algebra liniowa z geometrią 2
TRANSCRIPT

Algebra liniowa z geometrią 2
Maciej Czarnecki
23 maja 2013
Spis treści
5 Geometria płaszczyzny zespolonej 2
6 Macierze 36.1 Działania na macierzach . . . . . . . . . . . . . . . . . . . . . . . 36.2 Wyznacznik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46.3 Rząd macierzy . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76.4 Układy równań liniowych . . . . . . . . . . . . . . . . . . . . . . 8
7 Przestrzenie i przekształcenia afiniczne 87.1 Przestrzeń afiniczna . . . . . . . . . . . . . . . . . . . . . . . . . 87.2 Podprzestrzenie afiniczne . . . . . . . . . . . . . . . . . . . . . . 97.3 Przekształcenia afiniczne . . . . . . . . . . . . . . . . . . . . . . . 9
8 Geometria iloczynu skalarnego 108.1 Norma, kąt i odległość . . . . . . . . . . . . . . . . . . . . . . . . 108.2 Wyznacznik Grama i objętość . . . . . . . . . . . . . . . . . . . . 118.3 Orientacja i iloczyn wektorowy . . . . . . . . . . . . . . . . . . . 14
9 Formy dwuliniowe i kwadratowe 179.1 Postać kanoniczna . . . . . . . . . . . . . . . . . . . . . . . . . . 179.2 Formy rzeczywiste . . . . . . . . . . . . . . . . . . . . . . . . . . 20
10 Endomorfizmy przestrzeni skończonego wymiaru 2310.1 Wektory i wartości własne . . . . . . . . . . . . . . . . . . . . . . 2310.2 Diagonalizacja i postać Jordana . . . . . . . . . . . . . . . . . . . 25
11 Grupy przekształceń i geometrie nieeuklidesowe 2811.1 Grupy i działania grup na przestrzeniach . . . . . . . . . . . . . . 2811.2 Izometrie przestrzeni euklidesowej . . . . . . . . . . . . . . . . . 30
1
5 Geometria płaszczyzny zespolonej
Definicja 5.0.1. Ciałem nazywamy zbiór F składający się z co najmniej dwóchelementów wraz z funkcjami + : F× F→ F oraz · : F× F→ F takimi, że (F,+)jest grupą abelową, 0 — elementem neutralnym działania +, (F \ {0}, ·) jestgrupą abelową oraz a · (b+ c) = (a · b) + (a · c) dla dowolnych a, b, c ∈ F.
Innymi słowy, w zbiorze F określone są funkcje + i · przypisujące dwómelementom ze zbioru F jeden element ze zbioru F spełniające warunki:
(F1) ∀a,b∈F a+ b ∈ F(F2) ∀a,b∈F a · b ∈ F(F3) ∀a,b,c∈F (a+ b) + c = a+ (b+ c)
(F4) ∃0∈F ∀a∈F a+ 0 = 0 + a = a
(F5) ∀a∈F ∃−a∈F a+ (−a) = (−a) + a = 0
(F6) ∀a,b∈F a+ b = b+ a
(F7) ∀a,b∈F\{0} a · b ∈ F \ {0}(F8) ∀a,b,c∈F (a · b) · c = a · (b · c)(F9) ∃1∈F\{0} ∀a∈F a · 1 = 1 · a = a
(F10) ∀a∈F\{0} ∃a−1∈F\{0} a · a−1 = a−1 · a = 1
(F11) ∀a,b∈F a · b = b · a(F12) ∀a,b,c∈F a · (b+ c) = (a · b) + (a · c)
Przykład 5.0.2. Ciałami są R oraz Q ze zwykłymi działaniami dodawania imnożenia.
Stwierdzenie 5.0.3. stw. 4.1
Definicja 5.0.4. def. 4.2
Uwaga 5.0.5. po def. 4.2
Definicja 5.0.6. def. 4.3, 4.4
Wniosek 5.0.7. C jest przestrzenią liniową wymiaru 2 nad ciałem R. Jej baząjest np. układ (1, i).
Definicja 5.0.8. Wielomianem o współczynnikach zespolonych nazywamy nie-skończony cią liczb zespolonych a0, a1, . . ., w którym tylko skończona liczba wy-razów jest różna od 0. Zbiór wszystkich wielomianów o współczynnikach zespo-lonych oznaczamy przez C[z]. Dodawanie i mnożenie wielomianów zespolonychokreśla się tak sama analogicznie do wielomianów rzeczywistych.
Jeżeli n = min{j ; aj 6= 0}, to n nazywamy stopniem wielomianu f =(aj)j∈N∪{0}, a wielomian zapisujemy w postaci f(z) = a0 + a1z + . . .+ anz
n.Liczba zespolona c jest pierwiastkiem wielomianu f , gdy f(c) = 0.
Twierdzenie 5.0.9. (zasadnicze twierdzenie algebry) Każdy wielomian stopniadodatniego o współczynnikach zespolonych ma pierwiastek zespolony.
Wniosek 5.0.10. Kazdy wielomian o współczynnikach zespolonych rozkładasię na czynniki liniowe, tzn. dla wielomianu f(z) = a0 +a1z+. . .+anzn o współ-czynnikach zespolonych, przy czym an 6= 0, n 1, istnieją liczby z1, . . . , zk ∈ Coraz l1, . . . , lk ∈ N spełniające warunek l1 + . . .+ lk = n i takie, że
f(z) = an(z − z1)l1 · . . . · (z − zk)lk .
2

Definicja 5.0.11. def. 4.4
Definicja 5.0.12. def. 4.6
Stwierdzenie 5.0.13. stw. 4.7
Stwierdzenie 5.0.14. stw. 4.5 (1),(5),(6),(7)
Stwierdzenie 5.0.15. stw. 4.8
Definicja 5.0.16. def. 4.9
Twierdzenie 5.0.17. tw. 4.10
Wniosek 5.0.18. wn. 4.11
Definicja 5.0.19. Określmy dla ϕ ∈ R
eiϕ = cosϕ+ i sinϕ.
Stwierdzenie 5.0.20. (wzór Eulera)
eiπ + 1 = 0.
Przykład 5.0.21. Notacja zespolona pozwala na łatwy zapis przekształceńgeometrycznych płaszczyzny:
1. z 7→ z jest symetrią osiową względem osi rzeczywistej,
2. z 7→ eiϕz, gdzie ϕ ∈ R, jest obrotem o kąt ϕ dookoła 0,
3. z 7→ z + b, gdzie b ∈ C jest translacją o wektor b,
4. z 7→ kz, gdzie k ∈ R, k 6= 0, jest jednokładnością o środku 0 i skali k.
Stwierdzenie 5.0.22. 1. Funkcja liniowa C 3 z 7→ az + b ∈ C, gdzie a, b ∈C, a 6= 0, jest złożeniem obrotu, jednokładności i translacji.
2. Funkcja antyliniowa C 3 z 7→ az + b ∈ C, gdzie a, b ∈ C, a 6= 0, jestzłożeniem symetrii osiowej, obrotu, jednokładności i translacji.
6 Macierze
6.1 Działania na macierzach
Definicja 6.1.1. def. 11.1
uwaga 1 po def. 11.1
Definicja 6.1.2. def. 11.3
Definicja 6.1.3. def. 11.4
uwaga 2 po def 11.4
Stwierdzenie 6.1.4. 11.9
Definicja 6.1.5. def. 11.12
3

Wniosek 6.1.6. wn. 11.14
Definicja 6.1.7. def. 11.17
Stwierdzenie 6.1.8. stw. 11.18
Wniosek 6.1.9. wn. 11.19
Definicja 6.1.10. def. 11.20
Stwierdzenie 6.1.11. stw. 11.21
Wniosek 6.1.12. wn. 11.22
6.2 Wyznacznik
Niech dla n ∈ N Sn oznacza zbiór wszystkich permutacji (tzn. bijekcji) zbiorun–elementowego {1, . . . , n}.
Definicja 6.2.1. def. 12.1
Definicja 6.2.2. def. 12.2
Przykład 6.2.3. przykł. 12.3
Stwierdzenie 6.2.4. stw. 12.4
Stwierdzenie 6.2.5. stw. 12.5
Stwierdzenie 6.2.6. stw. 12.6
Twierdzenie 6.2.7. F (Laplace’a) Niech A = [aij ] ∈ Mnn(F ), zaś dla i, j =1, . . . , n symbol Aij oznacza macierz (n−1)×(n−1) powstałą z macierzy A przezskreślenie w niej i−tego wiersza oraz j−tej kolumny. Wówczas dla dowolnegoi = 1, . . . , n zachodzi równość
detA =n∑j=1
(−1)i+jaij detAij .
Określając dla k = 1, . . . , n funkcje tk : {1, . . . , n} \ {k} → {1, . . . , n − 1}wzorami
tk(l) ={l gdy l < kl − 1 gdy l > k
możemy precyzyjnie określić macierz Aij jako[at−1i
(p),t−1j
(q)
]1¬p,q¬n−1
.
Do dowodu twierdzenia Laplace’a potrzebujemy dwóch lematów
Lemat 6.2.8. Jeżeli σ ∈ Sn jest taką permutacją, że σ(i) = j dla pewnychi, j ∈ {1, . . . , n}, to liczba inwersji w ciągu liczb σ̂ = (σ(1), . . . , σ(i − 1), σ(i +1), . . . , σ(n)) ma tę samą parzystość co liczba #inv σ − (i+ j).
Dowód: Jeżeli wśród pierwszych i−1 wyrazów ciągu σ̂ jest dokładnie m 0liczb większych niż j, to jest wśród nich i− 1−m liczb mniejszych niż j. Zatemwśród liczb σ(i+ 1), . . . , σ(n) liczb mniejszych niż j jest dokładnie j − 1− (i−1−m) = j − i+m.
Tym samym w permutacji σ liczba j tworzy j − i + 2m = i + j + 2(m − i)inwersji, więc liczba inwersji w ciągu σ̂ różni się od liczby #inv σ o liczbę i+ joraz pewną liczbę parzystą. �
4

Lemat 6.2.9. Dla ustalonych i, j = 1, . . . , n funkcja Cij przypisująca dowolnejpermutacji σ ze zbioru Zij = {σ ∈ Sn ; σ(i) = j} funkcję
tj ◦ σ|{1,...,n}\{i} ◦ t−1i
jest bijekcją zbioru Zij na zbiór Sn−1.
Dowód: Z definicji funkcji ti, tj i zbioru Zij wynika, że złożenie jest dobrzeokreślone, a funkcja Cij(σ), działająca ze zbioru {1, . . . , n−1} w ten sam zbiór,jest bijekcją jako złożenie trzech bijekcji. Zatem Cij(σ) ∈ Sn−1.
Aby wykazać różnowartościowość Cij weźmy takie σ, τ ∈ Zij , że Cij(σ) =Cij(τ). Wówczas składając obie strony lewostronnie z t−1
j i prawostronnie z tiotrzymujemy równość permutacji σ i τ na zbiorze {1, . . . , n} \ {i}. To zaś wrazz warunkiem σ(i) = j = τ(i) daje σ = τ .
Aby wykazać surjektywność Cij weźmy dowolną permutację η ∈ Sn−1 ipołóżmy
ηij(m) ={ (
t−1j ◦ η ◦ ti
)(m) dla m ∈ {1, . . . , n} \ {i}
j dla m = i
Funkcja ηij ∈ Sn, bo jako złożenie bijekcji jest bijekcją; z jej definicji wynikatakże ηij ∈ Zij . Wreszcie Cij(ηij) = tj ◦
(t−1j ◦ η ◦ ti
)◦ t−1
i = η. �
Dowód twierdzenia Laplace’a (12.7): Ustalmy i ∈ {1, . . . , n}. Z lematu 12.8wynika, że dla dowolnego j ∈ {1, . . . , n} i dowolnej permutacji σ ∈ Zij spełnionyjest warunek
(−1)i+jsgn (Cij(σ)) = sgnσ.
Stąd, z definicji wyznacznika i lematu 12.9 otrzymujemy
detA =∑σ∈Sn
sgnσ a1σ(1) · . . . · anσ(n)
=n∑j=1
aij∑σ∈Zij
sgnσn∏
k=1,k 6=i
akσ(k)
=n∑j=1
(−1)i+jaij∑σ∈Zij
sgn (Cij(σ))n∏
k=1,k 6=i
akσ(k)
=n∑j=1
(−1)i+jaij∑
η∈Sn−1
sgn ηn∏
k=1,k 6=i
ak,(C−1ij (η))(k)
=n∑j=1
(−1)i+jaij∑
η∈Sn−1
sgn ηn−1∏p=1
at−1i
(p),(t−1j ◦η◦ti))(t−1i (p))
=n∑j=1
(−1)i+jaij∑
η∈Sn−1
sgn ηn−1∏p=1
at−1i
(p),t−1j
(η(p))
=n∑j=1
(−1)i+jaij detAij
�
5

Wniosek 6.2.10. wn. 12.10
Definicja 6.2.11. defin. 12.11
Wniosek 6.2.12. wn. 12.12
Stwierdzenie 6.2.13. Dla A ∈ Mnn(F ) oraz k, l = 1, . . . , n, k 6= l spełnionyjest warunek
det (skl(A)) = −detA.
Dowód: Dla ustalenia uwagi przyjmijmy k < l i niech skl(A) = B = [bij ] ∈Mnn(F ). Wówczas dla dowolnego j = 1, . . . , n mamy
bij = aij dla i /∈ {k, l}, bkj = alj , blj = akj .
Jeżeli l = k + 1, to stosując rozwinięcie Laplace’a detB względem (k +1)−szego wiersza otrzymujemy
detB =n∑j=1
(−1)k+1+j detBk+1,j =n∑j=1
(−1)k+1+j detAk,j
= −n∑j=1
(−1)k+j detAkj = −detA,
gdzie ostatnia równość wynika z rozwinięcia Laplace’a detA względem k−tegowiersza.
Zatem zamiana dwóch sąsiednich wierszy zmienia znak wyznacznika. Z dru-giej strony zamiana wiersza k−tego z l−tym wymaga (k− l) zamian sąsiednich,aby przeprowadzić wiersz l−ty na miejsce k-te, oraz (k − l − 1) zamian są-siednich, aby przeprowadzić stary wiersz k−ty (znajdujący się teraz na miejscu(k + 1)−szym) na miejsce l−te. Stąd
det(skl(A)) = (−1)2(k−l)−1 detA = − detA.
�
Wniosek 6.2.14. wn. 12.14
Wniosek 6.2.15. wn. 12.15
Stwierdzenie 6.2.16. Jeżeli A ∈Mnn oraz B ∈Mmm, to
1.
det[A θX B
]= detAdetB
dla dowolnej macierzy X ∈Mmn.
2.
det[Y AB θ
]= (−1)mn detAdetB
dla dowolnej macierzy Y ∈Mnm.
6

Dowód: Macierz D = [dij ] ∈ Mm+n,m+n dana w postaci blokowej D =[A θX B
]ma wyrazy
dij =
aij dla 1 ¬ i, j ¬ nbi−n,j−n dla n+ 1 ¬ i, j ¬ m+ n0 dla 1 ¬ i ¬ n, n+ 1 ¬ j ¬ m+ nxi−n,j dla n+ 1 ¬ i ¬ m+ n, 1 ¬ j ¬ n
1. Indukcja względem n. Dla n = 1 wzór wynika z rozwinięcia Laplace’awzględem pierwszego wiersza.
Załóżmy, że wzór jest prawdziwy dla pewnego stopnia k ∈ N macierzy A.Przypuśćmy teraz, że A ∈ Mk+1,k+1 i rozwińmy wyznacznik macierzy Dwzględem pierwszego wiersza i skorzystajmy z założenia indukcyjnego
detD =k+1+m∑j=1
(−1)1+jd1j detD1j =k+1∑j=1
(−1)1+ja1j det[A1j θXj B
]
=k+1∑j=1
(−1)1+ja1j detA1j detB = detA detB
(Xj oznacza tu macierz X, w której skreślono j−tą kolumnę).
2. Wystarczy przestawić w macierzy[Y AB θ
]pierwszych n wierszy z za-
chowaniem kolejności na koniec (potrzeba na to po m zamian na każdywiersz), skorzystać z pierwszej części stwierdzenia i ze stw. 12.13.
�
Twierdzenie 6.2.17. tw. 12.17
Wniosek 6.2.18. wn. 12.18
Stwierdzenie 6.2.19. stw. 12.19
6.3 Rząd macierzy
Stwierdzenie 6.3.1. stw. 12.20
Definicja 6.3.2. def. 12.21
Wniosek 6.3.3. wn. 12.22
Stwierdzenie 6.3.4. stw. 12.23
Wniosek 6.3.5. wn. 12.24
Stwierdzenie 6.3.6. F stw. 12.15
7
6.4 Układy równań liniowych
Definicja 6.4.1. def. 13.1
Definicja 6.4.2. def. 13.2
Definicja 6.4.3. def. 13.3
Przykład 6.4.4. przykł. 13.4
Definicja 6.4.5. def. 13.5
Stwierdzenie 6.4.6. stw. 13.6
Stwierdzenie 6.4.7. stw. 13.7
Definicja 6.4.8. def. 13.8
Twierdzenie 6.4.9. tw. 13.9
Twierdzenie 6.4.10. tw. 13.11
Uwaga 6.4.11. uwaga 2 po tw. 13.11
Stwierdzenie 6.4.12. stw. 13.12
Definicja 6.4.13. def. 13.13
Wniosek 6.4.14. wn. 13.14
Stwierdzenie 6.4.15. stw. 13.15
Twierdzenie 6.4.16. F tw. 13.16
Wniosek 6.4.17. wn. 13.17
7 Przestrzenie i przekształcenia afiniczne
7.1 Przestrzeń afiniczna
Definicja 7.1.1. def. 14.1
Stwierdzenie 7.1.2. stw. 14.2
Przykład 7.1.3. przykł. 14.3
Definicja 7.1.4. def. 14.4
Stwierdzenie 7.1.5. stw. 14.5
Definicja 7.1.6. def. 14.6
Przykład 7.1.7. przykł. 14.7
Definicja 7.1.8. def. 14.9
Stwierdzenie 7.1.9. stw. 14.10
Przykład 7.1.10. przykł. 14.12
8

Definicja 7.1.11. def. 14.14
Przykład 7.1.12. przykł. 14.15
Załóżmy teraz, że przestrzeń afiniczna (E, V,→) jest rzeczywista tzn, że Vjest przestrzenia liniową nad ciałem R.
Definicja 7.1.13. def. 16.1
Stwierdzenie 7.1.14. stw. 16.2
Definicja 7.1.15. def. 16.3
Przykład 7.1.16. przykł. 16.4
Twierdzenie 7.1.17. tw. 16.5
Definicja 7.1.18. def. 16.9
Definicja 7.1.19. def. 16.10
Definicja 7.1.20. def. 16.11
Przykład 7.1.21. przykł. 16.12
7.2 Podprzestrzenie afiniczne
Definicja 7.2.1. def. 15.1
Stwierdzenie 7.2.2. stw. 15.2
Stwierdzenie 7.2.3. stw. 15.3
Definicja 7.2.4. def. 15.4
Definicja 7.2.5. def. 15.5
Przykład 7.2.6. przykł. 15.6
Stwierdzenie 7.2.7. stw. 15.7
Definicja 7.2.8. def. 15.9
Stwierdzenie 7.2.9. stw. 15.10
Stwierdzenie 7.2.10. stw. 15.11
7.3 Przekształcenia afiniczne
Załóżmy, że V, V ′ są przestrzeniami liniowymi nad tym samym ciałem F , zaś(E, V,→) oraz (E′, V ′,→′) — przestrzeniami afinicznymi
Definicja 7.3.1. def. 17.1
Przykład 7.3.2. przykł. 17.2
Stwierdzenie 7.3.3. stw. 17.3
Stwierdzenie 7.3.4. stw. 17.4
9
Wniosek 7.3.5. wn. 17.5
Wniosek 7.3.6. wn. 17.6
Definicja 7.3.7. def. 17.7
Stwierdzenie 7.3.8. stw. 17.8
Stwierdzenie 7.3.9. stw. 17.9
Definicja 7.3.10. def. 17.10
Twierdzenie 7.3.11. def. 17.11
8 Geometria iloczynu skalarnego
8.1 Norma, kąt i odległość
Załóżmy, że V jest przestrzenią liniową z iloczynem skalarnym 〈., .〉.
Definicja 8.1.1. def. 19.1
Przykład 8.1.2. przykł. 19.2
Twierdzenie 8.1.3. tw. 19.3
Stwierdzenie 8.1.4. stw. 19.4
Stwierdzenie 8.1.5. stw. 19.5
Stwierdzenie 8.1.6. stw. 19.6
Definicja 8.1.7. def. 19.7
Stwierdzenie 8.1.8. stw. 19.9
Wniosek 8.1.9. wn. 19.10
Wniosek 8.1.10. wn. 19.11
Definicja 8.1.11. Przestrzenią euklidesową nazywamy przestrzeń afiniczną,której przestrzeń liniową jest skończonego wymiaru i określony w niej jest ilo-czyn skalarnym.
W przestrzeni euklidesowej E odległością (lub metryką) nazywamy funkcjęprzypisującą dwóm punktom p, q ∈ E liczbę rzeczywistą |pq| = ‖−→pq‖.
Stwierdzenie 8.1.12. stw. 19.13
Przykład 8.1.13. przykł. 19.14
Stwierdzenie 8.1.14. stw. 19.15
Definicja 8.1.15. def. 19.16
10

8.2 Wyznacznik Grama i objętość
Definicja 8.2.1. Dla danych wektorów v1, . . . , vk z przestrzeni liniowej V ziloczynem skalarnym 〈., .〉 macierz
G(v1, . . . , vk) = [〈vi, vj〉]1¬i,j¬k
nazywamy macierzą Grama wektorów v1, . . . , vk, zaś jej wyznacznikdetG(v1, . . . , vk) — wyznacznikiem Grama tychże wektorów.
Przykład 8.2.2. 1. detG(v1) = ‖v1‖2
2. detG(v1, v2) = ‖v1‖2 ‖v2‖2 − 〈v1, v2〉2 = ‖v1‖2 ‖v2‖2(1− cos2^(v1, v2)) =(‖v1‖ ‖v2‖ sin^(v1, v2))2
Stwierdzenie 8.2.3. W przestrzeni Rn ze standardowym iloczynem skalarnydla v1, . . . , vn ∈ Rn zachodzi związek
detG(v1, . . . , vn) =
det
v1...vn
2
Dowód;�
Stwierdzenie 8.2.4. W przestrzeni liniowej V z iloczynem skalarnym 〈., .〉 dlav1, . . . , vk spełnione są warunki:
1. detG(v1, . . . , vk) 0,
2. detG(v1, . . . , vk) = 0 wtedy i tylko wtedy, gdy układ (v1, . . . , vk) jestliniowo zależny.
Dowód:�
Stwierdzenie 8.2.5. W przestrzeni liniowej V z iloczynem skalarnym 〈., .〉 dlav1, . . . , vk spełnione są warunki:
1.∀σ∈Sk detG(vσ(1), . . . , vσ(k)) = detG(v1, . . . , vk)
2.∀a∈R detG(av1, v2, . . . , vk) = a2 detG(v1, . . . , vk)
3.
∀a2,...,ak∈R detG
v1 +k∑j=2
ajvj , v2, . . . , vk
= detG(v1, . . . , vk)
Dowód:�
11

Stwierdzenie 8.2.6. W przestrzeni liniowej V z iloczynem skalarnym 〈., .〉 dlav1, . . . , vk spełnione są warunki:
1. detG(v1, . . . , vk) ¬ ‖v1‖2 · . . . · ‖vk‖2,
2. przy założeniu v1, . . . , vk 6= θ równość detG(v1, . . . , vk) = ‖v1‖2 · . . . ·‖vk‖2zachodzi wtedy i tylko wtedy, gdy układ (v1, . . . , vk) jest ortogonalny.
Dowód:�
Definicja 8.2.614 def. 18.11
Stwierdzenie 8.2.612 Dla dowolnej podprzestrzeni afinicznej H przestrzeni eu-klidesowej E i dowolnego punktu p ∈ E jego rzut ortogonalny πH(p) jest jedy-nym punktem przestrzeni E odległym od H o d(p,H).
Stwierdzenie 8.2.634 stw. 18.12
Stwierdzenie 8.2.7. Jeżeli (p; v1, . . . , vk) jest układem współrzędnych w pod-przestrzeni afinicznej H przestrzeni euklidesowej E, to odległość punktu q ∈ Eod podprzestrzeni H wyraża się wzorem
d(q,H) =
√detG (v1, . . . , vk,
−→pq)detG(v1, . . . , vk)
Dowód:�
Definicja 8.2.8. Ścianą l–wymiarową sympleksu k–wymiarowego conv (p0, . . . , pk),gdzie 0 ¬ l ¬ k, nazywamy każdy sympleks postaci conv (pi0 , . . . , pil), gdzie(i0, . . . , il) jest podciągiem ciągu (0, . . . , k).
Definicja 8.2.9. Kompleksem symplicjalnym w przestrzeni afinicznej E nazy-wamy taki skończony układ sympleksów (S1, . . . , Sm) z tej przestrzeni, że dladowolnych i, j = 1, . . . ,m zbiór Si ∩ Sj jest pusty lub jest wspólną ścianą sym-pleksów Si oraz Sj .
Pozdbiór przestrzeni E, który dla pewnego k ∈ N ∪ {0} można przedstawićjako sumę sympleksów pewnego kompleksu symplicjalnego zawierającego tylkosympleksy k–wymiarowe, nazywamy k–wymiarowym wielościanem.
Podział wielościanu na sumę sympleksów pewnego kompleksu symplicjalnegonazywamy triangulacją.
Wielościan dwuwymiarowy zawarty w płaszczyźnie nazywamy wielokątem.
Przykład 8.2.10. 1. Każdy zbiór skończony jest 0–wymiarowym wielościa-nem.
2. Sumę sympleksów kompleksu zawierającego tylko sympleksy co najwyżejjednowymiarowe nazywamy grafem skończonym.
Twierdzenie 8.2.11. Dla dowolnego k ∈ N pryzma k–wymiarowa jest k–wymiarowym wielościanem.
Pewna triangulacja pryzmy Q(conv (p0, . . . , pk−1), v) składa się z k symplek-sów, z których każdy rozpięty jest na k wektorach postaci
ε1−−→p0p1 + . . .+ εk−1
−−−−→p0pk−1 + εv,
gdzie ε1, . . . , εk−1, ε ∈ {−1, 0.1}.
12

Dowód: Moszyńska, Święcicka, Geometria z algebrą liniową.�
Twierdzenie 8.2.12. Dla dowolnego k ∈ N równoległościan k–wymiarowy jestk–wymiarowym wielościanem.
Pewna triangulacja równoległościanu P(p0; v1, . . . , vk) składa się z k! sym-pleksów, z których każdy rozpięty jest na k wektorach postaci
ε1v1 + . . .+ εkvk,
gdzie ε1, . . . , εk ∈ {−1, 0.1}.
Dowód: Moszyńska, Święcicka, Geometria z algebrą liniową.�
Definicja 8.2.13. Niech k ∈ N. Objętością k–wymiarową (lub miarą k–wymiarową)układu punktów (p0, . . . , pk) z przestrzeni afinicznej E z iloczynem skalarnym〈., .〉 nazywamy liczbę
vol (p0, . . . , pk) =1k!
√detG (−−→p0p1, . . . ,
−−→p0pk).
Jeżeli wielościan k–wymiarowy P ma triangulację postaci(∆i = conv
(p
(i)0 , . . . , p
(i)k
))1¬i¬m
i sympleksy tej triangulacji są parami różne, to k–wymiarową objętością wielo-ścianu P nazywamy liczbę
volk(P) =m∑i=1
volk(p
(i)0 , . . . , p
(i)k
).
Zamiast vol2 piszemy czasem P , zamiast vol3 — V , a vol1 jest zwykłą odle-głością punktów |. .|.
Można udowodnić, że definicja objętości wielościanu nie zależy od wyborujego triangulacji.
Niech odtąd E będzie przestrzenią afiniczną o przestrzeni nośnej V , w którejokreślony jest iloczyn skalarny 〈., .〉.
Stwierdzenie 8.2.14. Dla dowolnego k 2 i dowolnego układu punktów(p0, . . . , pk) z przestrzeni E zachodzi równość
volk(p0, . . . , pk) =1kd(pk, H) · volk−1(p0, . . . , pk−1),
gdzie H = af (p0, . . . , pk−1).
Dowód:�
Przykład 8.2.15. 1. Pole trójkąta:
P (∆ABC) = vol2(A,B,C) =12
vol1(A,B) · d(C,AB) =12|AB|hC
13

2. Objętość czworościanu:
V (conv (A,B,C,D)) =vol3(A,B,C,D) =13
vol2(A,B,C) · d(D,ABC)
=13P (∆ABC)hD
Stwierdzenie 8.2.16. (objętość sympleksu, pryzmy i równoległościanu) Niech(p0, . . . , pk) będzie układem punktów z przestrzeni E w położeniu ogólnym,vi = −−→p0pi dla i = 1, . . . , k oraz v ∈ V \ lin (v1, . . . , vk−1). Wówczas
1. volk(conv (p0, . . . , pk)) = 1k!
√detG(v1, . . . , vk),
2. volk(Q(conv (p0, . . . , pk−1), v)) = 1(k−1)!
√detG(v1, . . . , vk−1, v),
3. volk(P(p0; v1, . . . , vk)) =√
detG(v1, . . . , vk).
Dowód:�
8.3 Orientacja i iloczyn wektorowy
Niech V będzie rzeczywistą przestrzenią liniową skończonego wymiaru.
Stwierdzenie 8.3.1. W zbiorze B wszystkich baz przestrzeni V określamyrelację ∼ jako posiadanie macierzy przejścia o dodatnim wyznaczniku
(inaczej B ∼ C ⇐⇒ detMCB > 0) .
Wówczas
1. ∼ jest relacją równoważności w zbiorze B,
2. ∼ ma dwie klasy abstrakcji.
Dowód:
1. Zwrotność relacji ∼ wynika z faktu, że macierzą przejścia od bazy do tejsamej bazy jest macierz jednostkowa o wyznaczniku 1 > 0.
Aby wykazać symetrię załóżmy, że B ∼ C, co oznacza, że detMCB > 0.Wówczas z twierdzenia Cauchy’ego otrzymujemy, że
detMBC = det (MCB)−1 =1
detMCB> 0,
czyli C ∼ B.
Przechodniość wynika z wniosku 11.16 i twierdzenia Cauchy’ego; jeżeliB ∼ C i C ∼ D, to
detMDB = det (MDC ·MCB) = detMDC detMCB > 0,
skąd B ∼ D.
14

2. Niech B = (v1, . . . , vn−1, vn) ∈ B. Wówczas bazą przestrzeni V jest takżeD = (v1, . . . , vn−1,−vn).
Niech C ∈ B. Macierz przejścia od bazy do bazy jest nieosobliwa, więcdetMCB > 0 albo detMCB < 0. W pierwszym przypadku C ∼ B. Rozwa-żając przypadek drugi zauważmy najpierw, że licząc wyznacznik macierzydiagonalnej dostajemy
detMDB =
∣∣∣∣∣∣∣∣∣∣1 0 . . . 0 00 1 . . . 0 0. . . . . . .0 0 . . . 1 00 0 . . . 0 −1
∣∣∣∣∣∣∣∣∣∣= −1.
Zatem ponowne zastosowanie twierdzenia Cauchy’ego pociąga za sobą
detMCD = det (MCB ·MBD) = detMCB detMBD = −detMCB > 0,
czyli C ∼ D.
Tym samym B,D ∈ B wyznaczają jedyne dwie klasy abstrakcji relacji ∼.
�
Definicja 8.3.2. W rzeczywistej przestrzeni liniowej V skończonego wymiarukażdą z klas abstrakcji relacji wiążacej bazy o macierzy przejścia, która madodatni wyznacznik, nazywamy orientacją przestrzeni V .
Mówimy, że dwie bazy należące do tej samej orientacji są zgodnie zoriento-wane, a bazy należące do różnych orientacji — przeciwnie zorientowane.
Przestrzeń z wybraną orientacją nazywamy przestrzenią zorientowaną, abazę należącą do wybranej orientacji w tej przestrzeni — bazą dodatnio zo-rientowaną.
Stwierdzenie 8.3.3. Niech (v1, . . . , vn) będzie bazą przestrzeni liniowej V .Wtedy
1. ∀a∈R (v1, . . . , vn) ∼ (v1, . . . , avn)⇐⇒ a > 0,
2. ∀σ∈Sn (v1, . . . , vn) ∼ (vσ(1), . . . , vσ(n))⇐⇒ sgnσ = 1.
Dowód: Wystarczy zastosować odpowiednie operacje elementarne do ma-cierzy jednostkowej, która jest macierzą przejścia od danej bazy do niej samej.�
Niech odtąd V oznacza zorientowaną przestrzeń euklidesową liniową.
Stwierdzenie 8.3.4. Niech dany będzie liniowo niezależny układ wektorów(v1, . . . , vn−1) w n–wymiarowej zorientowanej przestrzeni euklidesowej liniowejV . Istnieje dokładnie jeden wektor v ∈ V taki, że
(VP1) v ⊥ lin (v1, . . . , vn−1)
(VP2) ‖v‖ =√
detG(v1, . . . , vn−1)
(VP3) baza (v1, . . . , vn−1, v) jest dodatnio zorientowana
15

Dowód: Uzupełnijmy liniowo niezależny układ wektorów (v1, . . . , vn−1) wek-torem u do bazy przestrzeni V . Oznaczmy przez w rzut ortogonalny wektora wna podprzestrzeń lin (v1, . . . , vn−1). Wówczas w 6= θ oraz w ⊥ lin (v1, . . . , vn−1).
Połóżmy
v =
√detG(v1, . . . , vn−1)
‖w‖w.
Mamy niezmiennie w ⊥ lin (v1, . . . , vn−1) oraz ‖v‖ =√
detG(v1, . . . , vn−1),czyli wektor v spełnia warunki (VP1) i (VP2).
Jeżeli baza (v1, . . . , vn−1, v) jest dodatnio zorientowana, to wektor v spełniarónież warunek (VP3). W przeciwnym wypadku warunek ten spełnia wektor −v(stw. 21.4(2)) czyniąc cały czas zadość pozostałym warunkom.
Przypuśćmy, że wektor v′ spełnia warunki (VP1)–(VP3). Wówczas na mocy(VP1) wraz z wektorem v należy do jednowymiarowej podprzestrzeni(lin (v1, . . . , vn−1))⊥ (bo układ (v1, . . . , vn−1) jest liniowo niezależny, a dimV =n). Istnieje więc liczba a taka, że v′ = av. Warunek (VP2) implikuje |a| = 1,jednak zgodnie ze stw. 21.4(2) a = −1 powodowałoby zaprzeczenie warunku(VP3). Stąd v′ = v. �
Definicja 8.3.5. Niech v1, . . . , vn−1 będą wektorami n–wymiarowej zoriento-wanej przestrzeni euklidesowej liniowej V . Wektor v ∈ V określony jako:
• θ, gdy układ (v1, . . . , vn−1) jest liniowo zależny,
• jedyny wektor spełniający warunki (VP1)–(VP3), gdy układ (v1, . . . , vn−1)jest liniowo niezależny,
nazywamy iloczynem wektorowym wektorów v1, . . . , vn−1 i zapisujemy v1× . . .×vn−1.
Stwierdzenie 8.3.6. Iloczyn wektorowy w zorientowanej n–wymiarowej przest-rzeni euklidesowej liniowej V jest
1. skośnie symetryczny, tzn. dla dowolnych v1, . . . , vn−1 ∈ V oraz permutacjiσ ∈ Sn−1 spełniony jest warunek
vσ(1) × . . .× vσ(n−1) = sgnσ v1 × . . .× vn−1
2. (n− 1)–liniowy, tzn. dla dowolnych k = 1, . . . , n− 1, v1, . . . , vn−1, v′k ∈ V
oraz a, a′ ∈ R spełniony jest warunek
v1 × . . .× vk−1 × (avk + a′v′k)× vk+1 × . . .× vn−1
= a v1 × . . .× vk−1 × vk × vk+1 × . . .× vn−1
+ a′ v1 × . . .× vk−1 × v′k × vk+1 × . . .× vn−1
Dowód: Fakty te wynikają z definicji iloczynu skalarnego — uzyskujemywtedy warunek (VP1), stw. 20.6 — (VP2) i stw. 21.4 — (VP3). �
Wniosek 8.3.7. W przestrzeni liniowej Rn ze standardowym iloczynem ska-larnym i orientacją daną przez bazę kanoniczną iloczyn wektorowy wyraża sięwzorem
v1 × . . .× vn−1 =((−1)1+n detA1, . . . , (−1)n+n detAn
),
16

gdzie macierz A ∈ Mn−1,n ma jako kolejne wiersze współrzędne wektorówv1, . . . , vn−1, a dla każdego j = 1, . . . , n macierz Aj powstaje z A przez skreśleniej–tej kolumny.
Dowód: Oznaczmy przez aj = (−1)j+n detAj , j = 1, . . . , n i niech w =(a1, . . . , an).
Jeżeli wektory v1, . . . , vn−1 są liniowo zależne, to rA < n − 1, więc każdy zminorów stopnia n− 1 macierzy A (a takimi są detAj , j = 1, . . . , n) jest równy0, skąd
v1 × . . .× vn−1 = θ = w.
Załóżmy teraz, że v1, . . . , vn−1 są liniowo niezależne. Wówczas rA = n − 1i w 6= θ. Pokażemy, że wektor w spełnia (VP1)–(VP3), czyli jest iloczynemwektorowym danych wektorów.
Zauważmy, że rozwinięcie Laplace’a wzgledem ostatniego wiersza daje dladowolnego u = (u1, . . . , un) ∈ Rn równość
〈w, u〉 =n∑j=1
ajuj =n∑j=1
(−1)n+juj detAj = det
v1...
vn−1
u
(1)
Zatem 〈w, vl〉 = 0, l = 1, . . . , n − 1, do wówczas wyznacznik w (1) ma takisam wiersz l–ty i n–ty. Zatem w spełnia warunek (VP1).
Biorąc w (1) u = w dostajemy
‖w‖2 = det
v1...
vn−1
w
, (2)
skąd natychmiast wynika (VP3).Ponadto uwzględniając wzór (2), stwierdzenie 20.3 i (VP1) uzyskujemy
‖w‖4 =
det
v1...
vn−1
w
2
= detG(v1, . . . , vn−1, w) = detG(v1, . . . , vn−1)‖w‖2,
co wraz z niezerowością wektora w pozwala na wywnioskowanie warunku (VP2).�
9 Formy dwuliniowe i kwadratowe
9.1 Postać kanoniczna
Załóżmy, że V jest skończenie wymiarową przestrzenią liniową nad ciałem Fcharakterystyki różnej od 2.
17

Definicja 9.1.1. Funkcjonałem dwuliniowym (lub formą dwuliniową) na przest-rzeni liniowej V nad ciałem F nazywamy funkcję f : V × V → F spełniającąwarunki
(BF1) ∀u,v,w∈V ∀a,b∈F f(au+ bv, w) = af(u,w) + bf(v, w)
(BF2) ∀u,v,w∈V ∀a,b∈F f(u, av + bw) = af(u, v) + bf(u,w)
Zbiór wszystkich funkcjonałów dwuliniowych na przestrzeni V oznaczamyprzez L(V 2;F).
Stwierdzenie 9.1.2. Każdy funkcjonał dwuliniowy jest jednoznacznie okre-ślony przez swoje wartości na bazie przestrzeni.
Dokładniej, jeżeli (e1, . . . , en) jest bazą przestrzeni liniowej V , to dla
x =n∑i=1
ciei, y =n∑j=1
djej ∈ V
mamy
f(x, y) =n∑
i,j=1
aijcidj ,
gdzie aij = f(ei, ej) dla i, j = 1, . . . , n.
Dowód: wynika bezpośrednio z definicji. �
Stwierdzenie 9.1.3. Jeżeli (e1, . . . , en) jest bazą przestrzeni liniowej VF, zaśA = [aij ] ∈ Mnn(F), to istnieje dokładnie jeden funkcjonał dwuliniowy f na Vtaki, że f(ei, ej) = aij .
Definicja 9.1.4. Załóżmy, że E = (e1, . . . , en) jest bazą przestrzeni liniowej VFi niech f będzie funkcjonałem dwuliniowym na V . Macierz
ME(f) = [f(ei, ej)]1¬i,j¬n
nazywamy macierzą funkcjonału dwuliniowego f w bazie E .
Stwierdzenie 9.1.5. Jeżeli A jest macierzą funkcjonału dwuliniowego f ∈L(V 2;F) w bazie E , a C jest macierzą przejścia od bazy E do bazy B, to
MB(f) = CTAC.
Dowód: Niech E = (e1, . . . , en) oraz B = (v1, . . . , vn) będą bazami prze-strzeni V , f ∈ L(V 2;F ). Niech ME(f) = A = [aij ] zaś C = [cij ] niech będziemacierza przejścia od bazy E do bazy B. Wówczas f(ei, ej) = aij , skąd
f(vi, vj) = f
(n∑k=1
ckiek,
n∑l=1
cljel
)=
n∑k=1
n∑l=1
ckicljakl =n∑l=1
(n∑k=1
c∗ikakl
)clj ,
gdzie [c∗ik] = CT . Zatem [f(vi, vj)] = CTAC. �
Definicja 9.1.6. Mówimy, że funkcjonał dwuliniowy f ∈ L(V 2;F) jest symet-ryczny, gdy
∀u,v∈V F (v, u) = f(u, v).
18
Stwierdzenie 9.1.7. 1. Jeżeli funkcjonał liniowy jest symetryczny, to jegomacierz w dowolnej bazie jest symetryczna.
2. Jeżeli w pewnej bazie funkcjonał dwuliniowy ma macierz symetryczną, toten funkcjonał jest symetryczny.
Dowód:
1. oczywiste.
2. wynika ze stw. 23.5 i własności transpozycji (stw. 11.8). Jeżeli macierzA = ME(f) jest symetryczna, czyli AT = A, to dla dowolnej macierzyprzejścia C od bazy E do innej bazy przestrzeni V mamy(
CTAC)T
= CTATC = CTAC,
a więc symetryczność macierzy funkcjonału dwuliniowego f w nowej bazie.
�
Definicja 9.1.8. Niech f ∈ L(V 2;F ). Funkcję F : V → F daną wzorem
F (x) = f(x, x) dla x ∈ V
nazywamy formą kwadratową generowaną przez funkcjonał dwuliniowy f .
Stwierdzenie 9.1.9. Dla dowolnej formy kwadratowej F na przestrzeni VFistnieje dokładnie jeden funkcjonał dwuliniowy symetryczny na V generujacyformę F .
Dowód: Załóżmy, że F jest formą kwadratową na V generowaną przez pe-wien funkcjonał dwuliniowy g ∈ L(V 2;F). Kładąc
f(x, y) =12
(F (x+ y)− F (x)− F (y))
można łatwo zauważyć, że f(x, y) = g(x, y), czyli f jest funkcjonałem dwulinio-wym generującym formę kwadratową F .
Jeżeli f jest symetryczny, to jest poszukiwanym funkcjonałem. Jeżeli f niejest symetryczny, to funkcja f1 : V × V → F dana wzorem
f1(x, y) =12
(f(x, y) + f(y, x))
jest funkcjonałem dwuliniowym symetrycznym oraz f1(x, x) = f(x, x) = F (x)dla x ∈ V .
Przypuścmy, że k jest dwuliniowym funkcjonałem symetrycznym takim, żek(x, x) = F (x) dla x ∈ V . Wówczas
f1(x, y) =12
(F (x+ y)− F (x)− F (y)) = k(x, y) dla x, y ∈ V,
czyli k = f1. �Iloczyn skalarny jest funkcjonałem dwuliniowym symetrycznym (i dodat-
kowo dodatnio określonym). Jego formą kwadratową jest kwadrat normy.
19

Definicja 9.1.10. Macierzą formy kwadratowej w pewnej bazie nazywamy ma-cierz generującego ją funkcjonału dwuliniowego symetrycznego w tej bazie.
Mówimy, że forma kwadratowa F jest w postaci kanonicznej w bazie E ,gdy macierz formy F w bazie E jest diagonalna. Taką bazę nazywamy baząkanoniczną formy F .
Jeżeli E = (e1, . . . , en) jest bazą kanoniczną formy F , to istnieją λ1, . . . , λn ∈F takie, że
F (x) =n∑i=1
λix2i dla x =
n∑i=1
xiei.
Twierdzenie 9.1.11. F (Lagrange’a) Dla dowolnej formy kwadratowej F okre-ślonej na skończenie wymiarowej przestrzeni liniowej V nad ciałem F charakte-rystyki różnej od 2 istnieje taka baza przestrzeni V , w której forma F ma postaćkanoniczną.
Dowód: Gleichgewicht, Algebra.�
Przykład 9.1.12.
Twierdzenie 9.1.13. F (Jacobiego) Jeżeli forma kwadratowa F określona naskończenie wymiarowej przestrzeni liniowej V nad ciałem F charakterystyki róż-nej od 2 ma w pewnej bazie macierz A = [aij ]1¬i,j¬n taką, że
∆k = det[aij ]1¬i,j¬k 6= 0 dla k = 1, . . . , n,
to istnieje baza E = (e1, . . . , en) przestrzeni V , w której forma F ma postaćkanoniczną
F (x) =n∑k=1
∆k−1
∆kx2k dla x =
n∑k=1
xkek.
przy dodatkowej umowie ∆0 = 1.
Dowód: Jefimow, Rozendorn, Algebra liniowa wraz z geometrią wielowymia-rową.
�
9.2 Formy rzeczywiste
Definicja 9.2.1. Forma kwadratowa F jest w postaci normalnej, gdy jest wpostaci kanonicznej i wszystkie jej współczynniki należą do zbioru {−1, 0, 1}.
Stwierdzenie 9.2.2. Każdą formę kwadratową określoną na rzeczywistej prze-strzeni liniowej skończonego wymiaru można przedstawić w postaci normalnej.
Dowód: Niech F będzie formą kwadratową na rzeczywistej przestrzeni li-niwej V wymiaru n. Z twierdzenia Lagrange’a (23.11) wynika, że istnieje baza(e1, . . . , en), w której forma F ma postać kanoniczną
F (x) =n∑i=1
λix2i .
20

Niech I = {i ; λi = 0} oraz dla i = 1, . . . , n
e′i =
{ei dla i ∈ I
1√|λi|
ei dla i ∈ {1, . . . , n} \ I
Wówczas baza (e′1, . . . , e′n) jest nadal bazą kanoniczną dla formy F oraz dla
i ∈ {1, . . . , n} \ IF (e′i) = λi
1|λi|
= ±1.
�
Twierdzenie 9.2.3. (Sylvestera o bezwładności) Niech F będzie formą kwa-dratową określoną na rzeczywistej przestrzeni liniowej V skończonego wymiaru.
Jeżeli E i B są dwiema bazami kanonicznymi formy F , to forma F ma wbazie E i w bazie B tę samą liczbę współczynników dodatnich.
Dowód: Ze stwierdzenia 23.14 i jego dowodu wynika, że formę kwadratową narzeczywistej przestrzeni wymiaru n można sprowadzić z postaci kanonicznej dopostaci normalnej nie zmieniając liczby współczynników dodatnich, ujemnychani zerowych.
Niech forma F ma w bazie E = (e1, . . . , en) postać normalną
F (x) = x21 + . . .+ x2
p − x2p+1 − . . .− x2
p+q dla x =n∑i=1
xiei,
czyli
λi =
1 dla i = 1, . . . , p−1 dla i = p+ 1, . . . , p+ q
0 dla i = p+ q + 1, . . . , n
i analogicznie forma F ma w bazie B = (v1, . . . , vn) postać normalną
F (y) = y21 + . . .+ y2
s − y2s+1 − . . .− y2
s+t dla y =n∑i=1
yivi.
Przypuśćmy, że p > s. Wówczas podprzestrzenie V ′ = lin (e1, . . . , ep) orazV ′′ = lin (vs+1, . . . , vn) mają wymiary odpowiednio p oraz n−s > n−p, którychsuma wynosi p+n−s > n = dimV . Zatem istnieje niezerowy wektor w ∈ V ′∩V ′′(stw. 8.17). Można go więc zapisać w postaci
x1e1 + . . .+ xpep = w = ys+1vs+1 + . . .+ ynsn
przy czym jeden ze współczynników xi jest niezerowy.Zatem stosując do wektora w obie postacie normalne otrzymujemy
0 < x21 + . . .+ x2
p = F (w) = −y2s+1 − . . .− y2
n ¬ 0.
Otrzymana sprzeczość dowodzi, że p ¬ s. Analogicznie pokazujemy, że s ¬ p,czyli ostatecznie p = s. �
Wniosek 9.2.4. Formą kwadratową na rzeczywistej przestrzeni liniowej skoń-czonego wymiaru ma w dowolnej postaci kanonicznej tę samą liczbę współczyn-ników ujemnych. �
21

Definicja 9.2.5. Mówimy, że forma kwadratowa F określoną na rzeczywistejprzestrzeni liniowej V wymiaru n ma sygnaturę (r,−s), gdzie r + s ¬ n, gdyw pewnej swojej bazie kanonicznej ma dokładnie r współczynników dodatnichi dokładnie s współczynników ujemnych.
Definicja 9.2.6. Mówimy, że forma kwadratowa F określona na rzeczywistejprzestrzeni liniowej V jest dodatnio (odpowiednio ujemnie) określona, gdy
∀x∈V \{θ} F (x) > 0(odpowiednio ∀x∈V \{θ} F (x) > 0
).
Stwierdzenie 9.2.7. Forma kwadratowa F określoną na rzeczywistej prze-strzeni liniowej V wymiaru n jest dodatnio (odpowiednio ujemnie) określonawtedy i tylko wtedy, gdy w pewnej bazie przestrzeni V forma F ma macierzA = [aij ]1¬i,j¬n spełniającą warunki:
∆k = det[aij ]1¬i,j¬k > 0 dla k = 1, . . . , n
(odpowiednio
(−1)k∆k = (−1)k det[aij ]1¬i,j¬k > 0 dla k = 1, . . . , n)
Dowód: Przeprowadzimy rozumowanie dla formy ujemnie określonej. Za-łóżmy, że forma kwadratowa F jest określona na przestrzeni V wymiaru n.⇒) Jeżeli F jest ujemnie określona, to na mocy twierdzenia Lagrange’a
(23.11) istnieje baza E = (e1, . . . , en), w której forma F ma postać kanoniczną
F (x) = λ1x21 + . . .+ λnx
2n
Po podstawieniu wektorów bazy E otrzymujemy, że λi < 0 dla i = 1, . . . , n.Minory główne diagonalnej macierzy formy F w bazie E są równe
∆k = λ1 · . . . · λk, k = 1, . . . , n
co wraz z ujemnością wszystkich λi daje
(−1)k∆k = (−1)2k|λ1| · . . . · |λk| > 0.
⇐) Załóżmy, że minory główne ∆k są w pewnej bazie B na przemian ujemnei dodatnie. Spełnione są więc założenia twierdzenia Jacobiego (23.12), więc ist-nieje baza E , w której forma kwadratowa F ma postać kanoniczną
F (x) =n∑k=1
∆k−1
∆kx2k.
Wszystkie współczynniki λk = ∆k−1∆k
= (−1)k−1|∆k−1|(−1)k|∆k| są ujemne, więc dla v 6= θ
mamy F (v) < 0. �
Uwaga 9.2.8. Iloczyn skalarny można określić w przestrzeni liniowej skończo-nego wymiaru nad dowolnym ciałem żądając, aby był to funkcjonał dwuliniowy,symetryczny i niezdegenerowany, to znaczy np. żeby jego macierz była nieoso-bliwa.
Innym sposobem sposobem uogólnienia iloczynu skalarnego na przestrzeniezespolone jest określenie iloczynu hermitowskiego: liniowego ze względu na pierw-szą zmienną, z częściową symetrią daną przez warunek g(v, u) = g(u, v) i do-datnią określonością analogiczną do tej w przestrzeni rzeczywistej (bo g(v, v) =g(v, v) ∈ R).
22

10 Endomorfizmy przestrzeni skończonego wy-miaru
10.1 Wektory i wartości własne
Załóżmy, że V jest skończenie wymiarową przestrzenią liniową nad ciałem F ,zaś ϕ — endomorfizmem przestrzeni V , tzn. przekształceniem liniowym V → V .
Definicja 10.1.1. Podprzestrzeń liniową U przestrzeni liniowej V nazywamypodprzestrzenią niezmienniczą endomorfizmu ϕ (lub krótko podprzestrzenią ϕ–niezmienniczą), gdy ϕ(U) ⊂ U .
Przykład 10.1.2. 1. Podprzestrzeń trywialna {θ} jest niezmiennicza wzglę-dem dowolnego endomorfizmu.
2. Dla dowolnego endomorfizmu ϕ : V → V przestrzeń V jest ϕ–niezmiennicza.
3. Każda podprzestrzeń liniowa U przestrzeni liniowej V jest idV –niezmienniczaoraz Θ–niezmiennicza.
Definicja 10.1.3. Jeżeli wektor v ∈ V \{θ} oraz skalar λ ∈ F spełniają warunek
(E) ϕ(v) = λv,
to λ nazywamy wartością własną endomorfizmu ϕ, a v — wektorem własnymtego endomorfizmu.
Dla danej wartości własnej λ endomorfizmu ϕ zbiór
Eλ = {v ∈ V : ϕ(v) = λv}
nazywamy podprzestrzenią własną dla wartości własnej λ.
Przykład 10.1.4. 1. Dla ϕ = idV podprzestrzeń własna E1 = V .
2. Dla ϕ = −idV podprzestrzeń własna E−1 = V .
3. Jeżeli λ1, λ2 są różnymi wartościami własnymi endomorfizmu ϕ, to
Eλ1 ∩ Eλ2 = {θ}.
Stwierdzenie 10.1.5. Niech B będzie bazą pzestrzeni liniowej V , a A macierząendomorfizmu ϕ w tej bazie (czyli A = MBB(ϕ)).
Wówczas λ jest wartością własną endomorfizmu ϕ wtedy i tylko wtedy, gdydet(A− λI) = 0.
Dowód: ⇒) Załóżmy, że λ jest wartością własną endomorizmu ϕ. Istniejewówczas niezerowy wektor v ∈ V taki, że ϕ(v) = λv. Współrzędne wektora v wbazie B tworzą niezerowy wektor CB(v) ∈ Fn.
Stąd oraz z własności macierzy przekształcenia liniowego i współrzędnychwektora w bazie (wn. 11.8) wynika, że
λI CB(v) = λCB(v) = CB(λv) = CB(ϕ(v)) = MBB(ϕ)CB(v) = ACB(v).
Zatem układ równań (A−λI)X = θ ma niezerowe rozwiązanie, co w połączeniuz tw. Cramera (13.9) daje det(A− λI) = 0.
23

⇐) Załóżmy, że det(A − λI) = 0 dla pewnego λ ∈ F . Wówczas jedno-rodny układ równań (A − λI)X = θ ma na mocy tw. Cramera niezerowerozwiązanie (bo ma więcej niż jedno rozwiązanie). Niech będzie nim wektorw = (a1, . . . , an) ∈ Fn \ {θ}.
Połóżmy v = a1v1 + . . .+ anvn, gdzie (v1, . . . , vn) = B. Wówczas CB(v) = wi analogicznie jak w części ”wtedy” otrzymujemy, że CB(ϕ(v)) = CB(λv), czyliϕ(v) = λv. �
Stwierdzenie 10.1.6. Niech B i C będą bazami przestrzeni liniowej V , A ma-cierzą endomorfizmu ϕ : V → V w bazie B, zaś D — macierzą ϕ w bazie C.
Wówczas dla dowolnego x ∈ F prawdziwa jest równość
det(A− xI) = det(D − xI).
Dowód: Niech E będzie macierzą przejścia od bazy B o bazy C. WówczasE jest macierzą nieosobliwą i D = EAE−1, skąd na mocy własności działań namacierzach (stw. 11.9) oraz twierdzenia Cauchy’ego (12.17) otrzymujemy
det(D − xI) = det(EAE−1 − xI) = det(EAE−1 − EE−1xI)
= det(EAE−1 − E xI E−1) = det
(E(A− xI)E−1)
= detE det(A− xI) det(E−1) = det(A− xI).
�
Definicja 10.1.7. Niech A będzie macierzą endomorfizmu ϕ : V → V w pewnejbazie przestrzeni liniowej V .
Wielomian x 7→ det(A − xI) nazywamy wielomianem charakterystycznymendomorfizmu ϕ.
Uwaga 10.1.8. Stosując rozwninięcie Laplace’a dla det(A − xI) można po-kazać indukcyjnie, że wyznacznik ten jest wielomianem stopnia n = dimV owspółczynniku przy xn równym (−1)n.
Stwierdzenie 24.6 gwarantuje niezależność wielomianu charterystycznego en-domorfizmu od wyboru bazy przestrzeni.
Przykład 10.1.9. 1. Wielomianem charakterystycznym tożsamości na prze-strzeni n–wymiarowej jest (1− x)n.
2. Wielomianem charakterystycznym przekształcenia zerowego na przestrzenin–wymiarowej jest (−1)nxn.
3. Wielomianem charakterystycznym obrotu w R2 o kąt α, czyli przekształ-
cenia danego macierzą[
cosα − sinαsinα cosα
], jest x2 − 2x cosα+ 1.
Stwierdzenie 10.1.10. Endomorfizm ϕ przestrzeni n–wymiarowej posiada nliniowo niezależnych wektorów własnych wtedy i tylko wtedy, gdy macierz en-domorfizmu ϕ w pewnej bazie jest diagonalna.
Dowód: Niech dimV = n i niech ϕ będzie endomorfizmem przestrzeni li-niowej V .
Jeżeli B = (v1, . . . , vn) jest liniowo niezależnym układem wektorów własnychendomorfizmu ϕ, przy czym wartość własna wektora vi wynosi λi, i = 1, . . . n,to macierz MBB(ϕ) = [λiδij ] jest diagonalna.
24

Na odwrót, jeżeli B = (v1, . . . , vn) jest bazą, w której macierz A = [aij ] =MBB(ϕ) jest diagonalna, to dla dowolnego j = 1, . . . , n mamy
ϕ(vj) =n∑i=1
aijvi = ajjvj ,
czyli każdy z wektorów bazy B jest wektorem własnym endomorfizmu ϕ. �
Stwierdzenie 10.1.11. Każdy endomorfizm zespolonej przestrzeni liniowej do-datniego wymiaru posiada jednowymiarową podprzestrzeń niezmienniczą (ina-czej: posiada wektor własny).
Dowód: Wielomian charakterystyczny endomorfizmu ϕ przestrzeni liniowejVC wymiaru n ∈ N ma stopień n > 0 i zespolone współczynniki. Z zasadni-czego twierzenia algebry (tw. 4.12) wynika, że istnieje pierwiastek λ ∈ C tegowielomianu.
Stwierdzenie 24.5 gwarantuje istnienie wektora własnego v endomorfizmuϕ o wartości własnej λ. Z jednorodności ϕ wynika, że przestrzeń lin (v) jestϕ–niezmiennicza. �
Stwierdzenie 10.1.12. Każdy endomorfizm rzeczywistej przestrzeni liniowejdodatniego wymiaru posiada jednowymiarową lub dwuwymiarową podprzestrzeńniezmienniczą
Dowód:�
Wniosek 10.1.13. Każdy endomorfizm rzeczywistej przestrzeni liniowej skoń-czonego nieparzystego wymiaru posiada wektor własny.
Przykład 10.1.14. 1. W przestrzeni R2 obrót o kąt α 6= kπ nie ma wek-tora własnego, bo wielomian charakterystyczny x2 − 2x cosα + 1 nie mapierwiastków rzeczywistych.
2. Endomorfizm przestrzeni C2 dany macierzą[
cosα − sinαsinα cosα
](taką samą
ja obrót o α w R2) ma wartości własne cosα±i sinα, którym odpowiadająwektory własne (1,∓i).
10.2 Diagonalizacja i postać Jordana
Stwierdzenie 10.2.1. Jeżeli λ1, . . . , λk ∈ F są parami różnymi wartościamiwłasnymi endomorfizmu ϕ przestrzeni V , zaś v1, . . . , vk ∈ V — odpowiadają-cymi im wektorami własnymi, to układ (v1, . . . , vk) jest liniowo niezależny.
Dowód:�
Wniosek 10.2.2. Jeżeli endomorfizm ϕ n–wymiarowej przestrzeni liniowej po-siada n różnych wartości własnych, to w pewnej bazie tej przestrzeni ma macierzdiagonalną.
Dowód:�
25

Przykład 10.2.3. Macierz A =[
1 01 1
]ma wielomian charakterystyczny
(1− x)2, więc jej jedyną wartością własną jest 1. Jednak warunek Av = v speł-niają tylko wektory postaci (a, 0), z których nie można utworzyć bazy przestrzeniR2 (ani C2).
Definicja 10.2.4. Załóżmy, że endomorfizm ϕ n–wymiarowej przestrzeni linio-wej V ma wartość własną λ ∈ F o krotności m ¬ n. Niech A będzie macierząendomorfizmu ϕ w pewnej bazie B. Określmy dla każdego j = 0, 1, . . . podprze-strzeń liniową
V λj = {v ∈ V ; (A− λI)j · CB(v) = θ}oraz liczbę całkowitą
pj+1 = dimV λj+1 − dimV λj .
Istnieje wówczas j0 takie, że pi0 > 0 oraz pj = 0 dla j > j0.Podprzestrzeń V λm nazywamy podprzestrzenią pierwiastkową endomorfizmu
ϕ odpowiadającą wartości własnej λ, a ciąg (p1, . . . , pj0) — rozkładem charak-terystycznym krotności m wartości własnej λ.
Stwierdzenie 10.2.5. Niech ϕ będzie endomorfizmem n–wymiarowej zespo-lonej przestrzeni liniowej V . Niech λ1, . . . , λr ∈ C będą wszystkimi różnymiwartościami własnymi endomorfizmu ϕ o krotnościach odpowiednio m1, . . . ,mr
(zatem m1 + . . .+mr = n). Wtedy
V = V λ1m1 ⊕ . . .⊕ Vλrmr
(czyli przestrzeń V jest sumą prostą swoich przestrzeni pierwiastkowych).
Definicja 10.2.6. Klatką Jordana stopnia k ∈ N nazywamy macierz
Jk(λ) =
λ 0 0 . . . 0 01 λ 0 . . . 0 00 1 λ . . . 0 0. . . . . . . .0 0 0 . . . λ 00 0 0 . . . 1 λ
∈Mkk(F )
Macierzą Jordana nazywamy macierz, która wzdłuż głównej przekątnej maumieszczone klatki Jordana, a poza tym klatkami — same zera.
Twierdzenie 10.2.7. (Jordana) F Dowolny endomorfizm skończenie wymiaro-wej zespolonej przestrzeni liniowej ma w pewnej bazie macierz Jordana. Rozkładna klatki Jordana jest jednoznaczny z dokładnością do ich kolejności.
Dokładniej, jeżeli λ ∈ C jest wartością własną o krotności m endomorfizmuϕ : V → V , (p1, . . . , pj0) jest rozkładem charakterystycznym tej krotności, tomacierz endomorfizmu ϕ|V λm ma w pewnej bazie postać Jordana, przy czym dlak = 1, . . . , j0 macierz ta zawiera dokładnie pk − pk+1 klatek Jk(λ).
Dowód: J. Komorowski, Od liczb zespolonych do tensorów, spinorów, algebrLiego i kwadryk. �
Definicja 10.2.8. Śladem macierzy kwadratowej A = [aij ] ∈ Mnn(F ) nazy-wamy skalar
tr A =n∑i=1
aii
26
Stwierdzenie 10.2.9. Jeżeli D i E są macierzami endomorfizmu ϕ odpowied-nio w bazach D i E , to
detD = detE, trD = trE
Dowód: Ze stw. 3.5.6 wynika, że E = CDC−1, gdzie C = MDE .Z tw. Cauchy’ego mamy zatem
detE = detC · detD · (detC)−1 = detD.
Zauważmy teraz, że ślad iloczynu dwóch macierzy nie zależy od kolejnościczynników. Istotnie, jeżeli A = [aij ], B = [bkl] ∈Mnn, to
tr (AB) =n∑i=1
n∑j=1
aijbji =n∑k=1
n∑l=1
bklalk = tr (BA).
ZatemtrE = tr
(CDC−1) = tr
(DC−1C
)= trD.
�
Wniosek 10.2.10. Wyznacznik macierzy endomorfizmu przestrzeni zespolonejjest iloczynem wszystkich wartości własnych tego endomorfizmu licząc z krot-nościami, a ślad macierzy endomorfizmu — sumą wszystkich wartości własnychtego endomorfizmu licząc z krotnościami
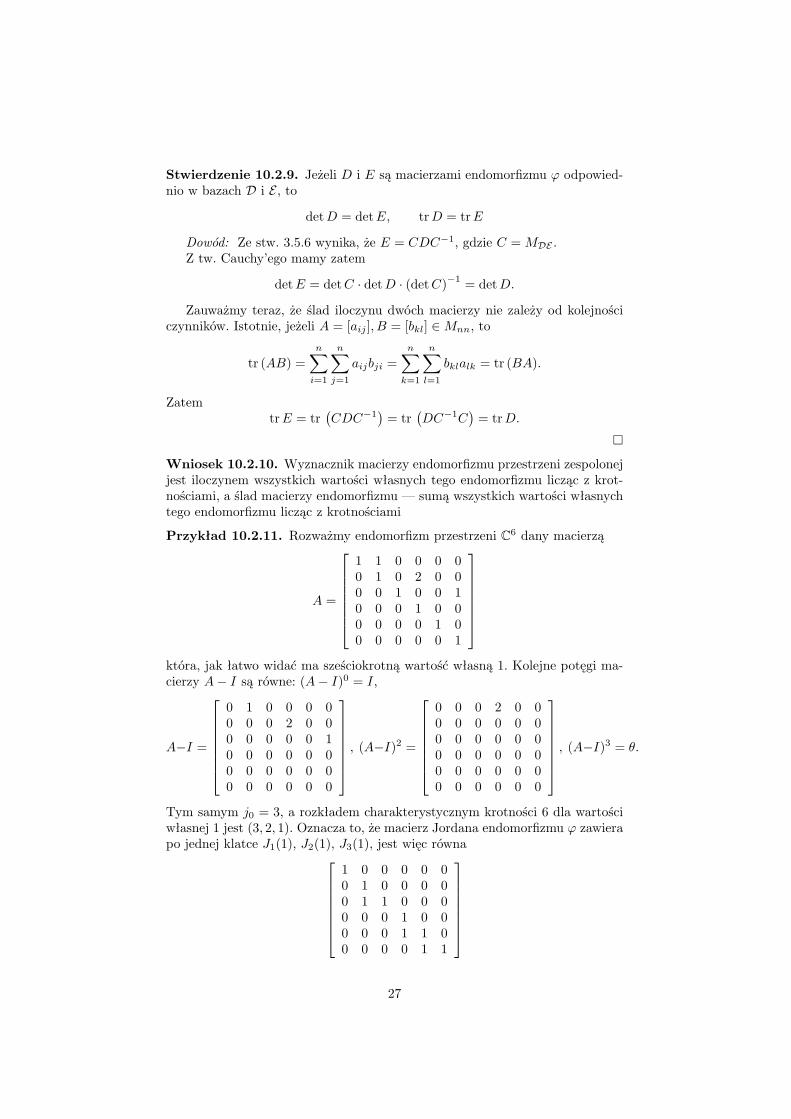
Przykład 10.2.11. Rozważmy endomorfizm przestrzeni C6 dany macierzą
A =
1 1 0 0 0 00 1 0 2 0 00 0 1 0 0 10 0 0 1 0 00 0 0 0 1 00 0 0 0 0 1
która, jak łatwo widać ma sześciokrotną wartość własną 1. Kolejne potęgi ma-cierzy A− I są równe: (A− I)0 = I,
A−I =
0 1 0 0 0 00 0 0 2 0 00 0 0 0 0 10 0 0 0 0 00 0 0 0 0 00 0 0 0 0 0
, (A−I)2 =
0 0 0 2 0 00 0 0 0 0 00 0 0 0 0 00 0 0 0 0 00 0 0 0 0 00 0 0 0 0 0
, (A−I)3 = θ.
Tym samym j0 = 3, a rozkładem charakterystycznym krotności 6 dla wartościwłasnej 1 jest (3, 2, 1). Oznacza to, że macierz Jordana endomorfizmu ϕ zawierapo jednej klatce J1(1), J2(1), J3(1), jest więc równa
1 0 0 0 0 00 1 0 0 0 00 1 1 0 0 00 0 0 1 0 00 0 0 1 1 00 0 0 0 1 1
27

Definicja 10.2.12. Uogólnioną klatką Jordana nazywamy macierz
J2k(α, β) =
A 0 0 . . . 0 0I A 0 . . . 0 00 I A . . . 0 0. . . . . . . .0 0 0 . . . A 00 0 0 . . . I A
∈M2k,2k(R)
gdzie α, β ∈ R oraz
A =[
α β−β α
], I =
[1 00 1
]Wniosek 10.2.13. (uogólniony rozkład Jordana w przestrzeni rzeczywistej)Jeżeli ϕ jest endomorfizmem skończenie wymiarowej rzeczywistej przestrzeniliniowej V , to istnieje baza tej przestrzeni, w której endomorfizm ϕ ma ma-cierz będącą w uogólnionej postaci Jordana. Oznacza to , że wzdłuż przekątnejumieszczone są klatki Jordana lub uogólnione klatki Jordana, a poza nimi wmacierzy są same zera.
11 Grupy przekształceń i geometrie nieeuklide-sowe
11.1 Grupy i działania grup na przestrzeniach
Definicja 11.1.1. Grupą nazywamy parę uporządkowaną (G, ·), gdzie G jestzbiorem niepustym oraz · : G×G→ G, spełniającą warunki:
(G1) ∀a,b,c∈G (a · b) · c = a · (b · c)(G2) ∃e∈G ∀a∈G a · e = e · a = a
(G3) ∀a∈G ∃a−1∈G a · a−1 = a−1 · a = e
Definicja 11.1.2. Podgrupą grupy (G, ·) nazywamy niepusty podzbiór H ⊂ Gspełniający warunek
(SG) ∀a,b∈H a · b−1 ∈ H
Przykład 11.1.3. 1. (Rn,+) jest grupą, a Zn jest jej podgrupą.
2. (GL(n,F), ·) jest grupą, a SL(n,F) = {A ∈ Mnn(F) ; detA = 1} jest jejpodgrupą.
Definicja 11.1.4. Niech (G, ·) i (H, ∗) będą grupami, a ϕ funkcją działającą zG w H. Mówimy, że ϕ jest homomorfizmem (grup), jeżeli spełnia warunek
(H) ∀a,b∈G ϕ(a · b) = ϕ(a) ∗ ϕ(b)
Izomorfizmem (grup) nazywamy homomorfizm, który jest jednocześnie bijekcją.Mówimy, że grupy (G, ·) i (H, ∗) są izomorficzne i piszemy (G, ·) ∼= (H, ∗), gdyistnieje izomorfizm grupy (G, ·) na grupę (H, ∗).
28

Przykład 11.1.5. 1. Tożsamość idG jest izomorfizmem grupy (G, ·).
2. Funkcja G 3 a 7→ eH ∈ H jest homomorfizmem grupy (G, ·) w grupę(H, ∗).
3. Grupy (R,+) i (R+, ·) są izomorficzne poprzez dowolną funcję wykładnicząx 7→ ax , gdzie a > 0 i a 6= 1.
4. Bijekcje ustalonego niepustego zbioru X stanowią grupę z działaniem skła-dania funkcji.
5. Izomorfizmy liniowe ustalonej przestrzeni liniowej na siebie tworzą grupęz działaniem składania.
Definicja 11.1.6. Mówimy, że grupa (G, ·) działa na zbiorze X i piszemy GyX, gdy istnieje homomorfizm grupy G w grupę bijekcji zbioru X. Innymi słowy,jeżeli każdemu elementowi g ∈ G przypisujemy bijekcję ψ(g) : X → X, tospełniony jest warunek
∀g,g′∈G ∀x∈X ψ(g · g′)(x) = ψ(g) (ψ(g′)(x))
Zamiast ψ(g)(x) piszemy często po prostu gx.Możemy mówić o działaniu grupy G na zbiorze X poprzez homeomorfzimy,
izometrie, dyfeomorfizmy, przekształcenia liniowe itd., o ile w zbiorze X okre-ślona jest odpowiednio struktura topologiczna, metryczna, różniczkowa, liniowaitd., a elmentom grupy G przypisane są odpowiednio homeomorfzimy, izometrie,dyfeomorfizmy, przekształcenia liniowe itd.
Przykład 11.1.7. 1. Grupa GL(n,F) działa na przestrzeni Fn w taki spo-sób, że macierzy nieosobliwej A odpowiada izomorfizm, dla którego A jestmacierzą w bazie kanonicznej tzn. ψ(A)(x) = Ax.
2. Grupa (V,+) działa na przestrzeni afinicznej (E, V,→) za pomocą trans-lacji, tzn. ψ(v) = Tv.
3. Grupa S1 = {z ∈ C ; |z| = 1} (z działaniem mnożenia liczb zespolonych)działa na płaszczyźnie zespolonej C za pomocą obrotów, tzn. ψ(z) jest dlaz ∈ S1 obrotem dookoła 0 o kąt arg z.
Definicja 11.1.8. Załóżmy, że grupa G działa na zbiorze X. Orbitą punktux ∈ X nazywamy zbiór
Gx = {gx ; g ∈ G} ⊂ X.
Stabilizatorem punktu x ∈ X nazywamy zbiór
Stab (x) = {g ∈ G ; gx = x} ⊂ G.
Definicja 11.1.9. Mówimy, że działanie grupy G na zbiorze X jest
1. przechodnie, gdy dla każdych x, x′ ∈ X istnieje takie g ∈ G, że gx = x′.
2. wolne, jeżeli z faktu, że dla pewnego x ∈ X zachodzi gx = x wynika, żeg = e.
29

3. efektywne (lub wierne), gdy homomorfizm ψ jest różnowartościowy.
Przykład 11.1.10. 1. Przy działaniu S1 na C: G0 = {0} oraz Gz = {w ∈C ; |w| = |z|} dla z 6= 0, zaś Stab (0) = S1 oraz Stab (z) = {1} dla z 6= 0.
Działanie to nie jest więc ani przechodnie, ani wolne, ale jest wierne.
2. działanie (V,+) na przestrzeni afinicznej (E, V,→) jest wolne, przechodniei efektywne.
Definicja 11.1.11. Niech homomorfizm ψ określa jak grupa (H, ∗) działa nagrupę (G, ·). Zbiór G×H z działaniem � określonym wzorem
(g, h)�(g′, h′) = (g · (ψ(h)(g′)), h ∗ h′) dla (g, h), (g′, h′) ∈ G×H
nazywamy iloczynem półprostym grup G oraz H i oznaczamy przez GoH.
11.2 Izometrie przestrzeni euklidesowej
Definicja 11.2.1. Niech V , W będą przestrzeniami liniowymi z iloczynem ska-larnym, zaś ϕ : V →W przekształceniem liniowym. Odwzorowanie ϕ nazywamyprzekształceniem ortogonalnym, gdy zachowuje iloczyn skalarny, to znaczy gdy
(OM) ∀v1,v2∈V 〈ϕ(v1), ϕ(v2)〉 = 〈v1, v2〉
(po lewej stronie równości stosujemy iloczyn skalarny w przestrzeni W , a poprawej — w przestrzeni V ).
Stwierdzenie 11.2.2. Przekształcenia ortogonalne ustalonej przestrzeni eukli-desowej liniowej w siebie, z działaniem składania, stanowią grupę.
Dowód: Niech (V, 〈., .〉) będzie przestrzenią euklidesową liniową.Zauważmy, że każde przekształcenie ortogonalne ϕ : V → V jest różnowar-
tościowe. Na mocy stw. 9.13 wystarczy pokazać, że jadro przekształcenia ϕ jesttrywialne. Z faktu ϕ(v) = θ wynika na mocy definicji przekształcenia ortogo-nalnego, że 〈ϕ(v), ϕ(v)〉 = 0 = 〈v, v〉, co wraz z (IP3) daje v = θ.
Różnowartościowość przekształcenia ortogonalnego V → V zgodnie ze stw.9.15 gwarantuje, że przekształcenie to jest izomorfizmem.
Wystarczy zatem pokazać, że przekształcenia ortogonalne przestrzeni V sta-nowią podgrupę jej izomorfizmów.
Biorąc przekształcenia ortogonalne ϕ oraz ψ przestrzeni V w nią samą otrzy-mujemy z definicji dla v1, v2 ∈ V :
〈ψ ◦ ϕ(v1), ψ ◦ ϕ(v2)〉 = 〈ϕ(v1), ϕ(v2)〉 = 〈v1, v2〉,
co wraz ze stw. 9.6(2) daje ortogonalność przekształcenia ψ ◦ ϕ.Ponadto ze stw. 9.6(3) wynika, że ϕ−1 jest izomorfizmem, a definicja prze-
kształcenia ortogonalnego pociąga za sobą dla v1, v2 ∈ V równość
〈ϕ−1(v1), ϕ−1(v2)〉 = 〈ϕ ◦ ϕ−1(v1), ϕ ◦ ϕ−1(v2)〉 = 〈v1, v2〉,
co oznacza ortogonalność przekształcenia ϕ−1. �
Przykład 11.2.3. 1. Tożsamość jest przekształceniem ortogonalnym dowol-nej przestrzeni z iloczynem skalarnym na siebie.
30

2. Symetria środkowa v 7→ −v jest przekształceniem ortogonalnym dowolnejprzestrzeni z iloczynem skalarnym na siebie.
3. Sprzężenie z 7→ z jest przekształceniem ortogonalnym przestrzeni CR zestandardowym iloczynem skalarnym na siebie.
Definicja 11.2.4. Macierz A ∈Mnn(R) nazywamy macierzą ortogonalną stop-nia n, gdy AAT = I.
Zbiór wszystkich macierzy ortogonalnych stopnia n oznaczamy przez O(n), apozbiór zawierający te spośród nich, które mają wyznacznik 1 — przez SO(n).
Stwierdzenie 11.2.5. Zbiór O(n) z działaniem mnożenia macierzowego sta-nowi grupę, której podgrupą jest SO(n).
Dowód: Z definicji, tw. Cauchy’ego (12.17) i ze stw. 12.4 wynika, że macierzortogonalna ma wyznacznik równy ±1.
Wystarczy więc pokazać, żeO(n) jest podgrupą ogólnej grupy liniowejGL(n,R).Dla A,B ∈ O(n) spełniony jest warunek AAT = I = BBT , co wraz ze
własnościami transpozycji (stw. 11.18(3)) daje
(AB)(AB)T = (AB)(BTAT
)= A
(BBT
)AT = AAT = I,
czyli ortogonalność macierzy AB.Dla dowodu ortogonalności macierzy A−1, gdzie A ∈ O(n), wystarczy za-
uważyć, że A−1 = AT i ATA = A−1A = AA−1 = AAT = I, skąd natychmiast(stw. 11.8(4)) wynika, że
A−1 (A−1)T = AT(AT)T
= ATA = I.
SO(n) jest podgrupą O(n) na mocy tw. Cauchy’ego. �
Przykład 11.2.6. Macierz A =[a bc d
]jest ortogonalna wtedy i tylko wtedy,
gdy spełnione są warunki a2 + b2 = 1ac+ bd = 0c2 + d2 = 1
Z pierwszego i trzeciego z nich otrzymujemy istnienie takich α oraz β, że
a = cosα, b = − sinα, c = sinβ, d = cosβ,
a wówczas z drugiego sin(β−α) = 0. Wystarczy rozważyć przypadki β = α lubβ = π + α i obliczyć wyznaczniki, aby zauważyć, że
SO(2) ={[
cosα − sinαsinα cosα
]; α ∈ [0, 2π)
}oraz
O(2) = SO(2) ∪{[
cosα − sinα− sinα − cosα
]; α ∈ [0, 2π)
}Stwierdzenie 11.2.7. A jest macierzą przekształcenia ortogonalnego prze-strzeni Rn ze standardowym iloczynem skalarnym w siebie (w bazie kanonicznej)wtedy i tylko wtedy, gdy A ∈ O(n).
31

Dowód: W przestrzeni Rn standardowy iloczyn skalarny jest dany wzorem
〈v, w〉 = vTw
(wektory v, w ∈ Rn traktujemy jako macierze n×1). Zatem jeżeli A jest macierząprzekształcenia liniowego ϕ : Rn → Rn w bazie kanonicznej, to dla v, w ∈ Rn
〈ϕ(v), ϕ(w)〉 = 〈Av,Aw〉 = vTATAw.
⇒) Jeżeli A jest macierzą przekształcenia ortogonalnego ϕ : Rn → Rn wbazie kanonicznej, to vTw = vTATAw dla dowolnych v, w ∈ Rn. Biorąc za v iw wektory bazy kanonicznej, odpowiednio ei i ej otrzymujemy, że wyraz (i, j)macierzy ATA jest równy δij , i, j = 1, . . . , n. Zatem ATA = I, czyli A ∈ O(n).⇐) Jeżeli A ∈ O(n), to przekształcenie liniowe ϕ : v 7→ Av ma w bazie
kanonicznej macierz A oraz zachowuje iloczyn skalarny, bo ATA = I. �
Definicja 11.2.8. Izometrią przestrzeni euklidesowej E nazywamy funkcję prze-kształcającą E na E i zachowującą odległość, to znaczy spełniającą warunek
(I) ∀x,y∈E |f(x)f(y)| = |xy|.
Zbiór wszystkich izometrii przestrzeni E oznaczamy przez Isom (E).
Stwierdzenie 11.2.9. Izometrie dowolnej przestrzeni euklidesowej z działa-niem składania tworzą grupę.
Dowód: Każda izometria jest przekształceniem różnowartościowym, bo zwłasności normy (N1) wynika równoważność
f(x) = f(y)⇔−−−−−−→f(x)f(y) = θ ⇔ |f(x)f(y)| = 0⇔ |xy| = 0⇔ −→xy = θ ⇔ x = y.
Zatem każda izometria f : E → E jako przekształcenie ńa”jest bijekcją i tymsamym posiada przekształcenie odwrotne f−1. Wystarczy więc pokazać, że dlaf, g ∈ IsomE spełnione są warunki f ◦g ∈ IsomE oraz f−1 ∈ IsomE, co wynikaz definicji:
|f ◦ g(x), f ◦ g(y)| = |g(x), g(y)| = |xy|∣∣f−1(x), f−1(y)∣∣ =
∣∣f ◦ f−1(x), f ◦ f−1(y)∣∣ = |xy|.
�
Przykład 11.2.10. 1. Translacja Tv : x 7→ x+ v jest izometrią. Istotnie,
|Tv(x)Tv(y)| =∥∥∥−−−−−−−−→x+ v, y + v
∥∥∥ = ‖−→xy‖ = |xy|.
2. W przestrzeni En przekształcenie dane wzorem
x 7→ A ·−→θx+ b
(lub krótko Ax+ b), gdzie A ∈ O(n), b ∈ Rn, jest izometrią, bo jego prze-kształceniem liniowym jest przekształcenie ortogonalne (czyli zachowującetakże normę) o macierzy A (por. stw. 22.7).
32

Definicja 11.2.11. Niech H będzie podprzestrzenią afiniczną przestrzeni eu-klidesowej E. Funkcję sH : E → E daną wzorem
sH(x) = x+ 2−−−−−→xπH(x) dla x ∈ E
(πH oznacza rzut ortogonalny na podprzestrzeń H) nazywamy symetrią wzglę-dem podprzestrzeni H.
Przykład 11.2.12. 1. Symetria środkowa sp = s{p} dla dowolnego p ∈ Ejest dana wzorem
sp(x) = x+ 2−→xp = p+−→xp,
bo rzutowanie πp odbywa się na jedyny punkt p.
2. Jeżeli H jest hiperpłaszczyzną w E, p ∈ H, a v jest jednostkowym wek-torem normalnym do H (innymi słowy H = p + v⊥), to symetria hiper-płaszczyznowa względem H wyraża się wzorem
sH(x) = x− 2〈−→px, v〉v,
gdyż 〈−→px, v〉v jest składową wektora −→px równoległą do wektora v rozpina-jącego przestrzeń S(H)⊥, więc
πH(x) = p+ projS(H)(−→px) = p+−→px− 〈−→px, v〉v = x− 〈−→px, v〉v.
3. W przestrzeni E2 prosta jest hiperpłaszczyzną.
Jeżeli prosta L nie jest równoległa do drugiej osi, to ma równanie postaciy = mx + n, można więc przyjąć w poprzednim przykładzie p = (0, n)oraz v = 1√
1+m2(m,−1), skąd
sL((x, y)) =(
(1−m2)x+ 2my − 2mn1 +m2 ,
2mx− (1−m2)y + 2n1 +m2
).
Jeżeli zaś prosta L jest równoległa do drugiej osi, to ma równanie postacix = c. Wówczas p = (c, 0), v = (1, 0), skąd
sL((x, y)) = (2c− x, y).
Stwierdzenie 11.2.13. Niech H będzie podprzestrzenią afiniczną przestrzenieuklidesowej E. Symetria sH względem podprzestrzeni H ma następujące wła-sności:
1. sH jest inwolucją, tzn. sH ◦ sH = idE ;
2. sH jest izometrią;
3. podprzestrzeń H jest zbiorem wszystkich punktów stałych prekształceniasH , tzn. sH(x) = x wtedy i tylko wtedy, gdy x ∈ H.
Dowód: Oznaczmy przez s symetrię względem podprzestrzeni H, a przez π— rzut ortogonalny na tę podprzestrzeń.
33

1. Dla x ∈ E z uwagi na−−−→xπ(x) ⊥ H mamy
s ◦ s(x) = s(x+ 2
−−−→xπ(x)
)= x+ 2
−−−→xπ(x) + 2
−−−−−−−−−−−−−−−−−−−−−−−→(x+ 2
−−−→xπ(x)
)π(x+ 2
−−−→xπ(x)
)= x+ 2
−−−→xπ(x) + 2
−−−−−−−−−−−−−−→(x+ 2
−−−→xπ(x)
)π(x) = x+ 2
−−−→xπ(x)− 2
−−−→xπ(x) = x.
2. Z definicji symetrii dla x, y ∈ E otrzymujemy
−−−−−→s(x)s(y) =
−−−−−→s(x)π(x) +
−−−−−−→π(x)π(y) +
−−−−−→π(y)s(y)
=−−−−−−−−−−−−−−→(x+ 2
−−−→xπ(x)
)π(x) +
−−−−−−→π(x)π(y) +
−−−−−−−−−−−−−−→π(y)
(x+ 2
−−−→xπ(x)
)= −
(−−−→xπ(x) +
−−−→yπ(y)
)+−−−−−−→π(x)π(y)
i ostatni wektor, jako należący do S(H), jest ortogonalny do sumy dwóchpozostałych (bo każdy z nich należy do S(H)⊥). Stąd i z twierdzeniaPitagorasa otrzymujemy
|s(x)s(y)|2 =∥∥∥−−−−−→s(x)s(y)
∥∥∥2=∥∥∥−−−→xπ(x) +
−−−→yπ(y)
∥∥∥2+∥∥∥−−−−−−→π(x)π(y)
∥∥∥2
=∥∥∥−−−→xπ(x) +
−−−→yπ(y) +
−−−−−−→π(x)π(y)
∥∥∥2= ‖−→xy‖2 = |xy|,
co wraz z wzajemną jednoznacznością s (wynika z inwolutywności) dajeizometryczność tego przekształcenia.
3. Dla x ∈ E mamy
s(x) = x⇔ 2−−−→xπ(x) = θ ⇔ x = π(x)⇔ x ∈ H.
�
Twierdzenie 11.2.14. (Mazura–Ulama) F Każda izometria przestrzeni eukli-desowej jest przekształceniem afinicznym.
Dowód: Niech E będzie przestrzenią euklidesową, f ∈ Isom(E) i niech p ∈ E,q = f(p). Wówczas dla x ∈ E
f(p) +−−−→qf(x) = f(x) = f (p+−→px) .
Przyjmując ϕ (−→px) =−−−→qf(x) widzimy, że na mocy stwierdzenia 17.4 afiniczność
przekształcenia f wynika z liniowości przekształcenia ϕ.Pokażemy najpierw, że ϕ jest przekształceniem jednorodnym. Niech a ∈ R
i x ∈ E. Kładąc x′ = x + a−→px otrzymujemy−→px′ = a−→px. Tym samym punkty
p, x, x′ są współliniowe, więc jeden z nich należy do odcinka o końcach w pozo-stałych punktach. Możliwe są więc przypadki:
I. x′ ∈ pxII. x ∈ px′III. p ∈ xx′Rozważmy przypadek I. Gdy p = x, to p = x′ = x, czyli
−−−−→qf(x′) = θ =
a−−−→qf(x).
34

Jeżeli p 6= x, to z lematu o odcinku (stw. 19.15) wynika, że
|px′|+ |x′x| = |px|,
a ponieważ izometria f zachowuje odległości, także
|f(p)f(x′)|+ |f(x′)f(x)| = |f(p)f(x)|.
Stosując ponownie lemat o odcinku wnioskujemy, że f(x′) ∈ qf(x). Zatem ist-
nieje b ∈ [0, 1] takie, że−−−−→qf(x′) = b
−−−→qf(x), co wraz z powyższymi warunkami na
odległość daje
a ‖−→px‖ =∥∥∥−→px′∥∥∥ =
∥∥∥−−−−→qf(x′)∥∥∥ = b
∥∥∥−−−→qf(x)∥∥∥ = b ‖−→px‖ ,
skąd na mocy p 6= x otrzymujemy a = b, czyli ϕ (−−→a px) = aϕ (−→px), co kończydowód jednorodności w przypadku I. Przypadki II i III rozważamy analogicznie.
Aby wykazać addytywność przekształcenia ϕ zauważmy najpierw, że izome-tria na mocy lematu o odcinku zachowuje środek odcinka, tzn. dla x, y ∈ E
f
(12x+
12y
)=
12f(x) +
12f(y).
To z kolei wraz z udowodnioną właśnie jednorodnościa pociąga za sobą ciągrówności
ϕ (−→px+−→py) = 2ϕ(
12−→px+
12−→py)
= 2−−−−−−−−−−→qf
(12x+
12y
)= 2−−−−−−−−−−−−→q,
12f(x) +
12f(y)
= 2(
12−−−→qf(x) +
12−−−→qf(x)
)= ϕ (−→px) + ϕ (−→py)
Ostatecznie ϕ spełnia (LM1) i (LM2), jest więc przekształceniem liniowym,a izometria f — przekształceniem afinicznym. �
Wniosek 11.2.15. Isom(En) ∼= Rn oO(n),czyli grupa izometrii przestrzeni En (z działaniem składania) jest izomorficznaz iloczynem półprostym grup (Rn,+) oraz (O(n), ·).
Dowód: szkic Bridson, Haefliger, Metric Spaces of Nonpositive Curvature �
Uwaga 11.2.16. Klasyfikacja izometrii przestrzeni En stanowi, że wszystkieizometrie tej przestrzeni są postaci opisanej w przykładzie 11.2.10(2).
Uwaga 11.2.17. Podobnie można pokazać, że przekształcenie liniowe związanez izometrią jest ortogonalne, a dla dowolnej przestrzeni euklidesowej E mamyIsom(E) ∼= V o O(V ), gdzie V = S(E), zaś O(V ) jest grupą przekształceńortogonalnych przestrzeni V w siebie.
Twierdzenie 11.2.18. Każda izometria n–wymiarowej przestrzeni euklideso-wej jest złożeniem symetrii hiperpłaszczyznowych w liczbie nie przekraczającejn+ 1.
35