antologia control analogico
DESCRIPTION
En esta antologia explicamos diferentes conceptos sobre el control analogicoTRANSCRIPT
1. Esquemas de control de procesos1.1 Sistemas De Control
Un sistema de control es un conjunto de dispositivos encargados de administrar, ordenar, dirigir o regular el comportamiento de otro sistema, con el fin de reducir las probabilidades de fallo y obtener los resultados deseados. Por lo general, se usan sistemas de control industrial en procesos de producción industriales para controlar equipos o máquinas.Existen dos clases comunes de sistemas de control, sistemas de lazo abierto y sistemas de lazo cerrado.Sistema, es un proceso en el cual las señales de entrada son transformadas por el sistemas o provocan que este responda de alguna manera.En el sentido más amplio los sistemas físicos, son una interconexión de componentes, dispositivos o subsistemas.Existen dos clases comunes de sistemas de control, sistemas de lazo abierto y sistemas de lazo cerrado. En los sistemas de control de lazo abierto la salida se genera dependiendo de la entrada; mientras que en los sistemas de lazo cerrado la salida depende de las consideraciones y correcciones realizadas por la retroalimentación. Un sistema de lazo cerrado es llamado también sistema de control con realimentación. Los sistemas de control más modernos en ingeniería automatizan procesos en base a muchos parámetros y reciben el nombre de controladores de automatización programables (PAC).
Sistema de control de lazo abierto
Es aquel sistema en que solo actúa el proceso sobre la señal de entrada y da como resultado una señal de salida independiente a la señal de entrada, pero basada en la primera. Esto significa que no hay retroalimentación hacia el controlador para que éste pueda ajustar la acción de control. Es decir, la señal de salida no se convierte en señal de entrada para el controlador. Estos sistemas se caracterizan por:
Ser sencillos y de fácil concepto. Nada asegura su estabilidad ante una perturbación. La salida no se compara con la entrada. Ser afectado por las perturbaciones. Éstas pueden ser tangibles o
intangibles. La precisión depende de la previa calibración del sistema.
Sistema de control de lazo cerrado
Son los sistemas en los que la acción de control está en función de la señal de salida. Los sistemas de circuito cerrado usan la retroalimentación desde un resultado final para ajustar la acción de control en consecuencia. El control en lazo cerrado es imprescindible cuando se da alguna de las siguientes circunstancias:
Cuando un proceso no es posible de regular por el hombre. Una producción a gran escala que exige grandes instalaciones y el
hombre no es capaz de manejar. Vigilar un proceso es especialmente difícil en algunos casos y
requiere una atención que el hombre puede perder fácilmente por cansancio o despiste, con los consiguientes riesgos que ello pueda ocasionar al trabajador y al proceso.
Sus características son: Ser complejos, pero amplios en cantidad de parámetros. La salida se compara con la entrada y le afecta para el control del
sistema. Su propiedad de retroalimentación. Ser más estable a perturbaciones y variaciones internas.
Características
1. Señal de Corriente de Entrada: Considerada como estímulo aplicado a un sistema desde una fuente de energía externa con el propósito de que el sistema produzca una respuesta específica.
2. Señal de Corriente de Salida: Respuesta obtenida por el sistema que puede o no relacionarse con la respuesta que implicaba la entrada.
3. Variable Manipulada: Es el elemento al cual se le modifica su magnitud, para lograr la respuesta deseada. Es decir, se manipula la entrada del proceso.
4. Variable Controlada: Es el elemento que se desea controlar. Se puede decir que es la salida del proceso.
5. Conversión: Mediante receptores se generan las variaciones o cambios que se producen en la variable.
6. Variaciones Externas: Son los factores que influyen en la acción de producir un cambio de orden correctivo.
7. Fuente de Energía: Es la que entrega la energía necesaria para generar cualquier tipo de actividad dentro del sistema.
8. Retroalimentación: La retroalimentación es una característica importante de los sistemas de control de lazo cerrado. Es una relación secuencial de causas y efectos entre las variables de estado. Dependiendo de la acción correctiva que tome el sistema, este puede apoyar o no una decisión, cuando en el sistema se produce un retorno se dice que hay una retroalimentación negativa; si el sistema apoya la decisión inicial se dice que hay una retroalimentación positiva.
9. Variables de fase: Son las variables que resultan de la transformación del sistema original a la forma canónica controlable.
1.2 La transformada de Laplace y funciones de transferencia
Una función de transferencia es un modelo matemático que a través de un cociente relaciona la respuesta de un sistema (modelada) con una señal de entrada o excitación (también modelada). En la teoría de control, a menudo se usan las funciones de transferencia para caracterizar las relaciones de entrada y salida de componentes o de sistemas que se describen mediante ecuaciones diferenciales lineales e invariantes en el tiempo.
Uno de los primeros matemáticos en describir estos modelos fue Laplace, a través de su transformación matemática.Por definición una función de transferencia se puede determinar según la expresión:
donde H (s) es la función de transferencia (también notada como G (s) ); Y (s) es la transformada de Laplace de la respuesta y X (s) es la transformada de Laplace de la señal de entrada.La función de transferencia también puede considerarse como la respuesta de un sistema inicialmente inerte a un impulso como señal de entrada:
La salida o respuesta en frecuencia del sistema se halla entonces de
y la respuesta como función del tiempo se halla con la transformada de Laplace inversa de Y(s):
Cualquier sistema físico (mecánico, eléctrico, etc.) se puede traducir a una serie de valores matemáticos a través de los cuales se conoce el comportamiento de estos sistemas frente a valores concretos.
1.3 Diagramas y álgebra de bloques
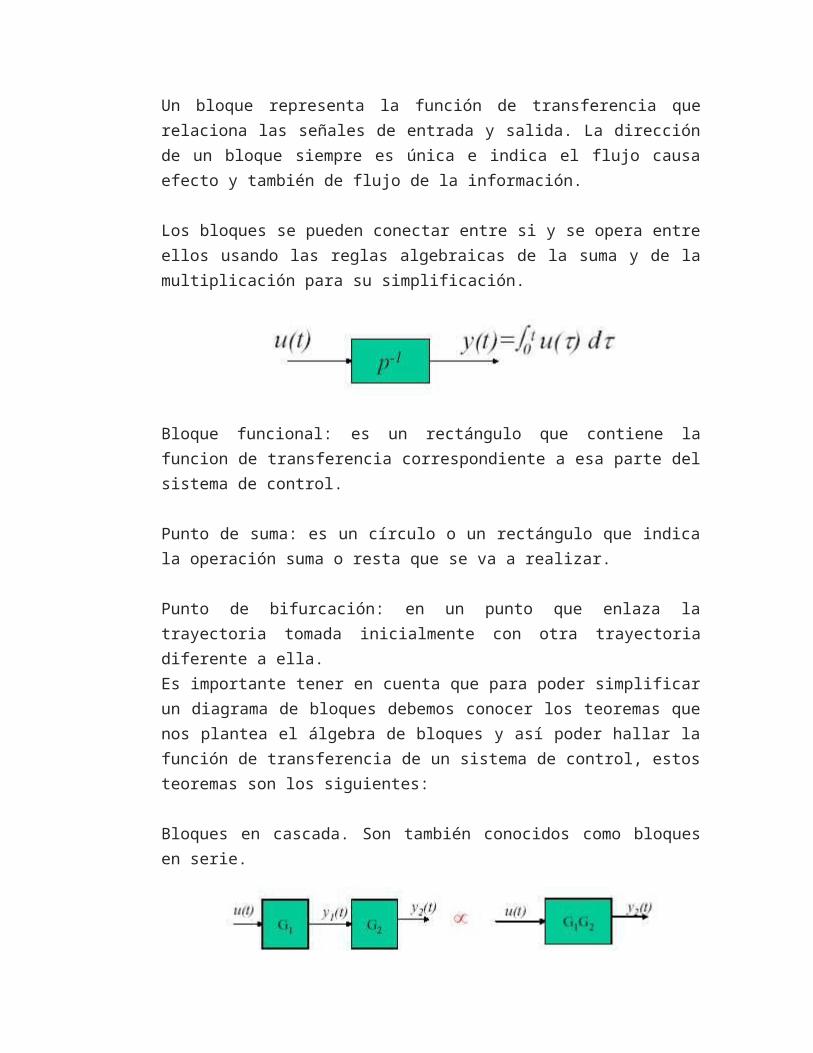
Un bloque representa la función de transferencia que relaciona las señales de entrada y salida. La dirección de un bloque siempre es única e indica el flujo causa efecto y también de flujo de la información.
Los bloques se pueden conectar entre si y se opera entre ellos usando las reglas algebraicas de la suma y de la multiplicación para su simplificación.
Bloque funcional: es un rectángulo que contiene la funcion de transferencia correspondiente a esa parte del sistema de control.
Punto de suma: es un círculo o un rectángulo que indica la operación suma o resta que se va a realizar.
Punto de bifurcación: en un punto que enlaza la trayectoria tomada inicialmente con otra trayectoria diferente a ella.Es importante tener en cuenta que para poder simplificar un diagrama de bloques debemos conocer los teoremas que nos plantea el álgebra de bloques y así poder hallar la función de transferencia de un sistema de control, estos teoremas son los siguientes:
Bloques en cascada. Son también conocidos como bloques en serie.
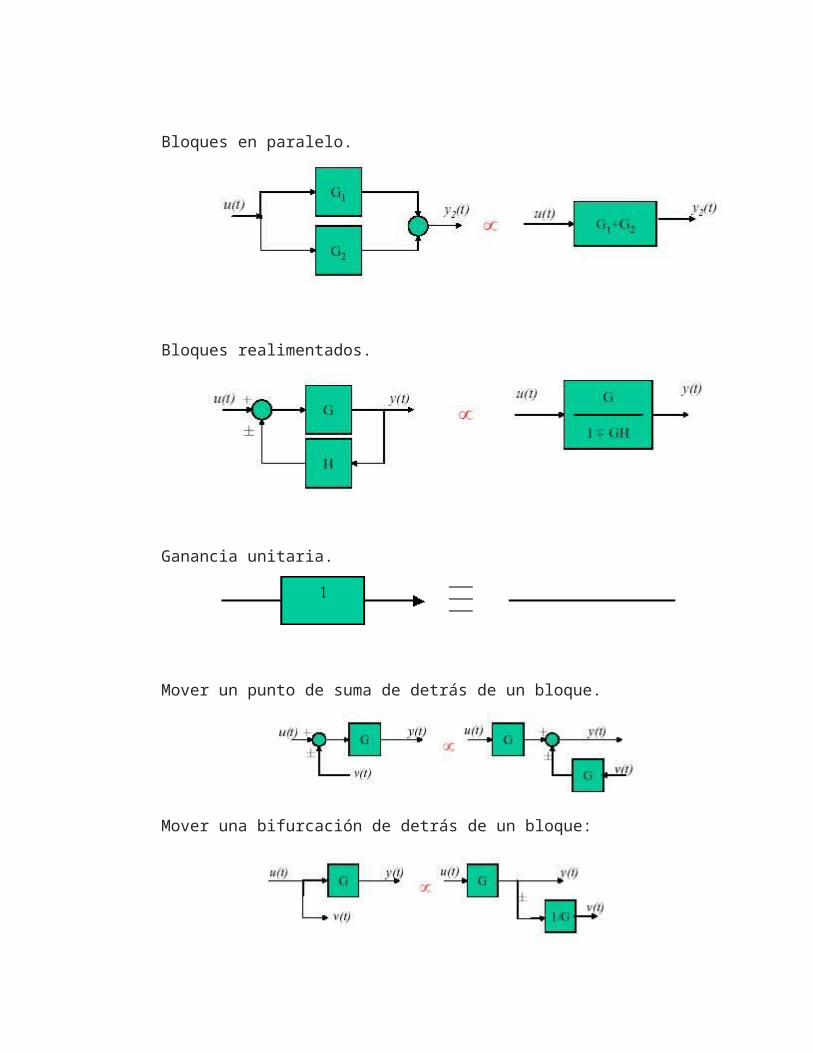
Bloques en paralelo.

Bloques realimentados.
Ganancia unitaria.
Mover un punto de suma de detrás de un bloque.
Mover una bifurcación de detrás de un bloque:
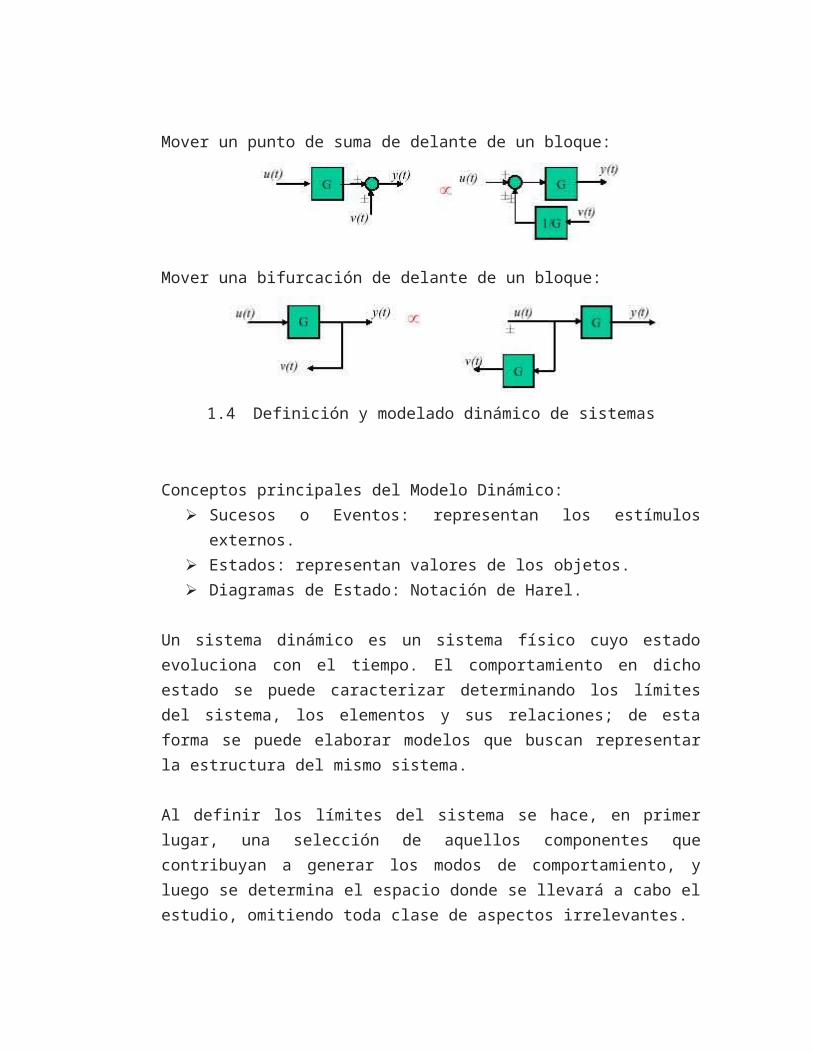
Mover un punto de suma de delante de un bloque:
Mover una bifurcación de delante de un bloque:
1.4 Definición y modelado dinámico de sistemas
Conceptos principales del Modelo Dinámico: Sucesos o Eventos: representan los estímulos externos. Estados: representan valores de los objetos. Diagramas de Estado: Notación de Harel.
Un sistema dinámico es un sistema físico cuyo estado evoluciona con el tiempo. El comportamiento en dicho estado se puede caracterizar determinando los límites del sistema, los elementos y sus relaciones; de esta forma se puede elaborar modelos que buscan representar la estructura del mismo sistema.
Al definir los límites del sistema se hace, en primer lugar, una selección de aquellos componentes que contribuyan a generar los modos de comportamiento, y luego se determina el espacio donde se llevará a cabo el estudio, omitiendo toda clase de aspectos irrelevantes.
En cuanto a la elaboración de los modelos, los elementos y sus relaciones, se debe tener en cuenta:
Un sistema está formado por un conjunto de elementos en interacción.
El comportamiento del sistema se puede mostrar a través de diagramas causales.
Hay varios tipos de variables: variables exógenas (son aquellas que afectan al sistema sin que éste las provoque) y las variables endógenas (afectan al sistema pero éste sí las provoca).
Un sistema dinámico se dice discreto si el tiempo se mide en pequeños lapsos; éstos son modelados como relaciones recursivas, tal como la ecuación logística:
donde t denota los pasos discretos del tiempo y x es la variable que cambia con éste.
Si el tiempo es medido en forma continua, el sistema dinámico continuo resultante es expresado como una ecuación diferencial ordinaria; por ejemplo:
donde x es la variable que cambia con el tiempo t. La variable cambiante x es normalmente un número real, aunque también puede ser un vector en Rk.
Sistemas lineales y no lineales
Se distingue entre sistemas dinámicos lineales y sistemas dinámicos no lineales. En los sistemas lineales, el segundo miembro de la ecuación es una expresión que depende en forma lineal de x, tal como:
Si se conocen dos soluciones para un sistema lineal, la suma de ellas es también una solución; esto se conoce como principio de superposición. En general, las soluciones provenientes de un espacio vectorial permiten el uso del álgebra lineal y simplifican significativamente el análisis. Para sistemas lineales continuos, el método de la transformada de Laplace también puede ser usado para transformar la ecuación diferencial en una ecuación algebraica; así mismo que para los sistemas lineales discretos, el método de la transformada Z también puede ser usado para transformar la ecuación diferencial en una ecuación algebraica.
1.5 Respuestas y parámetros típicos de sistemas de primer y segundo orden.
Supóngase un sistema continuo de primer orden, cuya función de transferencia sea
Al estimular el sistema con un paso unitario , con condiciones iniciales
nulas, la respuesta puede calcularse como sigue:
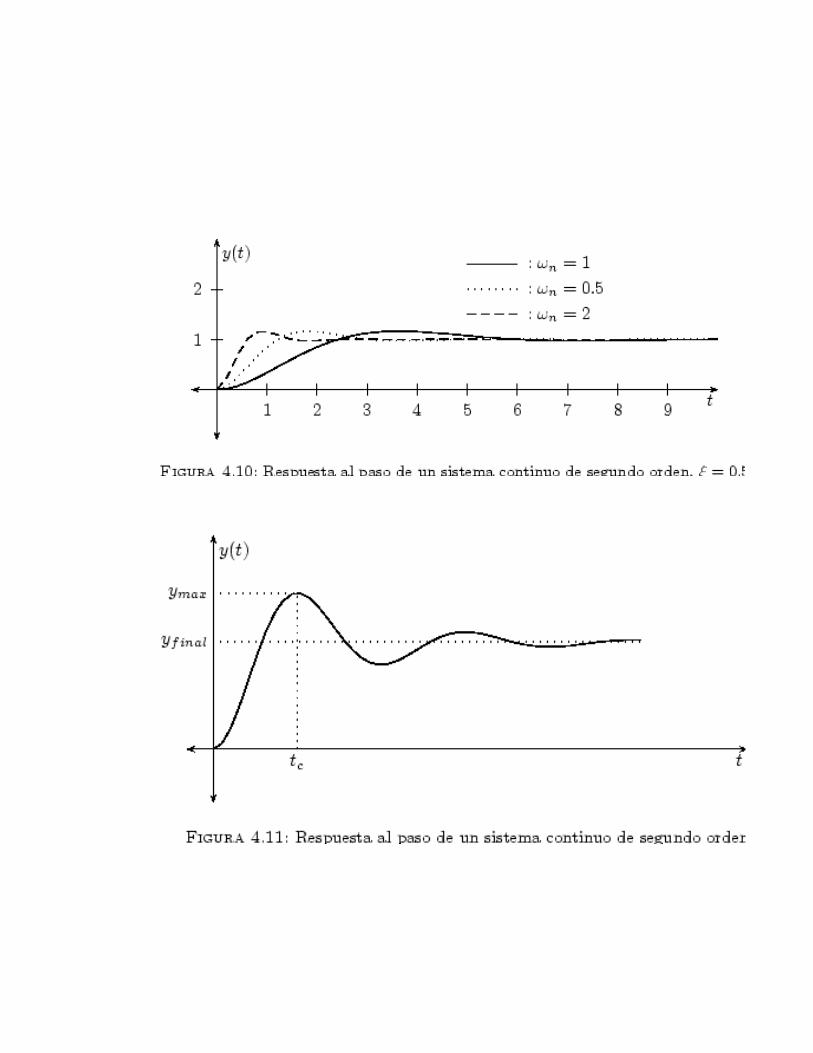
Muestra las gráficas de para distintos valores de :
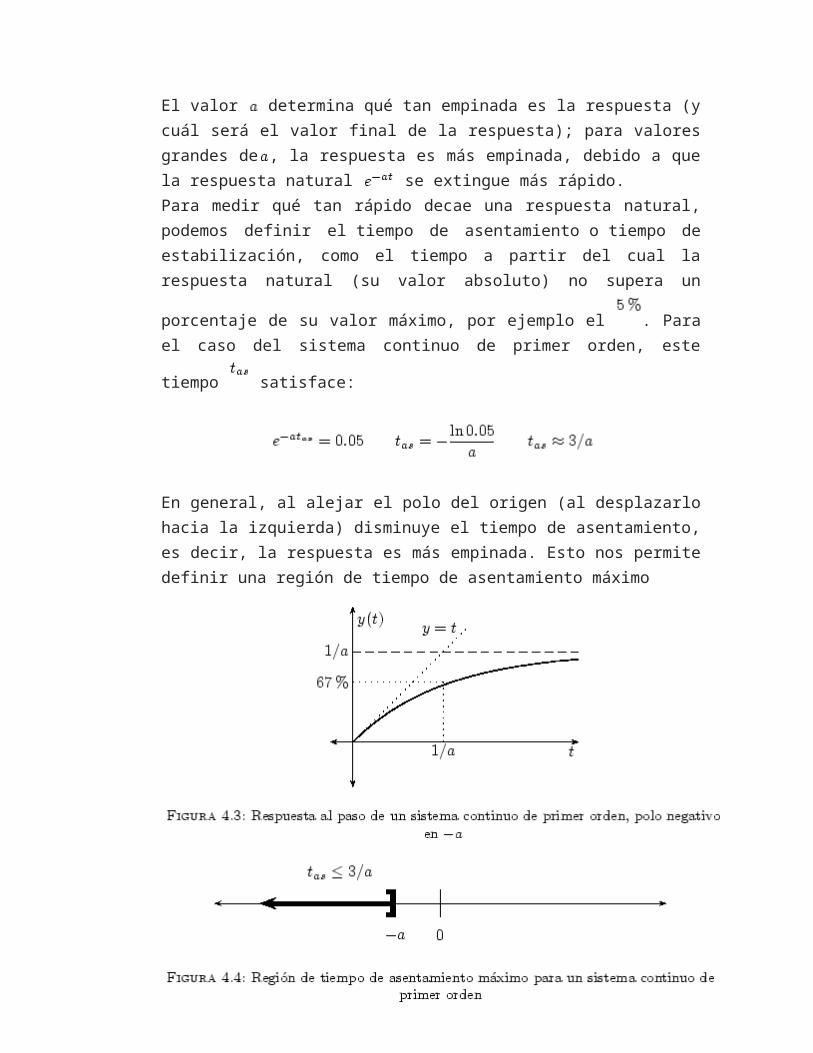
El valor determina qué tan empinada es la respuesta (y cuál será el valor final de la respuesta); para valores grandes de , la respuesta es más empinada, debido a que la respuesta natural se extingue más rápido.Para medir qué tan rápido decae una respuesta natural, podemos definir el tiempo de asentamiento o tiempo de estabilización, como el tiempo a partir del cual la respuesta natural (su valor absoluto) no supera un
porcentaje de su valor máximo, por ejemplo el . Para el caso del
sistema continuo de primer orden, este tiempo satisface:
En general, al alejar el polo del origen (al desplazarlo hacia la izquierda) disminuye el tiempo de asentamiento, es decir, la respuesta es más empinada. Esto nos permite definir una región de tiempo de asentamiento máximo
Nótese que la región de tiempo de asentamiento máximo está contenida dentro de la región de estabilidad; esto es lógico, ya que la definición de tiempo de asentamiento sólo tiene sentido para sistemas estables.
Supóngase un sistema discreto de primer orden, cuya función de transferencia sea
Al estimular el sistema con un paso unitario , con condiciones iniciales
nulas, la respuesta puede calcularse como sigue:
Muestra las gráficas de para distintos valores de .

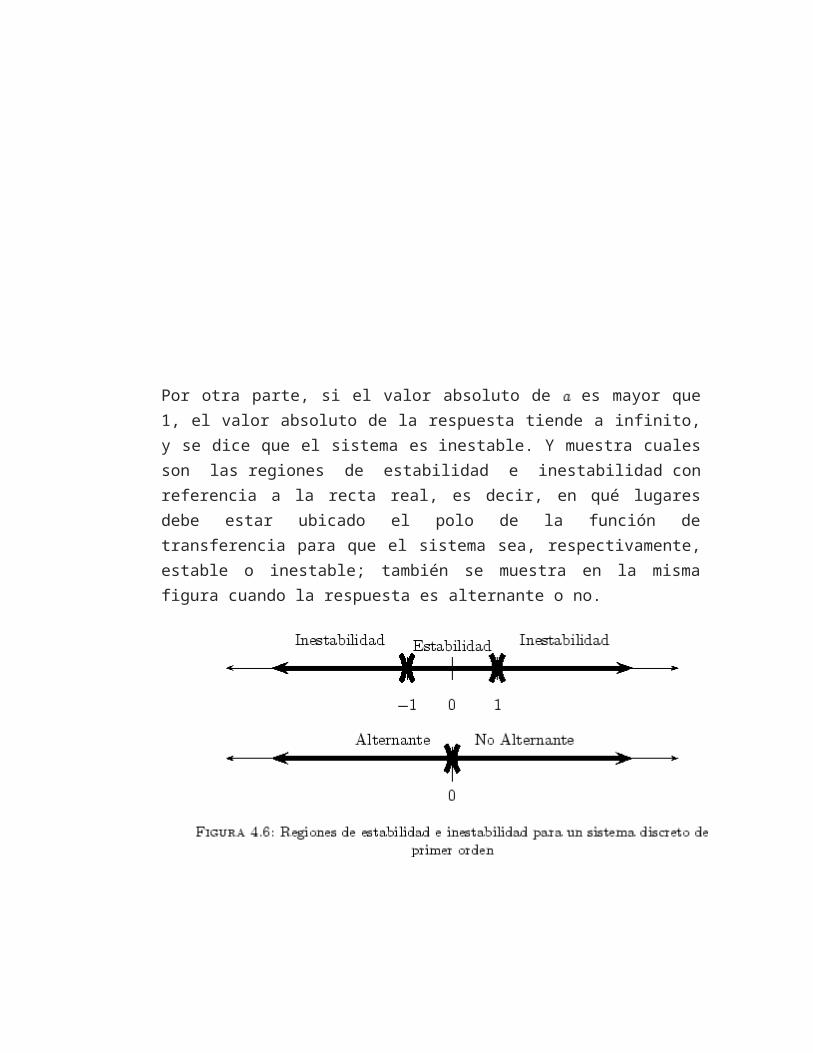
Por otra parte, si el valor absoluto de es mayor que 1, el valor absoluto de la respuesta tiende a infinito, y se dice que el sistema es inestable. Y muestra cuales son las regiones de estabilidad e inestabilidad con referencia a la recta real, es decir, en qué lugares debe estar ubicado el polo de la función de transferencia para que el sistema sea, respectivamente, estable o inestable; también se muestra en la misma figura cuando la respuesta es alternante o no.
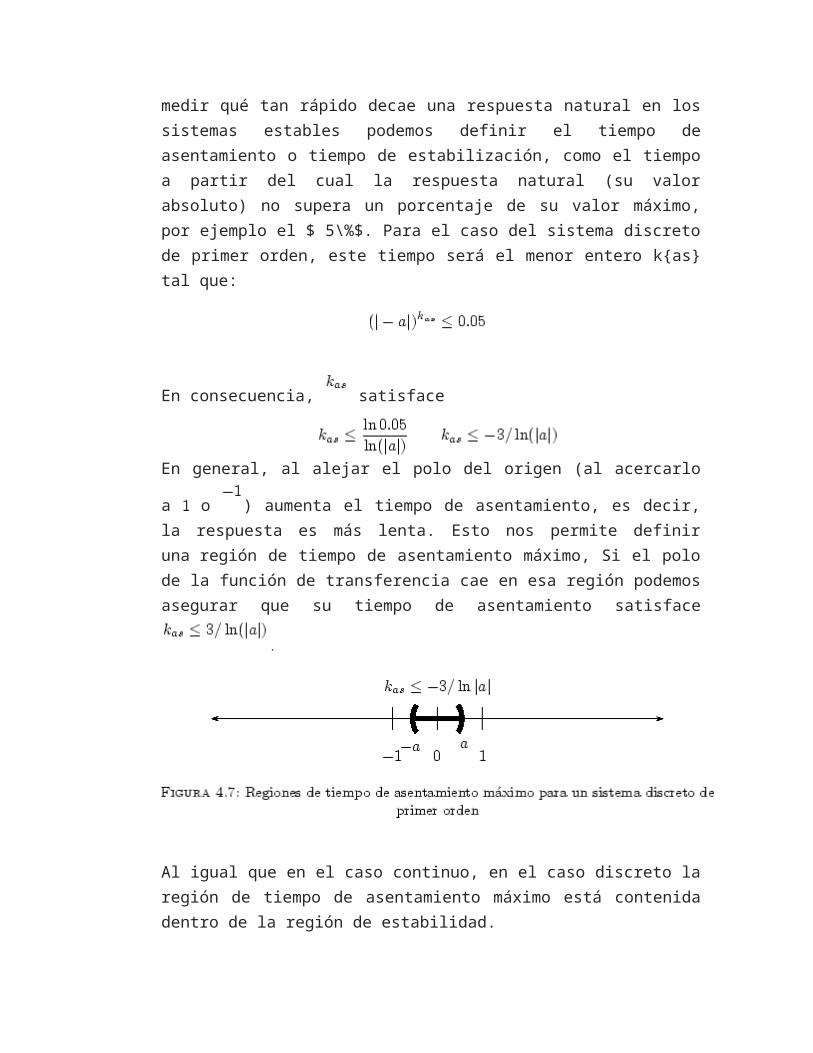
medir qué tan rápido decae una respuesta natural en los sistemas estables podemos definir el tiempo de asentamiento o tiempo de estabilización, como el tiempo a partir del cual la respuesta natural (su valor absoluto) no supera un porcentaje de su valor máximo, por ejemplo el $ 5\%$. Para el caso del sistema discreto de primer orden, este tiempo será el menor entero k{as} tal que:
En consecuencia, satisface
En general, al alejar el polo del origen (al acercarlo a o ) aumenta el tiempo de asentamiento, es decir, la respuesta es más lenta. Esto nos permite definir una región de tiempo de asentamiento máximo, Si el polo de la función de transferencia cae en esa región podemos asegurar que su
tiempo de asentamiento satisface .
Al igual que en el caso continuo, en el caso discreto la región de tiempo de asentamiento máximo está contenida dentro de la región de estabilidad.

Supóngase un sistema continuo de segundo orden, cuya función de transferencia sea
Los polos de la función de transferencia serán:
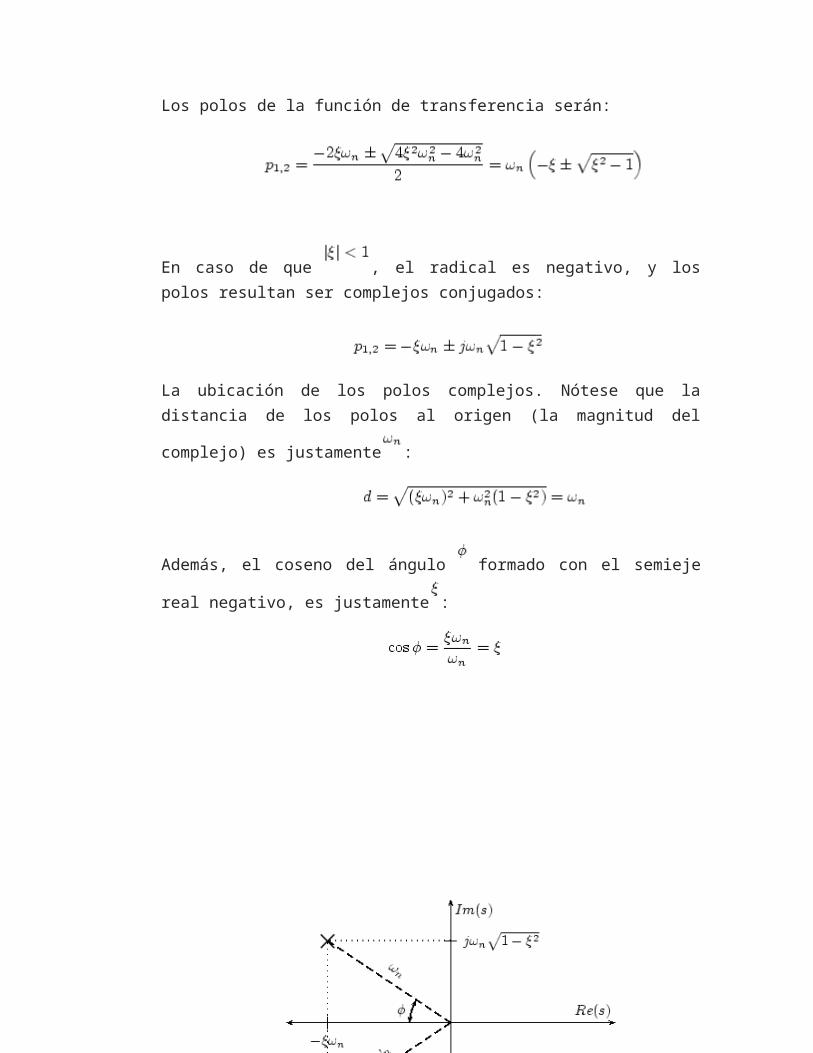
En caso de que , el radical es negativo, y los polos resultan ser complejos conjugados:
La ubicación de los polos complejos. Nótese que la distancia de los polos al
origen (la magnitud del complejo) es justamente :
Además, el coseno del ángulo formado con el semieje real negativo, es
justamente :
Al estimular el sistema con un paso unitario , con condiciones iniciales
nulas, la respuesta puede calcularse como sigue:
donde,
1.6 Criterios de Estabilidad
Criterios de Estabilidad: es el conjunto de normas que debe cumplir un buque para que su estabilidad alcance valores mínimos que garanticen su seguridad.Estos criterios pueden clasificarse según los parámetros que controlan en:
Criterios en función de la altura metacéntrica. Criterios en función de la estabilidad estática. Criterios en función de la estabilidad estática y dinámica. Criterios en función de la estabilidad estática y la acción del viento. Criterios en función del período y amplitud del balance.
Existen también diferentes criterios creados para distintos tipos y tamaños de embarcaciones, dado que es muy amplia la variedad de buques y muy difícil que un solo criterio puede ser aplicado de forma universal.
Criterio de Rahola
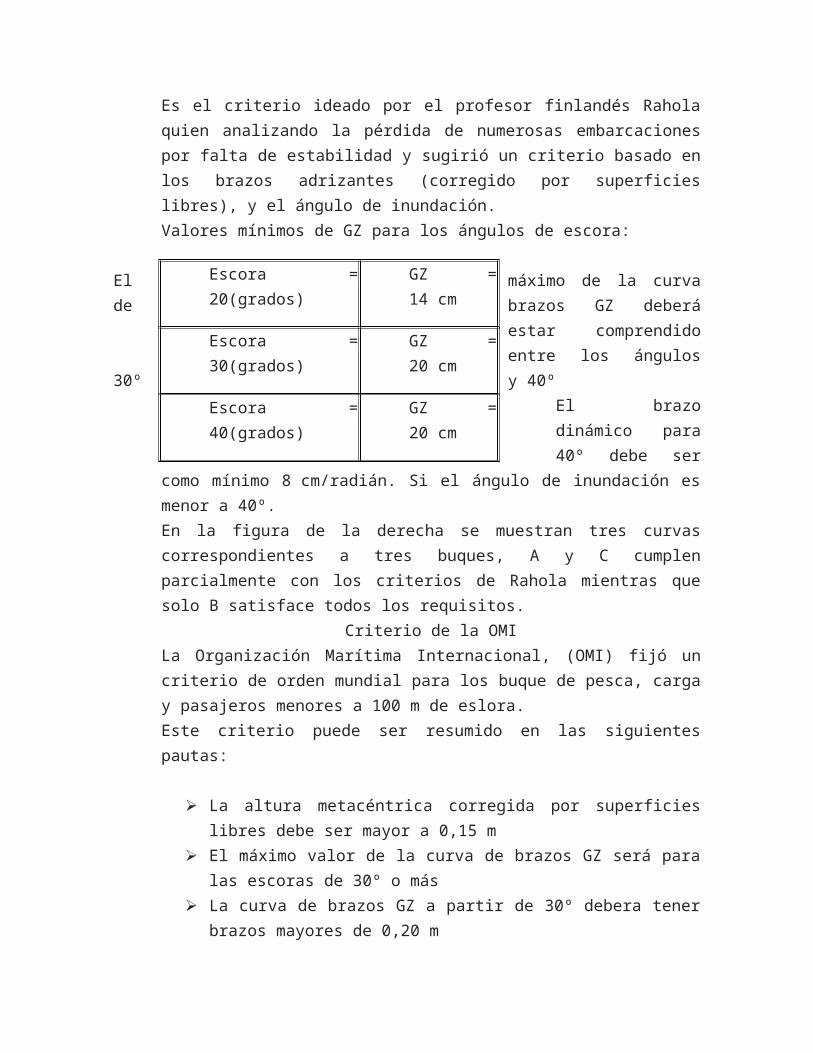
Es el criterio ideado por el profesor finlandés Rahola quien analizando la pérdida de numerosas embarcaciones por falta de estabilidad y sugirió un criterio basado en los brazos adrizantes (corregido por superficies libres), y el ángulo de inundación.Valores mínimos de GZ para los ángulos de escora:
El máximo de la curva de brazos GZ deberá estar comprendido entre los ángulos 30º y 40º
El brazo dinámico para 40º debe ser
como mínimo 8 cm/radián. Si el ángulo de inundación es menor a 40º.
Escora = 20(grados) GZ = 14 cm
Escora = 30(grados) GZ = 20 cm
Escora = 40(grados) GZ = 20 cm
En la figura de la derecha se muestran tres curvas correspondientes a tres buques, A y C cumplen parcialmente con los criterios de Rahola mientras que solo B satisface todos los requisitos.
Criterio de la OMILa Organización Marítima Internacional, (OMI) fijó un criterio de orden mundial para los buque de pesca, carga y pasajeros menores a 100 m de eslora.Este criterio puede ser resumido en las siguientes pautas:
La altura metacéntrica corregida por superficies libres debe ser mayor a 0,15 m
El máximo valor de la curva de brazos GZ será para las escoras de 30º o más
La curva de brazos GZ a partir de 30º debera tener brazos mayores de 0,20 m
El área encerrada por la curva de brazos GZ y la ordenada de 40º será igual o mayor a de 0,090 m*radián.
El área encerrada por la curva GZ y las ordenadas de 30º y 40º de escora y/o la ordenada correspondiente al ángulo de inundación (si fuera menor a 40º) deberá ser mayor de 0.030 m*radián.
El área encerrada por la curva de brazos GZ y la ordenada de la escora de 30º será igual o mayor a 0,055 m*radián.
La OMI fija además las forma en que debe corregirse la altura metacéntrica por la acción de superficies libres.
Criterio de Nickum para buques pesquerosEste criterio establece que un buque pesquero en servicio debe cumplir con:Primero:durante la condición más crítica de trabajo:
a) La altura metacéntrica GM debe ser igual o mayor que 0,1 de la manga o igual o mayor de 0,610 m
b) Debe cumplirse la relación: Donde:

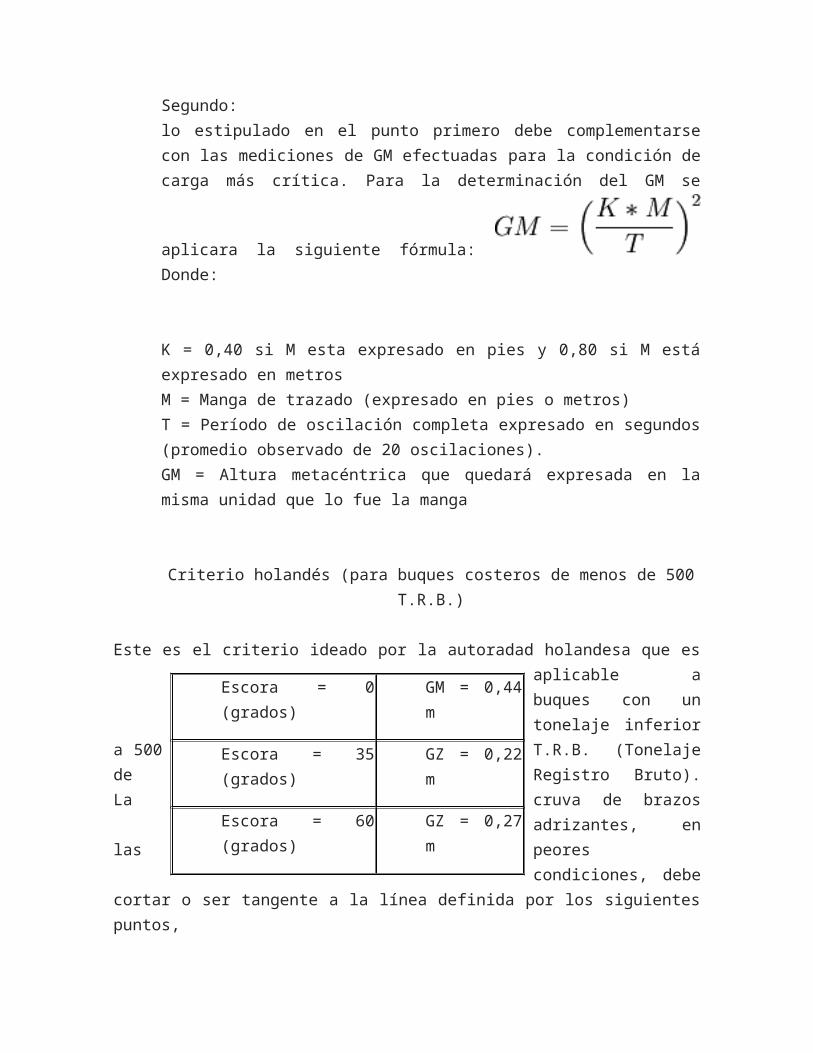
GM = Altura metacéntrica inicial.M = Manga de trazado.F = Francobordo.A = Area de la obra muerta proyectada sobre el plano diametral.E = Eslora entre perpendiculares.Segundo:lo estipulado en el punto primero debe complementarse con las mediciones de GM efectuadas para la condición de carga más crítica. Para la determinación del GM se aplicara la siguiente fórmula:
Donde:
K = 0,40 si M esta expresado en pies y 0,80 si M está expresado en metrosM = Manga de trazado (expresado en pies o metros)T = Período de oscilación completa expresado en segundos (promedio observado de 20 oscilaciones).GM = Altura metacéntrica que quedará expresada en la misma unidad que lo fue la manga
Criterio holandés (para buques costeros de menos de 500 T.R.B.)
Este es el criterio ideado por la autoradad holandesa que es aplicable a buques con un tonelaje inferior a 500 T.R.B. (Tonelaje de Registro Bruto). La cruva de brazos
adrizantes, en las peores condiciones, debe cortar o ser tangente a la línea definida por los siguientes puntos,Este es un criterio muy similar al de Rahola, de fácil interpretación.
Escora = 0 (grados) GM = 0,44 m
Escora = 35 (grados) GZ = 0,22 m
Escora = 60 (grados) GZ = 0,27 m
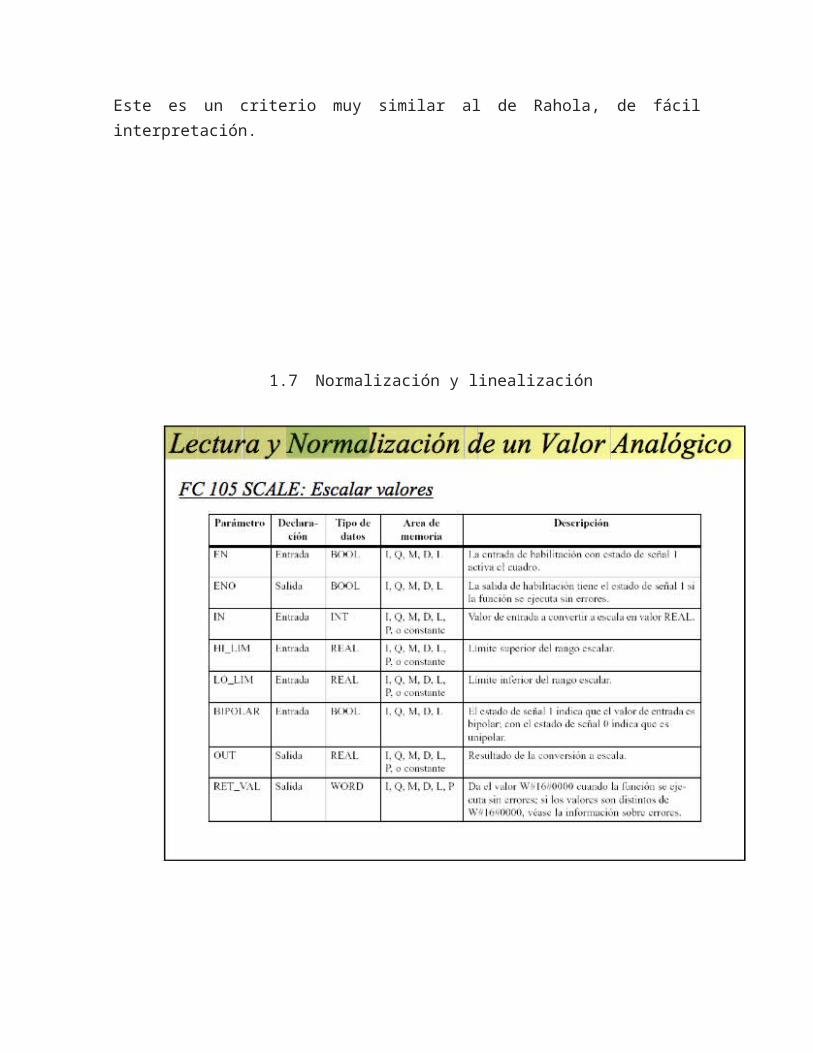
1.7 Normalización y linealización
Técnicas digitales de linealización:
Conversión AD no lineal LUT (look-up table) Linealización a trozos Cálculo o estimación de la función característica
1.8 Definición de sistemas en espacio de estados
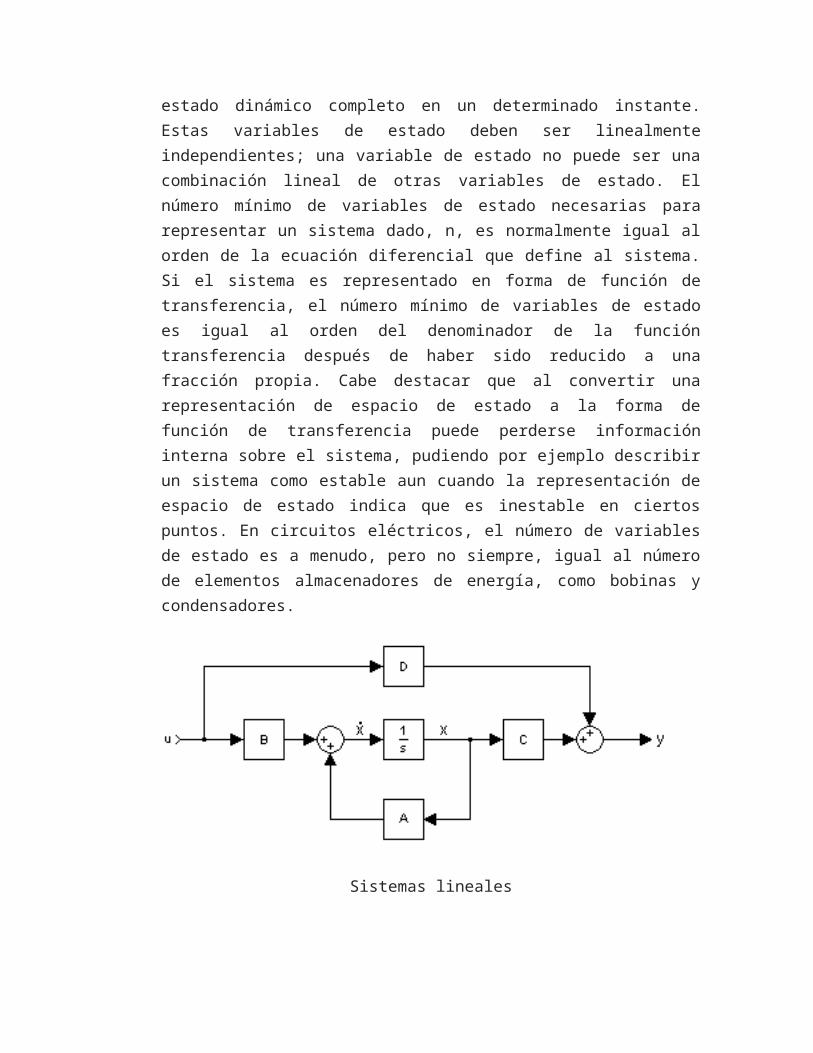
Una representación de espacios de estados es un modelo matemático de un sistema físico descrito mediante un conjunto de entradas, salidas y variables de estado relacionadas por ecuaciones diferenciales de primer orden que se combinan en una ecuación diferencial matricial de primer orden. Para prescindir del número de entradas, salidas y estados, las variables son expresadas como vectores y las ecuaciones algebraicas se escriben en forma matricial (esto último sólo puede hacerse cuando el sistema dinámico es lineal e invariante en el tiempo). La representación de espacios de estado (también conocida como aproximación en el dominio del tiempo) provee un modo compacto y conveniente de modelar y analizar
sistemas con múltiples entradas y salidas. Con entradas y salidas,
tendríamos que escribir veces la transformada de Laplace para
procesar toda la información del sistema. A diferencia de la aproximación en el dominio de la frecuencia, el uso de la representación de espacios de estado no está limitada a sistemas con componentes lineales ni con condiciones iniciales iguales a cero. El espacio de estado se refiere al espacio de dimensiones cuyos ejes coordenados están formados por variables de estados. El estado del sistema puede ser representado como un vector dentro de ese espacio.
Variables de estado
Las variables de estado son el subconjunto más pequeño de variables de un sistema que pueden representar su estado dinámico completo en un determinado instante. Estas variables de estado deben ser linealmente independientes; una variable de estado no puede ser una combinación lineal de otras variables de estado. El número mínimo de variables de estado necesarias para representar un sistema dado, n, es normalmente igual al orden de la ecuación diferencial que define al sistema. Si el sistema es representado en forma de función de transferencia, el número mínimo de variables de estado es igual al orden del denominador de la función transferencia después de haber sido reducido a una fracción propia. Cabe destacar que al convertir una representación de espacio de estado a la forma de función de transferencia puede perderse información interna sobre el sistema, pudiendo por ejemplo describir un sistema como estable aun cuando la representación de espacio de estado indica que es inestable en ciertos puntos. En circuitos eléctricos, el número de variables de estado es a menudo, pero no siempre, igual al número de elementos almacenadores de energía, como bobinas y condensadores.
Sistemas lineales
Una forma general de representación de espacios de estado de un sistema
lineal con entradas, salidas y variables de estado se escribe de la siguiente forma:
donde
; ; ;
,
,
,
,
.
es llamado vector de estados, es llamado vector de salida,
es llamado vector de entradas (o control), es la matriz de
estados, es la matriz de entrada, es la matriz de salida, y
es la matriz de transmisión directa. Por simplicidad, normalmente se toma como la matriz cero, p. ej.: se elige que el sistema no tenga transmisión. Nótese que en esta formulación general se supone que todas las matrices son variantes en el tiempo, p. ej.: algunos o todos sus
elementos pueden depender del tiempo. La variable temporal puede ser
una "continua" (p. ej.: ) o una discreta (p. ej.: ): en éste
último caso la variable temporal es generalmente indicada como . Dependiendo de las consideraciones tomadas, la representación del modelo de espacios de estado puede tomar las siguientes formas:
Tipo de sistema Modelo de espacio de estados
continuo e invariante en el tiempo
continuo y variante en el tiempo
Discreto e invariante en el tiempo
Discreto y variante en el tiempo
Transformada de Laplace decontinua e invariante en el tiempo
Transformada Z dediscreta e invariante en el tiempo
La estabilidad y la respuesta natural característica de un sistema puede ser
estudiado mediante los autovalores (o valores propios) de la matriz . La estabilidad de un modelo de espacio de estados invariante en el tiempo puede ser fácilmente determinado observando la función transferencia del sistema en forma factorizada. Tendría un forma parecida a la siguiente:
El denominador de la función transferencia es igual al polinomio
característico encontrado tomando el determinante de ,
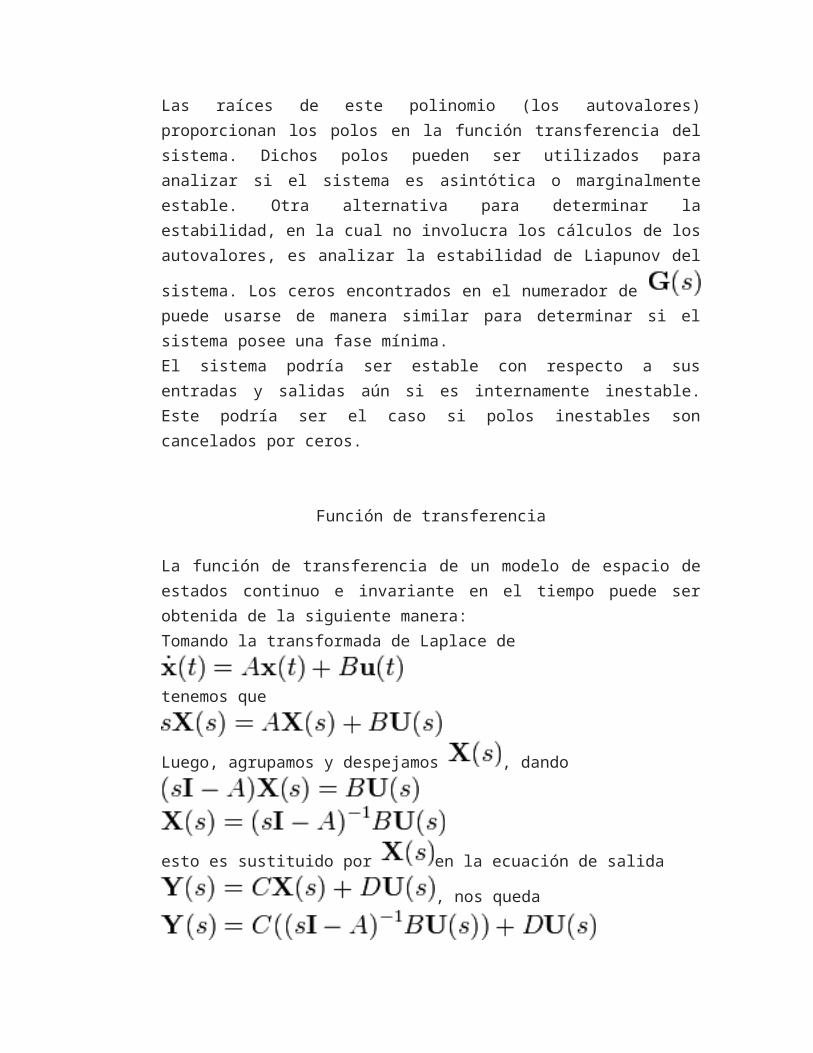
.Las raíces de este polinomio (los autovalores) proporcionan los polos en la función transferencia del sistema. Dichos polos pueden ser utilizados para analizar si el sistema es asintótica o marginalmente estable. Otra alternativa para determinar la estabilidad, en la cual no involucra los cálculos de los autovalores, es analizar la estabilidad de Liapunov del sistema. Los ceros
encontrados en el numerador de puede usarse de manera similar para determinar si el sistema posee una fase mínima.El sistema podría ser estable con respecto a sus entradas y salidas aún si es internamente inestable. Este podría ser el caso si polos inestables son cancelados por ceros.
Función de transferencia
La función de transferencia de un modelo de espacio de estados continuo e invariante en el tiempo puede ser obtenida de la siguiente manera:Tomando la transformada de Laplace de
tenemos que
Luego, agrupamos y despejamos , dando
esto es sustituido por en la ecuación de salida
, nos queda
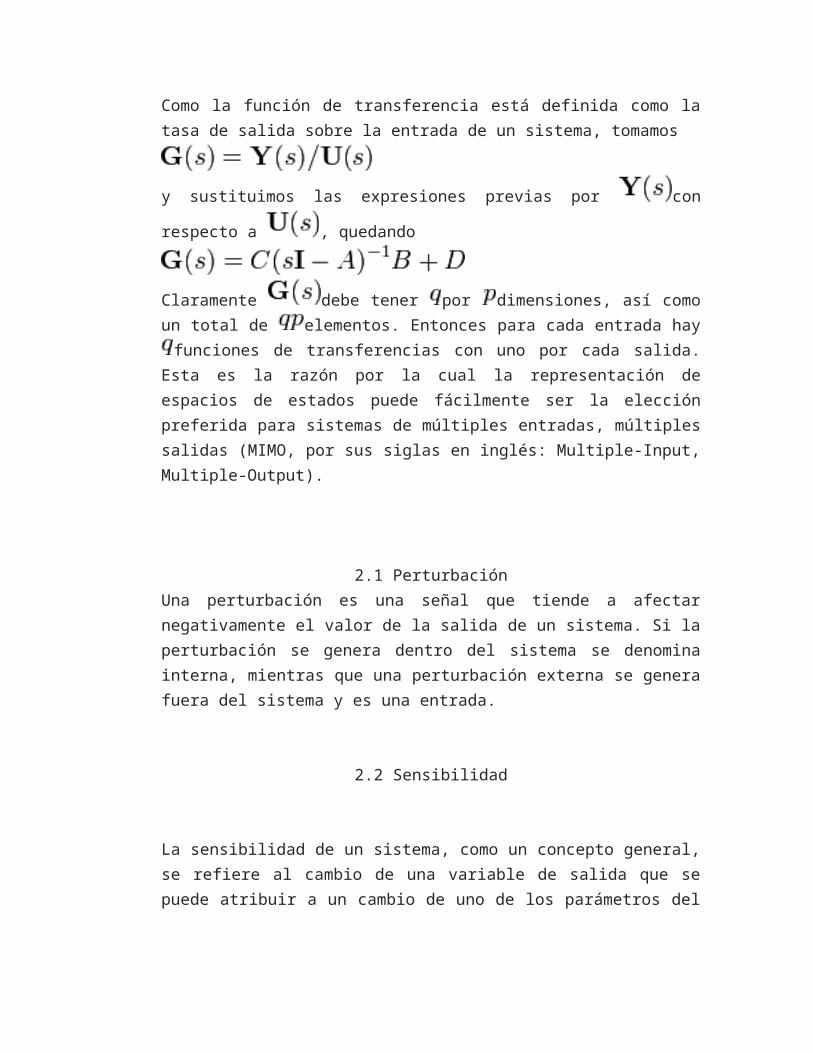
Como la función de transferencia está definida como la tasa de salida sobre la entrada de un sistema, tomamos
y sustituimos las expresiones previas por con respecto a , quedando
Claramente debe tener por dimensiones, así como un total de
elementos. Entonces para cada entrada hay funciones de transferencias con uno por cada salida. Esta es la razón por la cual la representación de espacios de estados puede fácilmente ser la elección preferida para sistemas de múltiples entradas, múltiples salidas (MIMO, por sus siglas en inglés: Multiple-Input, Multiple-Output).
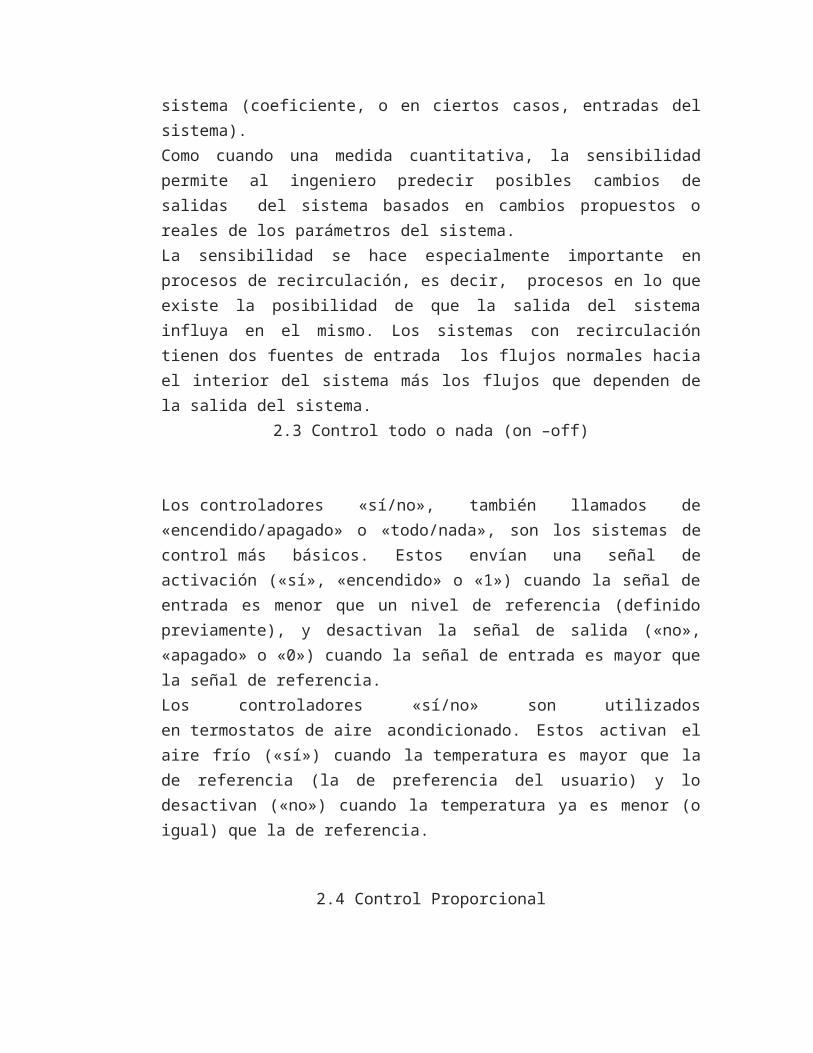
2.1 PerturbaciónUna perturbación es una señal que tiende a afectar negativamente el valor de la salida de un sistema. Si la perturbación se genera dentro del sistema se denomina interna, mientras que una perturbación externa se genera fuera del sistema y es una entrada.
2.2 Sensibilidad
La sensibilidad de un sistema, como un concepto general, se refiere al cambio de una variable de salida que se puede atribuir a un cambio de uno de los parámetros del sistema (coeficiente, o en ciertos casos, entradas del sistema).Como cuando una medida cuantitativa, la sensibilidad permite al ingeniero predecir posibles cambios de salidas del sistema basados en cambios propuestos o reales de los parámetros del sistema.La sensibilidad se hace especialmente importante en procesos de recirculación, es decir, procesos en lo que existe la posibilidad de que la salida del sistema influya en el mismo. Los sistemas con recirculación tienen dos fuentes de entrada los flujos normales hacia el interior del sistema más los flujos que dependen de la salida del sistema.
2.3 Control todo o nada (on –off)
Los controladores «sí/no», también llamados de «encendido/apagado» o «todo/nada», son los sistemas de control más básicos. Estos envían una señal de activación («sí», «encendido» o «1») cuando la señal de entrada es menor que un nivel de referencia (definido previamente), y desactivan la señal de salida («no», «apagado» o «0») cuando la señal de entrada es mayor que la señal de referencia.Los controladores «sí/no» son utilizados en termostatos de aire acondicionado. Estos activan el aire frío («sí») cuando la temperatura es mayor que la de referencia (la de preferencia del usuario) y lo desactivan («no») cuando la temperatura ya es menor (o igual) que la de referencia.
2.4 Control Proporcional
Un controlador proporcional calcula la diferencia entre la señal de variable de proceso y la señal de setpoint, lo que vamos a llamar como error. Este valor representa cuanto el proceso se está desviando del valor del setpoint, y puede ser calculado como SP-PV o como PV-SP, dependiendo si es que o no el controlador tiene que producir un incremento en su señal de salida
para causar un incremento en la variable de proceso, o tener un decremento en su señal de salida para hacer de igual manera un incremento de PV (variable de proceso). Esta manera como nosotros hacemos esta sustracción determina si un controlador será reverse-acting (acción inversa) o direct-acting (acción directa). La dirección de acción requerida por el controlador es determinada por la naturaleza del proceso, transmisor, y elemento final de control. En este caso, asumimos que un incremento en la señal de salida enviada a la válvula tiene como consecuencia un incremento en el flujo de vapor, y por tanto temperatura alta, entonces nuestro algoritmo necesitará ser de acción inversa ó reverse-acting (por ejemplo un incremento en la medida de temperatura tiene como resultado un decremento de la señal de salida; error calculado como SP-PV). Este error es entonces multiplicado por un valor constante llamado ganancia, la cual es programada dentro del controlador. Este resultado, más una cantidad de “bias”, entonces la señal de salida hacia la válvula sería:
m = Kp*e + b
Donde: m = Salida del controlador e = Error (diferencia entre PV y SP) Kp = ganancia proporcional B = bias
2.5 control Integrador.Los integradores nos permiten modelar sistemas dinámicos lineales y no lineales descritos mediante un modelo en espacio de estados. El hecho de que los sistemas sean representados mediante ecuaciones diferenciales implica que será necesario integrar dichas ecuaciones para poder simular cuál será la evolución temporal del sistema. Simulan ofrece una herramienta de integraci´on Numérica que incluye varios métodos de integración. Esto permite integrar señales temporales, Independientemente de que el sistema sea lineal o no.
El modo de control Integral tiene como propósito disminuir y eliminar el error en estado estacionario, provocado por el modo proporcional. El control integral actúa cuando hay una desviación entre la variable y el punto de consigna, integrando esta desviación en el tiempo y sumándola a la acción
proporcional. El error es integrado, lo cual tiene la función de promediarlo o sumarlo por un período determinado; Luego es multiplicado por una constante Ki. Posteriormente, la respuesta integral es adicionada al modo Proporcional para formar el control P + I con el propósito de obtener una respuesta estable del sistema sin error estacionario.El modo integral presenta un desfasamiento en la respuesta de 90º que sumados a los 180º de la retroalimentación ( negativa ) acercan al proceso a tener un retraso de 270º, luego entonces solo será necesario que el tiempo muerto contribuya con 90º de retardo para provocar la oscilación del proceso. <<< la ganancia total del lazo de control debe ser menor a 1, y así inducir una atenuación en la salida del controlador para conducir el proceso a estabilidad del mismo. >>> Se caracteriza por el tiempo de acción integral en minutos por repetición. Es el tiempo en que delante una señal en escalón, el elemento final de control repite el mismo movimiento correspondiente a la acción proporcional.El control integral se utiliza para obviar el inconveniente del offset (desviación permanente de la variable con respecto al punto de consigna) de la banda proporcional.La fórmula del integral está dada por:
2.6 Control derivativoLa acción derivativa se manifiesta cuando hay un cambio en el valor absoluto del error; (si el error es constante, solamente actúan los modos proporcional e integral).El error es la desviación existente entre el punto de medida y el valor consigna, o "Set Point".La función de la acción derivativa es mantener el error al mínimo corrigiéndolo proporcionalmente con la misma velocidad que se produce; de esta manera evita que el error se incremente.Se deriva con respecto al tiempo y se multiplica por una constante D y luego se suma a las señales anteriores (P+I). Es importante adaptar la respuesta de control a los cambios en el sistema ya que una mayor derivativa corresponde a un cambio más rápido y el controlador puede responder acordemente.La fórmula del derivativo está dada por:

El control derivativo se caracteriza por el tiempo de acción derivada en minutos de anticipo. La acción derivada es adecuada cuando hay retraso entre el movimiento de la válvula de control y su repercusión a la variable controlada.
Cuando el tiempo de acción derivada es grande, hay inestabilidad en el proceso. Cuando el tiempo de acción derivada es pequeño la variable oscila demasiado con relación al punto de consigna. Suele ser poco utilizada debido a la sensibilidad al ruido que manifiesta y a las complicaciones que ello conlleva.El tiempo óptimo de acción derivativa es el que retorna la variable al punto de consigna con las mínimas oscilacionesEjemplo: Corrige la posición de la válvula (elemento final de control) proporcionalmente a la velocidad de cambio de la variable controlada.
La acción derivada puede ayudar a disminuir el rebasamiento de la variable durante el arranque del proceso. Puede emplearse en sistemas con tiempo de retardo considerables, porque permite una repercusión rápida de la variable después de presentarse una perturbación en el proceso.
2.7 Controlador PID (proporcional, integral y derivativo)
El objetivo de los ajustes de los parámetros PID es lograr que el bucle de control corrija eficazmente y en el mínimo tiempo los efectos de las perturbaciones; se tiene que lograr la mínima integral de error. Si los parámetros del controlador PID (la ganancia del proporcional, integral y derivativo) se eligen incorrectamente, el proceso a controlar puede ser inestable, por ejemplo, que la salida de este varíe, con o sin oscilación, y está limitada solo por saturación o rotura mecánica. Ajustar un lazo de control significa ajustar los parámetros del sistema de control a los valores óptimos para la respuesta del sistema de control deseada. El comportamiento óptimo ante un cambio del proceso o cambio del "setpoint" varía dependiendo de la aplicación. Generalmente, se requiere estabilidad ante la respuesta dada por el controlador, y este no debe oscilar ante ninguna combinación de las condiciones del proceso y cambio de

"setpoints". Algunos procesos tienen un grado de no linealidad y algunos parámetros que funcionan bien en condiciones de carga máxima no funcionan cuando el proceso está en estado de "sin carga". Hay varios métodos para ajustar un lazo de PID. El método más efectivo generalmente requiere del desarrollo de alguna forma del modelo del proceso, luego elegir P, I y D basándose en los parámetros del modelo dinámico. Los métodos de ajuste manual pueden ser muy ineficientes. La elección de un método dependerá de si el lazo puede ser "desconectado" para ajustarlo, y del tiempo de respuesta del sistema. Si el sistema puede desconectarse, el mejor método de ajuste a menudo es el de ajustar la entrada, midiendo la salida en función del tiempo, y usando esta respuesta para determinar los parámetros de control. Ahora describimos como realizar un ajuste manual.
2.8 Métodos Ziegler – Nichols para la sintonización de controladores PID
El método de Ziegler-Nichols permite ajustar o "sintonizar" un regulador PID de forma empírica, sin necesidad de conocer las ecuaciones de la planta o sistema controlado. Estas reglas de ajuste propuestas por Ziegler y Nichols fueron publicadas en 1942 y desde entonces es uno de los métodos de sintonización más ampliamente difundido y utilizado. Los valores propuestos por este método intentan conseguir en el sistema realimentado una respuesta al escalón con un sobrepulso máximo del 25%, que es un valor robusto con buenas características de rapidez y estabilidad para la mayoría de los sistemas.El método de sintonización de reguladores PID de Ziegler-Nichols permite definir las ganancias proporcional, integral y derivativa a partir de la respuesta del sistema en lazo abierto o a partir de la respuesta del sistema en lazo cerrado. Cada uno de los dos ensayos se ajusta mejor a un tipo de sistema.
Sintonización por la respuesta al escalónEste método de sintonización se adapta bien a los sistemas que son estables en lazo abierto y que presentan un tiempo de retardo desde que reciben la señal de control hasta que comienzan a actuar.Para poder determinar la respuesta al escalón de la planta o sistema controlado, se debe retirar el controlador PID y sustituirlo por una señal escalón aplicada al accionador.
En la siguiente figura se muestra la modificación que hay que realizar al sistema de control en lazo cerrado para convertirlo en un sistema en lazo abierto que responda a una señal escalón, retirando el controlador PID:
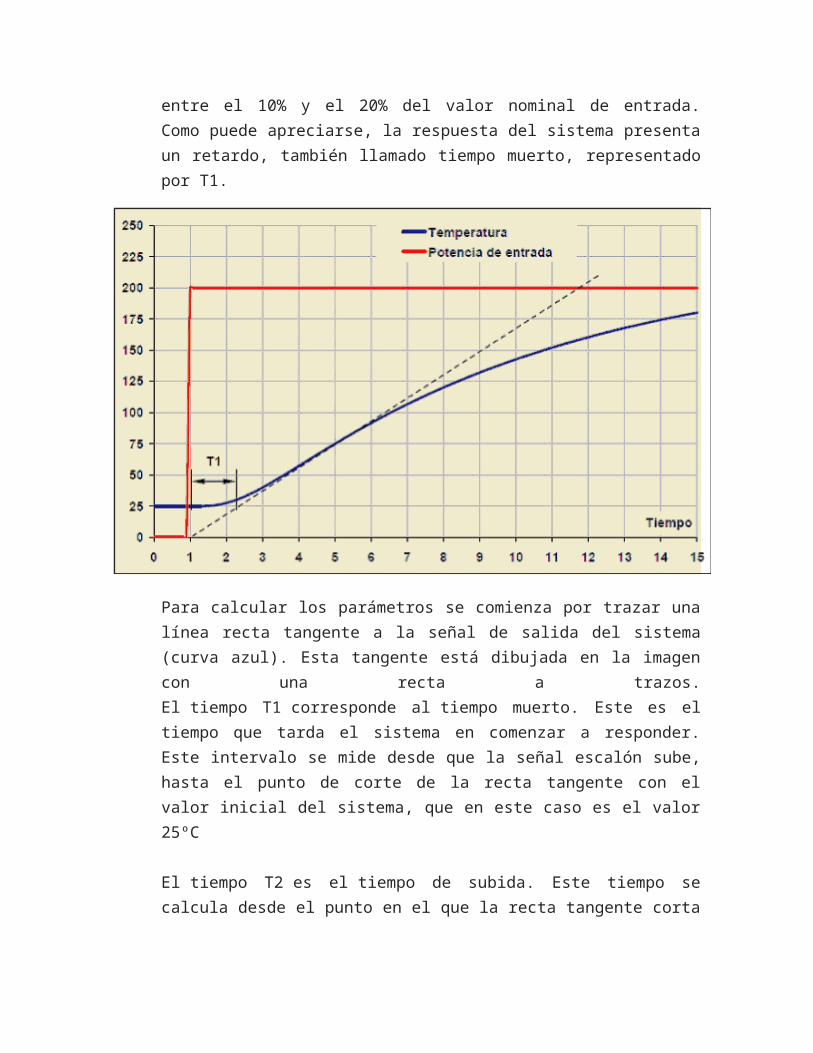
En la imagen siguiente se puede ver representado en rojo la entrada escalón al accionador o señal c(t). En azul se representa la salida del sistema medida por el sensor o señal h(t). El escalón de entrada c(t) debe estar entre el 10% y el 20% del valor nominal de entrada.Como puede apreciarse, la respuesta del sistema presenta un retardo, también llamado tiempo muerto, representado por T1.
Para calcular los parámetros se comienza por trazar una línea recta tangente a la señal de salida del sistema (curva azul). Esta tangente está dibujada en la imagen con una recta a trazos.El tiempo T1 corresponde al tiempo muerto. Este es el tiempo que tarda el sistema en comenzar a responder. Este intervalo se mide desde que la señal escalón sube, hasta el punto de corte de la recta tangente con el valor inicial del sistema, que en este caso es el valor 25ºC
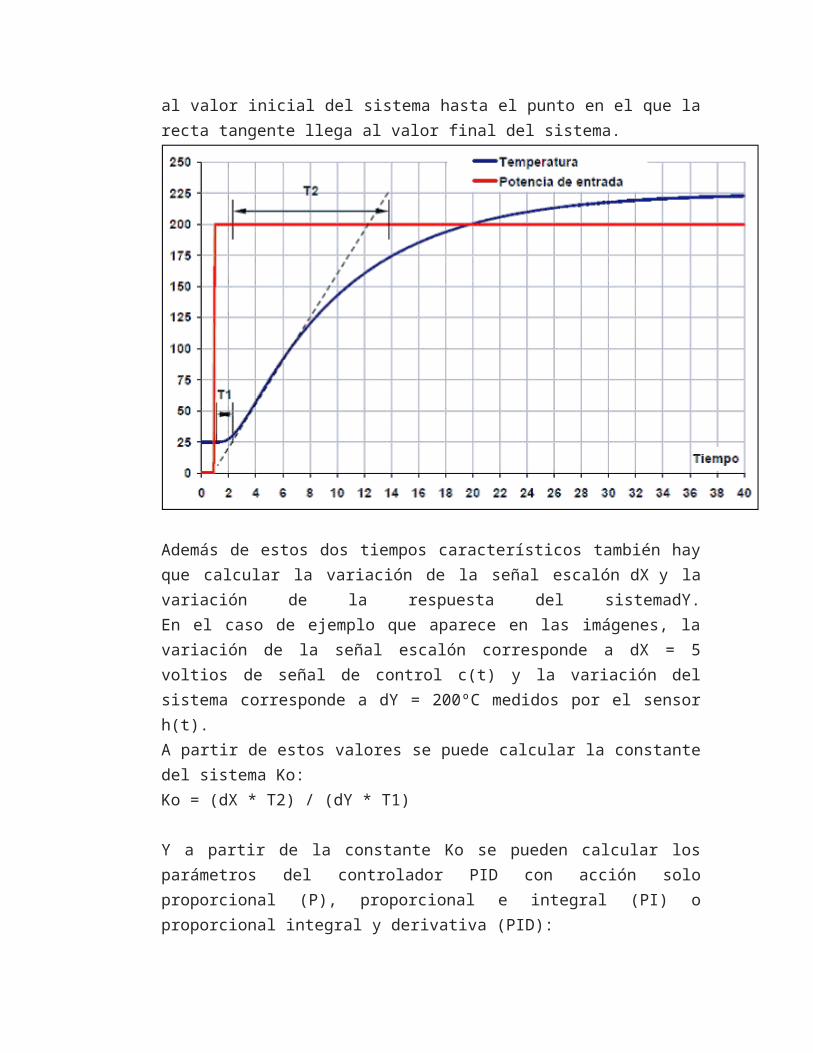
El tiempo T2 es el tiempo de subida. Este tiempo se calcula desde el punto en el que la recta tangente corta al valor inicial del sistema hasta el punto en el que la recta tangente llega al valor final del sistema.
Además de estos dos tiempos característicos también hay que calcular la variación de la señal escalón dX y la variación de la respuesta del sistemadY.En el caso de ejemplo que aparece en las imágenes, la variación de la señal escalón corresponde a dX = 5 voltios de señal de control c(t) y la variación del sistema corresponde a dY = 200ºC medidos por el sensor h(t).A partir de estos valores se puede calcular la constante del sistema Ko:Ko = (dX * T2) / (dY * T1)
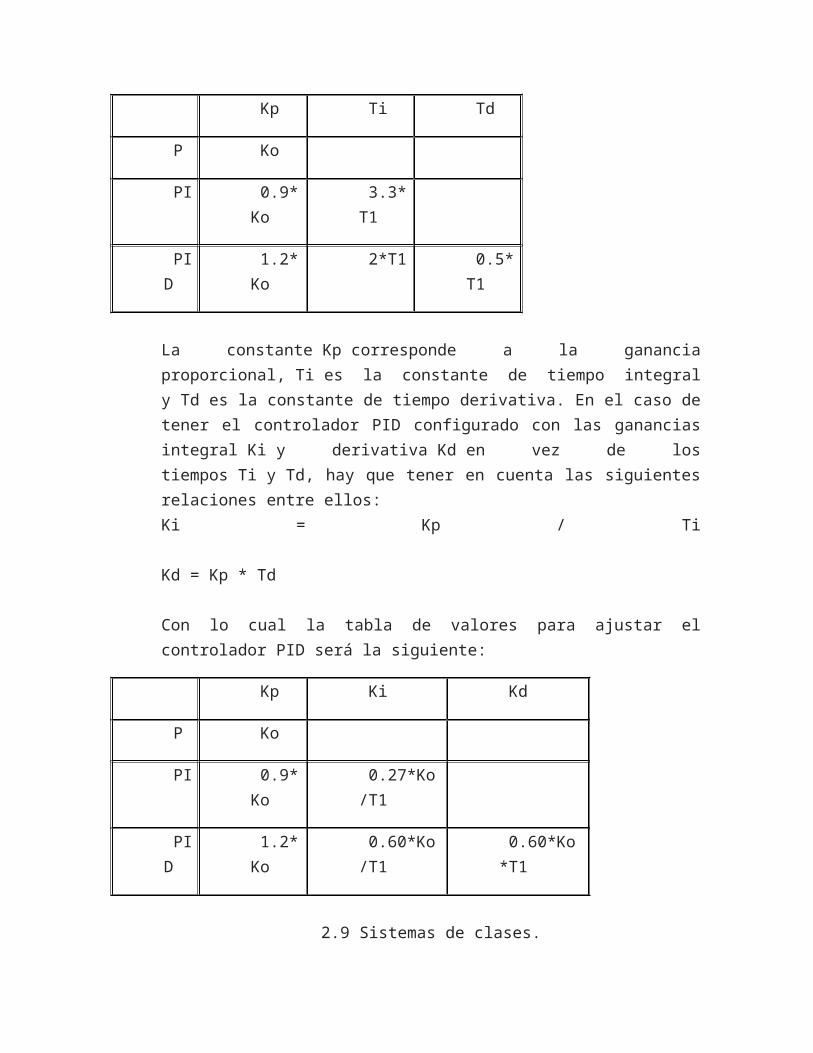
Y a partir de la constante Ko se pueden calcular los parámetros del controlador PID con acción solo proporcional (P), proporcional e integral (PI) o proporcional integral y derivativa (PID):
Kp Ti Td
P Ko
PI 0.9*Ko
3.3*T1
PID 1.2*Ko
2*T1 0.5*T1
La constante Kp corresponde a la ganancia proporcional, Ti es la constante de tiempo integral y Td es la constante de tiempo derivativa. En el caso de tener el controlador PID configurado con las ganancias integral Ki y derivativa Kd en vez de los tiempos Ti y Td, hay que tener en cuenta las siguientes relaciones entre ellos:Ki = Kp / Ti
Kd = Kp * Td
Con lo cual la tabla de valores para ajustar el controlador PID será la siguiente:
Kp Ki Kd
P Ko
PI 0.9*Ko 0.27*Ko/T1
PID 1.2*Ko 0.60*Ko/T1 0.60*Ko*T1
2.9 Sistemas de clases.
Un sistema de control es un conjunto de dispositivos encargados de administrar, ordenar, dirigir o regular el comportamiento de otro sistema, con el fin de reducir las probabilidades de fallo y obtener los resultados deseados. Por lo general, se usan sistemas de control industrial en procesos de producción industriales para controlar equipos o máquinas.
Existen dos clases comunes de sistemas de control, sistemas de lazo abierto y sistemas de lazo cerrado. En los sistemas de control de lazo abierto la salida se genera dependiendo de la entrada; mientras que en los sistemas de lazo cerrado la salida depende de las consideraciones y correcciones realizadas por la retroalimentación. Un sistema de lazo cerrado es llamado también sistema de control con realimentación. Los sistemas de control más modernos en ingeniería automatizan procesos en base a muchos parámetros y reciben el nombre de controladores de automatización programables (PAC).
Objetivos:Los sistemas de control deben conseguir los siguientes objetivos:Ser estables y robustos frente a perturbaciones y errores en los modelos.Ser eficiente según un criterio preestablecido evitando comportamientos bruscos e irreales.Necesidades de la supervisión de procesosLimitaciones de la visualización de los sistemas de adquisición y control.Control vs MonitorizaciónControl software. Cierre de lazo de control.Recoger, almacenar y visualizar información.Minería de datos.
3. Diseño de controladores basados en la respuesta en frecuencia y aplicaciones
3.1 Respuesta de frecuencia
La respuesta de frecuencia es una característica de un sistema que tiene una respuesta medida que es el resultado de una entrada conocida aplicada. En el caso de una estructura mecánica, la respuesta de frecuencia es el espectro de la vibración de la estructura, dividido entre el espectro de la fuerza de entrada al sistema. Para medir la respuesta de frecuencia de un sistema mecánico, hay que medir los espectros de la fuerza de entrada al sistema y de la respuesta de vibración .Esto se hace más fácilmente con un analizadorTRF. Las mediciones de respuesta de frecuencia se usan mucho en el análisis modal de sistemas mecánicos.La función de respuesta de frecuencia es una cantidad tridimensional que consiste en amplitud vs fase vs frecuencia. Por eso una gráfica verdadera de ella necesita tres dimensiones, lo que es difícil de representar en papel. Una manera de realizar esto es la llamada gráfica de Bode, que consiste en dos curvas, una de amplitud vs frecuencia, y una de fase vs frecuencia. Otra manera de ver la función es de resolver la porción de fase en dos componentes ortogonales, una parte en fase (llamada la parte real) y una parte 90 grados fuera de fase (llamada la parte imaginaria o parte de la cuadratura). A veces se hace una gráfica de esas dos partes una contra la otra, y el resultada es la gráfica Nyquist.
3.2 Estabilidad
En ciencias, una situación es estable si se mantiene en estado estacionario, es decir, igual en el tiempo y una modificación razonablemente pequeña de las condiciones iniciales no altera significativamente el futuro de la situación. Dependiendo del área en particular, estabilidad tiene significados ligeramente diferentes. Bajo esta acepción se recomienda consultar:Estabilidad de partículas, referida a la física de partículas subatómicas, también llamadas partículas elementales.Equilibrio mecánico estable, referido a un estado de equilibrio mecánico en el que pequeñas perturbaciones del sistema no son seguidas por un alejamiento indefinido de la situación de equilibrio.
3.3 Criterio de estabilidad de NyquistCriterio basado en la representación de la respuesta en frecuencia mediante el diagrama de Nyquist.1. Facilita información sobre estabilidad absoluta.2. Facilita información sobre estabilidad relativa y permite mejorarla.3. Permite interpretar la respuesta en frecuenciaUn sistema es estable si y sólo si el conjunto neto de giros positivos entorno al punto s=1+j0 por el diagrama de Nyquist reflejado deKGP(s)Heq(s) más el número de polos de GP(s) en el semiplano derecho es cero.Polos de 1+KGP(s)Heq(s) ! Ceros de M(s) ! Polos de GP(s)Ceros de 1+KGp(s)Heq(s) ! Polos de M(s)
El criterio de estabilidad de Nyquist relaciona la respuesta frecuencial a lazo abierto con la estabilidad a lazo cerrado; basado en un teorema de la variable compleja que se fundamenta en el mapeo de los contornos en el plano complejo. Parte de los fundamentos que dan base al criterio de estabilidad se nombrarán a continuación. • Para una trayectoria cerrada y continua en el plano S, que no pasa por ninguna singularidad, le corresponde una trayectoria cerrada en el plano F(s). • Si el contorno en el plano S (Γs ), encierra igual número de ceros que polos de F(s), el contorno en F(s), (ΓF (s) ), no encerrará el origen. • Si el Γs encierra n polos de F(s), ΓF (s) rodea al origen n-veces en sentido anti horario. • Si el Γs encierra m ceros de F(s), ΓF (s) rodea al origen m-veces en sentido horario.
3.4 Márgenes de estabilidadLos márgenes de estabilidad pueden describirse y cuantificarse también en diagramas de Bode.Un diagrama de Bode es una representación gráfica que sirve para caracterizar la respuesta en frecuencia de un sistema. Normalmente consta de dos gráficas separadas, una que corresponde con la magnitud de dicha función y otra que corresponde con la fase. Recibe su nombre del científico estadounidense que lo desarrolló, Hendrik Wade Bode.
Es una herramienta muy utilizada en el análisis de circuitos en electrónica, siendo fundamental para el diseño y análisis de filtros y amplificadores.
3.5 Relación de fase-ganancia de bodeEl diagrama de magnitud de Bode dibuja el módulo de la función de transferencia (ganancia) en decibelios en función de la frecuencia (o la frecuencia angular) en escala logarítmica. Se suele emplear en procesado de señal para mostrar la respuesta en frecuencia de un sistema lineal e invariante en el tiempo.
El diagrama de fase de Bode representa la fase de la función de transferencia en función de la frecuencia (o frecuencia angular) en escala logarítmica. Se puede dar en grados o en radianes. Permite evaluar el desplazamiento en fase de una señal a la salida del sistema respecto a la entrada para una frecuencia determinada. Por ejemplo, tenemos una señal Asin(ωt) a la entrada del sistema y asumimos que el sistema atenúa por un factor x y desplaza en fase −Φ. En este caso, la salida del sistema será (A/x) sin(ωt − Φ). Generalmente, este desfase es función de la frecuencia (Φ= Φ(f)); esta dependencia es lo que nos muestra el Bode. En sistemas eléctricos esta fase deberá estar acotada entre -90° y 90°.
La respuesta en amplitud y en fase de los diagramas de Bode no pueden por lo general cambiarse de forma independiente: cambiar la ganancia implica cambiar también desfase y viceversa. En sistemas de fase mínima (aquellos que tanto su sistema inverso como ellos mismos son causales y estables) se puede obtener uno a partir del otro mediante la transformada de Hilbert.
3.6 Respuesta de frecuencia en lazo cerrado
Hay dos tipos de realimentación: positiva y negativa; nosotros usaremos la segunda porque es nuestro objeto de estudio. El esquema general es: Para sistemas en lazo cerrado la función de transferencia H(s) se expresa como:112()()()()1()()G sY s H sU s G s G s= =+ Bajo el estado senoidal permanente s = jw, la ecuación anterior se convierte en:112()()()()1()()G jY j H jU j G j G jωωωω ω ω= =+ La función de transferencia en estado senoidal permanente H(jw) se puede expresar como:)()()( ωωω j H j H j H ∠= Donde la magnitud o módulo de H(jw) es:111212()()()1()()1()()G jG j H jG j G j G j G jωωωω ω ω ω= =+ + y la fase de H(s) es:[ ]112()()()1()() H H j j G j G j G jω φ ω ω ω ω∠ = = ∠ −∠ + Los sistemas realimentados son mejores que los de lazo abierto ya que permiten mejorar la estabilidad del sistema, acelerar la respuesta transitoria, mejorar las características del estado estacionario, facilitar el rechazo a perturbaciones y disminuir la sensibilidad a las variaciones de parámetros. Sin embargo hay que tener cuidado, ya que la realimentación también puede ser dañina y no solo no mejorar sino incluso empeorar la estabilidad del sistema.
3.7 CompensaciónLa compensación es la modificación de la dinámica de un sistema, realizada para satisfacer las especificaciones determinadas.Si se necesita un compensador para cumplir las especificaciones de desempeño, el diseñador debe plantear un dispositivo físico que tenga prescrita la función de transferencia del compensador.Entre los muchos tipos de compensadores, los de mayor uso son los compensadores de adelanto, los de atraso, los de atraso-adelanto y los de realimentación de velocidad (tacómetros).Los compensadores de adelanto, de atraso y de atraso-adelanto pueden ser dispositivos electrónicos tales como circuitos que usen amplificadores operacionales, redes RC eléctricas, mecánicas, neumáticas, hidráulicas o una combinación de ellas, o, amplificadores.En el diseño real de un sistema de control, el que se use un compensador electrónico, neumático o hidráulico debe decidirse parcialmente con base en la naturaleza de la planta que se controla.
4. DISEÑO DE CONTROLADORES BASADOS EN EL LUGAR GEOMÉTRICO DE LAS RAÍCES Y ESPACIO DE ESTADOS.
4.1 Definición Del Metodo Del Lugar Geometrico De Las Raices (Root-Locus)

En este método se representan las raíces de la ecuación característica para todos los valores de un parámetro del sistema. La idea básica detrás del método de lugar de las raíces es que los valores de s que hacen de la función de transferencia alrededor del lazo sea igual a -1 deben de satisfacer la ecuación característica del sistema. Es la representación grafica de los polos en lazo cerrado cuando varia un parámetro de un sistema. También se define como un método de análisis y diseño para la estabilidad y respuesta transitoria. Nace por la necesidad de solucionar sistemas de control retroalimentados de orden superior a dos, desde el punto de vista cualitativo, cuando la solución matemática es muy compleja. Este método es una técnica grafica que nos da la descripción cualitativa del sistema cuando se cambian varios parámetros, y herramienta cuantitativa, que proporciona más información que otros métodos. Además el LGR proporciona gráficamente márgenes de estabilidad e inestabilidad y la relación entre ambas. El lugar geométrico de las raíces muestra los cambios en la respuesta transitoria cuando la ganancia K, varia. Uno de los problemas de un sistema de control, es que siempre que los polos de la función de transferencia en lazo abierto se encuentren fácilmente, los polos de la función de transferencia en lazo cerrado son más difíciles de hallar y además, los polos en lazo cerrado cambian con modificaciones en la ganancia de un sistema que es un numero complejo descrito en coordenadas cartesianas, puede ser representado como un vector. Para trazar el LGR, usando un mínimo de cálculos, nos basaremos en las siguientes reglas: 1.- Numero de ramas.- es la trayectoria que recorre un polo, por lo tanto habrá una rama para cada polo en lazo cerrado, el numero de ramas es igual al numero de polos en lazo cerrado. 2.- Simetría.- el LGR de las raíces es simétrico alrededor del eje real. Cuando no existen polos complejos en lazo cerrado en pares conjugados. 3.- Segmentos del eje real.- sobre el eje real, para K>0, el LGR existe a la izquierda de un numero impar de polos finitos en lazo abierto, sobre el eje real, y/o ceros finitos en lazo abierto. 4.- Puntos de inicio y fin.- El LGR comienza en los polos finitos e infinitos de G(s)H(s) y termina en los ceros finitos e infinitos de G(s)H(s). 5.- Comportamiento en el infinito.- El lugar geométrico de las raíces se aproxima a líneas rectas como asuntotas cuando el LGR se aproxima al infinito. Además, la ecuación de las asíntotas esta dada por la intersección del eje real, y el ángulo.
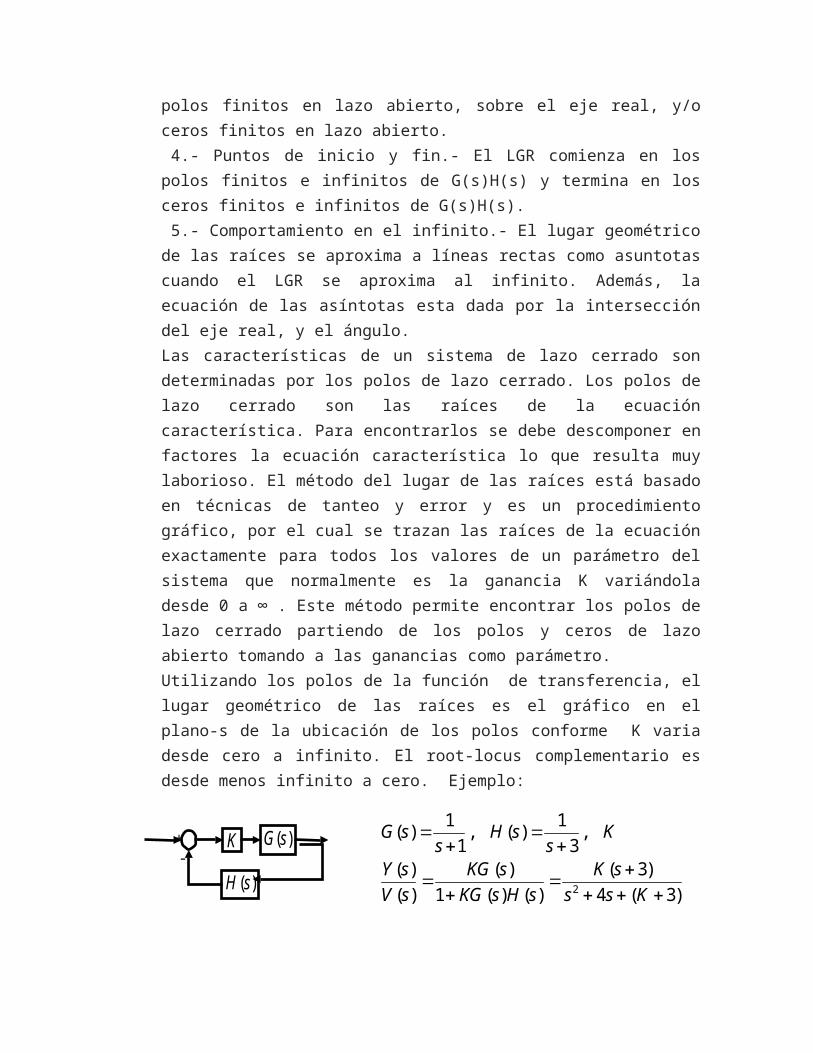
Las características de un sistema de lazo cerrado son determinadas por los polos de lazo cerrado. Los polos de lazo cerrado son las raíces de la ecuación característica. Para encontrarlos se debe descomponer en factores la ecuación característica lo que resulta muy laborioso. El método del lugar de las raíces está basado en técnicas de tanteo y error y es un procedimiento gráfico, por el cual se trazan las raíces de la ecuación exactamente para todos los valores de un parámetro del sistema que normalmente es la ganancia K variándola desde 0 a ∞ . Este método permite encontrar los polos de lazo cerrado partiendo de los polos y ceros de lazo abierto tomando a las ganancias como parámetro. Utilizando los polos de la función de transferencia, el lugar geométrico de las raíces es el gráfico en el plano-s de la ubicación de los polos conforme K varia desde cero a infinito. El root-locus complementario es desde menos infinito a cero. Ejemplo:
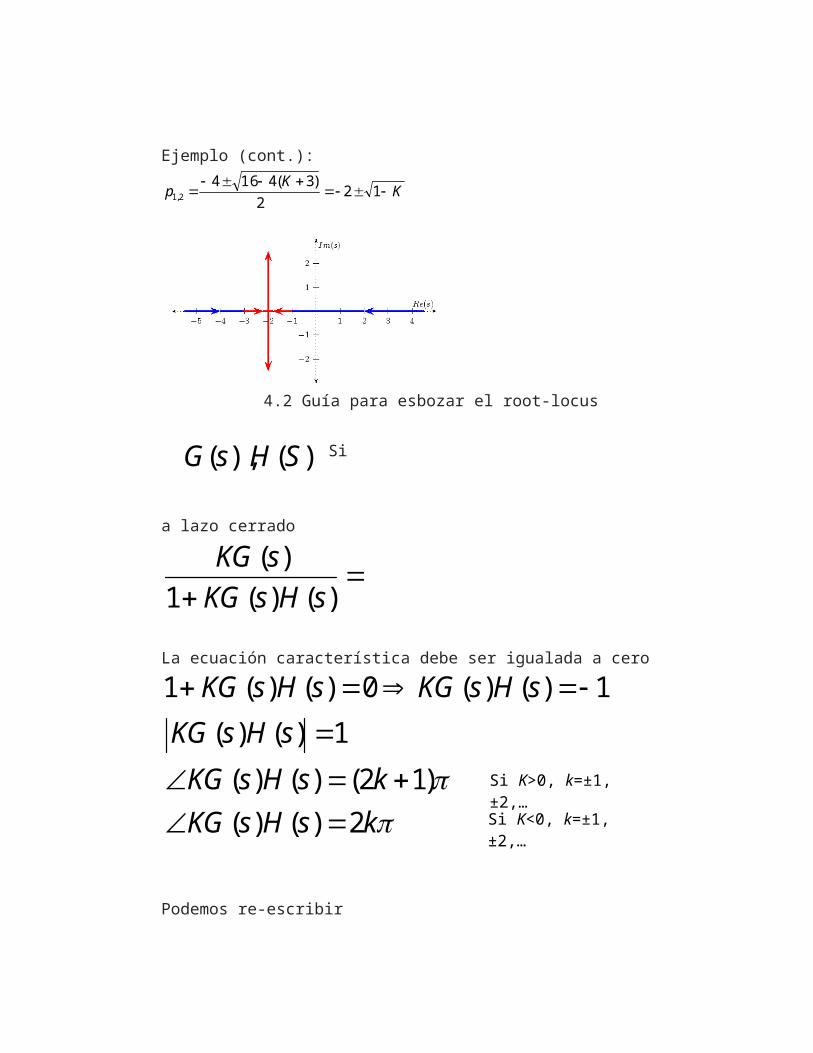
Ejemplo (cont.):
KK
p
122
)3(41642,1
4.2 Guía para esbozar el root-locus
Si
a lazo cerrado
K )(sG
)(sH
-+
)3(4
)3(
)()(1
)(
)(
)(
,3
1)(,
1
1)(
2
Kss
sK
sHsKG
sKG
sV
sY
Ks
sHs
sG
)(),( SHsG
)()(1
)(
sHsKG
sKG
La ecuación característica debe ser igualada a cero
ksHsKG
ksHsKG
sHsKG
sHsKGsHsKG
2)()(
)12()()(
1)()(
1)()(0)()(1
Podemos re-escribir
Podemos re-escribir
Obteniendo entonces:
Debemos hacer lo mismo con los ángulos
º360º180)()()()(11
kpszssHsKGn
ii
m
ii
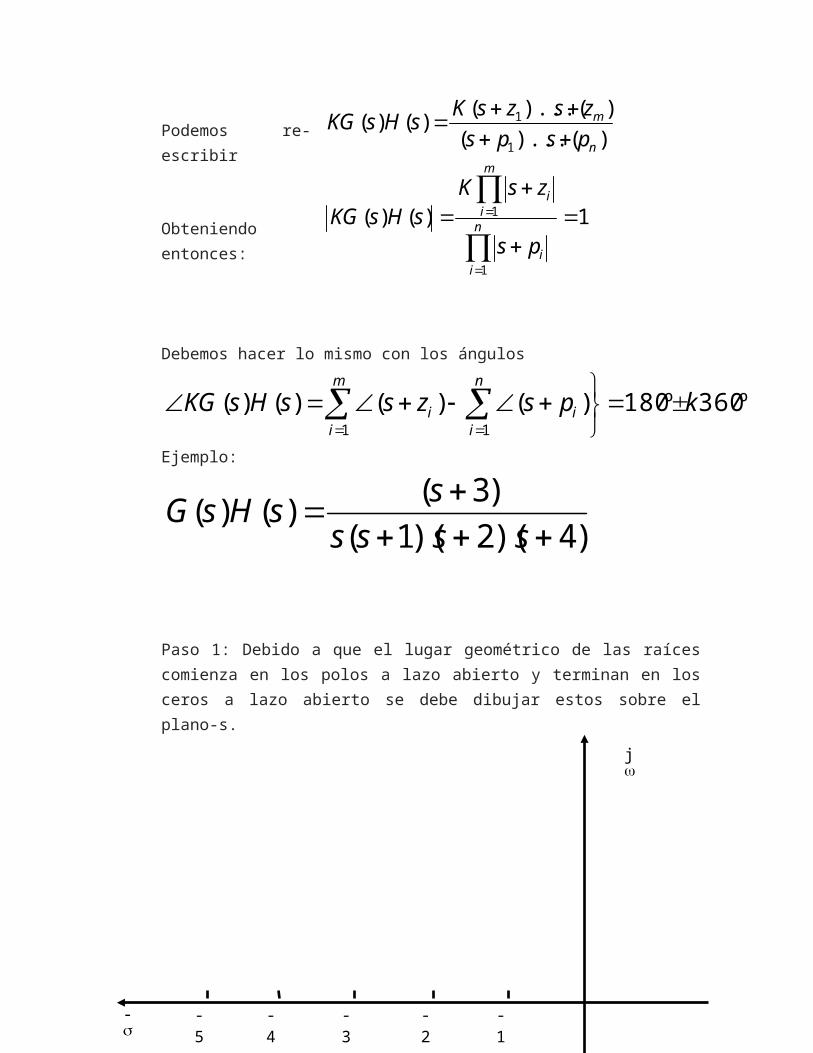
Ejemplo:
)4)(2)(1(
)3()()(
ssss
ssHsG
Si K>0, k=±1, ±2,…
Si K<0, k=±1, ±2,…
1)()(
))...((
))...(()()(
1
1
1
1
n
ii
m
ii
n
m
ps
zsKsHsKG
psps
zszsKsHsKG
Paso 1: Debido a que el lugar geométrico de las raíces comienza en los polos a lazo abierto y terminan en los ceros a lazo abierto se debe dibujar estos sobre el plano-s.
Paso 2:Utilizando la condición de ángulo se determina que parte del eje real pertenece al root-locus. Supondremos raíces dentro de los intervalos en el plano-s.
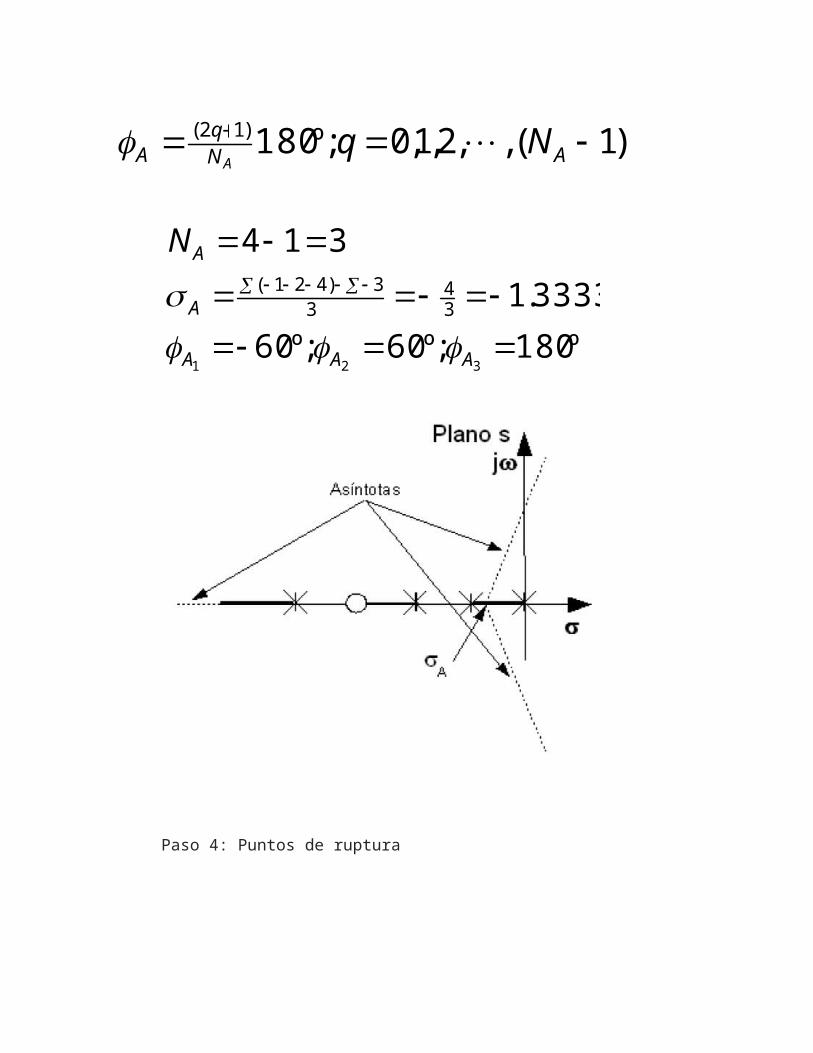
Paso 3: Considerando que la función de transferencia a lazo abierto tiene n polos y m zeros y que para los sistemas n>m, se tiene un cierto número de ramas que comienzan en los polos y deben dirigirse a los zeros, como hay menos zeros que polos, estas ramas se dirigen a ceros en el infinito a lo largo de asíntotas. El Número de asíntotas es:NA=n-mLa ubicación del punto de partida
-1-2-3-4-5
j
-
0X X X X-
j
s1-5 -4 -3 -2 -1º180º00º0º180º0)()(:
111
n
ii
m
ii pszss
A
m
ij
n
jj
A N
zp
NsHsGcerossHsGPolos
A
11
)()()()()()(
Y el ángulo de salida es:
º180;º60;º60
3333.1
314
321
34
33)421(
AAA
A
AN
Paso 4: Puntos de ruptura
)1(,,2,1,0;º180)12( AN
qA Nq
A
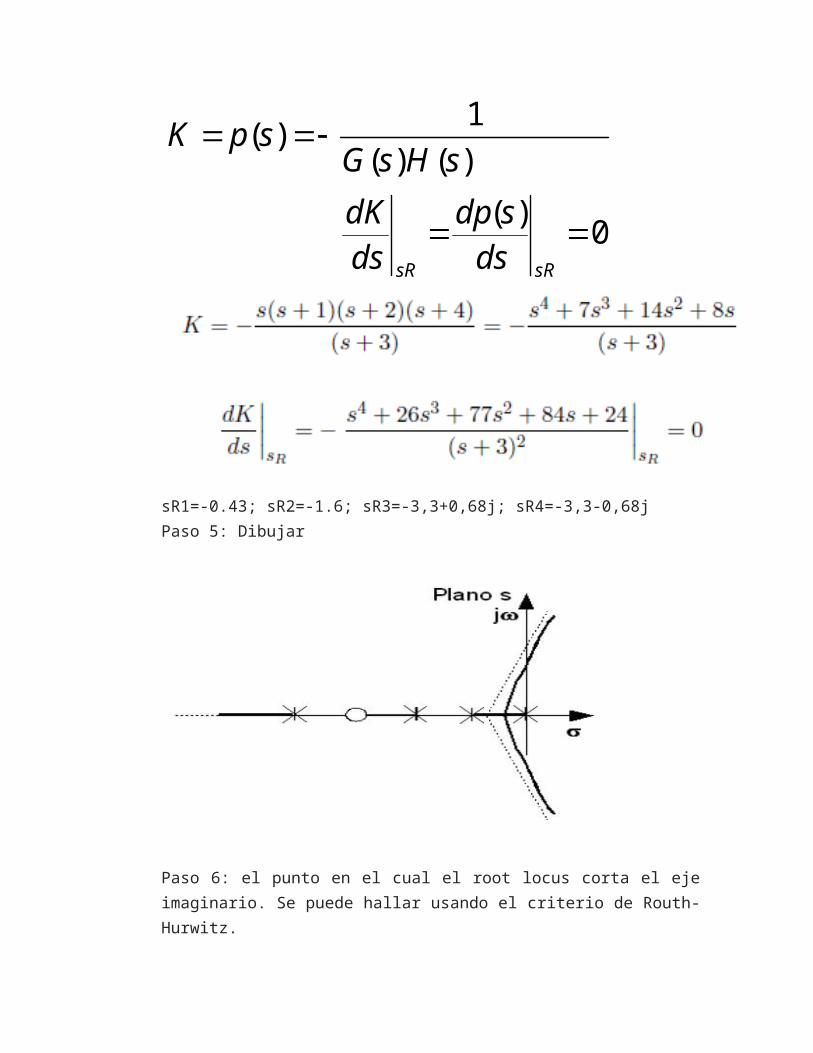
0)(
)()(
1)(
sRsR dssdp
dsdK
sHsGspK
sR1=-0.43; sR2=-1.6; sR3=-3,3+0,68j; sR4=-3,3-0,68jPaso 5: Dibujar
Paso 6: el punto en el cual el root locus corta el eje imaginario. Se puede hallar usando el criterio de Routh-Hurwitz.
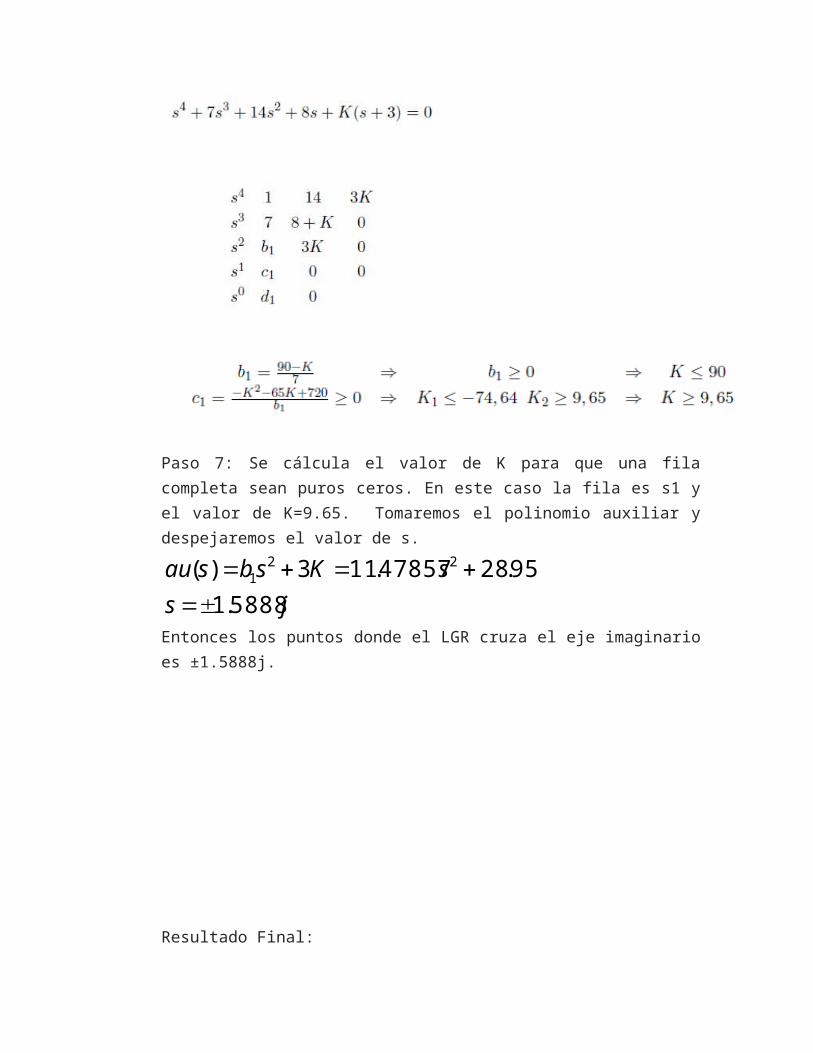
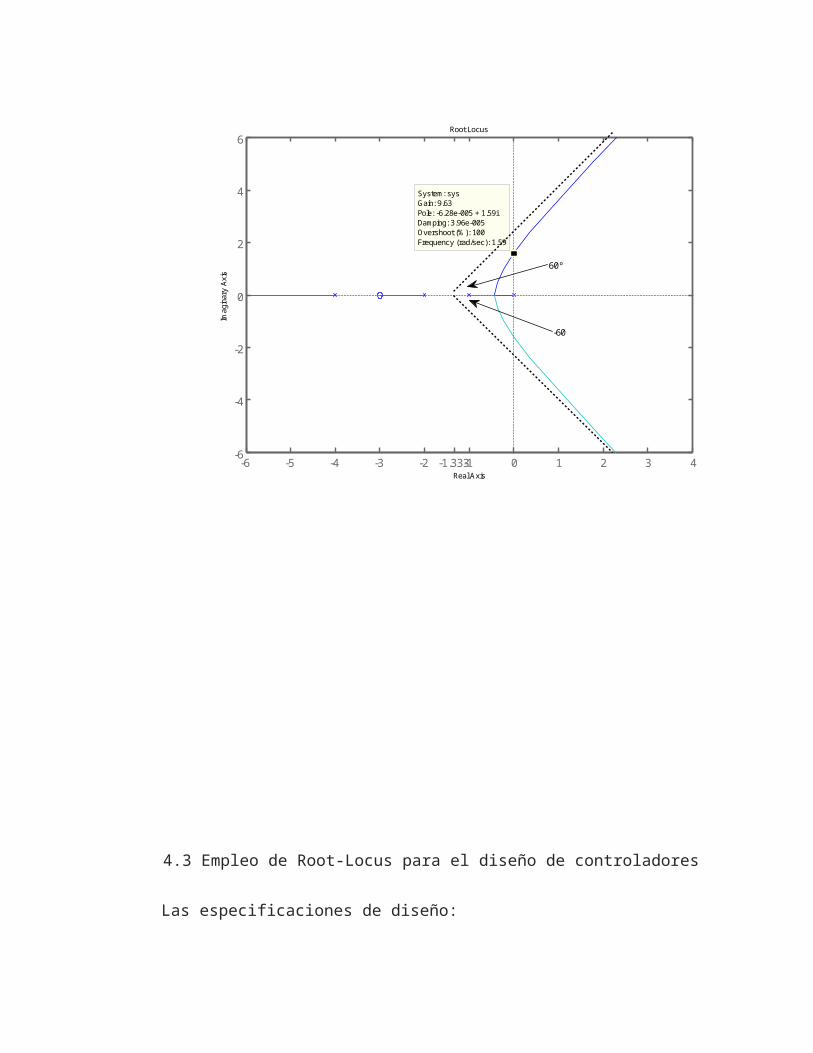
Paso 7: Se cálcula el valor de K para que una fila completa sean puros ceros. En este caso la fila es s1 y el valor de K=9.65. Tomaremos el polinomio auxiliar y despejaremos el valor de s.
js
sKsbsau
5888.1
95.2847857.113)( 221
Entonces los puntos donde el LGR cruza el eje imaginario es ±1.5888j.
Resultado Final:
Root Locus
Real Axis
Imag
inar
y A
xis
-6 -5 -4 -3 -2 -1 0 1 2 3 4-1.333-6
-4
-2
0
2
4
6
System: sysGain: 9.63Pole: -6.28e-005 + 1.59iDamping: 3.96e-005Overshoot (%): 100Frequency (rad/sec): 1.59
60º
-60
4.3 Empleo de Root-Locus para el diseño de controladores
Las especificaciones de diseño: Son únicas para una aplicación dada, inclusive, son únicas para un mismo sistema en dos aplicaciones diferentes por ejemplo, un mismo modelo de caldera en dos plantas diferentes. En general son un conjunto de valores específicos de los parámetros ya conocidos en el análisis de sistemas y
pueden ser tanto en el dominio del tiempo como en el dominio de la frecuencia. Es muy común que las especificaciones de diseño se presenten en términos de: Parámetros de la Respuesta Temporal Parámetros de la Respuesta de Frecuencia Estabilidad Marginal o relativa En la teoría de control avanzado se puede incluir sensibilidad a la variación de parámetros (robustez), rechazo a perturbaciones y otros.Diseño de Controladores mediante LGR: El método del lugar geométrico de las raíces es un enfoque gráfico que permite determinar las ubicaciones de todos los polos en lazo cerrado a partir de las ubicaciones de los polos y ceros en lazo abierto conforme algún parámetro (por lo general la ganancia) varía de cero a infinito. En la práctica, una gráfica del lugar geométrico de las raíces de un sistema indica que el desempeño deseado no puede obtenerse con sólo el ajuste de la ganancia (solo acción P). En estos casos, es necesario que el controlador incorpore dinámica, es decir un arreglo de polos y ceros (algoritmos PI, PD y redes de adelanto o atraso de fase). Cuando se diseña un sistema de control que requiera dinámica, se debe modificar los lugares geométricos de las raíces originales insertando un el conjunto de polos y ceros necesarios. Para esto, primero deben comprenderse los efectos de la adición de los polos y/o ceros sobre el lugar geométrico de las raíces.Efectos de la adición de polos. La adición de un polo a la función de transferencia en lazo abierto tiene el efecto de mover el lugar geométrico de las raíces a la derecha, lo cual tiende a disminuir la estabilidad relativa del sistema y a re alentar el asentamiento de la respuesta. LGR original de 1 polo LGR agregando 1 polo LGR agregando 2 polosEfectos de la adición de ceros. La adición de un cero a la función de transferencia en lazo abierto tiene el efecto de mover el lugar geométrico de las raíces hacia la izquierda, con lo cual el sistema tiende a ser más estable, y se acelera el asentamiento de la respuesta. LGR original de 2 polos LGR agregando 1 cero
Consideraciones para el diseño: 1. En sistemas de 2do orden, la respuesta quedará determinada por la naturaleza de los polos en sub, sobre o críticamente amortiguada. 2. La respuesta de cualquier sistema estará gobernada por los polos más cercanos al origen en el plano S o más cercanos al Z=1 en el plano Z (polo dominante).
3. Mientras los polos dominantes están más a la izquierda en el plano S o más cerca del origen en el plano Z, la respuesta del sistema será más rápida y con mayor ancho de banda.
Diseño de Controlador Proporcional: La esencia del diseño con LGR es en la mayoría de los casos, mover los polos de la EC hacia un lugar tal que el desempeño del sistema sea mejor. Para lograr esto existen muchas formas, pero la más sencilla es agregar una ganancia K en la cadena directa del sistema en Lazo Cerrado (Algoritmo P). Al incorporar una simple ganancia es posible mover los polos hacia los lugares deseados, de esta forma el diseño se reduce a encontrar el exacto valor de K (o el rango) que mueva los polos lo más cerca posible de la ubicación deseada.
4.5 CompensaciónLa compensación es la modificación de la dinámica de un sistema, realizada para satisfacer las especificaciones determinadas.Especificaciones de desempeño. Los sistemas de control se diseñan para realizar tareas específicas. Los requerimientos impuestos sobre el sistema de control se detallan como especificaciones de desempeño. Por lo general se refieren a la precisión, la estabilidad relativa y a la velocidad de respuesta.Por lo general, las especificaciones de desempeño no deben ser más rigurosas de lo necesario para efectuar la tarea definida. Si la precisión de una operación de un estado estable es de importancia vital para un determinado sistema de control, no debemos solicitar especificaciones de desempeño más rígidas de lo necesario sobre la respuesta transitoria, dado que tales especificaciones requerirían de componentes costosos. Compensadores. Si se necesita un compensador para cumplir las especificaciones de desempeño, el diseñador debe plantear un dispositivo físico que tenga prescrita la función de transferencia del compensador.Entre los muchos tipos de compensadores, los de mayor uso son los compensadores de adelanto, los de atraso, los de atraso-adelanto y los de realimentación de velocidad (tacómetros).Los compensadores de adelanto, de atraso y de atraso-adelanto pueden ser dispositivos electrónicos tales como circuitos que usen amplificadores
operacionales, redes RC eléctricas, mecánicas, neumáticas, hidráulicas o una combinación de ellas, o, amplificadores.En el diseño real de un sistema de control, el que se use un compensador electrónico, neumático o hidráulico debe decidirse parcialmente con base en la naturaleza de la planta que se controla. Procedimientos de diseño. En el enfoque de prueba y error para el diseño de un sistema, se prepara un modelo matemático del sistema de control y se ajustan los parámetros de un compensador.Una vez obtenido un modelo matemático satisfactorio, el diseñador debe construir un prototipo y probar el sistema en lazo abierto. Si se asegura la estabilidad absoluta en lazo abierto, el diseñador cierra el lazo y prueba el desempeño del sistema en lazo cerrado resultante.Al desarrollar un sistema de control, sabemos que la modificación adecuada de la dinámica de la planta puede ser una forma sencilla de cumplir las especificaciones de desempeño. Sin embargo, tal vez esto no sea posible en muchas situaciones prácticas, debido a que la planta esté fija y no pueda modificarse. En este caso, deben ajustarse parámetros diferentes a los que tiene la planta fija. Aquí en este trabajo solo supondremos que la planta está definida y es inalterable.Por tanto, los problemas de diseño son aquellos que implican la mejora del desempeño de un sistema mediante la inserción de un compensador. La compensación de un sistema de control se reduce al diseño de un filtro cuyas características tiendan a compensar las características inconvenientes o inalterables de la planta. Nuestro análisis se limita a los compensadores en tiempo continuo. Enfoque del lugar geométrico de las raíces para el diseño de un sistema de control. El método del LGR es un enfoque gráfico que permite determinar las ubicaciones de todos los polos en lazo cerrado a partir de la ubicaciones de los polos y ceros en lazo abierto conforme algún parámetro (por lo general la ganancia) varía de cero a infinito. El método produce un indicio claro de los efectos del ajuste del parámetro.En la práctica, una gráfica de LGR de un sistema indica que el desempeño deseado no puede obtenerse con sólo el ajuste de la ganancia. De hecho,
en algunos casos, tal vez el sistema no sea estable para todos los valores de ganancia. En este caso, es necesario volver a construir los lugares geométricos de la raíces para cumplir con las especificaciones de desempeño. COMPENSACION DE ADELANTO Existen muchas formas de obtener compensadores de adelanto en tiempo continuo, tales como redes electrónicas que usan amplificadores operacionales, redes RC eléctricas y sistemas de amortiguadores mecánicos. La figura muestra un circuito electrónico que usa amplificadores
operacionales que consiste en una red de adelanto si y en una
red de atraso si .
COMPENSACION DE ATRASO La configuración del compensador de atraso electrónico usando amplificadores operacionales es la misma que la del compensador de
adelanto eligiendo en el circuito de la figura anterior. COMPENSACION DE ATRASO-ADELANTO La compensación de adelanto básicamente acelera la respuesta e incrementa la estabilidad del sistema. La compensación de atraso mejora la precisión de estado estable del sistema, pero reduce la velocidad de la respuesta.Si se desea mejorar tanto la respuesta transitoria como la respuesta de estado estable, debe usarse en forma simultánea un compensador de
adelanto y un compensador de atraso. Sin embargo, en lugar de introducir un compensador de adelanto y un compensador de atraso, ambos como elementos separados, es más económico sólo usar un compensador de atraso-adelanto.La compensación de atraso-adelanto combina las ventajas de las compensaciones de atraso y adelanto. Dado que el compensador de atraso-adelanto posee dos polos y dos ceros, tal compensación aumenta en dos el orden del sistema, a menos que ocurra una cancelación de polos y ceros en el sistema compensado. La figura muestra un compensador electrónico de atraso-adelanto que usa amplificadores operacionales.
Red de atraso-adelanto. Inversor de signo. TECNICAS DE COMPENSACION DE ADELANTO BASADAS EN EL ENFOQUE DEL LUGAR GEOMETRICO DE LAS RAICES El enfoque del lugar geométrico de las raíces es muy poderoso en el diseño cuando se incorporan las especificaciones en términos de las cantidades en el dominio del tiempo, tales como el factor de amortiguamiento relativo y la frecuencia natural no amortiguada de los polos dominantes en lazo cerrado, el sobrepaso máximo, el tiempo de levantamiento y el tiempo de asentamiento.Considere un problema de diseño tal que el sistema original sea inestable para todos los valores de ganancia o estable pero con características inconvenientes de la respuesta transitoria. En este caso, es necesario volver a construir el lugar geométrico de las raíces en la vecindad amplia
del eje y el origen para que los polos dominantes en lazo cerrado estén
en las posiciones deseadas en el plano complejo. Este problema se soluciona insertando un compensador de adelanto apropiado en cascada con la función de transferencia de la trayectoria directa.Los procedimientos para diseñar un compensador de adelanto para el sistema que se muestra mediante el lugar geométrico de las raíces se plantean del modo siguiente:
A partir de las especificaciones de desempeño, determine la ubicación deseada para los polos dominantes en lazo cerrado.Por medio de una gráfica del lugar geométrico de las raíces, compruebe si el ajuste de la ganancia puede o no por sí solo producir los polos en lazo
cerrado convenientes. Si no, calcule la deficiencia del ángulo . Este ángulo debe ser una contribución del compensador de adelanto si el nuevo lugar geométrico de las raíces va a pasar por las ubicaciones deseadas para los polos dominantes en lazo cerrado.
Suponga que el compensador de adelanto es:
En donde y se determinan a partir de la diferencia del ángulo. Se determina a partir del requerimiento de la ganancia en lazo abierto.Si no se especifican las constantes de error estático, determine la ubicación del polo y del cero del compensador de adelanto, para que el compensador
de adelanto contribuya al ángulo necesario. Si no se imponen otros requerimientos sobre el sistema, intente aumentar lo más posible el valor de . Un valor mas grande de por lo general produce un valor más
grande de , lo cual es conveniente. (Si se especifica una constante de error estático, por lo general es más sencillo usar el enfoque de la respuesta en frecuencia).Determine la ganancia en lazo abierto del sistema compensado a partir de la condición de magnitud. Una vez diseñado un compensador, verifique que se hayan cumplido todas las especificaciones de desempeño. Si el sistema no cumple las
especificaciones de desempeño, repita el procedimiento de diseño ajustando el polo y el cero del compensador hasta cumplir con todas las especificaciones. Si se requiere de constante de error estático grande, enlace en cascada una red de atraso o convierta el compensador de adelanto en un compensador de atraso-adelanto.Observe que, si los polos dominantes en lazo cerrado seleccionados no son realmente dominantes, será necesario modificar la ubicación del par de polos dominantes en lazo cerrado seleccionados. Considere el sistema de la figura siguiente en donde la FDT de la trayectoria directa es:
La función de transferencia en lazo cerrado se convierte en:
Los polos en lazo cerrado se ubican en: El factor de amortiguamiento relativo de los polos en lazo cerrado es 0.5. La frecuencia natural no amortiguada de los polos en lazo cerrado es 2rad/seg. La constante de error estática de velocidad es 2 seg-1.Se pretenden modificar los polos en lazo cerrado para obtener la frecuencia
natural no amortiguada sin cambiar el valor del factor de
amortiguamiento relativo, Tenga en cuenta que, en el plano complejo, el factor de amortiguamiento
relativo de un par de polos complejos conjugados se expresa en términos
del ángulo , que se mide a partir del eje , con . El factor de amortiguamiento relativo determina la ubicación angular de los polos, en tanto que la distancia del polo al origen la determina la frecuencia
natural no amortiguada . En el ejemplo actual, las ubicaciones deseadas
de los polos en lazo cerrado son .Después de obtenidos los lugares geométricos de las raíces del sistema original, los polos dominantes en lazo cerrado se mueven a la ubicación
deseada con un simple ajuste de la ganancia. Sin embargo, esto no ocurre en el sistema actual. Por tanto, insertaremos un compensador de adelanto en la trayectoria directa. El siguiente es un procedimiento general para determinar el compensador de adelanto: primero, encuentre la suma de los ángulos en la ubicación deseada de uno de los polos dominantes en lazo cerrado con los polos y ceros en lazo abierto del sistema original, y determine el ángulo
necesario que se va a agregar para que la suma total de los ángulos sea
igual a . El compensador de adelanto debe contribuir a este
ángulo .El paso siguiente es determinar las ubicaciones del cero y el polo del compensador de adelanto.
Podemos colocar el cero del compensador en y el polo en para que la contribución del ángulo del compensador de adelanto sea de 30o. (En este caso, el cero del compensador de adelanto cancelará un polo de la planta, produciendo un sistema de segundo orden, en lugar del sistema de tercer orden que hemos diseñado.)
En el sistema actual, el ángulo de del polo en lazo cerrado deseado es:
Por tanto, si necesitamos obligar al lugar geométrico de las raíces a que pase por el polo en lazo cerrado deseado, el compensador de adelanto
debe contribuir con en este punto.Determinamos el cero y el polo del compensador de adelanto como:
Cero en Polo en o bien
Por tanto . La función de transferencia en lazo abierto del sistema
se convierte en:
En dónde . La ganancia se calcula a partir de la condición de
magnitud del modo siguiente: o bien

Con lo cual se deduce que:
La constante del compensador de adelanto es:
Por tanto . En este caso, el compensador de adelanto tiene la
función de transferencia Si el circuito electrónico con amplificadores operacionales se usa como el compensador de adelanto que se acaba de diseñar, los valores de parámetro del compensador de adelanto se determinan a partir de:
Tal como se aprecia en la figura, en donde hemos elegido
arbitrariamente y .
La constante de error estático de velocidad se obtiene a partir de la expresión:
Observe que el tercer polo en lazo cerrado del sistema diseñado se obtiene si se divide la ecuación característica entre los factores conocidos, del modo siguiente:
El método de compensación anterior nos permite colocar los polos dominantes en lazo cerrado en los puntos deseados del plano complejo. El
tercer polo en está cerca del cero agregado en . Por tanto, el efecto de este polo sobre la respuesta transitoria es relativamente pequeño. Dado que no se ha impuesto una restricción sobre el polo no dominante y
no se ha definido una especificación relacionada con el valor del coeficiente estático de velocidad, concluimos que el diseño actual es satisfactorio. A continuación examinaremos las respuestas escalón unitario de los sistemas compensados y no compensados con MATLAB.La función de transferencia en lazo cerrado del sistema compensado es:
En este caso, numc=[0 0 18.7 54.23] denc=[1 7.4 29.5 54.23] Para el sistema no compensado, la función de transferencia en lazo cerrado es:
Por tanto. num=[0 0 4] den=[1 2 4] numc=[0 0 18.7 54.23];denc=[1 7.4 29.5 54.23];num=[0 0 4];den=[1 2 4];t=0:0.05:5;[c1,x1,t]=step(numc,denc,t);[c2,x2,t]=step(num,den,t);plot(t,c1,t,c1,'o',t,c2,t,c2,'x')gridtitle('Respuestas escalón unitario de los sistemas compensado y no compensado')xlabel('t Seg')ylabel('Salidas c1 y c2')text(0.6,1.32,'Sistema compensado')text(1.3,0.68,'Sistema no compensado')
TECNICAS DE COMPENSACION DE ATRASO BASADAS EN EL ENFOQUE DEL LUGAR GEOMETRICO DE LAS RAICES El procedimiento para diseñar compensadores de atraso para el sistema de la figura mediante el método del lugar geométrico de las raíces se plantea del modo siguiente:
Suponga que la función de transferencia del compensador de atraso es:
Así, la función de transferencia en lazo abierto del sistema compensado se
convierte en . METODO DE NYQUIST PARA DETERMINAR LA ESTABILIDAD DE UN SISTEMA
Si la trayectoria de Nyquist en el plano encierra ceros y polos
de y no pasa por los polos ni los ceros de conforme un punto representativo se mueve en sentido de las manecillas del reloj a lo largo de la trayectoria de Nyquist, el contorno correspondiente
en el plano encierra en un círculo veces el
punto en sentido de las manecillas del reloj. (Los valores negativos
de implican encierros en sentido contrario de las manecillas del reloj). Al examinar la estabilidad de los sistemas de control lineales mediante el criterio de estabilidad de Nyquist, vemos que se pueden presentar tres posibilidades.
1. El punto no está encerrado. Esto implica que el sistema es
estable si no hay polos de en el semiplano derecho del plano ; de lo contrario, el sistema es inestable.
2. El punto queda encerrado una o varias veces en sentido contrario de las manecillas del reloj. En este caso, el sistema es estable si la cantidad de encierros en sentido contrario de las manecillas del reloj es
igual a la cantidad de polos en el semiplano derecho del plano ; de lo contrario, el sistema es inestable.
3. El punto queda encerrado una o varias veces en sentido de las manecillas del reloj. En este caso el sistema es inestable. Criterio de estabilidad de Nyquist: [Para un caso especial
cuando no tiene polos ni ceros sobre el eje . En el sistema de la figura, si la función de transferencia en lazo
abierto tiene polos en el semiplano derecho del plano
y constante, para la estabilidad, el lugar geométrico
, conforme varia de a , debe encerrar veces el
punto en sentido contrario a las manecillas del reloj.
Este criterio se expresa como en donde:
Al número de ceros de en el semiplano derecho del plano .
Al número de encierros en el sentido de las manecillas del reloj del
punto .
Al número de polos de en el semiplano derecho del plano .
Si no es cero, para un sistema de control estable, debemos tener
o , lo cual significa que debemos tener encierros del
punto en el sentido de las manecillas del reloj.
Si no tiene polos en el semiplano derecho del plano , entonces
. Por tanto, para la estabilidad no se debe encerrar el punto
mediante el lugar geométrico . En este caso no es necesario
considerar el lugar geométrico para el eje completo, sino sólo para la parte de frecuencia positiva. La estabilidad de este sistema se determina
observando si el punto se encierra mediante la traza de Nyquist de
.Debe tenerse cuidado en el momento de probar la estabilidad de sistemas multilazo, dado que pueden incluir polos en el semiplano derecho del plano
. Una simple revisión de los encierros del punto mediante el lugar
geométrico no es suficiente para detectar la inestabilidad en los sistemas multilazo. Sin embargo, en tales casos, si un polo
de está en el semiplano derecho del plano , se determina con facilidad aplicando el criterio de estabilidad de Routh al denominador de
.
Si el lugar geométrico de pasa por el punto , entonces los ceros de la ecuación característica, o los polos en lazo cerrado, se
ubican sobre el eje Esto no es conveniente para sistemas de control prácticos. Para un sistema en lazo cerrado bien diseñado, ninguna de las
raíces de la ecuación característica debe encontrarse sobre el eje. .
Criterio de estabilidad de Nyquist: [Para un caso general cuando
tiene polos y/o ceros sobre el eje. Para la misma figura, si la función de transferencia en lazo
abierto tiene polos en el semiplano derecho del plano , para
ser estable, el lugar geométrico debe encerrar veces el punto
en sentido contrario a las manecillas del reloj, conforme un punto representativo se traza en la trayectoria de Nyquist modificada en sentido de las manecillas del reloj.
5 INTRODUCCIÓN AL CONTROL DIGITAL5.1 CONTROL DIGITAL
Sistemas de control en tiempo discreto El control de procesos con una computadora digital es cada vez más común. Esto se debe principalmente a: Mejor manejo del ruido en las señales digitales. Generalmente el gasto de energía del controlador digital es menor. La disponibilidad de computadoras digitales de bajo costo. La gran flexibilidad en los programas de control. No solo los sistemas complejos sino también algunos sencillos como los enseres domésticos son controlados por medio de control digital. La tendencia actual es utilizar el control digital en lugar del control analógico, donde sea posible y viable. El uso de la computadora digital para realizar la optimización a partir de criterios bien definidos. Utilizando el mínimo de energía posible y el máximo de flexibilidad y economía.Las dos áreas más importantes de aplicación de los sistemas digitales de control son: Las pasivas, donde la mayoría de los datos adquiridos del proceso son solamente manipulados por una computadora digital para propósitos de monitoreo, alarmas reportes de producción, etc., y Las activas, donde la computadora está involucrada directamente en el control del proceso. (Entre un 20 y un 30% de las mediciones son usadas para control). Estructura de un controlador digitalComputadora digital. Es donde se realiza la manipulación numérica necesaria para proveer un algoritmo de control. Es el “cerebro” del controlador digital. Recibe una señal codificada del A/D, realiza cálculos y ofrece una acción de control con datos codificados que posteriormente se transforman en una señal física adecuada al sistema. Convertidor digital-analógico (D/A). Es un dispositivo que convierte una señal digital a una señal analógica. La señal de codificada proveniente del controlador digital se transforma en una señal física propicia para su utilización en el sistema.Circuito retenedor. La señal física del convertidor D/A generalmente muestra una serie de discontinuidades, el circuito retenedor se encarga de “suavizarlas” generando una señal menos discontinua y más adecuada para el sistema a controlar. El retenedor más popular en sistemas de
control es el retenedor de orden cero, el cual solo mantiene el valor constante hasta el próximo valor de la señal del D/A.Actuador. La señal de salida del retenedor en su gran mayoría no es una señal adecuada para ser introducida al sistema. Ya sea por la cantidad de potencia requerida o por el tipo de variable de entrada al sistema. El actuador es la unión final entre la señal de control y el sistema a controlar. En este caso, es el encargado de manipular la variable física de entrada al sistema por medio de la acción de control que viene desde el controlador digital.Planta o proceso. Es el sujeto a ser controlado. Generalmente un conjunto de partes que funcionan de manera conjunta para llevar a cabo un objetivo común. Es de naturaleza “analógica”. Transductor. Es un dispositivo que convierte una señal de entrada a otra señal de naturaleza diferente. En este esquema, se utiliza para transformar la señal de salida del sistema a controlar en una señal adecuada para ser introducida al algoritmo de control. Tipo de señales continúas en el tiempo. Son señales definidas sobre un rango continuo de tiempo, la amplitud puede asumir un rango continuo de valores o un número finito de distintos valores. Señales analógicas. Están definidas sobre un rango continuo de tiempo y un rango continuo de amplitud. Señales continuas en el tiempo y cuantiadas en amplitud. Es una señal definida sobre un rango continuo de tiempo con un conjunto de valores finitos en la amplitud.