a fast tabu search algorithm for the group shop scheduling problem
TRANSCRIPT
A fast tabu search algorithm for the group shop scheduling problem
S.Q. Liu, H.L. Ong*, K.M. Ng
Department of Industrial and Systems Engineering, National University of Singapore, 10 Kent Ridge Crescent, Singapore 119260, Singapore
Received 3 June 2004; received in revised form 19 November 2004; accepted 2 February 2005
Available online 16 March 2005
Abstract
Three types of shop scheduling problems, the flow shop, the job shop and the open shop scheduling problems, have been widely studied in
the literature. However, very few articles address the group shop scheduling problem introduced in 1997, which is a general formulation that
covers the three above mentioned shop scheduling problems and the mixed shop scheduling problem. In this paper, we apply tabu search to
the group shop scheduling problem and evaluate the performance of the algorithm on a set of benchmark problems. The computational results
show that our tabu search algorithm is typically more efficient and faster than the other methods proposed in the literature. Furthermore, the
proposed tabu search method has found some new best solutions of the benchmark instances.
q 2005 Elsevier Ltd. All rights reserved.
Keywords: Machine scheduling; Flow shop; Open shop; Job shop; Mixed shop; Group shop
1. Introduction
The machine scheduling problems can be classified into
two types according to the characteristics of the relationship
between the jobs and operations: the single-stage production
systems and the multi-stage production systems. In a single-
stage production system, each job consists of only one
operation, whereas in multi-stage production systems, each
job generally consists of more than one operation, each of
which requiring a different machine to process at a time.
There are three main types of multi-stage production
systems, namely the flow shop scheduling (FSS) problem,
the job shop scheduling (JSS) problem, and the open shop
scheduling (OSS) problem. In a flow shop, the operations of
each job have to be processed on machines in the same
order. In a job shop, which is a generalization of the flow
shop, the operations of each job have to be processed in a
given order on the machines, but different jobs may have
different orders. In an open shop, the processing order of the
operations for each job is unrestricted. These three shop
scheduling problems have been studied for a long time since
the 1950s. They are known to be NP-hard and hence difficult
0965-9978/$ - see front matter q 2005 Elsevier Ltd. All rights reserved.
doi:10.1016/j.advengsoft.2005.02.002
* Corresponding author. Tel.: C65 6874 2562; fax: C65 6777 1434.
E-mail address: [email protected] (H.L. Ong).
to solve optimally [1,2]. The difficulty of the problem may
be illustrated by the fact that the optimal solution of a
10-machine 10-job JSS instance, formulated by Fisher and
Thompson in 1963 [3], was not found until more than
20 years after the problem was introduced. In fact, this
instance was exactly solved for the first time in 1989 by
Carlier and Pinson with a branch and bound algorithm
which requires 5 h of computing time on PRIME 2655 [4].
Furthermore, although several methods were proposed to
deal with the permutation FSS problem, a special case of the
general FSS problem, very few papers address the general
FSS problem [5]. Most research activities aimed at tackling
the OSS problem have long been dominated by exact
approaches, such as branch and bound methods. The first
state-of-the-art metaheuristic for the OSS problem was
developed by Liaw in 1999 [6].
In 1985, the term mixed shop scheduling (MSS) problem
for describing a more general type of a multi-stage
production system was introduced by Masuda et al. [7]. In
MSS, the machine routes of jobs can either be fixed or
unrestricted. The MSS problem can also be regarded as a
mixture of the above three shop scheduling problems. In
1997, the group shop scheduling (GSS) problem was first
introduced in the context of a mathematical competition
organized by the TU Eindhoven, Netherlands [8].
Similar to the MSS problem, the GSS problem contains
the characteristics of the FSS, JSS, and OSS problems. As a
result, the methodology for solving the MSS problem can
Advances in Engineering Software 36 (2005) 533–539
www.elsevier.com/locate/advengsoft
0 1 2
3 4 5 6
7 8 9
Fig. 1. The graph for one GSS instance.
S.Q. Liu et al. / Advances in Engineering Software 36 (2005) 533–539534
also be applied to the GSS problem with some modification.
To our knowledge, very few articles in the literature address
the application of metaheuristics to the MSS and GSS
problems [9,10].
Actually, one may consider the class of shop scheduling
problems discussed above as arising from two possible
sources. One is the static shop scheduling problems, such as
jobs to be processed in a production department where
machine requirement and task order are assumed to be
known. Consequently, it is reasonable to assume that the
problem falls into a specified category of shop scheduling
problems discussed above. The other possible source
consists of jobs that are dynamic in nature. For instance,
the jobs to be processed in a maintenance workshop may
arrive dynamically. In this situation, the job characteristics
and requirements change with time and consequently, the
user does not have full control over them. This type of
scheduling problems which are more interesting but difficult
to solve, have been referred to as a protean system or
dynamic shop scheduling problems in the literature [11,12].
In this paper, we focus on the static job shop scheduling
problems and extend the neighborhood structure and the
tabu search method of Liu and Ong [5,10] for solving the
FSS, JSS, OSS and MSS problems to the GSS problem.
The rest of this paper is organized as follows. Section 2
describes the GSS problem. Section 3 presents three
neighborhood structures used by the tabu search for the
GSS problem. Section 4 outlines the tabu search algorithm
implemented in this study. The computational results for a
number of benchmark instances are presented in Section 5.
Finally, some concluding remarks are given in Section 6.
0 4 7
1 3 8
2 6
5 9
F L
Job 1 Job 2 Job 3
Machine 1
Machine 2
Machine 3
Machine 4
Fig. 2. Our representation method for the GSS instance shown Fig. 1.
2. Group shop scheduling
The GSS problem can be described as follows:
Given a set of operations O that is partitioned into subsets
JZ{J1, ., Jn}, and subsets MZ{M1, ., Mm}, where n is the
number of jobs, m is the number of machines. Ji is the set of
operations which belong to job i. Mk is the set of operations
which have to be processed on machine k. For each job i, the
operations are also partitioned into g groups GZ{G1, .,
Gg}. The operations in the same group are unrestricted while
operations in two distinct groups satisfy the precedence
relationship between the groups. If each group consists of
only one operation, this GSS problem turns out to be a JSS
problem. If for all Ji, the number of groups is equal to 1, the
GSS problem is equivalent to an OSS problem.
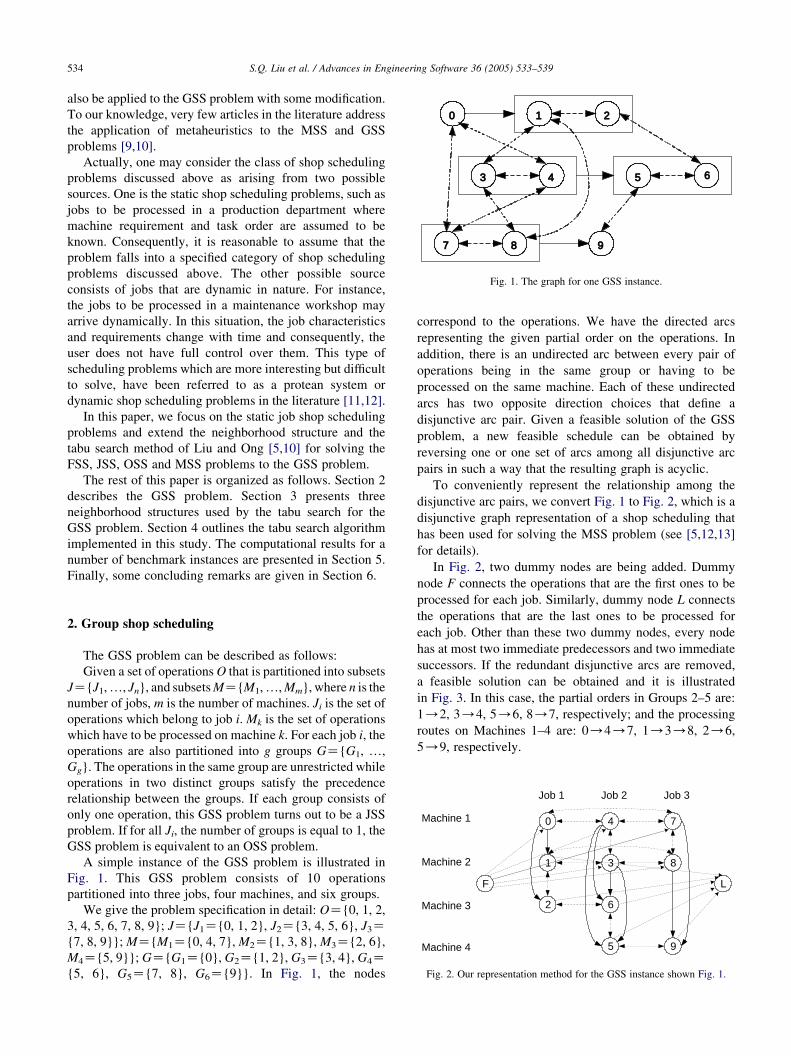
A simple instance of the GSS problem is illustrated in
Fig. 1. This GSS problem consists of 10 operations
partitioned into three jobs, four machines, and six groups.
We give the problem specification in detail: OZ{0, 1, 2,
3, 4, 5, 6, 7, 8, 9}; JZ{J1Z{0, 1, 2}, J2Z{3, 4, 5, 6}, J3Z{7, 8, 9}}; MZ{M1Z{0, 4, 7}, M2Z{1, 3, 8}, M3Z{2, 6},
M4Z{5, 9}}; GZ{G1Z{0}, G2Z{1, 2}, G3Z{3, 4}, G4Z{5, 6}, G5Z{7, 8}, G6Z{9}}. In Fig. 1, the nodes
correspond to the operations. We have the directed arcs
representing the given partial order on the operations. In
addition, there is an undirected arc between every pair of
operations being in the same group or having to be
processed on the same machine. Each of these undirected
arcs has two opposite direction choices that define a
disjunctive arc pair. Given a feasible solution of the GSS
problem, a new feasible schedule can be obtained by
reversing one or one set of arcs among all disjunctive arc
pairs in such a way that the resulting graph is acyclic.
To conveniently represent the relationship among the
disjunctive arc pairs, we convert Fig. 1 to Fig. 2, which is a
disjunctive graph representation of a shop scheduling that
has been used for solving the MSS problem (see [5,12,13]
for details).
In Fig. 2, two dummy nodes are being added. Dummy
node F connects the operations that are the first ones to be
processed for each job. Similarly, dummy node L connects
the operations that are the last ones to be processed for
each job. Other than these two dummy nodes, every node
has at most two immediate predecessors and two immediate
successors. If the redundant disjunctive arcs are removed,
a feasible solution can be obtained and it is illustrated
in Fig. 3. In this case, the partial orders in Groups 2–5 are:
1/2, 3/4, 5/6, 8/7, respectively; and the processing
routes on Machines 1–4 are: 0/4/7, 1/3/8, 2/6,
5/9, respectively.

0 4 7
1 3 8
2 6
5 9
F L
Job 1 Job 2 Job 3
Machine 1
Machine 2
Machine 3
Machine 4
Fig. 3. The graph for one GSS feasible schedule.
S.Q. Liu et al. / Advances in Engineering Software 36 (2005) 533–539 535
From Fig. 3, the complete sequence of arc pairs is given
as follows:
Job 1: 0/1, 1/2; Job 2: 3/4, 4/5, 5/6; Job 3: 8/7, 7/9;
Machine 1: 0/4, 4/7; Machine 2: 1/3, 3/8;
Machine 3: 2/6; Machine 4: 5/9;
3. The methodology for the GSS problem
3.1. The critical path and blocks
The orientations of the arc pairs in the GSS problem have
to be chosen in such a way that the length of a longest path
from node F to node L is to be minimized, i.e. the makespan
is to be minimized.
An operation is defined to be a critical operation if and
only if:
ei Cdi C li Z Cmax (1)
where di is the processing time of operation i; ei is the length
of a longest path from node F to node i, excluding di; li is the
length of a longest path from node i to node L, excluding di;
Cmax is the maximum completion time or makespan.
ei Z maxfePM½i� CdPM½i�; ePJ½i� CdPJ½i�g (2)
li Z maxflSM½i� CdSM½i�; lSJ½i� CdSJ½i�g (3)
where ei, di and liZ0 for nonexistent indices i; and
M[i] is the machine that processes operation i;
PM[i] is the operation processed on machine M[i] just
before operation i, if it exists;
SM[i] is the operation processed on machine M[i] just
after operation i, if it exists;
J[i] is the job in which operation i belongs;
PJ[i] is the operation belonging to job J[i] that just
precedes operation i, if it exists;
SJ[i] is the operation belonging to job J[i] that just
follows operation i, if it exists.
A critical path contains an ordered sequence of critical
operations from node F to node L. Furthermore, the critical
path can be decomposed into subsequences of operations,
called blocks. According to the characteristics of the GSS
problem, the useful blocks can be partitioned into two types,
in which one belongs to the same group and the other has to
be processed on the same machine. One major difference
between the GSS and MSS problems is that when applying
the methodology to the GSS, instead of directly using the
arc pairs of the blocks, we have to check whether the arc
pairs belong to the same group. Thus, the methodology for
solving the MSS problem can also be applied to the GSS
problem with small modification.
3.2. The method to determine the critical path
The method to calculate the ei and li values of each node i
and then to determine the critical path plays an important
part in solving the GSS problem. In the literature there are
some methods proposed for the computation of ei and livalues [5,14,15]. In this paper, we use the topological-
sequence method presented in [5] to compute the ei and livalues for each node i and then to determine the critical path
and blocks. The reason for selecting the topological-
sequence method is that this method is suitable for our
problem representation. Furthermore, the ei and li values as
well as estimates of makespan for the neighborhood moves
can be obtained by this method efficiently.
3.3. The neighborhood structure
The definition of the neighborhood structure has a great
effect on diversification and convergence in local search
procedures. Different neighborhood structures have differ-
ent properties, which may make them more or less suitable
depending on the particular problem to be solved. In this
study, we extend the neighborhood structures of
Dell’Amico and Trubian [16] and Liaw [6] for the JSS
and OSS problems to the GSS problem. Since the swap of
arc (i, j) cannot improve the makespan when both (PM[i], i)
and (j, SM[j]) or both (PJ[i], i) and (j, SJ[j]) are on a critical
path, we restrict our attention to the candidate arc, which is
the arc (i, j) of the blocks where either i is the first or j is the
last operation in a block. The proof for this property has also
been given in [5]. In this study, we divide the entire
neighborhood structure into two types, called Neighborhood
1 and Neighborhood 2.
Let bZ(b 0, x, b 00) denote a block, where b 0, and b 00 are
two subsets of b. When the operations of a candidate arc
(i, j) and the operations in block b are all processed on the
same machine, the following nine possible neighborhood
moves are considered:
Neighborhood 1:
(1)
Change b to (x, b 0, b 00).(2)
Change b to (b 0, b 00, x,).
S.Q. Liu et al. / Advances in Engineering Software 36 (2005) 533–539536
(3)
Change the set of arcs (PM[i], i, j) to (j, PM[i], i) ifPM[i] exists.
(4)
Change the set of arcs (PM[i], i, j) to (j, i, PM[i]) ifPM[i] exists.
(5)
Change the set of arcs (i, j, SM[j]) to (j, SM[j], i) if SM[j]exists.
(6)
Change the set of arcs (i, j, SM[j]) to (SM[j], j, i) if SM[j]exists.
(7)
Reverse arcs (i, j) and (PJ[j], j) at the same time if PJ[j]and j are in the same group.
(8)
Reverse arcs (i, j) and (i, SJ[i]) at the same time if i andSJ[i] are in the same group.
(9)
Reverse arcs (i, j), (PJ[j], j) and (i, SJ[i]) at the sametime if PJ[j] and j, i and SJ[i] are in the same group at
the same time.
When the operations of the candidate arc (i, j) and the
operations of block b are all in the same group, the following
nine possible neighborhood moves are considered:
Neighborhood 2:
(1)
Change b to (x, b 0, b 00).(2)
Change b to (b 0, b 00, x,).(3)
Change the set of arcs (PJ[i], i, j) to (j, PJ[i], i) if PJ[i]exists.
(4)
Change the set of arcs (PJ[i], i, j) to (j, i, PJ[i]) if PJ[i]exists.
(5)
Change the set of arcs (i, j, SJ[j]) to (j, SJ[j], i) if SJ[j]exists.
(6)
Change the set of arcs (i, j, SJ[j]) to (SJ[j], j, i) if SJ[j]exists.
(7)
Reverse arcs (i, j) and (PM[j], j) at the same time ifPM[j] exists.
(8)
Reverse arcs (i, j) and (i, SM[i]) at the same time ifSM[i] exists.
(9)
Reverse arcs (i, j), (PM[j], j) and (i, SM[i]) at the sametime if PM[j] and SM[i] exist at the same time.
For example, a possible neighborhood move for Case 1
of Neighborhood 1 is as follows:
PM[i]/i/j/SM[j]0j/PM[i]/i/SM[j]
The new ei and li values of the changed parameters can be
calculated as follows:
e0j Z maxfePM½PM½i�� CdPM½PM½i��; ePJ½j� CdPJ½j�g
e0PM½i� Z maxfePJ½PM½i�� CdPJ½PM½i��; e0j Cdjg
e0i Z maxfePJ½i� CdPJ½i�; e0PM½i� CdPM½i�g
l0i Z maxflSJ½i� CdSJ½i�; lSM½j� CdSM½j�g
l0PM½i� Z maxflSJ½PM½i�� CdSJ½PM½i��; l0i Cdig
l0j Z maxflSJ½j� CdSJ½j�; l0PM½i� CdPM½i�g
Z Z maxfe0j Cdj C l0j; e0PM½i� CdPM½i� C l0PM½i�; e
0i Cdi C l0ig
The value Z gives an estimate for the new makespan,
which is the length of the new longest path that passes
through at least one of nodes in the set {i, j, PM[i]}. In this
case, a directed cycle can occur if and only if there is a
directed path from SJ[PM[i]] to PJ[j], a directed path from
SJ[i] to PJ[j], or a directed path from SJ[i] to PJ[PM[i]] in
the new schedule. Therefore, this move is allowable only if
the following inequalities are satisfied:
ePJ½j� CdPJ½j�%eSJ½PM½i�� if PJ½j� and SJ½PM½i�� exist;
ePJ½j� CdPJ½j�%eSJ½i� if PJ½j� and SJ½i� exist;
ePJ½PM½i�� CdPJ½PM½i��%eSJ½i� if SJ½i� and PJ½PM½i�� exist:
4. The tabu search algorithm
The tabu search (TS) algorithm was initially proposed by
Glover in 1986 [17]. The basic ideas were also sketched by
Hansen in 1986 [18]. Additional formalizations for TS were
reported by Glover in 1989 and 1990 [19,20]. To our
knowledge, the first application of the TS algorithm to the
JSS problem was proposed by Taillard in 1994 [15]. Many
computational experiments have shown that TS has now
become an established approximation technique, which can
compete with almost all other known approaches.
The TS algorithm is an iterative improvement approach
designed to avoid terminating prematurely at a local
optimum for combinatorial optimization problems. Similar
to the simulating annealing (SA) and threshold accepting
(TA) algorithms, TS is based on the idea of exploring the
solution space of a problem by moving from one region of
search space to another in order to look for a better solution.
When a solution is stuck at a local optimum, SA or TA
attempts to escape from it by accepting an inferior solution,
which may lead to better solutions later. In contrast, TS
allows the search to move to the best solution among a set of
candidate moves as defined by the neighborhood structure.
However, subsequent iterations may cause the search to
move repeatedly back to the same local optimum. In order to
avoid cycling, moves that would bring back to a recently
visited solution should be forbidden or declared tabu for a
certain number of iterations. This is accomplished by
keeping the attributes of the forbidden moves in a list, called
tabu list.
The systematic use of memory is an essential feature of
tabu search. In this study, two types of tabu list are used as
the fundamental memory structure in TS to prevent cycling.
The first type of tabu list memorizes the complete job routes
on one machine as an element of this tabu list. In the
same fashion, the second type of tabu list keeps track of
the machine routes, that is, the assignment of machines for a
job. A move is admissible if the changed job route in

S.Q. Liu et al. / Advances in Engineering Software 36 (2005) 533–539 537
the new schedule does not have exactly the same order as
any element of the first type of tabu list, or the changed
machine route in the new schedule does not have exactly the
same order as any element of the second type of tabu list.
The definition of the tabu elements is the most important
feature for this TS algorithm.
Additionally, an aspiration criterion is defined to deal
with the case in which a move leading to a new best solution
is tabu. If a current tabu move satisfies the aspiration
criterion, its tabu status is canceled and it becomes an
allowable move. The use of the aspiration criterion allows
TS to lift the restrictions and intensify the search into a
particular solution region.
Furthermore, our computational experience reveals that
by using a large size of neighborhood space and tabu lists in
the TS algorithm, it would allow the search procedure to
find a solution which is close to the optimum faster, but this
could also cause the TS procedure to be stuck prematurely
after a certain number of iterations. To overcome this
drawback, we apply two methods to diversify the search
procedure: one is that we make randomized choices to
diminish the sizes of tabu lists and neighborhood space; the
other is that we incorporate the SA algorithm into the TS
algorithm and use the SA function to generate a new random
schedule. This strategy improves the performance of our TS
algorithm greatly. We deem this as a very important feature
of our TS algorithm which allows the algorithm to generate
very good solutions to the GSS problem.
5. Computational experiments
From the literature, there is only one real GSS instance,
whizzkids97 that is proposed for a mathematics competition
in 1997 at the TU Eindhoven, Netherlands [8]. However, all
other types of shop scheduling problems are special cases of
the GSS problem and so we can generate GSS instances
from the JSS benchmark instances.
To evaluate the performance of the TS algorithm
proposed in this study, we apply the algorithm to several
established benchmark instances taken from the literature.
These include the GSS benchmark instance generated from
the JSS problem instance ft10 (10 machines and 10 jobs,
[3]), la38 (15 machines and 15 jobs, [21]), and abz7
(15 machines and 20 jobs, [22]) by introducing groups of
various lengths into the jobs. All these GSS problem
instances used for testing the algorithms can be downloaded
from the website in [23]. The three sets of GSS instances
derived from ft10, la38, and abz7 are denoted by ft10_g,
la38_g, and abz7_g, respectively, where g is the group
length. For example, the GSS instance generated from ft10
with group length of 4 is denoted by ft10_4.
Our TS algorithm is coded in Visual CCC6.0 under
Microsoft Windows XP operating systems, running on a
Dell laptop with Intel Pentium IV 1.8 GHz processor and
256 Mb RAM. The results of the algorithm applied to 41
GSS instances are given in Table 1. The first column of
Table 1 indicates the problem instances. When the group
length is 1, these GSS instances (i.e. ft10_1, la38_1, and
abz7_1) are the original JSS instances. As the group length
increases, the instances are getting closer to the OSS
instances. When the group length is equal to m, these GSS
instances (i.e. ft10_10, la38_15, and abz7_15) become the
original OSS instances. In the second column of Table 1, the
best makespan values known in the literature are presented
for these benchmark GSS instances. The best solution found
in 20 runs, the average solution, the coefficient of variation
(defined to be the ratio of standard deviation/average!100),
and the average computation time are given in columns 3–6
of Table 1, respectively.
To provide a comparison of our TS algorithm against two
other methods, the ACO_GSS algorithm and the TS_GSS
algorithm recently proposed by Blum and Sampels [9], we
also show in Table 1 the results of these methods when
applied to the same instances. For ease of comparison, if the
solution found by our TS algorithm is better than the other
two methods, it is highlighted in bold.
In our TS algorithm, we do not set any limit on the
program running time. Since heuristics cannot be guaran-
teed to solve the GSS problem optimally, the best solution
found is compared with the well-known lower bound (LB)
value calculated by Eq. (4) [15]:
LB Z max maxj
Xn
iZ1
pij
( );max
i
Xm
jZ1
pij
( )( )(4)
The TS algorithm terminates when a solution is equal to
the LB value or the known optimal solution has been found,
or the number of iterations has reached a pre-specified
maximum iteration number.
The computational results are summarized as follows:
(a)
Our proposed TS algorithm can obtain very goodsolutions for most of the GSS benchmark instances. By
comparing the results obtained by the other two
approaches, our TS algorithm outperforms them in the
sense that it can achieve better performance based on
three measures: the best solution found, the coefficient
of variation, and the average computation time. It is
noted that the computational times for the other two
algorithms reported in [9] were based on a 1.1 GHz
AMD Athlon CPU, which is different from our 1.8 GHz
Pentium IV CPU and hence difficult to compare.
However, after factoring the different CPU speeds (i.e.
computation time/processor speed), our TS is still faster
in general. The solution to most of the problem
instances tested can be obtained in less than 5 min of
CPU time. Our algorithm is more robust in the sense
that it has the smallest coefficient of variation amongst
the three algorithms tabulated in Table 1. In particular,
our TS has found new best solutions in 9 instances out
of these 41 instances, i.e. ft10_2, ft10_3, ft10_4,
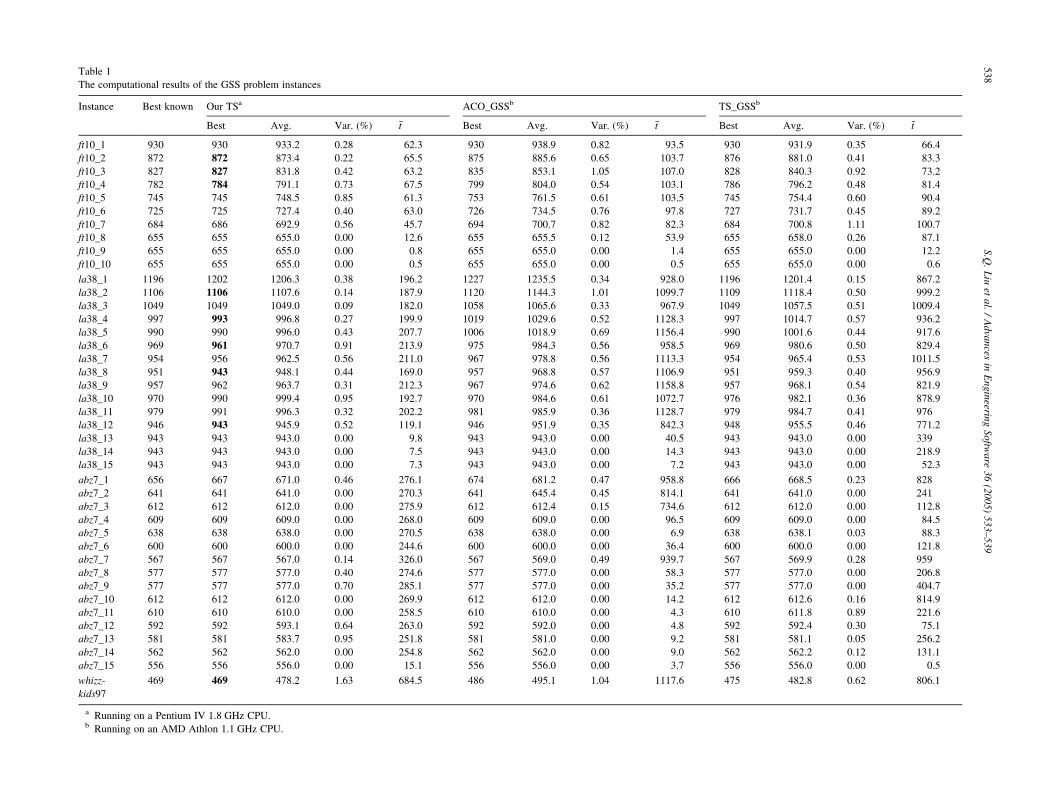
Table 1
The computational results of the GSS problem instances
Instance Best known Our TSa ACO_GSSb TS_GSSb
Best Avg. Var. (%) �t Best Avg. Var. (%) �t Best Avg. Var. (%) �t
ft10_1 930 930 933.2 0.28 62.3 930 938.9 0.82 93.5 930 931.9 0.35 66.4
ft10_2 872 872 873.4 0.22 65.5 875 885.6 0.65 103.7 876 881.0 0.41 83.3
ft10_3 827 827 831.8 0.42 63.2 835 853.1 1.05 107.0 828 840.3 0.92 73.2
ft10_4 782 784 791.1 0.73 67.5 799 804.0 0.54 103.1 786 796.2 0.48 81.4
ft10_5 745 745 748.5 0.85 61.3 753 761.5 0.61 103.5 745 754.4 0.60 90.4
ft10_6 725 725 727.4 0.40 63.0 726 734.5 0.76 97.8 727 731.7 0.45 89.2
ft10_7 684 686 692.9 0.56 45.7 694 700.7 0.82 82.3 684 700.8 1.11 100.7
ft10_8 655 655 655.0 0.00 12.6 655 655.5 0.12 53.9 655 658.0 0.26 87.1
ft10_9 655 655 655.0 0.00 0.8 655 655.0 0.00 1.4 655 655.0 0.00 12.2
ft10_10 655 655 655.0 0.00 0.5 655 655.0 0.00 0.5 655 655.0 0.00 0.6
la38_1 1196 1202 1206.3 0.38 196.2 1227 1235.5 0.34 928.0 1196 1201.4 0.15 867.2
la38_2 1106 1106 1107.6 0.14 187.9 1120 1144.3 1.01 1099.7 1109 1118.4 0.50 999.2
la38_3 1049 1049 1049.0 0.09 182.0 1058 1065.6 0.33 967.9 1049 1057.5 0.51 1009.4
la38_4 997 993 996.8 0.27 199.9 1019 1029.6 0.52 1128.3 997 1014.7 0.57 936.2
la38_5 990 990 996.0 0.43 207.7 1006 1018.9 0.69 1156.4 990 1001.6 0.44 917.6
la38_6 969 961 970.7 0.91 213.9 975 984.3 0.56 958.5 969 980.6 0.50 829.4
la38_7 954 956 962.5 0.56 211.0 967 978.8 0.56 1113.3 954 965.4 0.53 1011.5
la38_8 951 943 948.1 0.44 169.0 957 968.8 0.57 1106.9 951 959.3 0.40 956.9
la38_9 957 962 963.7 0.31 212.3 967 974.6 0.62 1158.8 957 968.1 0.54 821.9
la38_10 970 990 999.4 0.95 192.7 970 984.6 0.61 1072.7 976 982.1 0.36 878.9
la38_11 979 991 996.3 0.32 202.2 981 985.9 0.36 1128.7 979 984.7 0.41 976
la38_12 946 943 945.9 0.52 119.1 946 951.9 0.35 842.3 948 955.5 0.46 771.2
la38_13 943 943 943.0 0.00 9.8 943 943.0 0.00 40.5 943 943.0 0.00 339
la38_14 943 943 943.0 0.00 7.5 943 943.0 0.00 14.3 943 943.0 0.00 218.9
la38_15 943 943 943.0 0.00 7.3 943 943.0 0.00 7.2 943 943.0 0.00 52.3
abz7_1 656 667 671.0 0.46 276.1 674 681.2 0.47 958.8 666 668.5 0.23 828
abz7_2 641 641 641.0 0.00 270.3 641 645.4 0.45 814.1 641 641.0 0.00 241
abz7_3 612 612 612.0 0.00 275.9 612 612.4 0.15 734.6 612 612.0 0.00 112.8
abz7_4 609 609 609.0 0.00 268.0 609 609.0 0.00 96.5 609 609.0 0.00 84.5
abz7_5 638 638 638.0 0.00 270.5 638 638.0 0.00 6.9 638 638.1 0.03 88.3
abz7_6 600 600 600.0 0.00 244.6 600 600.0 0.00 36.4 600 600.0 0.00 121.8
abz7_7 567 567 567.0 0.14 326.0 567 569.0 0.49 939.7 567 569.9 0.28 959
abz7_8 577 577 577.0 0.40 274.6 577 577.0 0.00 58.3 577 577.0 0.00 206.8
abz7_9 577 577 577.0 0.70 285.1 577 577.0 0.00 35.2 577 577.0 0.00 404.7
abz7_10 612 612 612.0 0.00 269.9 612 612.0 0.00 14.2 612 612.6 0.16 814.9
abz7_11 610 610 610.0 0.00 258.5 610 610.0 0.00 4.3 610 611.8 0.89 221.6
abz7_12 592 592 593.1 0.64 263.0 592 592.0 0.00 4.8 592 592.4 0.30 75.1
abz7_13 581 581 583.7 0.95 251.8 581 581.0 0.00 9.2 581 581.1 0.05 256.2
abz7_14 562 562 562.0 0.00 254.8 562 562.0 0.00 9.0 562 562.2 0.12 131.1
abz7_15 556 556 556.0 0.00 15.1 556 556.0 0.00 3.7 556 556.0 0.00 0.5
whizz-
kids97
469 469 478.2 1.63 684.5 486 495.1 1.04 1117.6 475 482.8 0.62 806.1
a Running on a Pentium IV 1.8 GHz CPU.b Running on an AMD Athlon 1.1 GHz CPU.
S.Q
.L
iuet
al.
/A
dva
nces
inE
ng
ineerin
gS
oftw
are
36
(20
05
)5
33
–5
39
53
8

S.Q. Liu et al. / Advances in Engineering Software 36 (2005) 533–539 539
LA38_2, LA38_4, LA38_6, LA38_8, LA38_12, Whizz-
kids97, as highlighted in bold in Table 1.
(b)
To avoid premature convergence, the use of diversifica-tion mechanism, such as making probabilistic choices
for diminishing the sizes of the tabu list and neighbor-
hood space as well as incorporating the SA function into
the TS algorithm to generate a new random schedule
when the search procedure is stuck prematurely or after
a given number of iterations, has greatly improved the
performance of the algorithm. For example, in the
Whizzkid97 instance, our TS algorithm is able to get
the makespan value of 496 from the initial makespan of
3684 in about 40 s (or about 5000 iterations). However,
it is very difficult to achieve the optimal value of 469 if
the time to diversify the search procedure is not
sufficiently long.
(c)
It is our aim to develop a methodology which can workwell on all types of shop scheduling problems,
especially for the MSS and GSS problems introduced
recently. The computational experiments for the GSS
problem show that the proposed methodology are not
only efficient but also very robust, because it can also be
applied to the MSS, OSS, JSS, and FSS problems
successfully [10].
6. Conclusion
In this paper, we apply tabu search to the group shop
scheduling problem and evaluate the performance of the
algorithm on a set of benchmark problems. The compu-
tational results show that our tabu search algorithm is
typically more efficient and faster than the other methods
proposed in the literature. Furthermore, the proposed tabu
search method has found some new best solutions of the
benchmark instances.
The representation method for the GSS problem, the
approach to compute the ei and li values and then determine
the critical path, the neighborhood structure, and the
implementation of the TS algorithm are four significant
parts in solving the GSS problem. The different represen-
tation methods of the schedule provide many possible
avenues to define the neighborhood structure and
implementation of algorithms. The approach to compute
the makespan or the ei and li values has a great effect on the
computation time of the entire search procedure. A powerful
neighborhood structure would provide a good search
direction to find the optimum solution faster. The TS
algorithm seems to direct the local search to move away
from local minima and explore the feasible region in its
entirety effectively with the use of diversification
mechanism.
It has been demonstrated that the proposed TS method-
ology is an efficient method for solving the GSS problem.
A further extension to this study is to apply the TS
methodology to other types of scheduling problems such as
the GSS problem in a dynamic scheduling environment and
the GSS problem in which the job information is partially
known.
Acknowledgements
The authors would like to thank the referees for their
constructive comments and suggestions that contributed to
the improvement of this paper.
References
[1] Garey MR, Johnson DS, Sethi R. The complexity of flowshop and
jobshop scheduling. Math Oper Res 1976;1:117–29.
[2] Lenstra JK, Rinnooy Kan AHG, Brucker P. Complexity of machine
scheduling problems. Ann Discrete Math 1977;1:343–62.
[3] Fisher H, Thompson GL. Probabilistic learning combinations of local
job-shop scheduling rules. Industrial scheduling. Englewood Cliffs,
NJ: Prentice Hall; 1963 p. 225–51.
[4] Carlier J, Pinson E. An algorithm for solving the job shop problem.
Manage Sci 1989;35:164–76.
[5] Liu SQ, Ong HL. A comparative study of algorithms for the flowshop
scheduling problem. Asia-Pacific J Oper Res 2002;19(2):205–22.
[6] Liaw CF. A tabu search algorithm for the open shop scheduling
problem. Comput Oper Res 1999;26:109–26.
[7] Masuda T, Ishii H, Nishida T. The mixed shop scheduling problem.
Discrete Appl Math 1985;11:175–86.
[8] http://www.win.tue.nl/whizzkids/1997, 1997.
[9] Blum C, Sampels M. An ant colony optimization algorithm for shop
scheduling problems. J Math Modell Algorithms 2004;3:285–308.
[10] Liu SQ, Ong HL. Metaheuristics for the mixed shop scheduling
problem. Asia-Pacific J Oper Res 2004;21(1):97–115.
[11] Kumar S. In: Masanori F, Kaoru T, editors. Optimization of protean
systems: a review, APORS 94, Fukuoka, Japan. World Scientific
Publishers; 1995. p. 139–46.
[12] Liu SQ, Ong HL, Ng KM. Metaheuristics for minimizing the
makespan of the dynamic shop scheduling problem. Adv Eng
Software 2005; 36:199–205.
[13] Roy B, Sussmann B. Les problems d’ordonnancement avec contra-
intes. Technique Report 9, SEMA. Note D.S. Paris; 1964.
[14] Bellman RE. On a routing problem. Q Appl Math 1958;16:87–90.
[15] Taillard E. Parallel taboo search techniques for the job shop
scheduling problem. ORSA J Comput 1994;6(2):108–17.
[16] Dell’Amico M, Trubian M. Applying tabu search to the job shop
scheduling problem. Ann Oper Res 1993;41:231–52.
[17] Glover F. Future paths for integer programming and links to artificial
intelligence. Comput Oper Res 1986;13:533–49.
[18] Hansen P. The steepest ascent mildest descent heuristic for
combinatorial programming. Talk presented at the Congress on
Numerical Methods in Combinatorial Optimization 1986, Capri.
[19] Glover F. Tabu search-part I. ORSA J Comput 1989;1(3):190–206.
[20] Glover F. Tabu search-part II. ORSA J Comput 1990;2(1):4–32.
[21] Lawrence S. Resource constrained project scheduling: an experimen-
tal investigation of heuristic scheduling techniques (supplement).
Technical report, Graduate School of Industrial Administration.
Pittsburgh: Carnegie Mellon University; 1984.
[22] Adams J, Balas E, Zawack D. The shifting bottleneck procedure for
job shop scheduling. Manage Sci 1988;34(3):391–401.
[23] http://www.lsi.upc.es/~cblum/.