advanced drivetrain calculations john e. v-neun, team 229 john a. neun, p.e., team 20
Post on 20-Dec-2015
218 views
TRANSCRIPT
Advanced Drivetrain Advanced Drivetrain CalculationsCalculations
John E. V-Neun, Team 229John E. V-Neun, Team 229
John A. Neun, P.E., Team 20John A. Neun, P.E., Team 20
Goals for this SessionGoals for this SessionFoundation for Gearbox DesignFoundation for Gearbox Design Review principles in drivetrain designReview principles in drivetrain design Examine trade-offsExamine trade-offs Formulas for modeling and designFormulas for modeling and design Sample CalculationSample Calculation
PrerequisitesPrerequisites Assume basic familiarity with:Assume basic familiarity with:
Principles of Physics and Principles of Physics and CalculusCalculus Forces, Power, Torque, Forces, Power, Torque,
Acceleration, Friction, Rotational Acceleration, Friction, Rotational vs. Linear Motionvs. Linear Motion
Principles of DC MotorsPrinciples of DC Motors Principles of Gear TrainsPrinciples of Gear Trains Ken and Paul’s seminarKen and Paul’s seminar
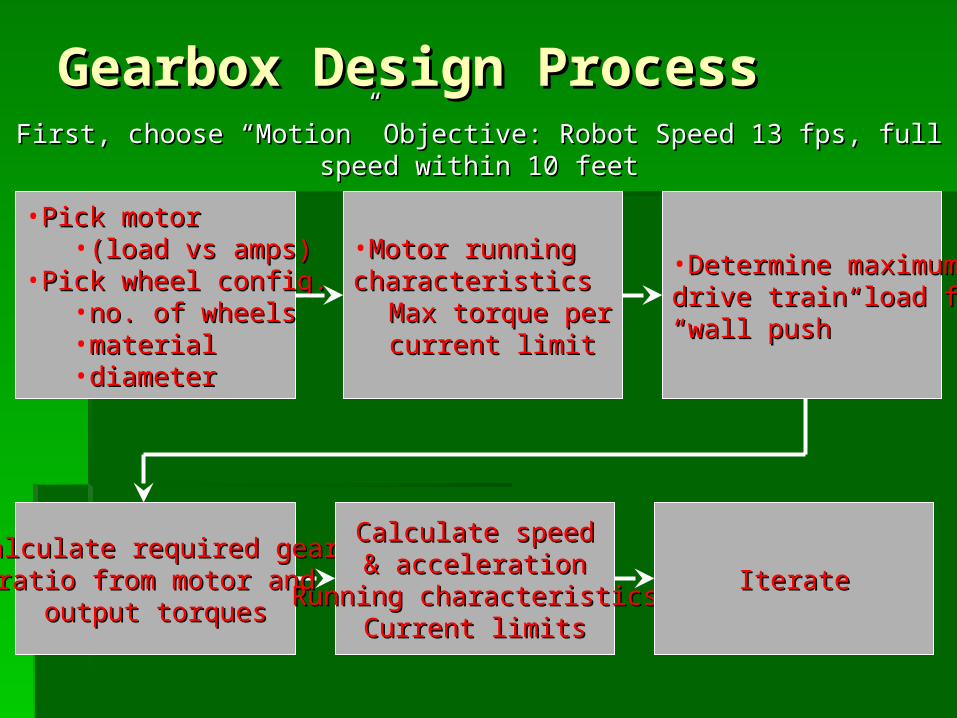
•Determine maximumDetermine maximumdrive train load fromdrive train load from““wall push”wall push”
•Motor running Motor running characteristicscharacteristics
Max torque per Max torque per current limitcurrent limit
Gearbox Design ProcessGearbox Design Process
•Pick motor Pick motor •(load vs amps)(load vs amps)
•Pick wheel config.Pick wheel config.•no. of wheelsno. of wheels•materialmaterial•diameterdiameter
Calculate required gearCalculate required gearratio from motor andratio from motor and
output torquesoutput torques
Calculate speedCalculate speed& acceleration& acceleration
Running characteristicsRunning characteristicsCurrent limitsCurrent limits
IterateIterate
First, choose “Motion” Objective: Robot Speed 13 fps, full speed within 10 feetFirst, choose “Motion” Objective: Robot Speed 13 fps, full speed within 10 feet
Transmission Goal: Transmission Goal: Translate Motor Motion and Translate Motor Motion and Power into Robot MotivationPower into Robot Motivation
MotorMotor Speed (rpm)Speed (rpm) TorqueTorque
RobotRobot Speed (fps)Speed (fps) WeightWeight
First AnalysisFirst AnalysisPushing against a wall…Pushing against a wall…
Objective: Determine maximum load limitObjective: Determine maximum load limit System must withstand max loadSystem must withstand max load
Run continuously under maximum loadRun continuously under maximum load Not overload motorsNot overload motors Not overload circuit breakersNot overload circuit breakers (Not break shafts, gears, etc.)(Not break shafts, gears, etc.)
Suboptimum – ignore limit (risk failure)Suboptimum – ignore limit (risk failure)
Pushing against a wall…Pushing against a wall… Known Factors:Known Factors:
Motor UsageMotor Usage Motor CharacteristicsMotor Characteristics
Wheel FrictionWheel Friction Max Motor Load (at 40 amps)Max Motor Load (at 40 amps)
Solve For:Solve For: Required Gear RatioRequired Gear Ratio
Robot WeightRobot WeightMotor specsMotor specsFrictional coef.Frictional coef.
SpeedSpeedaccelerationaccelerationGear RatioGear Ratio
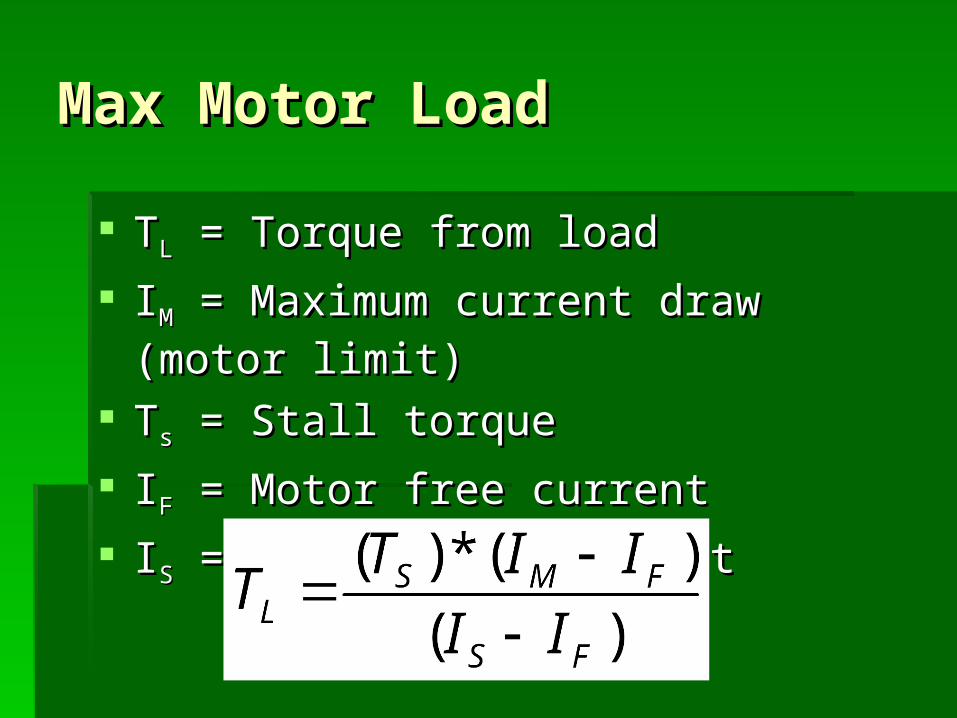
Max Motor LoadMax Motor Load
TTLL = Torque from load = Torque from load
IIMM = Maximum current draw (motor limit) = Maximum current draw (motor limit)
TTss = Stall torque = Stall torque
IIFF = Motor free current = Motor free current
IISS = Motor stall current = Motor stall current
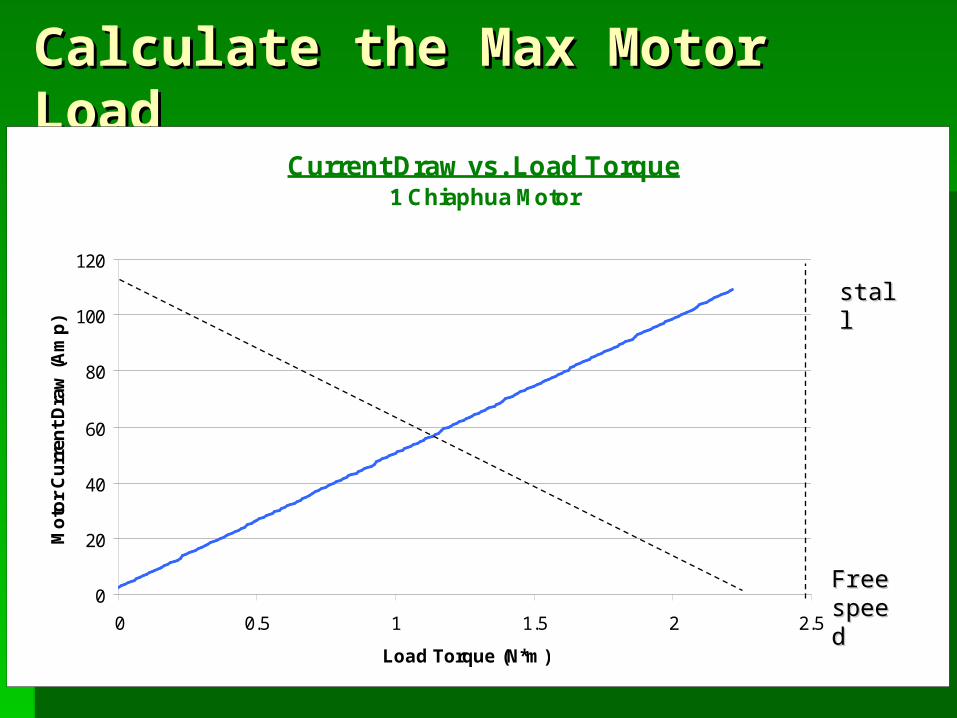
Calculate the Max Motor Calculate the Max Motor LoadLoad
Current Draw vs. Load Torque1 Chiaphua Motor
0
20
40
60
80
100
120
0 0.5 1 1.5 2 2.5
Load Torque (N*m)
Mo
tor
Cu
rren
t D
raw
(A
mp
)
stallstall
Free Free speedspeed
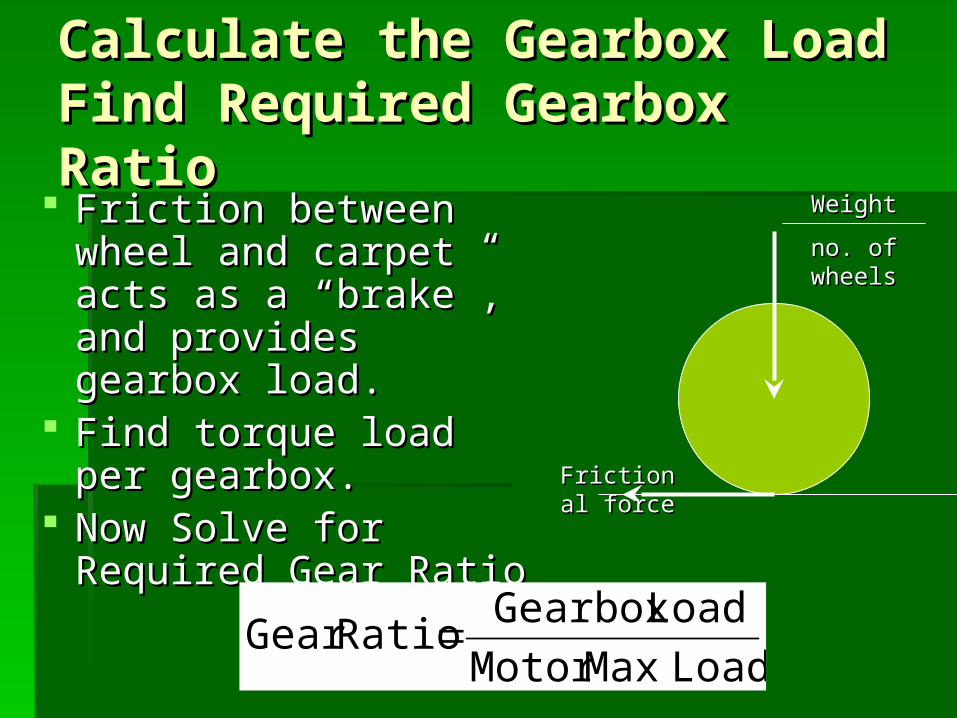
Calculate the Gearbox LoadCalculate the Gearbox LoadFind Required Gearbox Find Required Gearbox RatioRatio
Friction between wheel Friction between wheel and carpet acts as a and carpet acts as a “brake”, and provides “brake”, and provides gearbox load.gearbox load.
Find torque load per Find torque load per gearbox.gearbox.
Now Solve for Required Now Solve for Required Gear RatioGear Ratio
LoadMax Motor
LoadGearbox RatioGear
WeightWeight
no. of wheelsno. of wheels
Frictional Frictional forceforce
Check Robot SpeedCheck Robot Speed How fast will the robot go with this How fast will the robot go with this
required gear ratio?required gear ratio?
Remember Units!!!Remember Units!!!
Loss Speed * RatioGear * RPMMotor RPMOutput
Conversion Unit *nceCircumfera Wheel*
RPMOutput Velocity Robot
Is this fast enough?Is this fast enough? Major Design Compromise…Major Design Compromise… Is this speed fast enough?Is this speed fast enough? No?No?
Decrease Gearbox LoadDecrease Gearbox Load Increase Gearbox PowerIncrease Gearbox Power Live with the low speed…Live with the low speed… Design two speeds! Design two speeds!
Low speed/high forceLow speed/high force High speed/low forceHigh speed/low force
Risk failureRisk failure Design is all about tradeoffsDesign is all about tradeoffs
Secondary AnalysisSecondary AnalysisPlotting AccelerationPlotting Acceleration
Calculate Motor Current Draw and Robot Calculate Motor Current Draw and Robot Velocity over time (during robot Velocity over time (during robot acceleration).acceleration).
Time to top speedTime to top speed Important to show how drivetrain will perform Important to show how drivetrain will perform
(or NOT perform!)(or NOT perform!) If a robot takes 50 feet to accelerate to top If a robot takes 50 feet to accelerate to top
speed, it probably isn’t practical!speed, it probably isn’t practical!
Plotting AccelerationPlotting Acceleration
Voltage to resting motorVoltage to resting motor Start at stall condition (speed = 0)Start at stall condition (speed = 0) Stall torque Stall torque initial acceleration initial acceleration
Robot acceleratesRobot accelerates Motor leaves stall conditionMotor leaves stall condition Force decreases as speed increases.Force decreases as speed increases.
Instantaneous Motor TorqueInstantaneous Motor Torque
When Motor RPM = 0, When Motor RPM = 0,
Output Torque = Stall TorqueOutput Torque = Stall Torque When Motor RPM = free speedWhen Motor RPM = free speed
Output Torque = 0 (in theory)Output Torque = 0 (in theory) (.81)(.81)
Torque Stall RPMMotor * )Speed Free
Torque Stall(- TorqueMotor
Gearbox Torque OutputGearbox Torque OutputRobot Accelerating ForceRobot Accelerating Force
Efficiency * Ratio Gear * TorqueMotor TorqueGearbox
)Radius Wheel
TorqueGearbox (*2 Forceon Accelerati
Instantaneous Instantaneous Acceleration and VelocityAcceleration and Velocity
Instantaneous Acceleration (dependant on Instantaneous Acceleration (dependant on robot velocity, as seen in previous equations).robot velocity, as seen in previous equations).
The instantaneous velocity can be numerically The instantaneous velocity can be numerically calculated as follows:calculated as follows:
MassRobot
ResistanceFriction - Forceon Accelerati on Accelerati
t)(* V V 112 (thanks, Isaac)(thanks, Isaac)
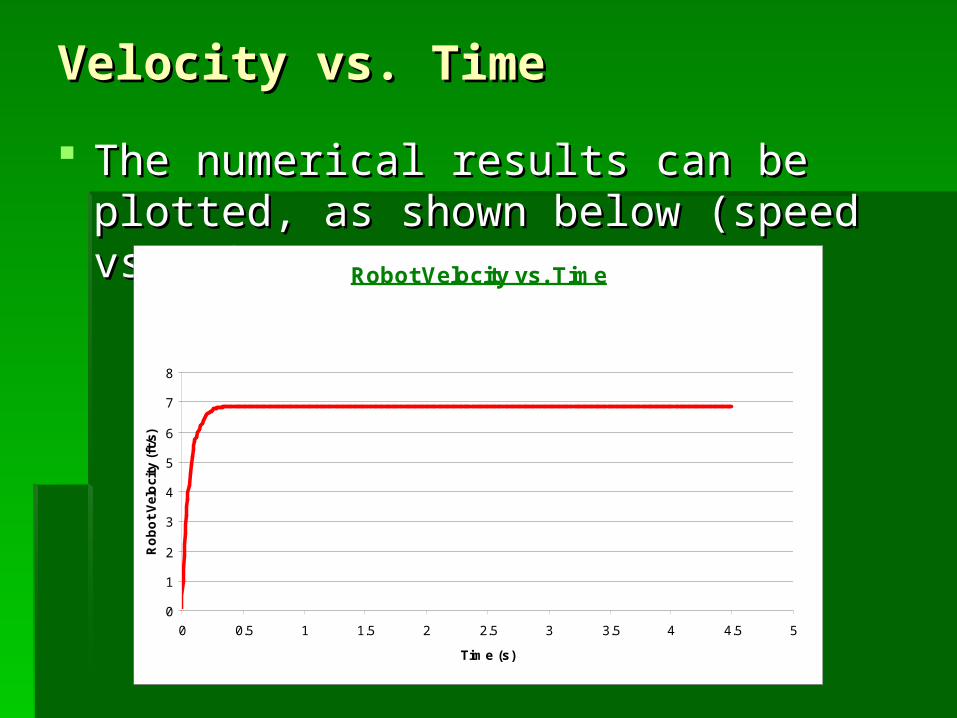
Velocity vs. TimeVelocity vs. Time
The numerical results can be plotted, as The numerical results can be plotted, as shown below (speed vs. time):shown below (speed vs. time):
Robot Velocity vs. Time
0
1
2
3
4
5
6
7
8
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
Time (s)
Ro
bo
t V
elo
city
(ft
/s)
Current Draw ModelingCurrent Draw Modeling
The current drawn by a motor can be The current drawn by a motor can be modeled vs. time too.modeled vs. time too.
Current is linearly proportional to torque Current is linearly proportional to torque output (torque load) of the motor.output (torque load) of the motor.
Current Free Load Torque *Torque Stall
Current Free -Current Stall DrawCurrent
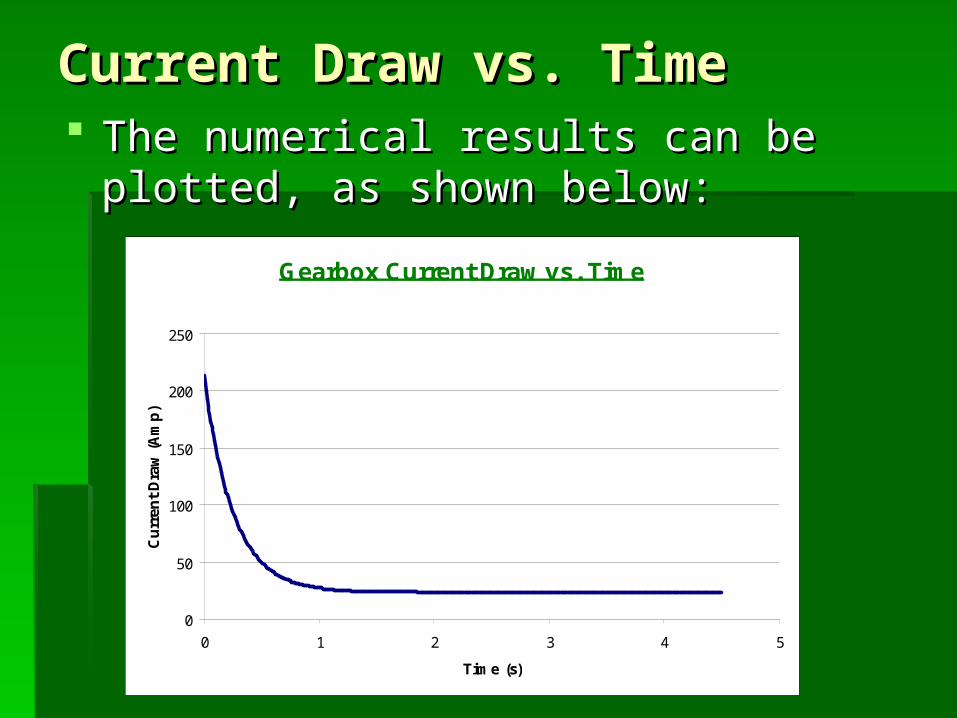
Current Draw vs. TimeCurrent Draw vs. Time The numerical results can be plotted, as The numerical results can be plotted, as
shown below:shown below:
Gearbox Current Draw vs. Time
0
50
100
150
200
250
0 1 2 3 4 5
Time (s)
Cu
rren
t D
raw
(A
mp
)
What does this provide?What does this provide?
Based on these plots, one can see how Based on these plots, one can see how the drivetrain will perform.the drivetrain will perform. Does Does current drawcurrent draw drop below “danger” drop below “danger”
levels in a short time?levels in a short time?
How long does it take robot to How long does it take robot to accelerate accelerate to top speed?to top speed?
Are things okay? NO?!?Are things okay? NO?!?
How can performance be increased?How can performance be increased? Increase Drivetrain PowerIncrease Drivetrain Power
Use Stronger MotorsUse Stronger Motors Use Multiple MotorsUse Multiple Motors
Increase Gear Ratio (Reduce top speed)Increase Gear Ratio (Reduce top speed) Is this acceptable?Is this acceptable?
Adding Power – Multiple Adding Power – Multiple MotorsMotors
Combining Motors Together – Not Voodoo!Combining Motors Together – Not Voodoo! 2 Motors combine to become 1 “super-motor”2 Motors combine to become 1 “super-motor” Match motors at free speed.Match motors at free speed. Sum all characteristicsSum all characteristics
Motor Load is distributed proportional to a ratio of free Motor Load is distributed proportional to a ratio of free speed.speed.
2 of the same motor is easy!2 of the same motor is easy! 4 Chiaphua Motors4 Chiaphua Motors
Multiple Speed Multiple Speed DrivetrainsDrivetrains
Allows for one “pushing” gear, and one Allows for one “pushing” gear, and one “cruising” gear.“cruising” gear.
Shift on the fly allows for accelerating Shift on the fly allows for accelerating through multiple gears to achieve high through multiple gears to achieve high speeds.speeds.
Shifting optimizes motor power for Shifting optimizes motor power for application at hand.application at hand.
The big picture…The big picture…
These calculations are used to design a These calculations are used to design a competition drivetrain.competition drivetrain.
Rather than do them by hand, most Rather than do them by hand, most designers use some kind of tool.designers use some kind of tool. Excel SpreadsheetExcel Spreadsheet Matlab ScriptMatlab Script Etc…Etc…
And then…And then…
This is a starting pointThis is a starting point Iterate to optimize resultsIterate to optimize results TestTest
Use your imaginationUse your imagination Infinite speedsInfinite speeds Multiple motorsMultiple motors Many gearsMany gears This isn’t the “end all” method.This isn’t the “end all” method.
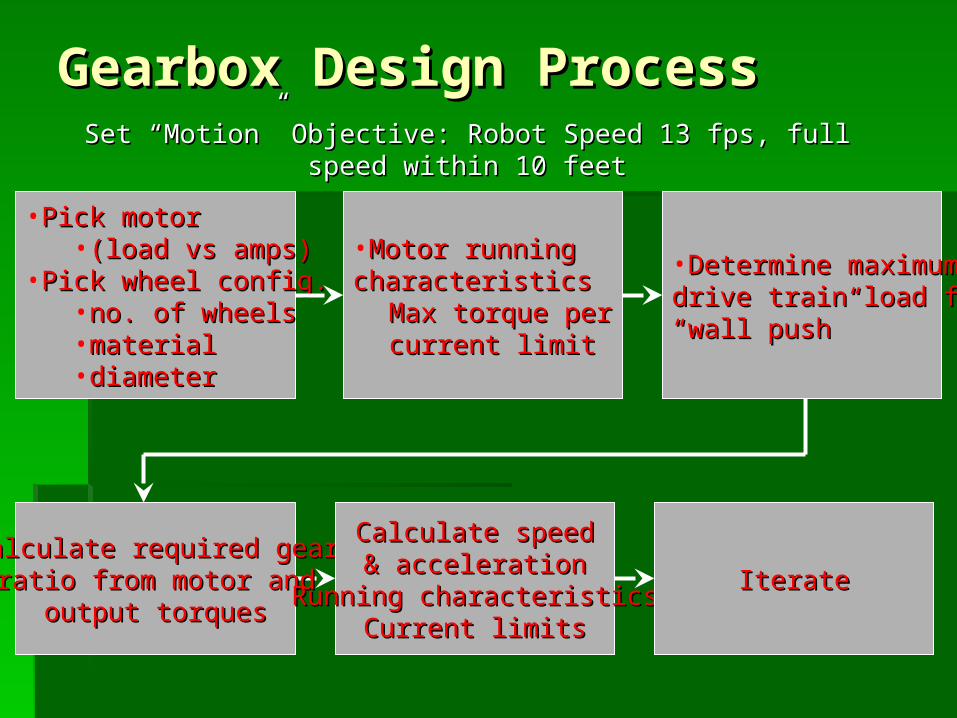
•Determine maximumDetermine maximumdrive train load fromdrive train load from““wall push”wall push”
•Motor running Motor running characteristicscharacteristics
Max torque per Max torque per current limitcurrent limit
Gearbox Design ProcessGearbox Design Process
•Pick motor Pick motor •(load vs amps)(load vs amps)
•Pick wheel config.Pick wheel config.•no. of wheelsno. of wheels•materialmaterial•diameterdiameter
Calculate required gearCalculate required gearratio from motor andratio from motor and
output torquesoutput torques
Calculate speedCalculate speed& acceleration& acceleration
Running characteristicsRunning characteristicsCurrent limitsCurrent limits
IterateIterate
Set “Motion” Objective: Robot Speed 13 fps, full speed within 10 feetSet “Motion” Objective: Robot Speed 13 fps, full speed within 10 feet
DemonstrationDemonstration
Here is an example of how to use a Here is an example of how to use a spreadsheet to do drivetrain design.spreadsheet to do drivetrain design. www.team229.orgwww.team229.org Everything is available (or soon will be) in Everything is available (or soon will be) in
resources section of 229 web siteresources section of 229 web site
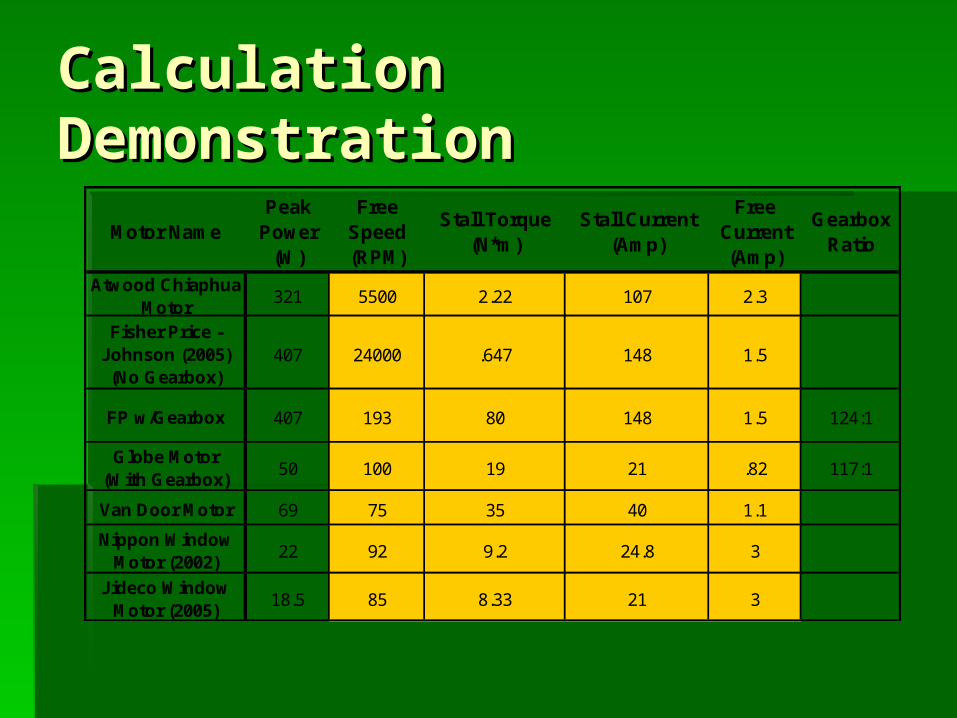
Calculation Calculation DemonstrationDemonstration
Motor NamePeak
Power (W)
Free Speed (RPM)
Stall Torque (N*m)
Stall Current (Amp)
Free Current (Amp)
Gearbox Ratio
Atwood Chiaphua Motor
321 5500 2.22 107 2.3
Fisher Price - Johnson (2005) (No Gearbox)
407 24000 .647 148 1.5
FP w/Gearbox 407 193 80 148 1.5 124:1
Globe Motor (With Gearbox)
50 100 19 21 .82 117:1
Van Door Motor 69 75 35 40 1.1
Nippon Window Motor (2002)
22 92 9.2 24.8 3
Jideco Window Motor (2005)
18.5 85 8.33 21 3