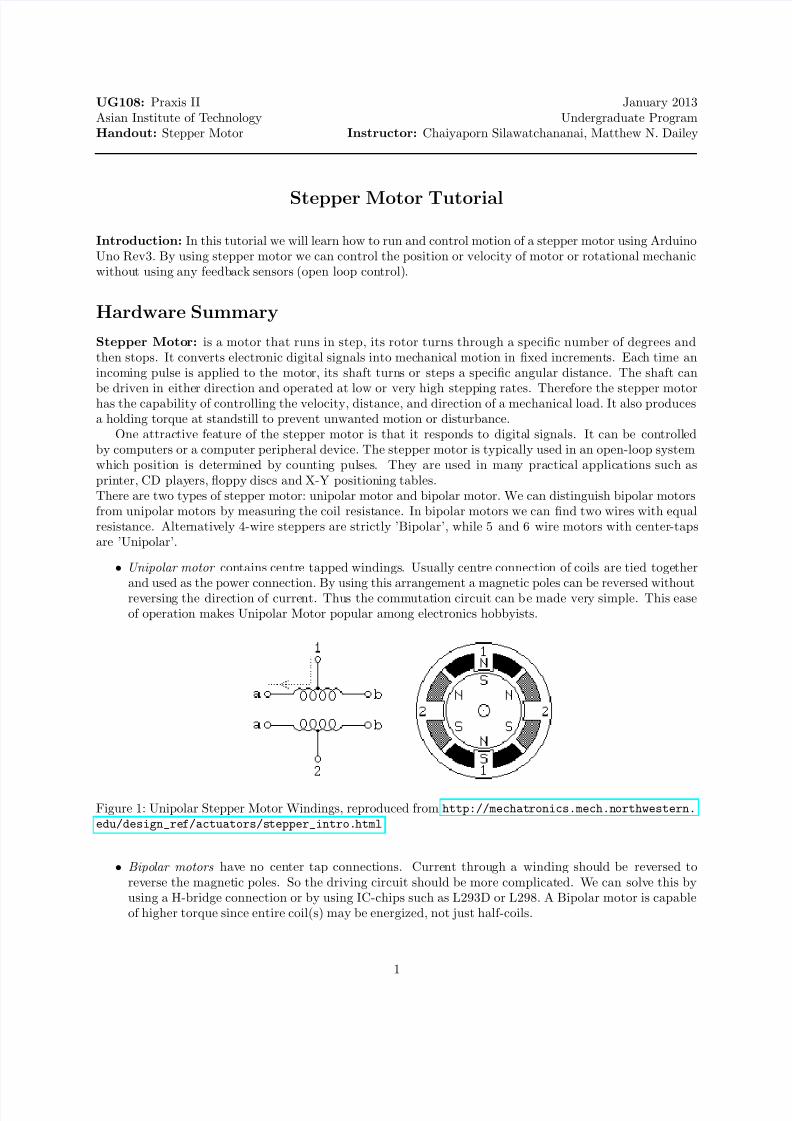
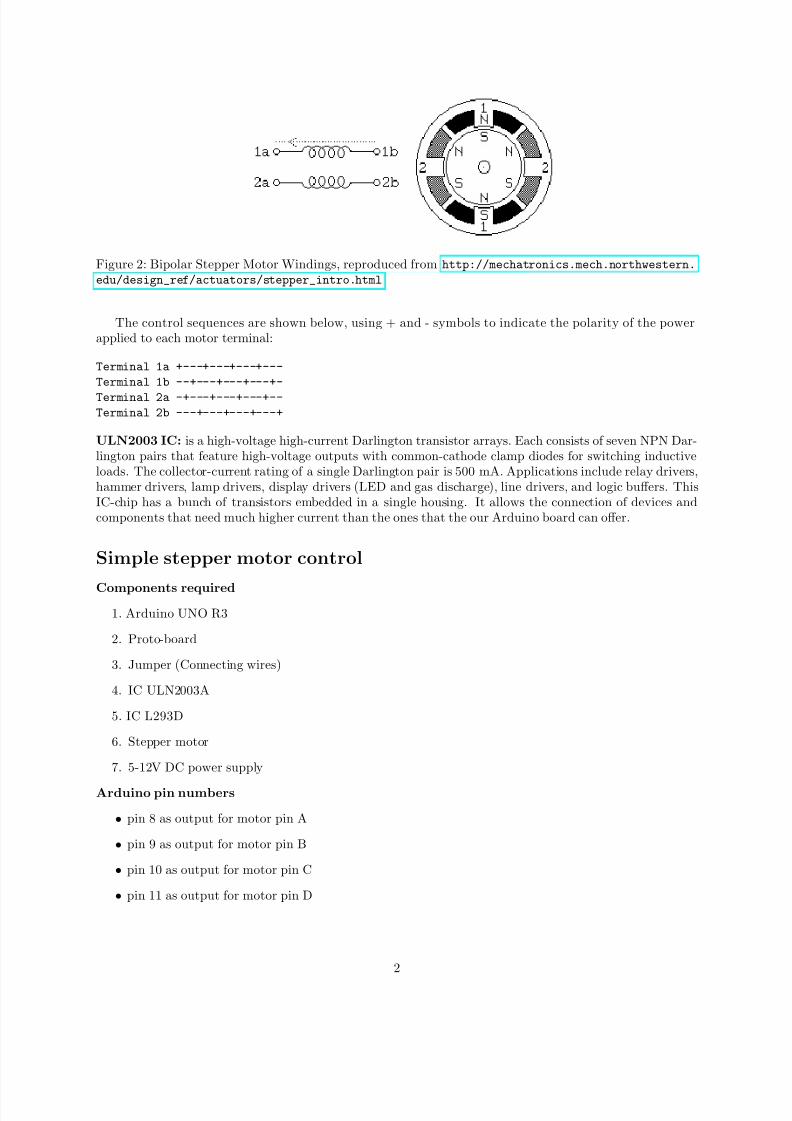
UG108: Praxis II January 2013 Asian Institute of T echnology Undergraduate Program Handout: Stepper Motor Instructor: Chaiyaporn Silawatchananai, Matthew N. Dailey Stepper Motor Tutorial Introduction: In this tutorial we will learn how to run and control motion of a stepper motor using Arduino Uno Rev3. By using stepper motor we can control the position or velocity of motor or rotational mechanic without using any feedb ack sensors (open loop con trol) . Hardware Summary Stepper Motor: is a motor that runs in step, its rotor turns through a specific number of degrees and then stops. It conv erts electronic digital signals into mechanical motion in fixed increments. Each time an incoming pulse is applied to the moto r, its shaft turn s or steps a specific angular distance. The shaft can be driven in eithe r direction and operated at low or ver y high stepp ing rates. There fore the stepper motor has the capability of controlling the velocity, distance, and direction of a mechanical load. It also produces a holding torque at standstill to prevent unwanted motion or disturbance. One attrac tive fea ture of the stepper motor is that it responds to digital signals. It can be controlled by computers or a computer peripheral device. The stepper motor is typically used in an open-loop system which position is determined by counting pulses. They are used in many pra cti cal applic ati ons such as printer, CD players, floppy discs and X-Y position ing tables. There are two types of stepper motor: unipolar motor and bipolar motor. We can distinguish bipolar motors from unipolar motors by measur ing the coil resist ance. In bipolar motors we can find two wires with equal resistance. Alter nativ ely 4-wire steppers are strictly ’Bipolar’, while 5 and 6 wire motors with center -taps are ’Unipolar’. • Unipolar motorcon tains centr e tapped windings . Usually cent re connectio n of coils are tied toge ther and used as the power connection. By using this arrangement a magnetic poles can be reversed without reversing the direction of curre nt. Thus the commutat ion circuit can be made very simple. This ease of operation makes Unipolar Motor popular among electronics hobbyists. Figure 1: Unipolar Stepper Motor Windings, reproduced fromhttp://mechat ronics.mech.n orthwestern. edu/design_re f/actuators/s tepper_intro.html • Bipo lar motorshav e no cen ter tap connect ions. Current through a winding shou ld be rev ersed to reverse the magnetic poles. So the driving circuit should be more complicated. We can solve this by using a H-bridge connection or by using IC-chips such as L293D or L298. A Bipolar motor is capable of higher torque since entire coil(s) may be energized, not just half-coils. 1