a solo-based automated quality control algorithm for ... · a solo-based automated quality control...
TRANSCRIPT

A Solo-Based Automated Quality Control Algorithm for Airborne TailDoppler Radar Data
MICHAEL M. BELL
University of Hawai’i at M~anoa, Honolulu, Hawaii
WEN-CHAU LEE, CORY A. WOLFF, AND HUAQING CAI
National Center for Atmospheric Research,* Boulder, Colorado
(Manuscript received 15 October 2012, in final form 5 April 2013)
ABSTRACT
An automated quality control preprocessing algorithm for removing nonweather radar echoes in airborne
Doppler radar data has been developed. This algorithm can significantly reduce the time and experience level
required for interactive radar data editing prior to dual-Doppler wind synthesis or data assimilation. The
algorithm uses the editing functions in the Solo software package developed by the National Center for
Atmospheric Research to remove noise, Earth-surface, sidelobe, second-trip, and other artifacts. The char-
acteristics of these nonweather radar returns, the algorithm to identify and remove them, and the impacts of
applying different threshold levels on wind retrievals are presented. Verification was performed by com-
parison with published Electra Doppler Radar (ELDORA) datasets that were interactively edited by dif-
ferent experienced radar meteorologists. Four cases consisting primarily of convective echoes from the
Verification of the Origins of Rotation in Tornadoes Experiment (VORTEX), Bow Echo and Mesoscale
Convective Vortex Experiment (BAMEX), Hurricane Rainband and Intensity Change Experiment
(RAINEX), and The Observing SystemResearch and Predictability Experiment (THORPEX) Pacific Asian
Regional Campaign (T-PARC)/Tropical Cyclone Structure-2008 (TCS08) field experiments were used to test
the algorithm using three threshold levels for data removal. The algorithm removes 80%, 90%, or 95% of the
nonweather returns and retains 95%, 90%, or 85% of the weather returns on average at the low-, medium-,
and high-threshold levels. Increasing the threshold level removes more nonweather echoes at the expense of
also removing more weather echoes. The low threshold is recommended when weather retention is the
highest priority, and the high threshold is recommendedwhen nonweather removal is the highest priority. The
medium threshold is a good compromise between these two priorities and is recommended for general use.
Dual-Doppler wind retrievals using the automatically edited data compare well to retrievals from in-
teractively edited data.
1. Introduction
Airborne Doppler radars are currently some of the
best tools for deducing mesoscale three-dimensional
wind and precipitation structures within weather systems
at long range from an operations center. They have been
the primary tools for deducing the internal structure of
mesoscale weather phenomena such as bow echoes,
convective boundary layers, fronts, hurricanes, meso-
scale convective systems, tornadoes, and winter storms
[Lee et al. (2003) and references therein]. Raw airborne
Doppler data contain both weather and nonweather
echoes that require editing and quality control (QC) prior
to wind synthesis, but interactive QC has been a hin-
drance for researchers because of the time and training
required to properly identify nonweather radar echoes.
To date, this interactive editing process has not been
systematically documented. The purpose of the current
study is to (i) document the characteristics of nonweather
echoes in airborne Doppler radar, (ii) design an algo-
rithm to preprocess airborne Doppler QC automatically
to reduce both the time and necessary experience level
*The National Center for Atmospheric Research is sponsored
by the National Science Foundation.
Corresponding author address: Michael M. Bell, Dept. of Me-
teorology, University of Hawai’i at M~anoa, 2525 Correa Rd.,
Honolulu, HI 96822.
E-mail: [email protected]
NOVEMBER 2013 BELL ET AL . 2509
DOI: 10.1175/JAMC-D-12-0283.1
� 2013 American Meteorological Society

for data users, and (iii) validate the algorithm and exam-
ine its impact on derived products such as dual-Doppler
synthesis and radar data assimilation.
The Electra Doppler Radar (ELDORA)/Analyese
Stereoscopic par Impulsions Aeroporte (ASTRAIA)
system (Hildebrand et al. 1996), operated by theNational
Center for Atmospheric Research (NCAR), has the best
spatial resolution of any currently operating airborne
Doppler precipitation radar. ELDORA has two sepa-
rate antennas that can scan rapidly at ;24 revolutions
per minute, with a complete revolution of each radar
available every 3 s. The two antennas are oriented ;168fore and aft of the cross-fuselage axis (i.e., aircraft
heading) so that the radar beams overlap in space as
the aircraft moves forward. The ELDORA scanning
strategy allows for dual-Doppler retrievals of the three-
dimensional wind with 300–500-m spatial resolution,
providing a tremendous advantage that can only be
realized after this prodigious amount of data is quality
controlled.
The QC process consists of airborne navigation and
pointing angle corrections (Testud et al. 1995; Bosart
et al. 2002), followed by interactive data editing. The
interactive QC process of airborne Doppler radar data
using the NCAR Solo software requires a significant
amount of time even for experienced radar meteorolo-
gists, with rough estimates of up to 30min to edit a single
radar scan. As a result, interactive editing of 10min
worth of ELDORA radar data takes up to 240 h by this
estimate.With the algorithmdescribed herein, the editing
time for the 10min of ELDORA data can be decreased
significantly, from several weeks down to a few days or
hours, depending on the intended use of the radar data.
A variety of algorithms to identify and remove non-
weather radar echoes have been developed for ground-
based radars (Steiner and Smith 2002; Lakshmanan et al.
2007), but many of the components from ground-based
QC are not directly applicable to airborne radar data
(Bousquet and Smull 2003). For example, the surface
echo characteristics are quite different with airborne
Doppler radars than with ground-based radars. Airborne
tail radars scan in an axis approximately perpendicular
to the aircraft track, such that the radar scans trace out a
helix in space.A ‘‘cluttermap’’ can bemade for a ground-
based radar that indicates where stationary targets such
as trees, terrain, or man-made structures are present, but
a static clutter map is not possible for a moving platform.
Bousquet and Smull (2003) alternatively used a digital
terrain map to identify echoes from Earth’s surface in
their semiautomated QC algorithm for airborne radar
data. However, QC algorithms based on spatial patterns
and numerical characteristics of the radar data may be
generally applicable. Bousquet and Smull (2003) also
used a running-mean outlier detection algorithm based
on Bargen and Brown (1980), similar to that used in
ground-based applications, with further QC performed
interactively.
Gamache (2005) developed an algorithm for the au-
tomatic QC of data collected in hurricanes by the Na-
tional Oceanic and Atmospheric Association (NOAA)
Tail Doppler Radar (TDR). The algorithm uses rule-
based procedures similar to the algorithm presented
herein, but the procedures and technical implementa-
tion are different. The Gamache (2005) algorithm was
developed for the specific context of hurricane re-
connaissance, with a primary focus of providing real-
time dual-Doppler winds for the National Hurricane
Center and National Centers for Environmental Pre-
diction. Hurricane-specific features, such as the appro-
ximate circular symmetry of the wind field and fixed
operational flight patterns, can be exploited to improve
the QC process. Because ELDORA is a research radar
operated within the context of National Science Foun-
dation (NSF)-funded field experiments, both the ob-
served phenomena and the data collection strategy
change from project to project, requiring a more gen-
eral algorithm. One of the recorded data fields from
ELDORA that is an important part of the current QC
algorithm is the normalized coherent power (NCP), but
this field is not currently computed by theNOAATDRor
used in the Gamache (2005) algorithm.
Velocity aliasing can be of concern for the NOAA
TDRwhen using a single pulse repetition frequency with
a relatively small Nyquist velocity (often 12.9m s21).
Although the technical implementation is different, both
NOAA TDR and ELDORA have the ability to use a
dual-pulse repetition frequency scheme to extend the
Nyquist velocity to 60–80ms21 and essentially eliminate
aliasing (Hildebrand et al. 1996; Jorgensen et al. 2000).
The algorithm presented here does not include dealiasing
as explicitly as in Gamache (2005), but can be included if
required (Bargen and Brown 1980).
The algorithm development was guided by two main
design goals: (i) to be general enough to handle a wide
variety of situations but specific enough to significantly
reduce QC time and (ii) to be implemented within the
context of the Solo interactive data editor. The first
design goal makes the algorithm generally applicable,
but sacrifices advantages that could be obtained from
tuning for a specific weather regime. The current al-
gorithm was therefore designed within the context of
convective weather given the preponderance of con-
vective cases in the ELDORA data archive. The trade-
off is practical, but limits its applicability to a subset of
the ELDORA archive andmay be suboptimal for some
weather regimes.
2510 JOURNAL OF APPL IED METEOROLOGY AND CL IMATOLOGY VOLUME 52

The second design goal was to develop the QC pre-
processing algorithm using the Solo interactive data
editor (Oye et al. 1995). In contrast to a stand-alone,
operationalQC application like that inGamache (2005),
a Solo script–based procedure can be easily distributed
to existing Solo users without requiring any additional
software. The batch-editing scripts can also be used by
researchers as a starting point for further interactive
editing within the Solo environment. The trade-off with
the second design goal is that algorithm components
were limited to those available as existing Solo editing
operations. A set of tunable parameters was developed
with Solo components to meet different editing criteria
using ‘‘low,’’ ‘‘medium,’’ and ‘‘high’’ thresholds for data
removal. It will be shown that increasing the threshold
level removes more nonweather echoes at the expense of
removing more weather echoes also. Although good re-
sults are obtained with the current algorithm, one result
of this study is that rule-based procedures with tunable
parameters such as those available within Solo may ulti-
mately be suboptimal for weather discrimination. The
current work helps pave the way for a more complex al-
gorithm with multidimensional classification metrics.
All radar QC algorithms suffer from a lack of an
established ‘‘ground truth’’ for validation. Nonweather
echo characteristics are highly variable, and it is difficult
to design a synthetic verification dataset that captures this
variability for different radars and weather conditions.
Determining whether a given radar volume consists of a
weather or nonweather echo ultimately depends on a
radar meteorologist’s subjective appraisal of the scene
and experience level. Although some volumes are easily
classifiable, others are more ambiguous and may be
classified differently by different researchers. The ap-
proach taken in this study was to validate the QC algo-
rithm using datasets edited by different researchers from
multiple field projects. The selected datasets are taken
from published papers by experienced ELDORA users,
and provide a reasonable baseline for validation and
statistical verification of the algorithm using dichotomous
classification metrics (Stanski et al. 1989; Woodcock
1976). The verification approach contains some potential
biases, but it is expected that differences between data-
sets and researchers’ editing styles would remove any
large systematic biases in the verification statistics.
The desired product from a quality controlled airborne
Doppler dataset is typically a wind retrieval or improved
initial conditions for a numerical simulation. Although
there are many studies that address dual-Doppler and
radar data assimilation techniques, considerably less at-
tention has been paid to the impacts of radarQCon these
techniques. The impacts of the different thresholds of data
removal on a dual-Doppler retrieval from a developing
tropical cyclone were examined, confirming the results of
a previous study that wind retrievals using the QC algo-
rithm were robust compared to their interactively edited
counterparts (Schmitz 2010). Impacts of the QC algo-
rithm on radar data assimilation (Zhang et al. 2012) will
also be summarized here. These results suggest that the
algorithm proves useful for preparing airborne radar
data for assimilation into numerical weather prediction
models, for real-time dual-Doppler during a research
flight to aid a mission scientist in making decisions
about where to next send the aircraft (Houze et al.
2006), or for initial QC prior to further interactive ed-
iting of detailed case studies in postanalysis mode.
The outline of this paper is as follows. Descriptions of
the nonweather echoes in airborne radar data and clas-
sification procedures are presented in section 2. The
validation and statistical verification of the QC algorithm
are presented in section 3. Impacts on dual-Doppler
retrievals and radar data assimilation are presented in
section 4. A summary and concluding remarks are pre-
sented in section 5. Technical details of the Solo software
and the automated QC algorithm are described in the
appendixes for interested readers.
2. Classification of echoes in airborne tail Dopplerradar data
a. Characteristics of nonweather echoes
A returned radar signal is quantified by the zero, first,
and second radar moments that correspond to the
reflectivity (hereinafter the units dBZ are used to in-
dicate reflectivity), Doppler velocity, and spectral width
(SW), respectively. The dBZ is directly proportional to
the returned power and the strength of the Doppler
velocity signal. The Doppler velocity is a statistical es-
timate frommultiple pulses that can be affected by noise
in the received signal and radar electronics. The SW
indicates the variance of the Doppler velocity within the
radar pulse volume because of noise, turbulence, wind
shear, differential fall speed, and antenna motion. A less
commonly used radar parameter is the normalized co-
herent power (NCP), which is defined by the ratio of the
power in the first moment (also called coherent power) to
the total returned power. NCP quantifies the relative
power used to calculate the Doppler velocity with the
total power used to calculate dBZ, and is approximately
inversely proportional to SW.
An unedited ELDORA radar sweep from The Ob-
serving System Research and Predictability Experi-
ment (THORPEX) Pacific Asian Regional Campaign
(T-PARC)/Tropical Cyclone Structure-2008 (TCS08)
field campaign that illustrates these radar parameters is
shown in Fig. 1. The radar image is from the aft-pointing
NOVEMBER 2013 BELL ET AL . 2511

antenna at 2351:31 UTC on 14 September 2008. The
Naval Research Laboratory’s P-3 aircraft position is at
the center of each panel, and a large convective echo and
anvil are evident to the right of the aircraft. The four
panels in Fig. 1 show dBZ, Doppler velocity, SW, and
NCP. Five main types of data can be identified in Fig. 1:
weather, noise, surface, radar sidelobes, and second-trip
echoes. Gray shading indicates values off the color scale,
and the locations of the nonweather echoes have been
highlighted. Noise regions are characterized by low dBZ
with a logarithmic range dependence, and random
Doppler velocities. The SW and NCP fields distinguish
predominately signal and noise regions with a rela-
tively sharp demarcation.
The tail Doppler scanning strategy yields a prominent
surface echo with a high dBZ, near-zeroDoppler velocity
over land (or the corresponding ocean surface velocity),
and a low SW. The surface echo is a thin, multigate echo
directly beneath the aircraft, but it expands in width at
longer ranges and becomes difficult to distinguish from
the strong convective echoes at low altitude to the right
of the aircraft. For ELDORA, there is also some cross
contamination from the multiple frequencies used in the
complex ‘‘chip’’ pulse (Hildebrand et al. 1996). The close
proximity of these frequencies results in a broadening of
the surface echo in range comparable with that of the
single-frequency NOAA TDR.1 Reflected atmospheric
echoes appear beneath the ground.
FIG. 1. Example of radar echoes from predepression Hagupit at 2351:30 UTC 14 Sep 2008
during T-PARC/TCS08. Shown is the (a) dBZ (increment 5 4 dBZ), (b) Doppler velocity
(increment 5 2m s21), (c) SW (increment 5 1.5m s21), and (d) NCP (increment 5 0.05).
Nonweather echoes are labeled in (a).
1Multiple-frequency contamination can be considered a ‘‘range
sidelobe’’ similar to contamination by sidelobe energy found off
the main beam axis. The range sidelobe can sometimes also be
found on the edge of strong weather echoes.
2512 JOURNAL OF APPL IED METEOROLOGY AND CL IMATOLOGY VOLUME 52
Although partial beamfilling by surface echo would
occur even with a ‘‘perfect’’ Gaussian radar beam, we
define ‘‘sidelobe echoes’’ as those resulting from distinct
peaks in the power in the tail of the radar beam by an-
tenna diffraction. The sidelobe surface reflection mani-
fests itself as a ring of moderate dBZ and low velocity
around the aircraft, with flared echoes near the base of
the ring that appear to emanate from the surface. The
diameter of the sidelobe surface ring is dependent on the
altitude of the aircraft, with larger rings as the aircraft flies
higher. The strongest sidelobe echoes are located near
the surface at approximately 208–308 from nadir, and are
characterized by a high NCP, moderate dBZ, and mod-
erate SW. Reflectivity decreases in the ‘‘flared’’ portion
of the echo farther from the surface, but the velocity
signal is nearly constant throughout the echo. Sidelobe
echoes occur primarily in clear-air regions, but the
boundary between the sidelobe echo and the weather
echo is often very subtle.
A ‘‘second trip’’ echo is a radar echo from a previous
pulse that returns from longer range and is combined
with the processing of the current pulse at shorter range.
The second-trip echo is evident as a large reflectivity
wedge on the left side of Fig. 1a, and is due to a combi-
nation of returns from both the surface (below flight
level) and convective weather (above the flight level) at
long range. On the right side of the aircraft, the stronger,
first-trip convective echo dominates the returned power
and no second-trip echo is evident. The second-trip
echo appears as a spike in the reflectivity field with a ran-
dom Doppler velocity, a moderate NCP, and a high SW.
Modern signal-processing techniques have been iden-
tified to separate multitrip echoes, such as phase coding
(Sachidananda and Zrnic 1999; Frush et al. 2002) that
may be implemented in future radar upgrades.
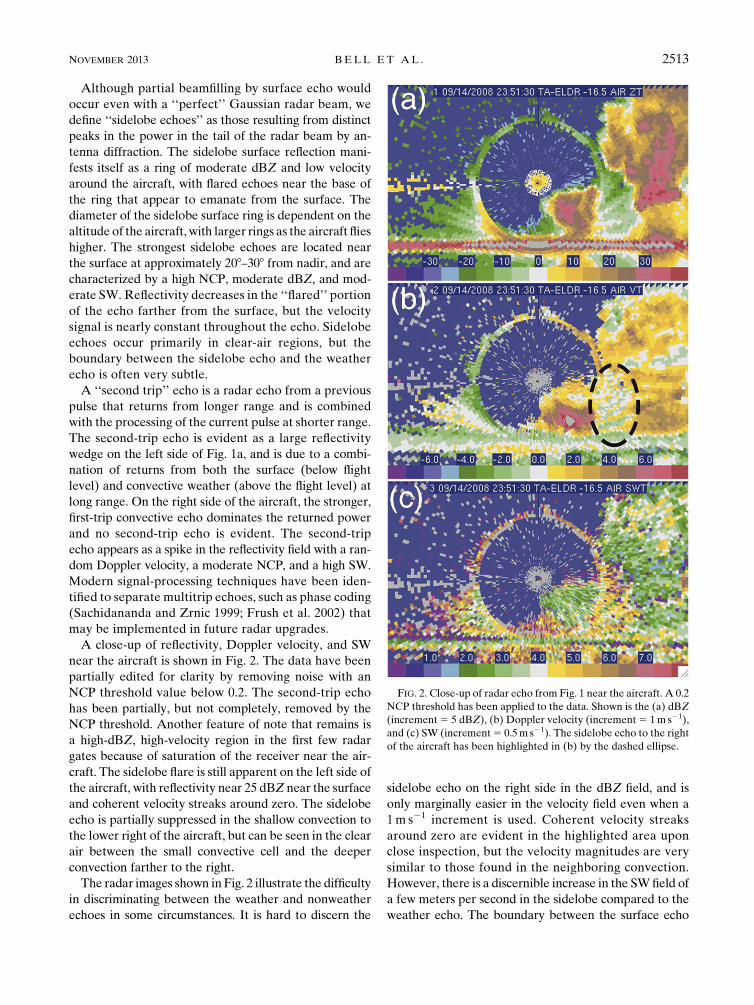
A close-up of reflectivity, Doppler velocity, and SW
near the aircraft is shown in Fig. 2. The data have been
partially edited for clarity by removing noise with an
NCP threshold value below 0.2. The second-trip echo
has been partially, but not completely, removed by the
NCP threshold. Another feature of note that remains is
a high-dBZ, high-velocity region in the first few radar
gates because of saturation of the receiver near the air-
craft. The sidelobe flare is still apparent on the left side of
the aircraft, with reflectivity near 25 dBZ near the surface
and coherent velocity streaks around zero. The sidelobe
echo is partially suppressed in the shallow convection to
the lower right of the aircraft, but can be seen in the clear
air between the small convective cell and the deeper
convection farther to the right.
The radar images shown in Fig. 2 illustrate the difficulty
in discriminating between the weather and nonweather
echoes in some circumstances. It is hard to discern the
sidelobe echo on the right side in the dBZ field, and is
only marginally easier in the velocity field even when a
1m s21 increment is used. Coherent velocity streaks
around zero are evident in the highlighted area upon
close inspection, but the velocity magnitudes are very
similar to those found in the neighboring convection.
However, there is a discernible increase in the SWfield of
a few meters per second in the sidelobe compared to the
weather echo. The boundary between the surface echo
FIG. 2. Close-up of radar echo from Fig. 1 near the aircraft. A 0.2
NCP threshold has been applied to the data. Shown is the (a) dBZ
(increment5 5 dBZ), (b) Doppler velocity (increment5 1m s21),
and (c) SW (increment5 0.5m s21). The sidelobe echo to the right
of the aircraft has been highlighted in (b) by the dashed ellipse.
NOVEMBER 2013 BELL ET AL . 2513
and deep convection is also difficult to discern in this
example. The lack of any ground-truth validation com-
pounds the difficulty in definitively classifying these am-
biguous echoes.
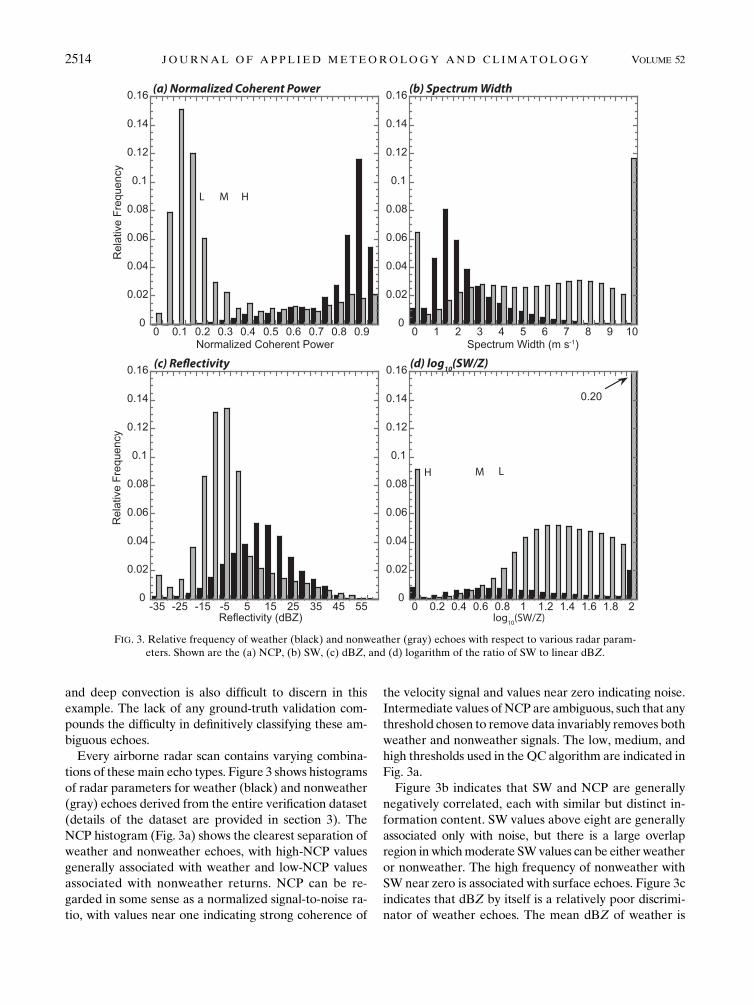
Every airborne radar scan contains varying combina-
tions of thesemain echo types. Figure 3 shows histograms
of radar parameters for weather (black) and nonweather
(gray) echoes derived from the entire verification dataset
(details of the dataset are provided in section 3). The
NCP histogram (Fig. 3a) shows the clearest separation of
weather and nonweather echoes, with high-NCP values
generally associated with weather and low-NCP values
associated with nonweather returns. NCP can be re-
garded in some sense as a normalized signal-to-noise ra-
tio, with values near one indicating strong coherence of
the velocity signal and values near zero indicating noise.
Intermediate values of NCP are ambiguous, such that any
threshold chosen to remove data invariably removes both
weather and nonweather signals. The low, medium, and
high thresholds used in the QC algorithm are indicated in
Fig. 3a.
Figure 3b indicates that SW and NCP are generally
negatively correlated, each with similar but distinct in-
formation content. SW values above eight are generally
associated only with noise, but there is a large overlap
region in whichmoderate SWvalues can be eitherweather
or nonweather. The high frequency of nonweather with
SW near zero is associated with surface echoes. Figure 3c
indicates that dBZ by itself is a relatively poor discrimi-
nator of weather echoes. The mean dBZ of weather is
FIG. 3. Relative frequency of weather (black) and nonweather (gray) echoes with respect to various radar param-
eters. Shown are the (a) NCP, (b) SW, (c) dBZ, and (d) logarithm of the ratio of SW to linear dBZ.
2514 JOURNAL OF APPL IED METEOROLOGY AND CL IMATOLOGY VOLUME 52

higher than that of nonweather, but there is considerable
overlap in the distributions. Although SW and dBZ are
not great discriminators by themselves, the combination
of these parameters contains more information (Fig. 3d).
In general, high SW associated with high dBZ would be
more indicative of turbulent convection or wind shear,
whereas high SW associated with low dBZ would be
more indicative of noise. The ratio of SW to reflectivity
in the QC algorithm is discussed further in the following
section.
b. Automatic quality control algorithm
There have been relatively few automated QC algo-
rithms developed for airborne weather radar, but one
area that has received a thorough treatment is the re-
moval of surface echo. For flat continental or oceanic
returns, the primary radar gates affected by the surface
can be identified by the intersection of the main lobe of
the radar beamwith the surface (Lee et al. 1994a; Testud
et al. 1995). The issue of surface removal in complex
terrain was addressed by Georgis et al. (2000) and
Bousquet and Smull (2003) through the use of a digital
terrain map. Complex terrain removal is not currently
part of the Solo software, highlighting one limitation of
the existing QC framework used in this study.2
The above studies focused on the removal of surface
echoes within the main lobe (defined by the half-power
beamwidth), but the strong backscatter from the surface
can contaminate a radar volume with only a small inter-
section of the ‘‘tail’’ of the beam and bias the Doppler
velocity toward zero. One advancement in the current
QC algorithm is the use of a variable ‘‘effective’’ beam-
width in the Testud et al. (1995) algorithm to remove data
with partial beamfilling by surface echo. The use of a
wider beamwidth removes partial surface echoes left
behind in the original form of the algorithm.
While the removal of all radar range gates, even those
potentially affected by the surface, may be desired for
some applications, excessive removal of near-surface
echoes can be detrimental for dual-Doppler synthesis.
Overestimating the amount of surface echo contami-
nation can significantly affect the magnitude and even
the sign of the retrieved vertical velocity because of the
strong dependence on the measured low-level diver-
gence. The variability of the partial surface echo depends
on the strength of the near-surface weather echo and
beam broadening with range, but without additional
signal processing of the Doppler velocity time series it
is impossible to quantitatively determine how much a
near-surface radar volume has been affected by the
surface.
A key advancement of the current study is the exten-
sion of automatic QC procedures beyond the removal of
surface echo. The basic editing procedure performed by
the automatic QC algorithm consists of nine steps, which
are shown in Table 1 and described in more detail in
appendix B for interested readers. Some of the relevant
details of the algorithm are summarized here.
The Solo scripts used to execute the algorithm steps
can be configured with user-defined threshold values
that offer a compromise between the amount of weather
and nonweather data removed. Three basic threshold
levels were defined as low, medium, and high, with the
corresponding script parameters shown in Table 2. The
use of a general, procedural approach necessitates
the use of broad characteristics for data removal rather
than specific feature identification. The three threshold
levels in the QC algorithm for NCP, SW, and dBZ are
indicated in Figs. 3a and 3d. Removing data with a low
NCP is very effective at eliminating noise, as evidenced
by the histogram.At the low threshold almost no weather
echo is removed, but increasing the threshold to remove
more undesirable nonweather echoes also consequently
removes more-desirable weather echoes.
The ratio of SW to dBZ was found to be a good iden-
tifier of sidelobe echoes, and Fig. 3d shows the logarithm
of the ratio of SW to dBZ converted to its linear value
(mm26m23) for dBZ values less than zero. A SW/dBZ
ratio near zero is ambiguous, but increasing values of the
ratio are associated with higher probabilities of non-
weather. It is noted that the high threshold uses a 5-dBZ
value, which increases the relative frequency of weather
slightly compared to Fig. 3d. While most ground-based
algorithms include SW and dBZ information, the SW/
dBZ parameter is a novel combination to the authors’
knowledge. The ratio is not explicitly calculated in Solo,
but a combination of SW and dBZ that mimics this pa-
rameter is included in the algorithm.
It is also noted that the order in which the Solo com-
ponents are executed plays an important role in the al-
gorithm, such that successively finer discriminations are
TABLE 1. Description of editing steps in the QC algorithm.
(i) Back up original reflectivity and velocity fields
(ii) Remove data with an NCP value below a specified threshold
(iii) Remove noisy data at edges of radar range
(iv) Remove the direct surface returns
(v) Remove data with high SW and low dBZ
(vi) Despeckle the data
(vii) Defreckle the data
(viii) Second despeckle pass
(ix) Synchronize the reflectivity and velocity fields
2 This functionality has been implemented in a stand-alone ver-
sion of the QC algorithm.
NOVEMBER 2013 BELL ET AL . 2515
made after coarser data removal. For example, the
‘‘despeckling’’ and ‘‘defreckling’’ algorithms described
in appendix B were found to be effective at removing
isolated data, noise, and second-trip echoes after the
bulk of nonweather echo was removed.
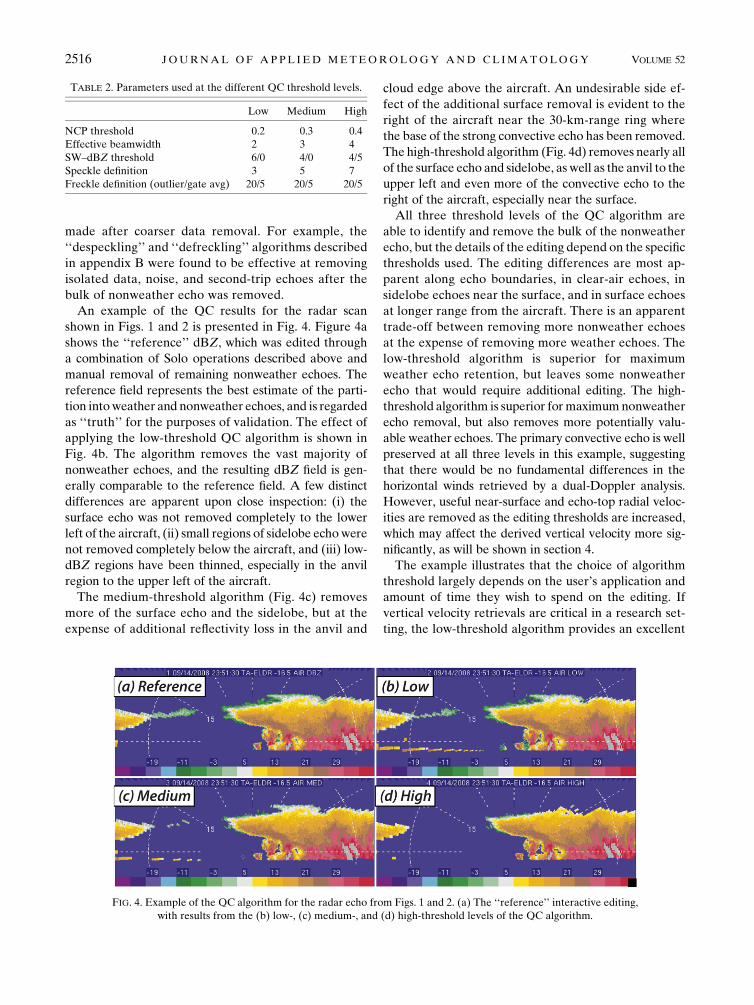
An example of the QC results for the radar scan
shown in Figs. 1 and 2 is presented in Fig. 4. Figure 4a
shows the ‘‘reference’’ dBZ, which was edited through
a combination of Solo operations described above and
manual removal of remaining nonweather echoes. The
reference field represents the best estimate of the parti-
tion intoweather and nonweather echoes, and is regarded
as ‘‘truth’’ for the purposes of validation. The effect of
applying the low-threshold QC algorithm is shown in
Fig. 4b. The algorithm removes the vast majority of
nonweather echoes, and the resulting dBZ field is gen-
erally comparable to the reference field. A few distinct
differences are apparent upon close inspection: (i) the
surface echo was not removed completely to the lower
left of the aircraft, (ii) small regions of sidelobe echowere
not removed completely below the aircraft, and (iii) low-
dBZ regions have been thinned, especially in the anvil
region to the upper left of the aircraft.
The medium-threshold algorithm (Fig. 4c) removes
more of the surface echo and the sidelobe, but at the
expense of additional reflectivity loss in the anvil and
cloud edge above the aircraft. An undesirable side ef-
fect of the additional surface removal is evident to the
right of the aircraft near the 30-km-range ring where
the base of the strong convective echo has been removed.
The high-threshold algorithm (Fig. 4d) removes nearly all
of the surface echo and sidelobe, aswell as the anvil to the
upper left and even more of the convective echo to the
right of the aircraft, especially near the surface.
All three threshold levels of the QC algorithm are
able to identify and remove the bulk of the nonweather
echo, but the details of the editing depend on the specific
thresholds used. The editing differences are most ap-
parent along echo boundaries, in clear-air echoes, in
sidelobe echoes near the surface, and in surface echoes
at longer range from the aircraft. There is an apparent
trade-off between removing more nonweather echoes
at the expense of removing more weather echoes. The
low-threshold algorithm is superior for maximum
weather echo retention, but leaves some nonweather
echo that would require additional editing. The high-
threshold algorithm is superior formaximumnonweather
echo removal, but also removes more potentially valu-
able weather echoes. The primary convective echo is well
preserved at all three levels in this example, suggesting
that there would be no fundamental differences in the
horizontal winds retrieved by a dual-Doppler analysis.
However, useful near-surface and echo-top radial veloc-
ities are removed as the editing thresholds are increased,
which may affect the derived vertical velocity more sig-
nificantly, as will be shown in section 4.
The example illustrates that the choice of algorithm
threshold largely depends on the user’s application and
amount of time they wish to spend on the editing. If
vertical velocity retrievals are critical in a research set-
ting, the low-threshold algorithm provides an excellent
TABLE 2. Parameters used at the different QC threshold levels.
Low Medium High
NCP threshold 0.2 0.3 0.4
Effective beamwidth 2 3 4
SW–dBZ threshold 6/0 4/0 4/5
Speckle definition 3 5 7
Freckle definition (outlier/gate avg) 20/5 20/5 20/5
FIG. 4. Example of the QC algorithm for the radar echo from Figs. 1 and 2. (a) The ‘‘reference’’ interactive editing,
with results from the (b) low-, (c) medium-, and (d) high-threshold levels of the QC algorithm.
2516 JOURNAL OF APPL IED METEOROLOGY AND CL IMATOLOGY VOLUME 52

starting point for subsequent interactive editing. For data
assimilation applications, the loss of some good weather
echoes may have a minimal impact compared to the in-
sertion of radar artifacts into the model, especially if the
data are subsequently ‘‘super obbed’’ after quality con-
trol (Zhang et al. 2012). The trade-offs presented for
the current example are generally applicable for most
ELDORA radar cases, but the details depend on the
meteorological situation and aircraft sampling strategy.
3. Algorithm verification
a. Verification statistics
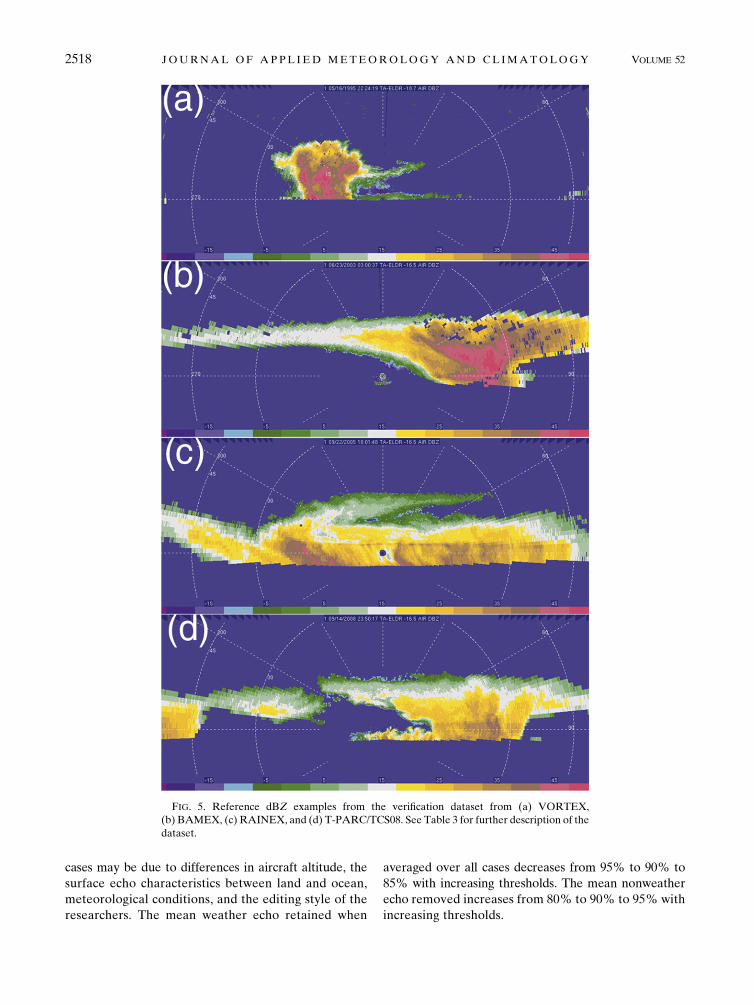
Verification of the QC algorithm was conducted using
multiple radar datasets. The test dataset was chosen from
four field programs in which ELDORA was involved
(Fig. 5). Each case represents a different mesoscale re-
gime so that theQC algorithm could be tested in a variety
of meteorological situations. The verification data are
1344 radar scans that were interactively edited by expe-
rienced radar meteorologists and used in case studies
published in the refereed literature. The sample dataset
contains 48min of data and over 60 million radar gates,
which provides a reasonable sample for calculating sta-
tistics. It is recognized that data editing is subjective and
editing styles among these experienced radar meteorol-
ogists may vary, which could produce a bias in the sta-
tistical results presented. However, averaging over the
variety of weather conditions and editing styles is ex-
pected to reduce the bias from any one case. Table 3
provides information about each of the cases used for the
verification including the times of each of the flight legs.
The field experiments are the Verification of the Origins
of Rotation in Tornadoes Experiment (VORTEX), Bow
Echo and Mesoscale Convective Vortex Experiment
(BAMEX), Hurricane Rainband and Intensity Change
Experiment (RAINEX), and T-PARC/TCS08. The
VORTEX (Wakimoto et al. 1998) and BAMEX
(Wakimoto et al. 2004) cases represent different types of
midlatitude continental convection. The RAINEX
(Houze et al. 2006) and T-PARC/TCS08 (Bell and
Montgomery 2009) cases represent tropical oceanic sys-
tems in different stages of development.
Measures of the skill of the QC algorithm can be de-
rived using 2 3 2 contingency tables where hits, misses,
and false positives can be collected for each case. The
edited data are treated as dichotomous values where each
gate in the sample is defined as either ‘‘positive’’ weather
or ‘‘negative’’ nonweather. A radar gate where both the
QC algorithm and verification dataset have identified a
weather echo is considered a correct positive result. A
gate where both have identified a nonweather echo is
considered a correct negative result. Correct positive and
negative results are considered hits. Radar gates falsely
identified as weather echoes by the QC algorithm are
considered false positives. Radar gates falsely identified
as nonweather echoes are considered misses.
A typical sweep of data from ELDORA contains
muchmore nonweather echo than weather (cf. Fig. 1a to
Fig. 4a). The algorithm skill scores would be dominated
by data that are obviously not weather without a base-
line edit of the raw data. To get meaningful statistics,
some very basic QC techniques were applied to the raw
data before the fields were run through the full QC al-
gorithm. Data with NCP below 0.2, radar echoes at and
below the surface identified with a 1.88 beamwidth, and
echoes above 25-km altitude were removed prior to the
verification. The baseline edited data allow for the
evaluation of the algorithm on data that are more diffi-
cult to classify as weather or nonweather.
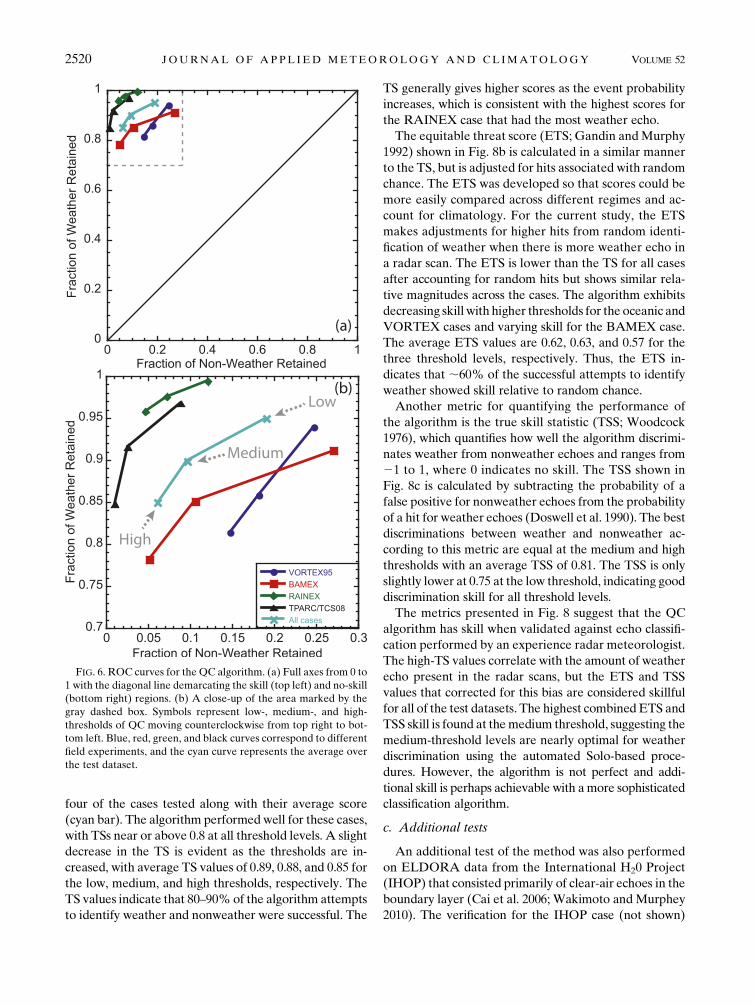
Figure 6 shows a receiver operating characteristic
(ROC; Joliffe and Stephenson 2003) plot that displays the
relationship between correctly identified events (hits)
versus falsely identified events (false positives) for the
low, medium, and high thresholds. Anything to the upper
left of the 1:1 line across the ROC plot in Fig. 6a is con-
sidered to have positive skill. A perfect algorithm with
retention of all weather data and the removal of all
nonweather data would give results in the top-left corner
of the chart. The three data points for each test case
represent the average amount of data retained after ap-
plication of the method using the three different thresh-
olds. The rightmost points on each curve denote the low
threshold and the leftmost points denote the high
threshold. Thresholds in the algorithm could be tuned by
the user to yield different levels of editing between the
high and low points illustrated here. The curves are near
the top-left corner for the current algorithm, but trace
counterclockwise as the QC thresholds are increased.
The two primary goals of the algorithm—to retain all
weather and remove all nonweather—cannot be met
simultaneously and involve trade-offs as the thresholds
are increased.
The ROC curve is the best for RAINEX (green line),
with over 95% of the weather retained and 88% of
nonweather removed at all thresholds on average. The
RAINEX case was located in the outer eyewall of Hur-
ricane Rita in 2005 and the data contain large regions of
stratiform and convective weather echoes. The other
tropical case from T-PARC/TCS08 (black line) per-
formed the second best, with almost all nonweather data
removed at the high threshold. The continental cases
from VORTEX (blue line) and BAMEX (red line) still
verify well, but with less skill than the oceanic cases. The
differences in skill between the oceanic and continental
NOVEMBER 2013 BELL ET AL . 2517
cases may be due to differences in aircraft altitude, the
surface echo characteristics between land and ocean,
meteorological conditions, and the editing style of the
researchers. The mean weather echo retained when
averaged over all cases decreases from 95% to 90% to
85% with increasing thresholds. The mean nonweather
echo removed increases from 80% to 90% to 95% with
increasing thresholds.
FIG. 5. Reference dBZ examples from the verification dataset from (a) VORTEX,
(b) BAMEX, (c) RAINEX, and (d) T-PARC/TCS08. See Table 3 for further description of the
dataset.
2518 JOURNAL OF APPL IED METEOROLOGY AND CL IMATOLOGY VOLUME 52

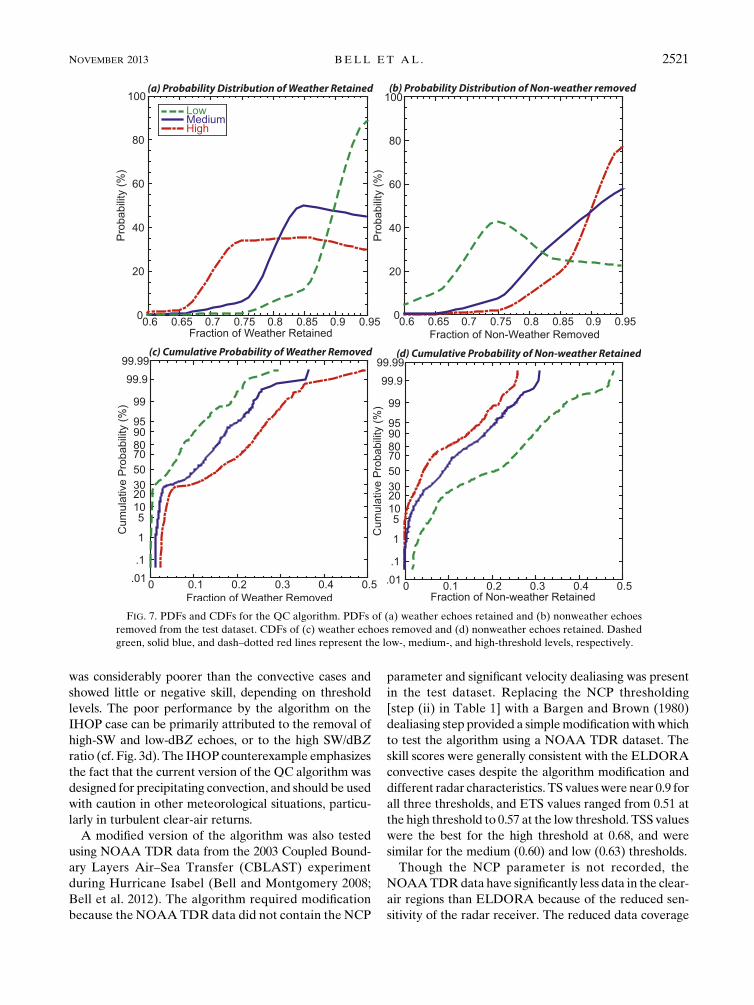
Statistical distributions illustrating the algorithm per-
formance over all the cases are shown in Fig. 7. The top
two panels in Fig. 7 show probability distribution func-
tions (PDFs) for each of the three threshold levels, and
the bottom two panels show cumulative probability
distributions (CDFs). Figure 7a shows the probability
that the algorithm met the first of its primary goals by
retaining weather echoes. There is considerable overlap
in the PDFs, but the distributions generally broaden for
weather retention and sharpen for nonweather removal
with increasing thresholds. The low-threshold PDF (green
line) has the narrowest distribution and peaks at 95%
weather retained. The medium-threshold PDF (blue
line) has a broader distribution and peaks closer to 85%
weather retained. The high-threshold PDF (red line) has
the broadest distribution with a nearly flat probability
peak between 75% and 85% weather retained.
Figure 7b shows the probability that the algorithm
met the second primary goal by removing nonweather
echoes. The PDFs are approximately the reverse of
those shown in Fig. 7a, with a sharpening of the PDFs as
the thresholds are increased. The peaks of the medium-
and high-threshold PDFs are both at 95% nonweather
removed, but the mean probability that weather is re-
moved at the medium threshold is lower due to the
broader distribution. The peak of the low-threshold PDF
is at 75% nonweather removed, but with a very broad
distribution. In general, increasing the thresholds in-
creases the probability that nonweather will be removed,
but also decreases the probability that weather will be
retained. Applying different thresholds mostly affects
the lower-quality data that reside in the gray area be-
tween weather and artifacts and has less impact on strong
weather signals.
Figures 7c and 7d show the cumulative probability
that the algorithm did notmeet its goals. The CDF of the
weather data that is removed is shown in Fig. 7c and the
CDF when nonweather data are retained is shown in
Fig. 7d. Like the PDFs, the distributions are approxi-
mately reversed with increasing thresholds. The CDFs
can be used to estimate the probability of error for the
QC algorithm for a given threshold, with Fig. 7c corre-
sponding to misses and Fig. 7d corresponding to false
positives. The low-threshold CDFs indicate that less
than ;12% of the weather echo would be removed at
the 95% confidence level, compared to;26% using the
high threshold. However, no more than 16% of the
nonweather would be retained using the high threshold,
compared to 30% when using the low threshold. At the
99% confidence level, the CDFs suggest that less than
20% of the weather echo would be removed by using the
low threshold, and nomore than 20%of the nonweather
would be retained when using the high threshold.
Figures 5–7 indicate a consistent depiction of the trade-
off between weather retention and nonweather removal.
It is clear that these two goals cannot be met simulta-
neously with the current dichotomous algorithm, but
the thresholds provide a reasonable way of prioritizing
one goal over the other. The choice of a particular
threshold then depends on the user’s specific application,
experience level, and time commitment to further ed-
iting. The statistics suggest that a user who wants to
retain the maximum amount of weather echo should
use the low threshold. For example, an experienced
user interested in dual-Doppler synthesis may start the
QC process with the low-threshold script, followed by
interactive editing to remove the remainder of the
nonweather data. The user can be confident that the vast
majority of weather echoes, including near-surface and
echo-top data, are left intact. Likewise, the statistics
suggest that a user who wants to remove the maximum
amount of nonweather echo should use the high thresh-
old. For example, radar data are typically thinned for data
assimilation into a numerical weather prediction model,
such that only the highest-quality data may be desired.
The statistics suggest that the medium threshold is a good
compromise that reduces editing time while still pro-
ducing a high-quality dataset.
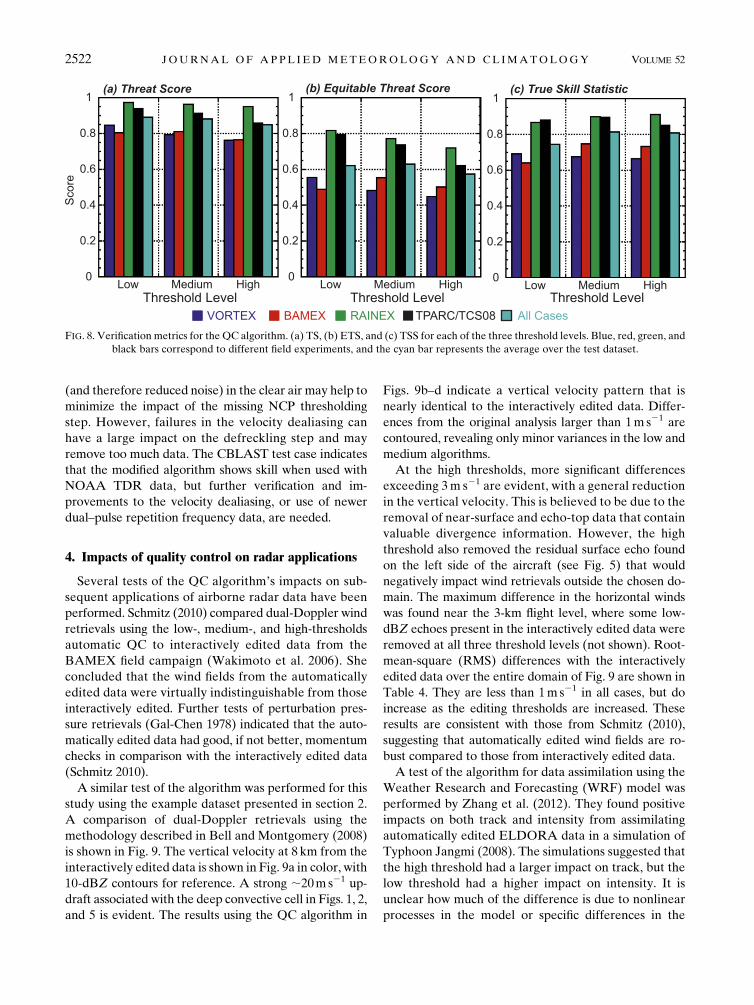
b. Skill metrics
A variety of metrics are available to assess the skill of a
dichotomous algorithm. The threat score (TS; Schaefer
1990) quantifies how well weather identification by the
algorithm corresponds to weather identification by the
experienced radar meteorologists. The TS ranges from
0 (no skill) to 1 (perfect algorithm) and is calculated by
dividing the number of hits by the total number of hits,
misses, and false positives. Figure 8a shows the TS for all
TABLE 3. Date, time, field experiment, and brief description of the cases in the verification dataset.
Date Time period (UTC) Field experiment Description
16 May 1995 2219:44–2225:59 VORTEX Tornadic supercell
23 Jun 2003 0251:00–0301:59 BAMEX Mesocyclone in mesoscale convective system
22 Sep 2005 1800:00–1821:59 RAINEX Mature hurricane eyewall
14 Sep 2008 2347:02–2355:59 T-PARC/TCS08 Tropical predepression convection
NOVEMBER 2013 BELL ET AL . 2519
four of the cases tested along with their average score
(cyan bar). The algorithm performed well for these cases,
with TSs near or above 0.8 at all threshold levels. A slight
decrease in the TS is evident as the thresholds are in-
creased, with average TS values of 0.89, 0.88, and 0.85 for
the low, medium, and high thresholds, respectively. The
TS values indicate that 80–90%of the algorithm attempts
to identify weather and nonweather were successful. The
TS generally gives higher scores as the event probability
increases, which is consistent with the highest scores for
the RAINEX case that had the most weather echo.
The equitable threat score (ETS; Gandin andMurphy
1992) shown in Fig. 8b is calculated in a similar manner
to the TS, but is adjusted for hits associated with random
chance. The ETS was developed so that scores could be
more easily compared across different regimes and ac-
count for climatology. For the current study, the ETS
makes adjustments for higher hits from random identi-
fication of weather when there is more weather echo in
a radar scan. The ETS is lower than the TS for all cases
after accounting for random hits but shows similar rela-
tive magnitudes across the cases. The algorithm exhibits
decreasing skill with higher thresholds for the oceanic and
VORTEX cases and varying skill for the BAMEX case.
The average ETS values are 0.62, 0.63, and 0.57 for the
three threshold levels, respectively. Thus, the ETS in-
dicates that ;60% of the successful attempts to identify
weather showed skill relative to random chance.
Another metric for quantifying the performance of
the algorithm is the true skill statistic (TSS; Woodcock
1976), which quantifies how well the algorithm discrimi-
nates weather from nonweather echoes and ranges from
21 to 1, where 0 indicates no skill. The TSS shown in
Fig. 8c is calculated by subtracting the probability of a
false positive for nonweather echoes from the probability
of a hit for weather echoes (Doswell et al. 1990). The best
discriminations between weather and nonweather ac-
cording to this metric are equal at the medium and high
thresholds with an average TSS of 0.81. The TSS is only
slightly lower at 0.75 at the low threshold, indicating good
discrimination skill for all threshold levels.
The metrics presented in Fig. 8 suggest that the QC
algorithm has skill when validated against echo classifi-
cation performed by an experience radar meteorologist.
The high-TS values correlate with the amount of weather
echo present in the radar scans, but the ETS and TSS
values that corrected for this bias are considered skillful
for all of the test datasets. The highest combinedETS and
TSS skill is found at themedium threshold, suggesting the
medium-threshold levels are nearly optimal for weather
discrimination using the automated Solo-based proce-
dures. However, the algorithm is not perfect and addi-
tional skill is perhaps achievable with amore sophisticated
classification algorithm.
c. Additional tests
An additional test of the method was also performed
on ELDORA data from the International H20 Project
(IHOP) that consisted primarily of clear-air echoes in the
boundary layer (Cai et al. 2006; Wakimoto and Murphey
2010). The verification for the IHOP case (not shown)
FIG. 6. ROC curves for the QC algorithm. (a) Full axes from 0 to
1 with the diagonal line demarcating the skill (top left) and no-skill
(bottom right) regions. (b) A close-up of the area marked by the
gray dashed box. Symbols represent low-, medium-, and high-
thresholds of QC moving counterclockwise from top right to bot-
tom left. Blue, red, green, and black curves correspond to different
field experiments, and the cyan curve represents the average over
the test dataset.
2520 JOURNAL OF APPL IED METEOROLOGY AND CL IMATOLOGY VOLUME 52
was considerably poorer than the convective cases and
showed little or negative skill, depending on threshold
levels. The poor performance by the algorithm on the
IHOP case can be primarily attributed to the removal of
high-SW and low-dBZ echoes, or to the high SW/dBZ
ratio (cf. Fig. 3d). The IHOP counterexample emphasizes
the fact that the current version of the QC algorithm was
designed for precipitating convection, and should be used
with caution in other meteorological situations, particu-
larly in turbulent clear-air returns.
A modified version of the algorithm was also tested
using NOAA TDR data from the 2003 Coupled Bound-
ary Layers Air–Sea Transfer (CBLAST) experiment
during Hurricane Isabel (Bell and Montgomery 2008;
Bell et al. 2012). The algorithm required modification
because the NOAATDR data did not contain the NCP
parameter and significant velocity dealiasing was present
in the test dataset. Replacing the NCP thresholding
[step (ii) in Table 1] with a Bargen and Brown (1980)
dealiasing step provided a simplemodificationwithwhich
to test the algorithm using a NOAA TDR dataset. The
skill scores were generally consistent with the ELDORA
convective cases despite the algorithm modification and
different radar characteristics. TS valueswere near 0.9 for
all three thresholds, and ETS values ranged from 0.51 at
the high threshold to 0.57 at the low threshold. TSS values
were the best for the high threshold at 0.68, and were
similar for the medium (0.60) and low (0.63) thresholds.
Though the NCP parameter is not recorded, the
NOAATDRdata have significantly less data in the clear-
air regions than ELDORA because of the reduced sen-
sitivity of the radar receiver. The reduced data coverage
FIG. 7. PDFs and CDFs for the QC algorithm. PDFs of (a) weather echoes retained and (b) nonweather echoes
removed from the test dataset. CDFs of (c) weather echoes removed and (d) nonweather echoes retained. Dashed
green, solid blue, and dash–dotted red lines represent the low-, medium-, and high-threshold levels, respectively.
NOVEMBER 2013 BELL ET AL . 2521
(and therefore reduced noise) in the clear air may help to
minimize the impact of the missing NCP thresholding
step. However, failures in the velocity dealiasing can
have a large impact on the defreckling step and may
remove too much data. The CBLAST test case indicates
that the modified algorithm shows skill when used with
NOAA TDR data, but further verification and im-
provements to the velocity dealiasing, or use of newer
dual–pulse repetition frequency data, are needed.
4. Impacts of quality control on radar applications
Several tests of the QC algorithm’s impacts on sub-
sequent applications of airborne radar data have been
performed. Schmitz (2010) compared dual-Doppler wind
retrievals using the low-, medium-, and high-thresholds
automatic QC to interactively edited data from the
BAMEX field campaign (Wakimoto et al. 2006). She
concluded that the wind fields from the automatically
edited data were virtually indistinguishable from those
interactively edited. Further tests of perturbation pres-
sure retrievals (Gal-Chen 1978) indicated that the auto-
matically edited data had good, if not better, momentum
checks in comparison with the interactively edited data
(Schmitz 2010).
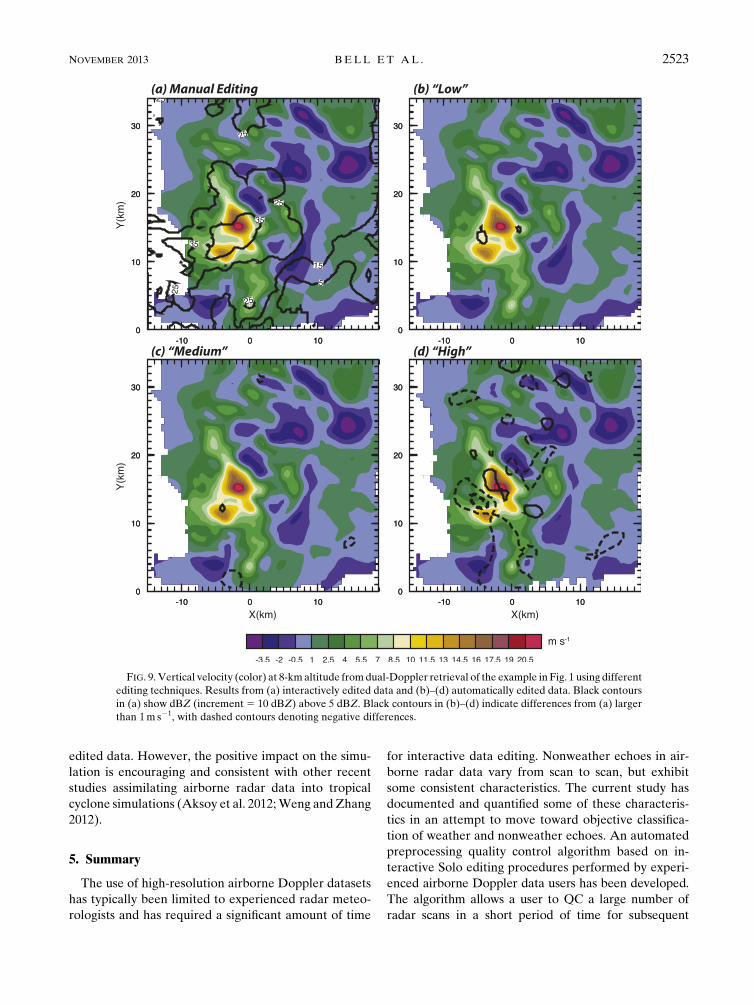
A similar test of the algorithm was performed for this
study using the example dataset presented in section 2.
A comparison of dual-Doppler retrievals using the
methodology described in Bell and Montgomery (2008)
is shown in Fig. 9. The vertical velocity at 8 km from the
interactively edited data is shown in Fig. 9a in color, with
10-dBZ contours for reference. A strong ;20ms21 up-
draft associated with the deep convective cell in Figs. 1, 2,
and 5 is evident. The results using the QC algorithm in
Figs. 9b–d indicate a vertical velocity pattern that is
nearly identical to the interactively edited data. Differ-
ences from the original analysis larger than 1ms21 are
contoured, revealing only minor variances in the low and
medium algorithms.
At the high thresholds, more significant differences
exceeding 3m s21 are evident, with a general reduction
in the vertical velocity. This is believed to be due to the
removal of near-surface and echo-top data that contain
valuable divergence information. However, the high
threshold also removed the residual surface echo found
on the left side of the aircraft (see Fig. 5) that would
negatively impact wind retrievals outside the chosen do-
main. The maximum difference in the horizontal winds
was found near the 3-km flight level, where some low-
dBZ echoes present in the interactively edited data were
removed at all three threshold levels (not shown). Root-
mean-square (RMS) differences with the interactively
edited data over the entire domain of Fig. 9 are shown in
Table 4. They are less than 1ms21 in all cases, but do
increase as the editing thresholds are increased. These
results are consistent with those from Schmitz (2010),
suggesting that automatically edited wind fields are ro-
bust compared to those from interactively edited data.
A test of the algorithm for data assimilation using the
Weather Research and Forecasting (WRF) model was
performed by Zhang et al. (2012). They found positive
impacts on both track and intensity from assimilating
automatically edited ELDORA data in a simulation of
Typhoon Jangmi (2008). The simulations suggested that
the high threshold had a larger impact on track, but the
low threshold had a higher impact on intensity. It is
unclear how much of the difference is due to nonlinear
processes in the model or specific differences in the
FIG. 8. Verification metrics for the QC algorithm. (a) TS, (b) ETS, and (c) TSS for each of the three threshold levels. Blue, red, green, and
black bars correspond to different field experiments, and the cyan bar represents the average over the test dataset.
2522 JOURNAL OF APPL IED METEOROLOGY AND CL IMATOLOGY VOLUME 52
edited data. However, the positive impact on the simu-
lation is encouraging and consistent with other recent
studies assimilating airborne radar data into tropical
cyclone simulations (Aksoy et al. 2012;Weng andZhang
2012).
5. Summary
The use of high-resolution airborne Doppler datasets
has typically been limited to experienced radar meteo-
rologists and has required a significant amount of time
for interactive data editing. Nonweather echoes in air-
borne radar data vary from scan to scan, but exhibit
some consistent characteristics. The current study has
documented and quantified some of these characteris-
tics in an attempt to move toward objective classifica-
tion of weather and nonweather echoes. An automated
preprocessing quality control algorithm based on in-
teractive Solo editing procedures performed by experi-
enced airborne Doppler data users has been developed.
The algorithm allows a user to QC a large number of
radar scans in a short period of time for subsequent
FIG. 9. Vertical velocity (color) at 8-kmaltitude fromdual-Doppler retrieval of the example in Fig. 1 using different
editing techniques. Results from (a) interactively edited data and (b)–(d) automatically edited data. Black contours
in (a) show dBZ (increment5 10 dBZ) above 5 dBZ. Black contours in (b)–(d) indicate differences from (a) larger
than 1m s21, with dashed contours denoting negative differences.
NOVEMBER 2013 BELL ET AL . 2523

dual-Doppler wind synthesis or data assimilation. An
estimated 10-fold time savings can be achieved by using
the proposed preprocessingQCalgorithm comparedwith
the traditional interactive editing approach using Solo.
The algorithm consists of nine steps based on the au-
thors’ experience with editing data from convective
weather cases. Nonweather echoes resulting from noise,
radar sidelobes, surface, and second-trip returns were
characterized and subject to a series of Solo radar-editing
operations.Removing datawith a lownormalized coherent
power (NCP) was found to be the most effective method
for removing noise. The Solo despeckling and defreckling
algorithms were found to be effective at removing isolated
data, noise, and second-trip echoes. A conditional thresh-
old of high-spectrum width and low reflectivity was found
to be the best for removing radar sidelobes and preserving
turbulent motions in the convective core, but was detri-
mental to turbulent clear-air boundary layer returns.
The algorithm can be tuned using a combination of
thresholds in different parameters for data removal
depending on the user’s application and priorities. The
current study uses three different combinations, termed
low, medium, and high thresholds, to illustrate and eval-
uate the effectiveness of the proposed algorithm in re-
moving nonweather radar returns. The different threshold
levels essentially tune the algorithm to classify echoes that
are ambiguous and not clearly weather or nonweather.
Increasing the threshold level removes more nonweather
echoes at the expense of removing more weather echoes
also. The low threshold is recommended when weather
echo retention is the highest priority, as it removes about
80% of the nonweather echoes on average, and no more
than;20% of the weather echoes at the 99% confidence
level in the verification dataset. The high threshold is
recommended when nonweather echo removal is the
highest priority, as it removes about 95% of nonweather
echoes on average, and no more than ;30% of the
weather echoes at the 99%confidence level. Themedium
threshold is a good compromise between these two pri-
orities, and is recommended for general use.
Verification of the algorithm was performed using
convective weather cases from the ELDORA radar
interactively edited by different radar meteorologists
from the VORTEX, BAMEX, RAINEX, and T-PARC/
TCS08 field experiments. The threat scores (TSs) were
between 0.8 and 0.9 on average, suggesting that the al-
gorithm has skill in identifying the weather echoes cor-
responding to those identified as weather by a radar
meteorologist. Lower scores, near 0.6 for the equitable
threat score (ETS), suggest that the algorithm still has
skill after adjusting for hits associated with random
chance. The true skill statistic (TSS), which determines
how well the method can discriminate between weather
and nonweather echoes, was between 0.6 and 0.8 on av-
erage. The TS decreased slightly with higher thresholds,
while the TSS increased slightly with higher thresholds.
The medium threshold had the highest combined ETS
and TSS for the verification dataset, suggesting a near-
optimal combination of threshold parameters. The met-
rics suggest that the algorithm performs similarly for the
different test cases in general, and that it is applicable for
a wide variety of convective datasets. An additional test
with NOAA TDR data from CBLAST indicates that a
modified version of the algorithm shows skill for NOAA
TDR convective cases as well as ELDORA data. How-
ever, the algorithm performed poorly on the IHOP
dataset and is not recommended for preprocessing pri-
marily clear-air boundary layer echoes.
The effect of applying different threshold levels is
most apparent along echo boundaries, in clear-air ech-
oes, in sidelobe echoes near the surface, and in surface
echoes at longer range from the aircraft. Large convec-
tive or stratiform echoes are largely unaffected at any of
the threshold levels, except near the surface and echo
top. Application of the automatically edited data in
a dual-Doppler synthesis to retrieve the horizontal winds
within convective echoes was robust after applying the
method and not strongly sensitive to the choice of
thresholds. The minimal impact on dual-Doppler wind
retrieval is consistent with previous studies that showed
positive impacts of automatically edited data on both
dual-Doppler analyses (Schmitz 2010) and numerical
simulations using radar data assimilation (Zhang et al.
2012). However, accurate Doppler velocities near the
surface and echo top are critical for retrieving an accurate
vertical velocity. Root-mean-square differences between
wind retrievals from interactively and automatically
edited data were small, but pointwise values differed by
up to a few meters per second. It is highly recommended
to inspect and manually edit the data after applying the
QC algorithm for research quality wind synthesis.
Though the majority of the radar echo can be classi-
fied using a rule-based approach, the real challenge for
radar QC lies in the more ambiguous echoes. One of the
primary deficiencies of the current method is the use of
TABLE 4. RMS values of dual-Doppler winds in the zonal (u),
meridional (y), and vertical (w) directions from interactively edited
data and the RMS difference when using automatic editing (ms21).
RMS value
RMS difference
Low Medium High
u 4.80 0.34 0.52 0.92
y 3.94 0.31 0.45 0.72
w 3.12 0.27 0.44 0.90
2524 JOURNAL OF APPL IED METEOROLOGY AND CL IMATOLOGY VOLUME 52

hard thresholds for each of the discriminating parame-
ters. A more sophisticated algorithm must take into ac-
count the ‘‘fuzzy’’ nature of the radar echoes in different
scanning strategies and meteorological situations. For
example, it is evident that the probability of weather
generally increases as the NCP increases, but use of this
single parameter does not contain enough information
to define an optimal threshold for all situations. The
classification must ultimately be multidimensional and
requires more complex logic that is not possible within
the Solo framework. Furthermore, the classification is
currently subjective and could be improved with better
objective characterization of nonweather echoes using
synthetic datasets. The medium threshold represents
a near-optimal set of thresholds for meeting both re-
quirements of removing nonweather and retaining
weather echoes identified by a radar meteorologist using
Solo. However, further refinement appears to be possible
outside the confines of the Solo software. Continued de-
velopment of the method to incorporate multidimen-
sional fuzzy logic in a stand-alone software package is
currently under way.
Acknowledgments. This research was funded by the
National Science Foundation through the American Re-
covery and Reinvestment Act. The first author was also
partially supported by NSF Award AGS-0851077 and the
Office of Naval Research Award N001408WR20129. The
authors also thank Cathy Kessinger and Andy Penny for
their comments on the manuscript.
APPENDIX A
Solo Interactive Radar Editor
Solo was originally developed at NCAR in 1993 for
perusing and editing Doppler radar data (Oye et al.
1995), and was extensively revised in version 2 (also re-
ferred to as SoloII) in 2003. The title of the software is not
an acronymbut rather stems from the initial development
location in the Solomon Islands as part of the Tropical
Ocean Global Atmosphere (TOGA) Coupled Ocean–
Atmosphere Response Experiment (COARE) field
program. The native data format for Solo is Doppler
Radar Data Exchange (DORADE; Lee et al. 1994b)
developed for ELDORA, with individual DORADE
files colloquially known as ‘‘sweep files.’’ ELDORA
data editing is typically done by the principal investigator
for a field project as part of their postexperiment research
with assistance fromNCAR,where editing procedures can
be tuned based on the specific project requirements. Solo
has been the primary editing software formanyELDORA
and NOAA tail Doppler radar users over the years.
The Solo data viewer can display up to 12 color panels
of different radar field variables with range rings or
Cartesian distance overlays. The numerical values of in-
dividual radar gates can be inspected using the ‘‘Data’’
widget. A more detailed inspection of the data can be
performed using the ‘‘Examine’’ widget, which can dis-
play numerical values of multiple data fields in a specified
area, the metadata associated with the radar data header,
or the history of radar edits in the file. The Examine
widget can also be used for point-and-click deletion or
velocity unfolding of individual radar gates or rays.
Both interactive and bulk radar data editing can be
performed using the ‘‘Editor’’ widget. In an interactive
setting, the user can draw a boundary around an arbi-
trarily defined patch of radar echo and apply a series of
operators to that patch on a scan-by-scan basis. In a batch
mode, editing operations can be applied tomultiple radar
scans at one time. Many editing operations are available
for ground-based and airborne platforms, ranging from
simple deletion to more complex series of logical opera-
tions. Solo also contains several diagnostic operators in-
cluding histogram, rain-rate, and radial shear calculations.
The primary operators used for the QC algorithm pre-
sented in this study are the ‘‘remove surface,’’ ‘‘thresh-
old,’’ ‘‘despeckle,’’ and ‘‘defreckle’’ operators. Ground
removal operations use the aircraft altitude, aircraft
attitude parameters, radar beamwidth, and the radar-
pointing angles to identify potential surface returns. At
the present time, Solo cannot handle complex terrain.
Threshold operations remove data in one field based on
the numerical values exceeding a specified parameter
in another field. Data removal can be performed above,
below, or between the specified threshold values. The
despeckle operator removes clusters of radar gates along
a ray that are smaller than a specified ‘‘speckle’’ defini-
tion, defined by default as three gates. Therefore,
despeckling removes isolated radar gates that are not
part of a larger weather echo. Isolated gates with large
numerical values that are embedded within a weather
echo can be identified by comparison with the average
value of nearby radar gates. An outlier algorithm to
identify these gates is implemented in the radial di-
rection as the defreckle algorithm, and in a circular patch
as a ‘‘deglitch’’ algorithm. Experiments for the current
study with the deglitch operator tended to remove more
data compared than the defreckle operator.
Other Solo editing operators include velocity deal-
iasing using the Bargen and Brown (1980) algorithm and
mathematical functions (i.e., add, subtract, multiply, and
exponentiate). Solo can also be used to correct radar
metadata such as aircraft inertial navigation system errors
(Testud et al. 1995; Bosart et al. 2002). Earth-relative
Doppler velocities and radar gate locations can then be
NOVEMBER 2013 BELL ET AL . 2525

recalculated using the corrected platform location and
motion.
One deficiency of the SoloII software is that it depends
on an older, deprecated 32-bit graphics library, and the
code is not easily accessible for modification to add or
improve the available editing steps. A stand-alone ver-
sion of the batch-editing functionality of the software has
been developed by the authors. The stand-alone version
has an easily modified Ruby script interface, but it cur-
rently lacks the full functionality of Solo as a data viewer
and interactive editor. Efforts to upgrade to version 3 of
Solo, including full 64-bit support, are currently under
way at NCAR. The Solo software package, editing
scripts described here, and stand-alone editing soft-
ware are available for interested users.
APPENDIX B
Automated Quality Control Procedures
This appendix presents in detail the steps that are
listed in Table 1, with steps viii and ix combined in the
last section.
a. Backup original reflectivity and velocity fields
The current version 2 of Solo does not have an ‘‘undo’’
functionality. As a result, it is important for any editing
step using this software to store the results of unedited or
stepwise-edited procedures that could result in unwanted
loss of data. This step alsomakes it easy to apply different
levels of thresholding within the same file under different
data field names.
b. Remove noisy data with low NCP
The NCP parameter is a normalized value between
zero and one representing a spectrum from pure noise to
strong signal in the Doppler velocity estimate as de-
scribed in section 2. The three thresholds selected for the
automatic algorithm range from 0.2 to 0.4, above which
the removal of quality weather data becomes unaccept-
able for most applications. While the NCP threshold is
relatively simple, it removes the most data of any step in
the algorithm. Noisy gates that remain after this step are
typically isolated and are further addressed in section f of
appendix B. The NCP parameter is not currently com-
puted in NOAA TDR data, and therefore this step is not
applicable for NOAA TDR datasets.
c. Remove noisy data near the edges of radar range
The data from the first few gates near the aircraft of-
ten have strong dBZ and noisy Doppler velocities due to
saturation of the receiver, as is evident in Fig. 2. Similarly,
data in the last few gates at the edge of the radar range are
often unusable due to signal-processing requirements
(e.g., test pulse). While the amount of noise is dependent
on the meteorological conditions and the unambiguous
range of the radar, the limited number of gates retained
by a careful examination of these regions is usually not
worth the effort. Approximately five gates at the begin-
ning and end of each radar beam are therefore removed
in this algorithm step, which can be adjusted as needed.
d. Remove the direct surface returns
Testud et al. (1995) derived a formula to identify the
radar gates contaminated by the surface echo based
on the half-power beamwidth of the radar antenna. An
increase in the ‘‘effective’’ width of the radar beam is
sufficient to identify and remove gates with partial
beamfilling in the surface identification algorithm. The
low threshold uses an effective beamwidth parameter of
28 that is slightly above the native resolution of ELDORA
and NOAA TDR (1.88). Higher effective beamwidths of
38 and 48 at the medium and high thresholds remove
substantiallymore surface echo, especially away from the
nadir rotation angle. At longer ranges, the high threshold
may remove too much near-surface echo and should be
used with caution when quality vertical velocity estimates
are important.
e. Remove data with high SW and low dBZ
The ratio of the SW and dBZ fields is analogous to
the NCP parameter, with the variance of the Doppler
signal used instead of the power in the velocity signal.
In this step, volumes with SW greater than 6m s21 and
dBZ less than zero are removed at the low-threshold
level. The SW threshold is decreased to 4m s21 at the
medium level, and the dBZ threshold is increased to 5
at the high level.
For radars that do not record NCP, this step can serve
as a proxy for the step described in section b of ap-
pendix B. The caveat with the SW–dBZ threshold is that
regions of turbulence or wind shear with small scatterers
will be adversely affected. The thresholds were chosen to
remove sidelobe echoes and minimize the chance of
convective turbulence being removed by the algorithm.
However, tests indicate that this step can remove signif-
icant echo from the clear-air boundary layer and should
be used with caution when preservation of boundary
layer echoes is important.
f. Despeckle the data
The spatial scales of the weather observed by airborne
Doppler radars are typically much larger than individual
radar range gates. After the previous five steps have been
performed, the majority of the nonweather echoes have
been removed and the remaining isolated gates with few
2526 JOURNAL OF APPL IED METEOROLOGY AND CL IMATOLOGY VOLUME 52
neighbors are unlikely to represent significant meteoro-
logical features. An efficient algorithm for identifying
speckles, or isolated gates along the radar beam, is part of
the Solo editor with a variable definition for the speckle
size. The low threshold uses the default speckle definition
of three gates, effectively removing features with spatial
scales less than 450m (for a 150-m-range gate). The me-
dium and high thresholds increase the definition to five
and seven gates, or 750 and 1050m, respectively.
Unfortunately, the corresponding algorithm for iden-
tifying isolated gates in the azimuthal direction is not part
of the Solo package. Thus, a larger speckle definition has
the potential to remove features that are relatively thin
in the radial direction but have significant horizontal ex-
tent. The most common examples of this are the anvil
region of a thunderstorm or shallow, near-surface struc-
tures such as boundary layer clouds or insect returns.
Careful consideration of the features of interest is impor-
tant for determining the speckle definition.
g. Defreckle the data
Complementary to radar speckles are radar freckles.
Freckles are radar gates that are outliers relative to their
neighbors within a larger weather echo. A freckle can be
defined as a gate with a value that deviates significantly
from a spatial mean in the neighborhood of the gate.
Though the freckles can be defined using any radar pa-
rameter, only the Doppler velocity is used in the current
algorithm. Because this step is primarily for outlier de-
tection, the freckle definitions are identical for the three
threshold levels with a five-gate running mean and a
20m s21 outlier criterion.
In general, the defreckling algorithm is effective at
removing spikes in the velocity field within weather
echoes while retaining realistic velocity gradients. The
defreckle algorithm is also effective at removing second-
trip echoes that havemoderate dBZ but randomDoppler
velocities. A potential failure mode of the defreckle
algorithm occurs when the mean becomes ill-defined
relative to the outliers. This appears to occur most of-
ten where a second-trip echo occurs radially inward of
a weather echo. The running mean is then defined by
noisy data and the entire beam can be removed. The
algorithm can also fail where there is a strong velocity
gradient across a region ofmissing data such as that found
between hurricane rainbands, or where the velocity has
aliasing errors.
h. Second despeckling and synchronization ofreflectivity and velocity
A final pass with the despeckling algorithm removes
any gates that were isolated by the defreckling algorithm,
and the synchronization ensures that identical gates are
removed from both the dBZ and velocity fields. The
synchronization is not ideal, because the reflectivity may
be representative of weather even when the velocity is
noisy. Unfortunately, the algorithm cannot distinguish
this situation because the primary criteria are based on
velocity metrics.
REFERENCES
Aksoy, A., S. Lorsolo, T. Vukicevic, K. J. Sellwood, S. D. Aberson,
and F. Zhang, 2012: The HWRF Hurricane Ensemble Data
Assimilation System (HEDAS) for high-resolution data: The
impact of airborne Doppler radar observations in an OSSE.
Mon. Wea. Rev., 140, 1843–1862.Bargen, D. W., and R. C. Brown, 1980: Interactive radar velocity
unfolding. Preprints, 19th Conf. on RadarMeteorology,Miami
Beach, FL, Amer. Meteor. Soc., 278–285.
Bell, M. M., and M. T. Montgomery, 2008: Observed structure,
evolution, and potential intensity of category 5 Hurricane
Isabel (2003) from 12 to 14 September.Mon.Wea. Rev., 136,
2023–2045.
——, and——, 2009: Airborne radar observations of pre-depression
Hagupit during TPARC/TCS-08. Preprints, 34th Conf. on
Radar Meteorology, Williamsburg, VA, Amer. Meteor. Soc.,
12A.5. [Available online at https://ams.confex.com/ams/
34Radar/techprogram/paper_156070.htm.]
——, ——, and K. E. Emanuel, 2012: Air–sea enthalpy and mo-
mentum exchange at major hurricane wind speeds observed
during CBLAST. J. Atmos. Sci., 69, 3197–3222.
Bosart, B. L.,W.-C. Lee, andR.M.Wakimoto, 2002: Procedures to
improve the accuracy of airborneDoppler radar data. J. Atmos.
Oceanic Technol., 19, 322–339.
Bousquet, O., and B. F. Smull, 2003: Airflow and precipitation
fields within deep alpine valleys observed by airborneDoppler
radar. J. Appl. Meteor., 42, 1497–1513.
Cai, H., W.-C. Lee, T. M. Weckwerth, C. Flamant, and H. V.
Murphey, 2006: Observations of the 11 June dryline during
IHOP_2002—A null case for convection initiation. Mon.
Wea. Rev., 134, 336–354.
Doswell, C. A., III, R. Davies-Jones, and D. L. Keller, 1990:
On summary measures of skill in rare event forecasting based
on contingency tables. Wea. Forecasting, 5, 576–585.
Frush, C., R. J. Doviak, M. Sachidananda, and D. S. Zrnic, 2002:
Application of the SZ phase code to mitigate range–velocity
ambiguities in weather radars. J. Atmos. Oceanic Technol., 19,
413–430.
Gal-Chen, T., 1978: A method for the initialization of the anelastic
equations: Implications for matching models with observa-
tions. Mon. Wea. Rev., 106, 587–606.
Gamache, J. F., 2005: Real-time dissemination of hurricane wind
fields determined from airborne Doppler radar data. Joint
Hurricane Testbed Final Rep., U.S. Weather Research Pro-
gram, 12 pp. [Available online at http://www.nhc.noaa.gov/jht/
2003-2005reports/DOPLRgamache_JHTfinalreport.pdf.]
Gandin, L., and A. H. Murphy, 1992: Equitable skill scores for
categorical forecasts. Mon. Wea. Rev., 120, 361–370.
Georgis, J. F., F. Roux, and P. H. Hildebrand, 2000: Observation of
precipitating systems over complex orography with meteoro-
logical Doppler radars: A feasibility study. Meteor. Atmos.
Phys., 72, 185–202.
NOVEMBER 2013 BELL ET AL . 2527

Hildebrand, P. H., and Coauthors, 1996: The ELDORA/ASTRAIA
airborne Doppler weather radar: High-resolution observa-
tions from TOGA COARE. Bull. Amer. Meteor. Soc., 77,
213–232.
Houze, R. A., Jr., and Coauthors, 2006: The Hurricane Rainband
and Intensity Change Experiment: Observations and modeling
of Hurricane Katrina, Ophelia, and Rita. Bull. Amer. Meteor.
Soc., 87, 1503–1521.Joliffe, I. T., and D. B. Stephenson, 2003: Forecast Verification:
A Practitioner’s Guide in Atmospheric Science. John Wiley
and Sons, 254 pp.
Jorgensen, D. P., T. R. Shepherd, and A. S. Goldstein, 2000:
A dual-pulse repetition frequency scheme for mitigating
velocity ambiguities of theNOAAP-3 airborneDoppler radar.
J. Atmos. Oceanic Technol., 17, 585–594.
Lakshmanan, V., A. Fritz, T. Smith, K. Hondl, and G. J. Stumpf,
2007: An automated technique to quality control radar re-
flectivity data. J. Appl. Meteor., 46, 288–305.
Lee, W.-C., P. Dodge, F. D. Marks, and P. H. Hildebrand, 1994a:
Mapping of airborne Doppler radar data. J. Atmos. Oceanic
Technol., 11, 572–578.
——, C. Walther, and R. Oye, 1994b: Doppler Radar Data Ex-
change format DORADE. National Center for Atmospheric
Research Tech. Rep., 18 pp.
——, F. D. Marks, and C. Walther, 2003: Airborne Doppler Radar
Data Analysis Workshop. Bull. Amer. Meteor. Soc., 84, 1063–
1075.
Oye, R., C. Mueller, and S. Smith, 1995: Software for radar trans-
lation, visualization, editing, and interpolation. Preprints, 27th
Conf. on Radar Meteorology, Vail, CO, Amer. Meteor. Soc.,
359–361.
Sachidananda, M., and D. Zrnic, 1999: Systematic phase codes for
resolving range overlaid signals in a Doppler weather radar.
J. Atmos. Oceanic Technol., 16, 1351–1363.
Schaefer, J. T., 1990: The critical success index as an indicator of
warning skill. Wea. Forecasting, 5, 570–575.
Schmitz, A., 2010: An investigation to address the robustness of
aircraft radar data. M.S. thesis, Dept. of Meteorology, St. Louis
University, 188 pp.
Stanski, H. R., L. J. Wilson, and W. R. Burrows, 1989: Survey of
common verification methods in meteorology. World Meteo-
rological Organization World Weather Watch Tech. Rep. 8,
114 pp.
Steiner, M., and J. A. Smith, 2002: Use of three-dimensional
reflectivity structure for automated detection and removal
of nonprecipitating echoes in radar data. J. Atmos. Oceanic
Technol., 19, 673–686.
Testud, J., P. H. Hildebrand, and W.-C. Lee, 1995: A procedure to
correct airborne Doppler radar data for navigation errors using
the echo returned from the earth’s surface. J. Atmos. Oceanic
Technol., 12, 800–820.Wakimoto, R. M., and H. V. Murphey, 2010: Frontal and radar
refractivity analyses of the dryline on 11 June 2002 during
IHOP. Mon. Wea. Rev., 138, 228–241.
——, C. Liu, and H. Cai, 1998: The Garden City, Kansas, storm
during VORTEX 95. Part I: Overview of the storm’s life cycle
and mesocyclogenesis. Mon. Wea. Rev., 126, 372–392.
——, H. Cai, and H. V. Murphey, 2004: The Superior, Nebraska,
supercell during BAMEX.Bull. Amer. Meteor. Soc., 85, 1095–1106.
——,H. V.Murphey, A. Nester, D. P. Jorgensen, and N. T. Atkins,
2006: High winds generated by bow echoes. Part I: Overview
of the Omaha bow echo 5 July 2003 storm during BAMEX.
Mon. Wea. Rev., 134, 2793–2812.
Weng, Y., and F. Zhang, 2012: Assimilating airborne Doppler radar
observations with an ensemble Kalman filter for convection-
permitting hurricane initialization and prediction: Katrina
(2005). Mon. Wea. Rev., 140, 841–859.
Woodcock, F., 1976: The evaluation of yes/no forecasts for scientific
and administrative purposes. Mon. Wea. Rev., 104, 1209–1214.Zhang, L., Z. Pu, W.-C. Lee, and Q. Zhao, 2012: The influence of
airborne Doppler radar data quality on numerical simulations
of a tropical cyclone. Wea. Forecasting, 27, 231–239.
2528 JOURNAL OF APPL IED METEOROLOGY AND CL IMATOLOGY VOLUME 52