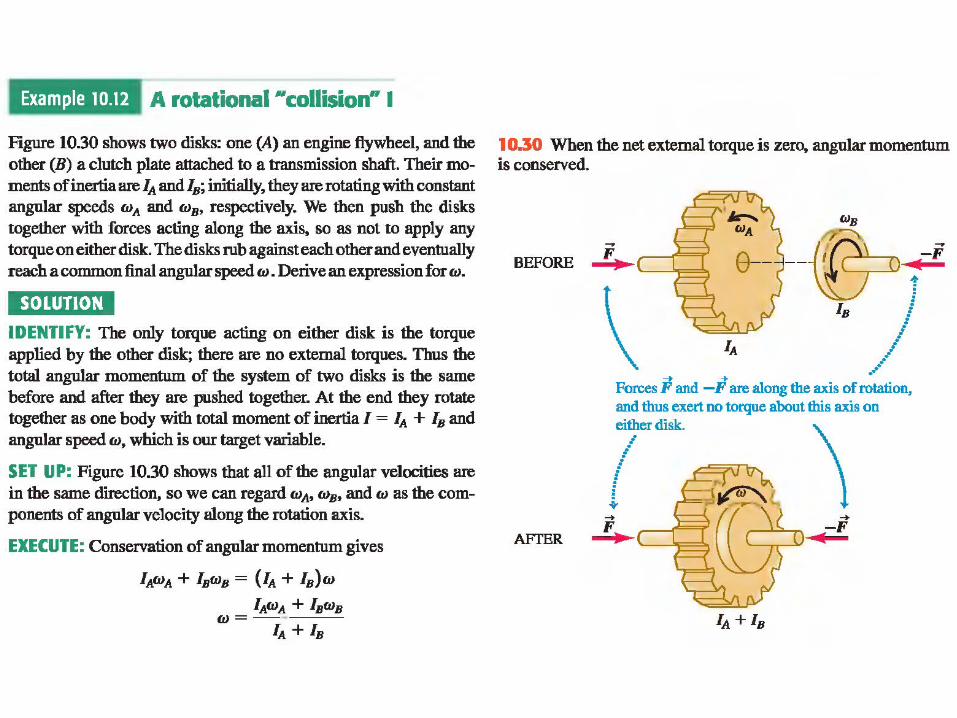
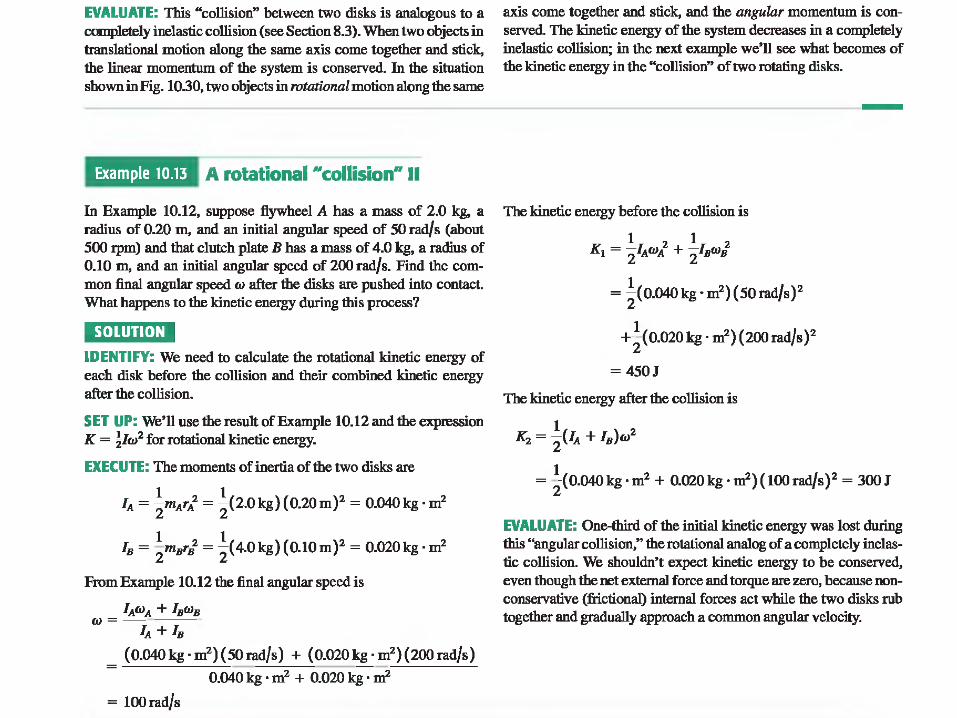
• If the net external torque acting on a system is zero, the angular momentum L of the system remains constant, no matter what changes take place within the system: Li = Lf ; Ii·i = If·f
• Because momentum is a vector quantity , the conservation of momentum has to be considered in all three dimensions (x, y, z). Depending on the torques acting on a system, the angular momentum of the system might be conserved in only 1 or 2 directions but not in all directions.
Conservation of Angular Momentum
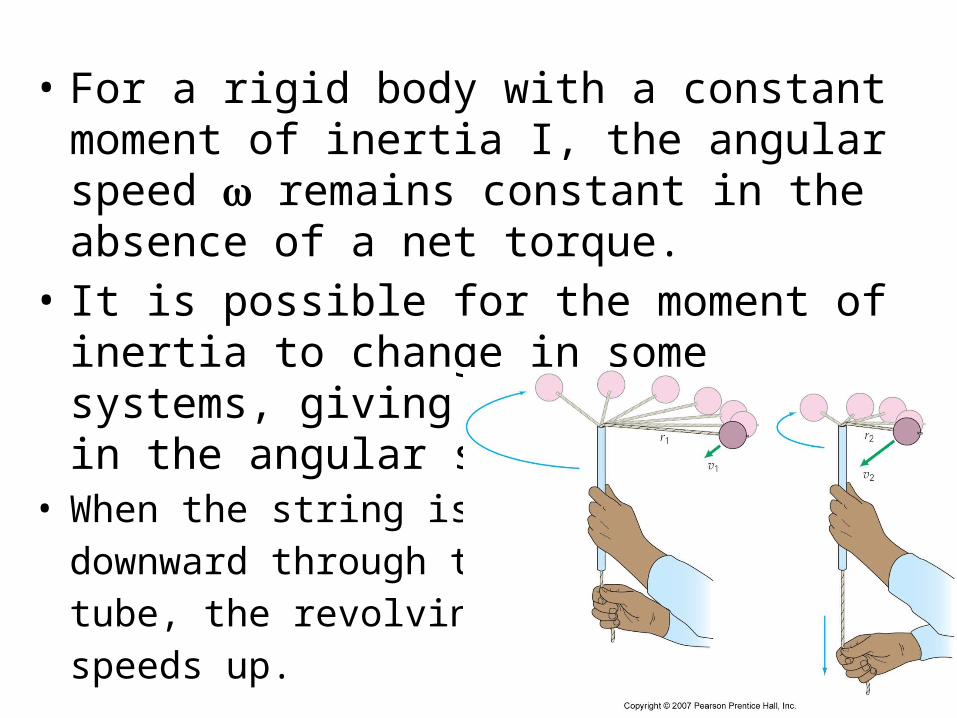
• For a rigid body with a constant moment of inertia I, the angular speed remains constant in the absence of a net torque.
• It is possible for the moment of inertia to change in some systems, giving rise to a change in the angular speed.
• When the string is pulleddownward through the tube, the revolving ballspeeds up.
• Conservation of angular momentum explains Kepler’s law of equal areas.– A planet’s angular momentum is conserved if we neglect the
weak gravitational torques from other planets.– When a planet is closer to the Sun in its elliptical orbit, the
moment arm is shorter, therefore, its speed is greater by the conservation of angular momentum.
• Conservation of angular momentum explains the large wind speeds of tornadoes and hurricanes.– As air rushes in toward the center of the storm where the
pressure is low, its rotational speed must increase for angular momentum to be conserved.
– Angular momentum L constant, as rotational inertia I becomes smaller as radius r decreases, angular velocity increases.
i
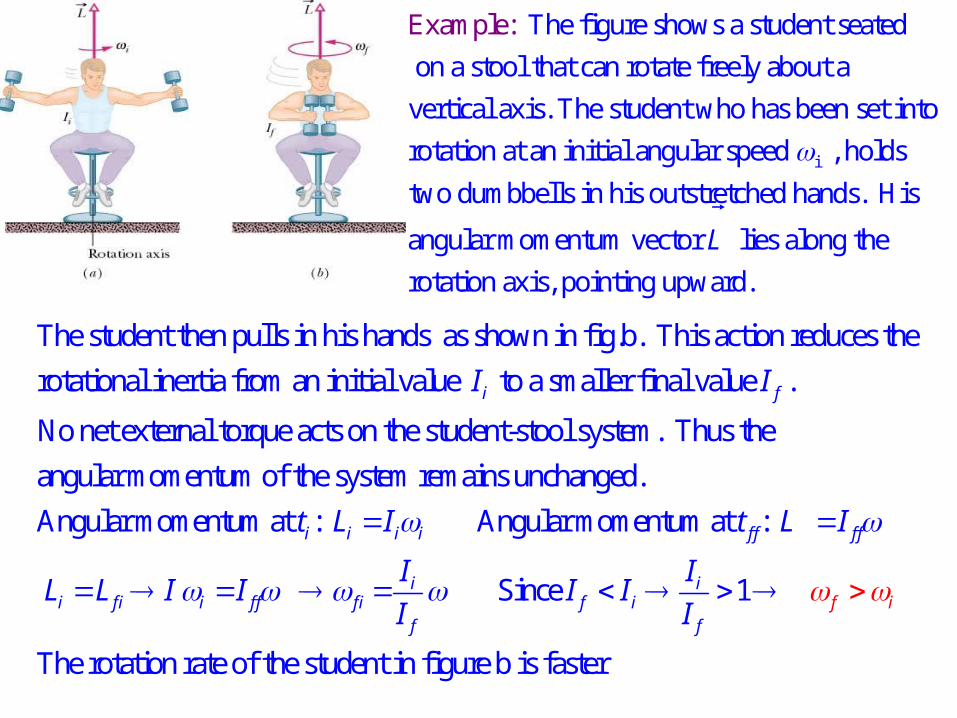
The figure shows a student seated
on a stool that can rotate freely about a
vertical axis. The student who has been set into
rotation at an initial angular speed , holds
two dumbb
Example:
ells
in h
is outstretched hands. His
angular momentum vector lies along the
rotation axis, pointing upward.
L
The student then pulls in his hands as shown in fig.b. This action reduces the
rotational inertia from an initial value to a smaller final value .
No net external torque acts on the student-st
i fI I
ool system. Thus the
angular momentum of the system remains unchanged.
Angular momentum at : Angular momentum at :
Since 1
i i i i f f f f
i ii f i i f f f i f
ffi
f
t L I t L I
I IL L I I I I
I I
The rotation rate of the student in figure b is faster
i

• Angular momentum L is a vector and when it is conserved or constant, its magnitude and direction must remain unchanged.–When no external torques act, the direction of L is fixed in space.– This is the principle behind passing a football
accurately and providing directional stability for bullets fired from guns.– The spiraling rotation stabilizes the spin axis in
the direction of motion.

Angular Momentum and Helicopters• the motor supplying the torque to rotate the
front rotor is internal and angular momentum must be conserved.– Initially, L = 0; to conserve the total angular
momentum of the rotor-body system, the angular momentum of the rotor and the helicopter body would have to be in opposite directions to cancel.
– On takeoff, the rotor would rotate one way and the helicopter body would rotate in the opposite direction.
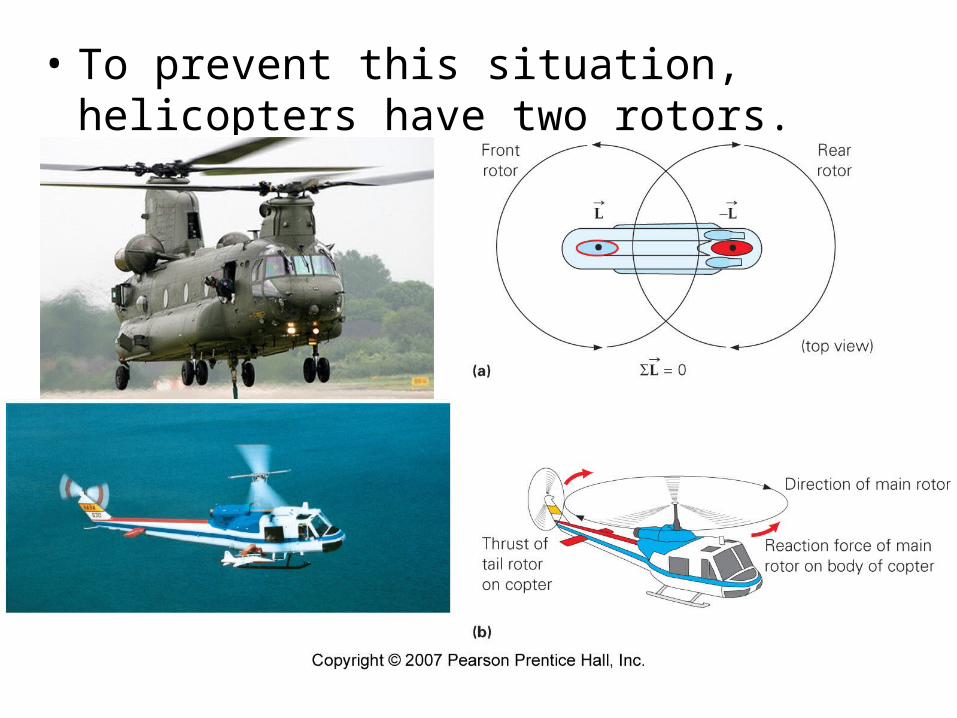
• To prevent this situation, helicopters have two rotors.
– Large helicopters have two overlapping rotors.• The oppositely rotating rotors cancel each other’s angular
momenta so the helicopter body does not have to rotate to provide cancellation of the rotor’s angular momentum.• The two rotors are offset at different heights so they do
not collide with each other.
– Small helicopters with a single overhead rotor have small “antitorque” tail rotors.• The tail rotor produces a thrust like a propeller and
supplies the torque to counterbalance the torque produced by the overhead rotor.• The tail rotor also helps steer the helicopter. Increasing or
decreasing the tail rotor’s thrust causes the helicopter to rotate one way or the other.