algorithms for solar active region identification and tracking michael turmon jpl/caltech work with...
TRANSCRIPT
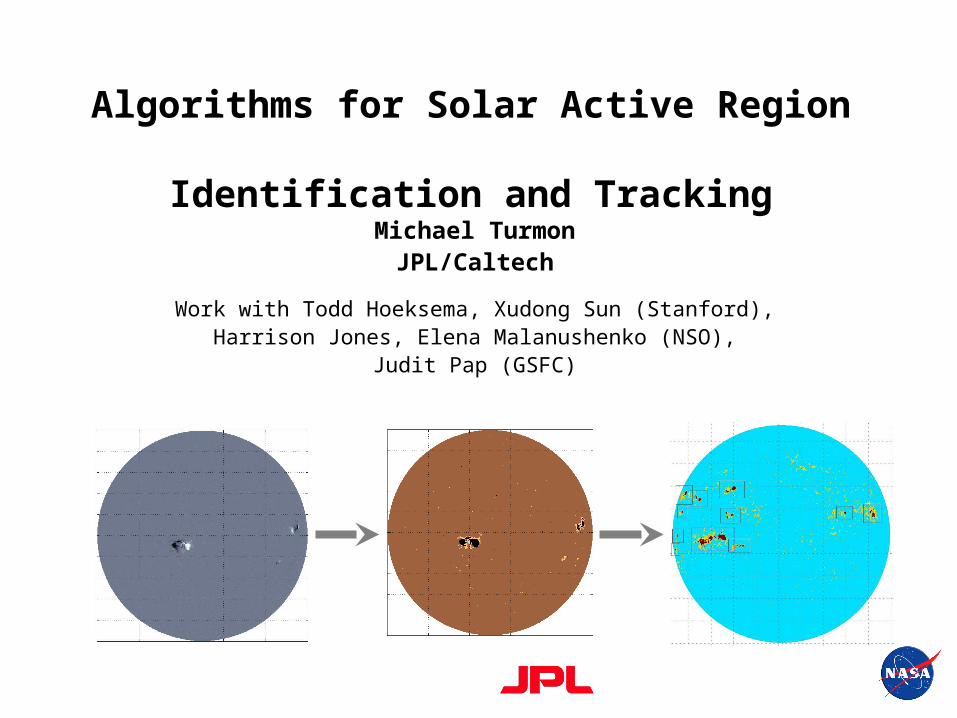
Algorithms for Solar Active Region Identification and Tracking
Michael TurmonJPL/Caltech
Work with Todd Hoeksema, Xudong Sun (Stanford),Harrison Jones, Elena Malanushenko (NSO),
Judit Pap (GSFC)
2
Capabilities Discussed Here
Identification– Label active pixels in multivariate images, e.g.: (LOS B, Ic)– There exists a family of methods by many researchers– Largely a solved problem for active regions in photosphere– Bayesian approach maximizing posterior probability of labeling
• Has been released for HMI on jsoc.stanford.edu
Tracking– Grouping of active pixels in labeling into ARs– Then, link identified ARs through a series of images– Single-link most likely tracker (optimization-based association)– Nearing release for HMI as hmi.Mharp_720s
Motivation
• Identification: Find objects in multispectral images
• Tracking: Link identified objects across a series of images
• Object Analysis: Model and classify object tracks
Move beyond looking at pixels to understanding phenomena
Identification
Allow scientists in to understand great volumes of spatio-temporal data in directly informative terms
Tracking Object analysis
4
Identification
5
Identification: Finding the Best Labeling
• Bayesian approach: maximize posterior probability having two terms– Trade off fidelity to data (first term) vs. spatial coherence (second)
• Likelihood: Probability of a certain observed (field, intensity) given activity type: e.g., quiet Sun, facula, sunspot– Gaussian mixture model to parameterize each conditional density
• Prior: Enforces spatial smoothness of labeling to disambiguate cases near the class boundary– Nearby-neighbor smoothness via Markov random field (MRF) model
• Find mask via discrete optimization of posterior w.r.t. entire labeling
log Pr(class mask | obs. images) = constant + log Pr(obs. images | class mask) + log Pr(class mask)
6
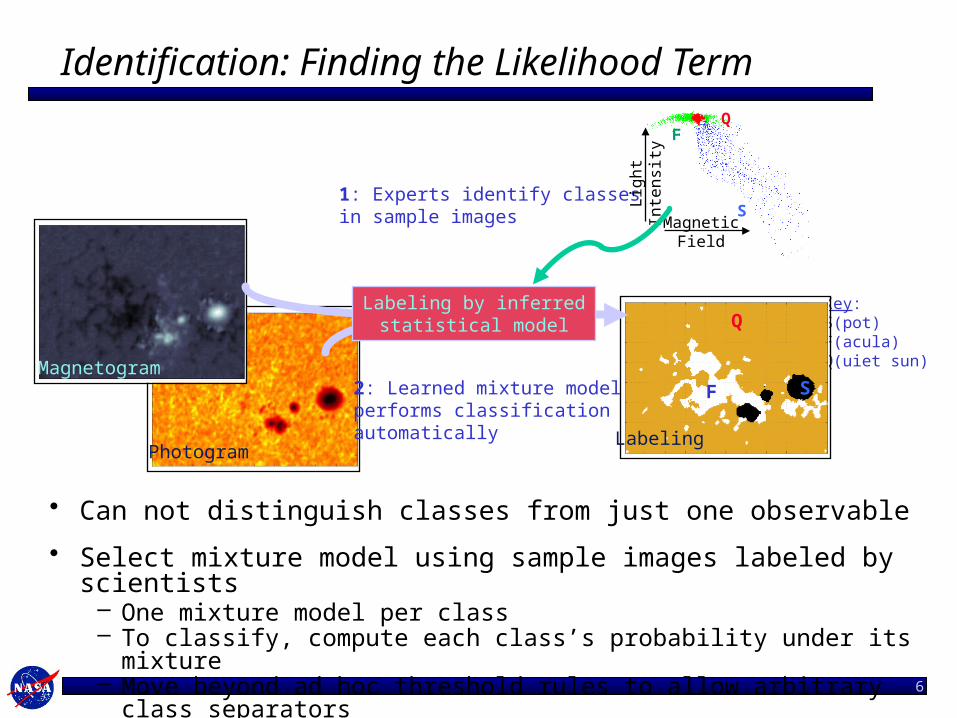
Photogram
Magnetogram
SNQ
Key:S(pot)F(acula)Q(uiet sun)
S
FQ
1: Experts identify classesin sample images
2: Learned mixture model performs classification automatically
MagneticField
Light
Intensity
Labeling
Labeling by inferredstatistical model Q
SF
Identification: Finding the Likelihood Term
• Can not distinguish classes from just one observable
• Select mixture model using sample images labeled by scientists– One mixture model per class– To classify, compute each class’s probability under its mixture– Move beyond ad hoc threshold rules to allow arbitrary class separators
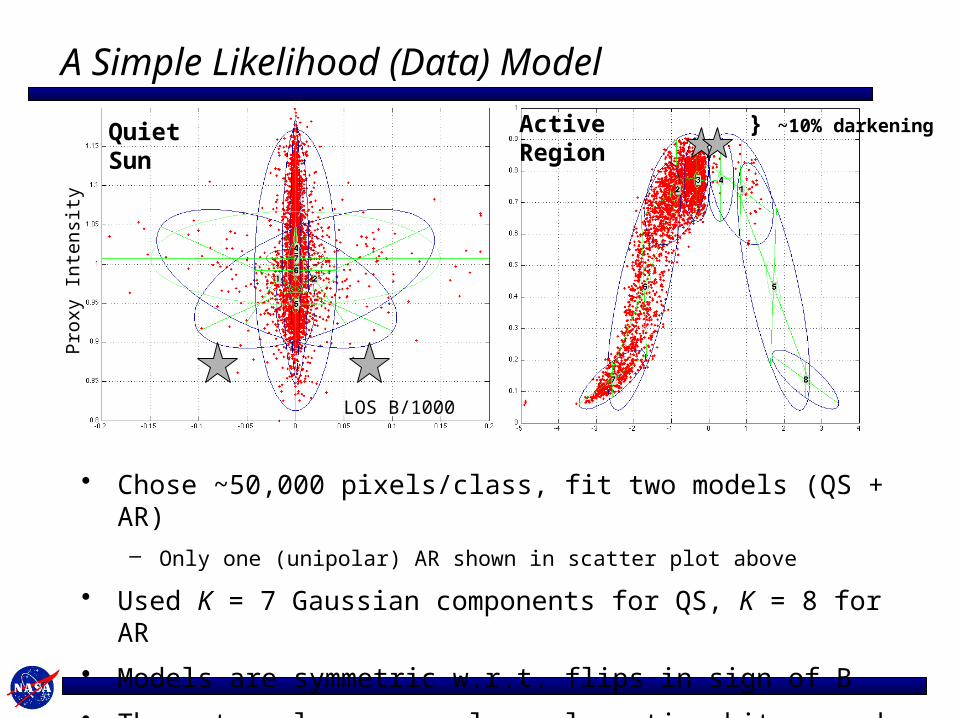
A Simple Likelihood (Data) Model
• Chose ~50,000 pixels/class, fit two models (QS + AR)– Only one (unipolar) AR shown in scatter plot above
• Used K = 7 Gaussian components for QS, K = 8 for AR
• Models are symmetric w.r.t. flips in sign of B
• These two classes overlap only a tiny bit around the stars
QuietSun
Active Region
LOS B/1000
Pro
xy I
nte
nsi
ty
} ~10% darkening
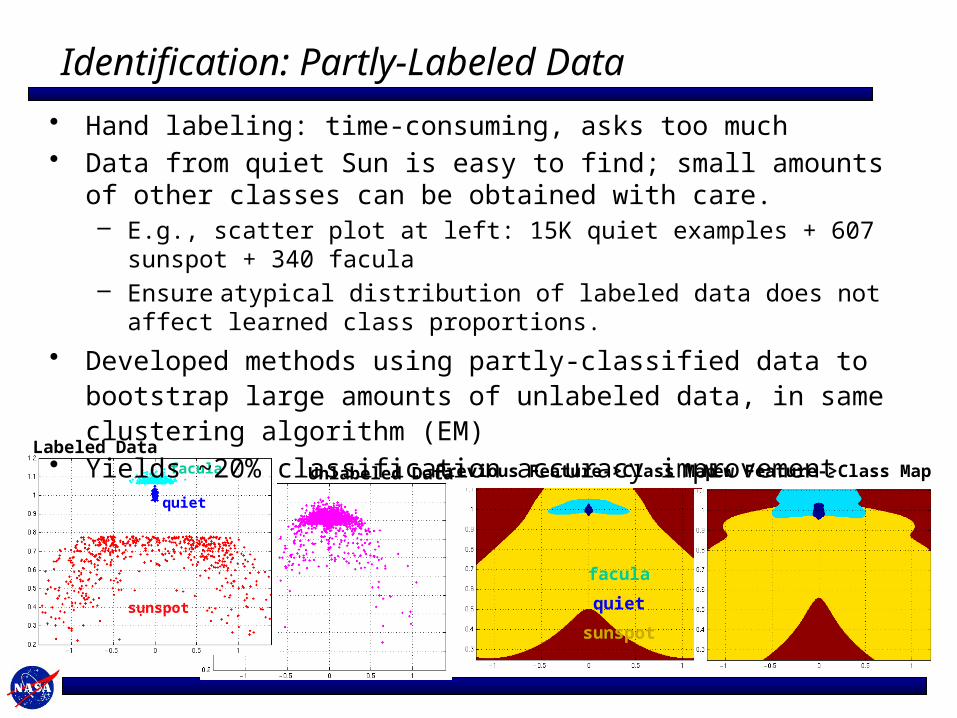
Unlabeled Data
Labeled Data
sunspot
quiet
facula
facula
quiet
sunspot
Previous Feature->Class Map New Feature->Class Map
Identification: Partly-Labeled Data
• Hand labeling: time-consuming, asks too much• Data from quiet Sun is easy to find; small amounts of other classes can
be obtained with care.– E.g., scatter plot at left: 15K quiet examples + 607 sunspot + 340 facula– Ensure atypical distribution of labeled data does not affect learned class
proportions.
• Developed methods using partly-classified data to bootstrap large amounts of unlabeled data, in same clustering algorithm (EM)
• Yields ~20% classification accuracy improvement
9
• Data model should be invariant to the sign of LOS B
• Distributional constraint, for 2d observation y:
• For a normal mixture M, like our class-conditional likelihoods, the constraint implies:
• Modify EM to respect this constraint: Average sufficient statistics over the cyclic groups associated with A.
Refinement: Symmetry in LOS B
10
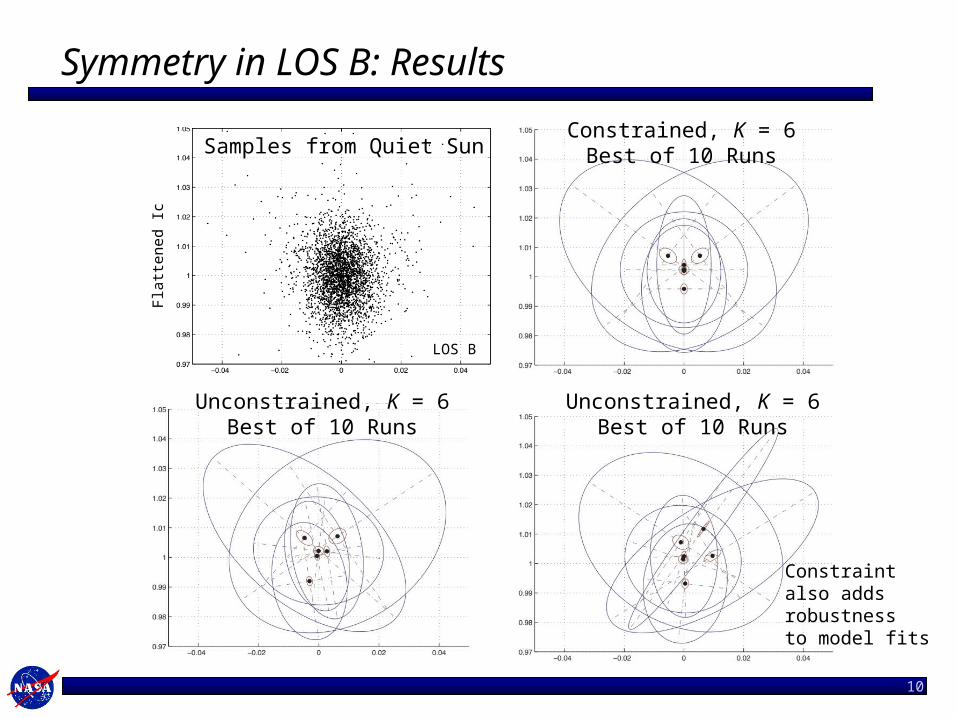
Symmetry in LOS B: Results
Constraintalso addsrobustnessto model fits
Constrained, K = 6Best of 10 Runs
Unconstrained, K = 6Best of 10 Runs
Unconstrained, K = 6Best of 10 Runs
LOS B
Fla
tten
ed I
cSamples from Quiet Sun
11
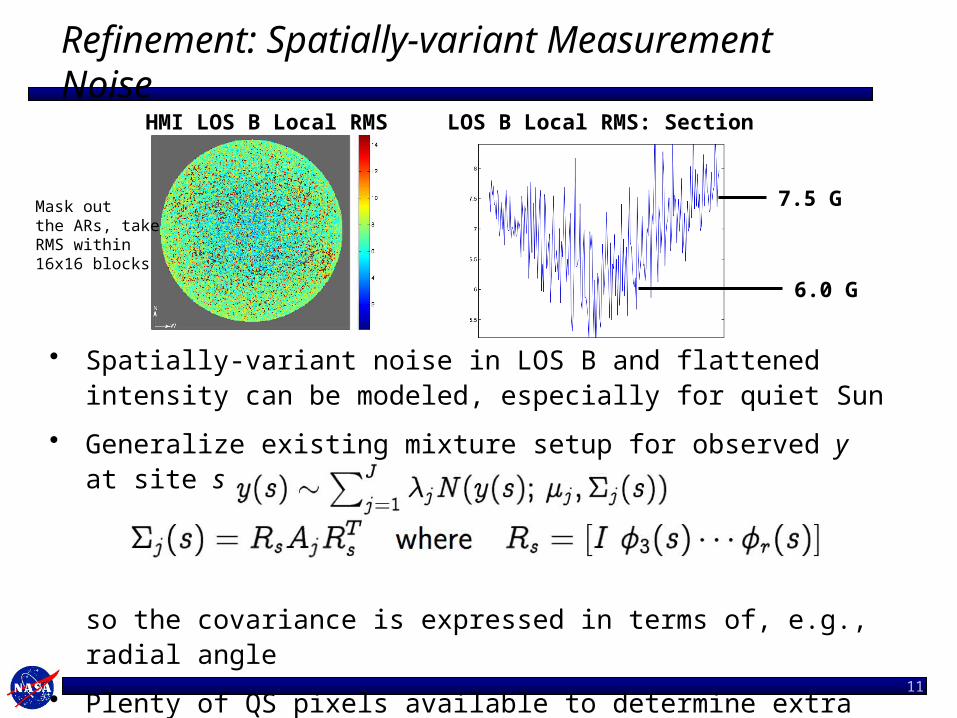
Refinement: Spatially-variant Measurement Noise
• Spatially-variant noise in LOS B and flattened intensity can be modeled, especially for quiet Sun
• Generalize existing mixture setup for observed y at site s:
so the covariance is expressed in terms of, e.g., radial angle
• Plenty of QS pixels available to determine extra parameters in Aj
HMI LOS B Local RMS LOS B Local RMS: Section
Mask outthe ARs, takeRMS within16x16 blocks
7.5 G
6.0 G
12
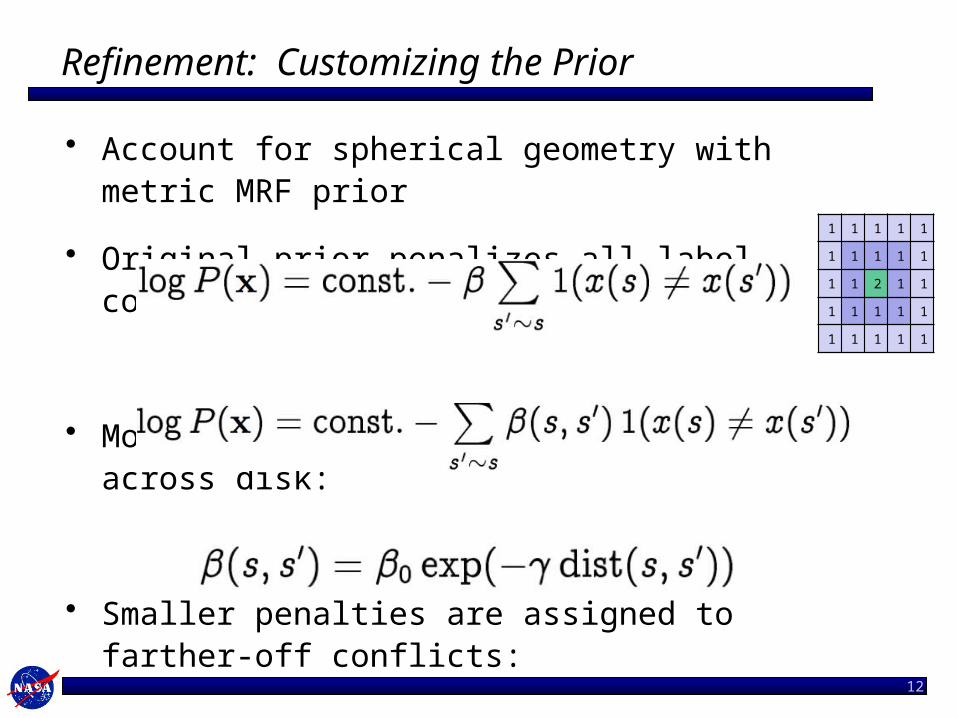
Refinement: Customizing the Prior
• Account for spherical geometry with metric MRF prior
• Original prior penalizes all label-conflicts equally:
• Modified prior penalizes differently across disk:
• Smaller penalties are assigned to farther-off conflicts:
where dist(s, s’) = great-circle distance between sites
1 1 1 1 1
1 1 1 1 1
1 1 2 1 1
1 1 1 1 1
1 1 1 1 1
13
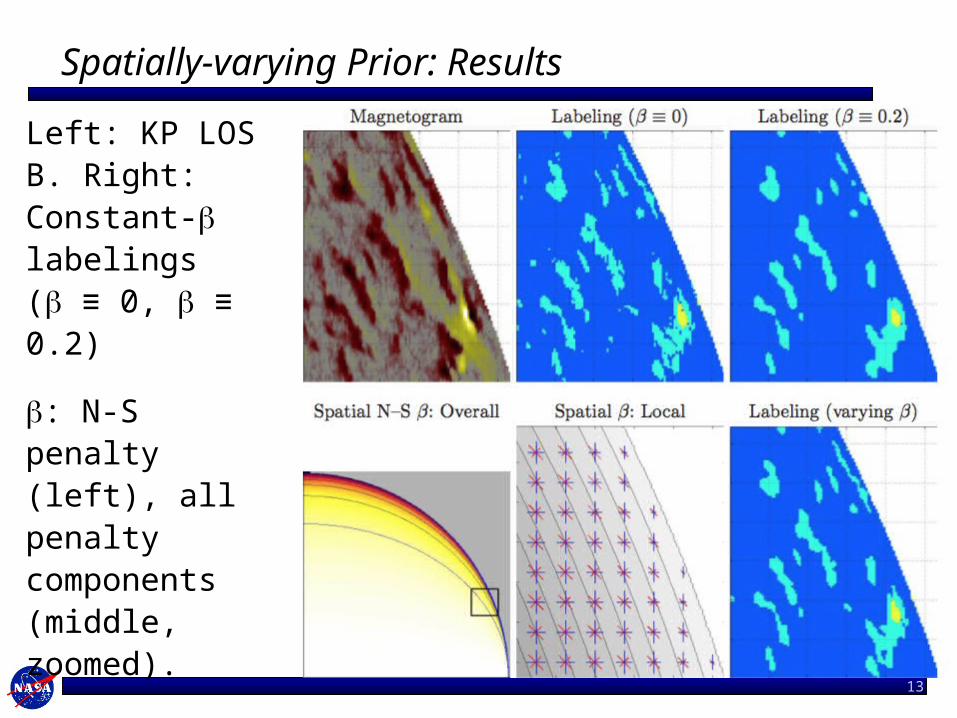
Spatially-varying Prior: Results
Left: KP LOS B. Right: Constant-b labelings(b ≡ 0, b ≡ 0.2)
b: N-S penalty (left), all penalty components (middle, zoomed).
Rightmost: labeling with variable b
14
HMI Identification Status
• Output Masks– Available as hmi.Marmask_720s and hmi.Marmask_720s_nrt– Full-disk 4Kx4K mask images in coordinates of observations– Never re-map observed images to find the mask
• Further Calibration– Calibration team is working on better removal of limb-
darkening and time-dependent flat-field from intensity proxy.– Current HMI region model does not really use the intensity
proxy because of limb artifacts.
• Enhancements– A more detailed class breakdown is possible. – E.g., umbra/penumbra were not reliably determined from MDI;
believe HMI should be better
15
Tracking
16
Components of “Tracking”
• Identification (just discussed)
• Grouping – Group separated features into AR– Formal literature on this is not well-developed– Use a simple template-based method
• Association– Construct 1:1 map from previous AR set to next AR set.
• Chained together, you have a track.– Criterion: maximize cumulative area of overlap– Heuristics to “look harder” for new or dying ARs
• Naming– Link a track to a name like NOAA AR#9077
17
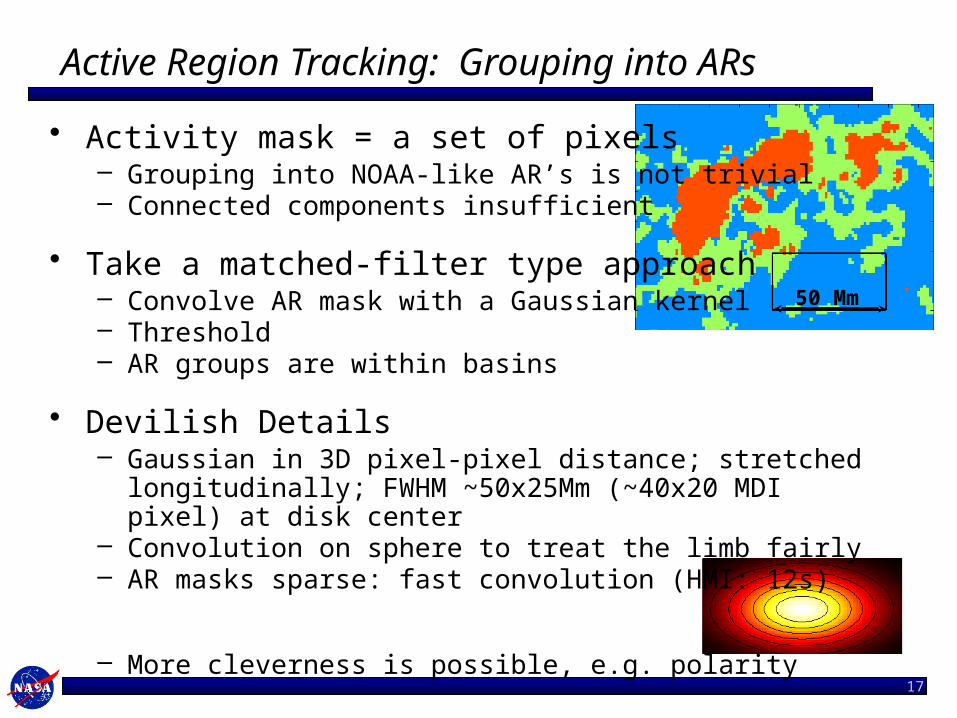
Active Region Tracking: Grouping into ARs
• Activity mask = a set of pixels– Grouping into NOAA-like AR’s is not trivial– Connected components insufficient
• Take a matched-filter type approach– Convolve AR mask with a Gaussian kernel– Threshold– AR groups are within basins
• Devilish Details– Gaussian in 3D pixel-pixel distance; stretched longitudinally;
FWHM ~50x25Mm (~40x20 MDI pixel) at disk center– Convolution on sphere to treat the limb fairly– AR masks sparse: fast convolution (HMI: 12s)
– More cleverness is possible, e.g. polarity
50 Mm
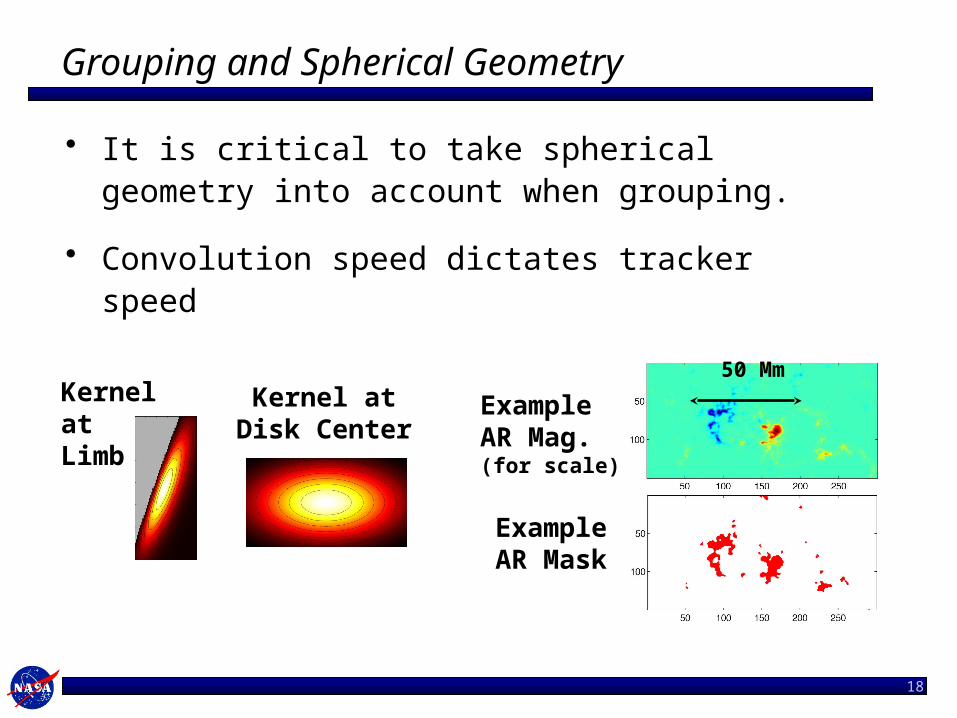
Grouping and Spherical Geometry
• It is critical to take spherical geometry into account when grouping.
• Convolution speed dictates tracker speed
18
Kernel atDisk Center
Kernelat Limb
50 Mm
ExampleAR Mag.(for scale)
ExampleAR Mask
19
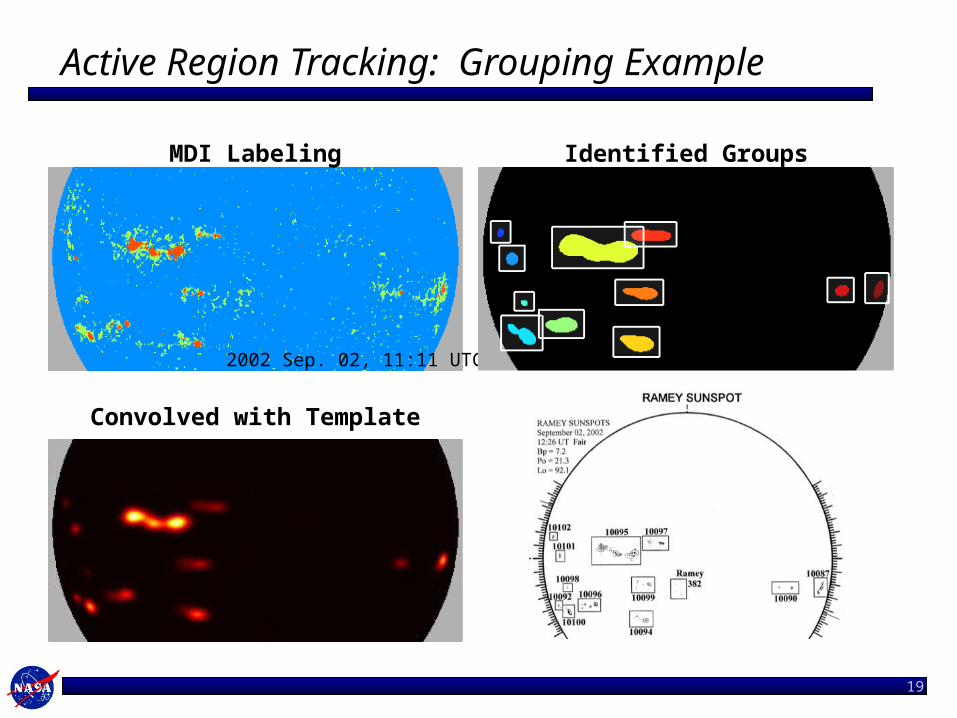
Active Region Tracking: Grouping Example
MDI Labeling
2002 Sep. 02, 11:11 UTC
Convolved with Template
Identified Groups
20
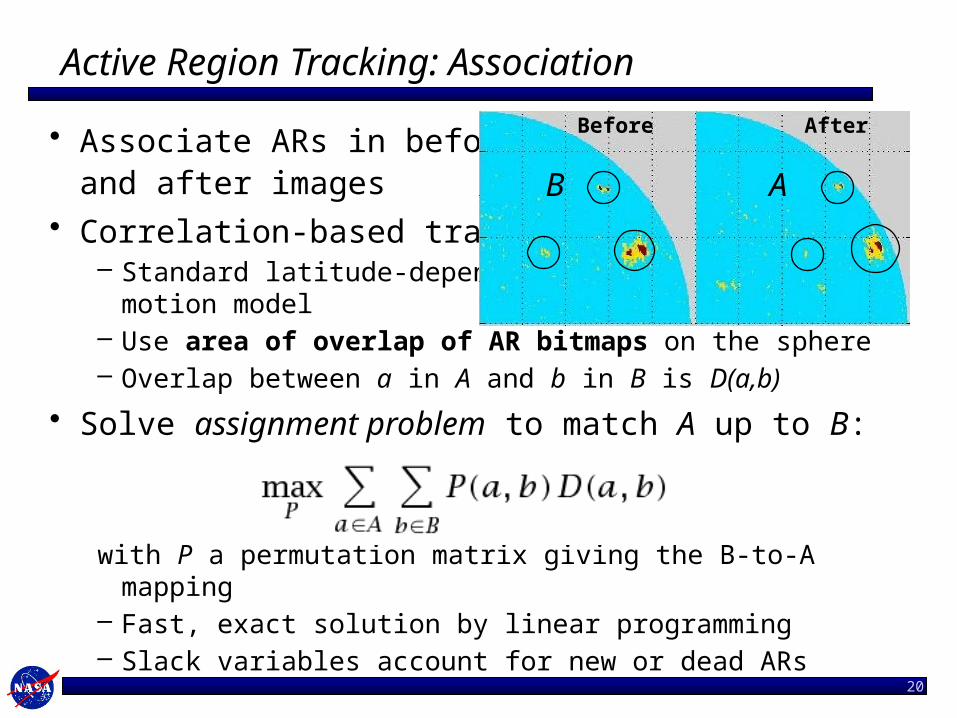
Active Region Tracking: Association
• Associate ARs in beforeand after images
• Correlation-based tracker– Standard latitude-dependent
motion model– Use area of overlap of AR bitmaps on the sphere– Overlap between a in A and b in B is D(a,b)
• Solve assignment problem to match A up to B:
with P a permutation matrix giving the B-to-A mapping– Fast, exact solution by linear programming– Slack variables account for new or dead ARs
AB
Before After
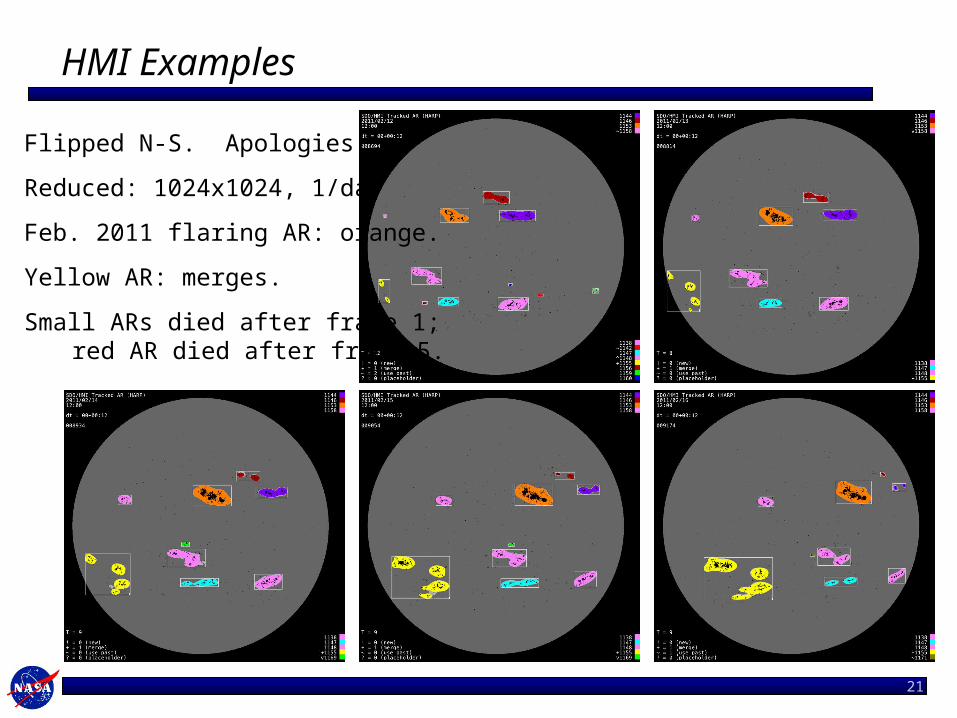
HMI Examples
21
Flipped N-S. Apologies!
Reduced: 1024x1024, 1/day
Feb. 2011 flaring AR: orange.
Yellow AR: merges.
Small ARs died after frame 1;red AR died after frame 5.
22
23
References
M. Turmon, H. Jones, J. Pap, O. Malanushenko, “Statistical feature recognition for multidimensional solar imagery”, Solar Physics, 04/2010.
The mixture modeling work appeared in:
Mixtures-2001, “Recent Developments in Mixture Modelling,” HamburgCompstat-2004, Prague, as “Symmetric Normal Mixtures”
Earlier work:
J. Pap, H. Jones, M. Turmon & L. Floyd, “Study of the SOHO/VIRGO Irradiance Variations using MDI and Kitt Peak images,” Proc. SOHO-11 Workshop, Davos, 2002.
H.P. Jones, M. Turmon, et al. “A comparison of feature classification methods for modeling solar irradiance variation,” 34th COSPAR Scientific Assembly, 2002.
The research described here was carried out in part by the Jet Propulsion Laboratory, California Institute of Technology, under contract with the National Aeronautics and Space Administration. Copyright 2011. All rights reserved. Government sponsorship acknowledged.