МЕЖДУНАРОДНЫЙ НАУЧНЫЙ ЖУРНАЛ · pdf filereal time, ucos-ii, uitron...
TRANSCRIPT
МЕЖДУНАРОДНЫЙ НАУЧНЫЙ ЖУРНАЛ «ИННОВАЦИОННАЯ НАУКА» №7/2015 ISSN 2410-6070
25
напряжения больше опорного, компаратор подает сигнал на микроконтроллер. Сухой контакт требует питания, которое реализуется линией от блока питания с напряжением 24 В.
Для передачи сигнала на сухой контакт используется твердотельное реле. МК формирует управляющее воздействие и при его подаче, реле передает сигнал с напряжением 24В и током 2А с источника питания на контакт. Использование именно твердотельного реле обуславливается их небольшими размерами, которые позволяют свободно монтировать их на платы. Также они имеют много других преимуществ: высокое быстродействие, отсутствие акустического шума, дребезжания и искрения, энергопотребление.
Аналоговые входы – пара контактов, по которым течет ток 4-20 мА. Уровень сигнала передается силой тока. Для регистрации этого уровня, контакты подключаются к прецизионным резисторам 250 Ом и значение снимается уже по напряжению 1-5 В. Оно передается на АЦП для оцифровки и передачи в МК.
Аналоговые выходы – на МК с помощью ЦАП генерируется сигнал 1-5 В. Он подается на прецизионный резистор 250 Ом для генерации на контактах сигнала 4-20 мА.
Список использованной литературы: 1. Программируемые контроллеры. Стандартные языки и приемы прикладного проектирования. И. В. Петров. Под редакцией проф. В. П. Дьяконова. Москва СОЛОН-Пресс, 2004. 2. http://www.owen.ru/ 3. http://new.abb.com/ 4. http://www.ia.omron.com/ 5. http://www.schneider-electric.com/
© И.П. Гусев, 2015
УДК 608.2 И.П. Гусев
Бакалавр Направление «Информатика и вычислительная техника»
НИУ «МИЭТ»
г. Зеленоград, Российская Федерация ВЫБОР СПОСОБА ОРГАНИЗАЦИИ ИНТЕГРИРОВАННОЙ СРЕДЫ УПРАВЛЕНИЯ ПРИ
РАЗРАБОТКЕ ПРОГРАММИРУЕМОГО ЛОГИЧЕСКОГО КОНТРОЛЛЕРА.
Аннотация В работе исследованы способы организации интегрированной среды управления для
программируемого логического контроллера и выбран оптимальный способ. Ключевые слова
Среда управления, программируемый логический контроллер, автоматизированная среда управления 1. Анализ существующих на рынке решений. Разрабатывать собственную среду управления для программируемого логического контроллера(далее
ПЛК) слишком долго и сложно, а значит дорого. На рынке существует много готовых программных продуктов нацеленных на работу с ПЛК. Описать все невозможно, поэтому назовем основные.
Существующие среды управления можно разделить на специализированные (для одного производителя или даже ПЛК) и унифицированные.
Специализированные рассмотрим на примере системы CX-One компании Omron. Она имеет следующие особенности.
Поддержка всех моделей ПЛК Omron серий CS, CJ, CP; всех терминалов серии NS; всех моделей контроллера управления движением Trajexia
Поддержка языка программирования SFC и полная поддержка языка ST для ПЛК серий CS/CJ
МЕЖДУНАРОДНЫЙ НАУЧНЫЙ ЖУРНАЛ «ИННОВАЦИОННАЯ НАУКА» №7/2015 ISSN 2410-6070
26
Встроенный симулятор программы; резервное копирование и восстановление параметров контроллера; редактирование программы “на лету” (Online Edit) [1]
Стандарт IEC 61131-3 содержит 5 языков: Instruction List (IL), Ladder Diagram (LD), Function Block Diagram (FBD), Sequential Function Chart (SFC), Structured Text (ST). Из них SX-One поддерживает только 2. Так же эта среда работает только с системами компании Omron. Схожие недостатки имеют все специализированные среды управления: малая линейка поддерживаемой продукции и ограниченная функциональность.
Унифицированных систем также много, поэтому рассмотрим только наиболее известные. ISaGRAF - программная технология для разработки встраиваемых приложений. Устойчивость к
сбоям, способность обрабатывать большое количество точек ввода/вывода позволяют с успехом применять ISaGRAF как в небольших встраиваемых приложениях, так и в распределенных проектах автоматизации.
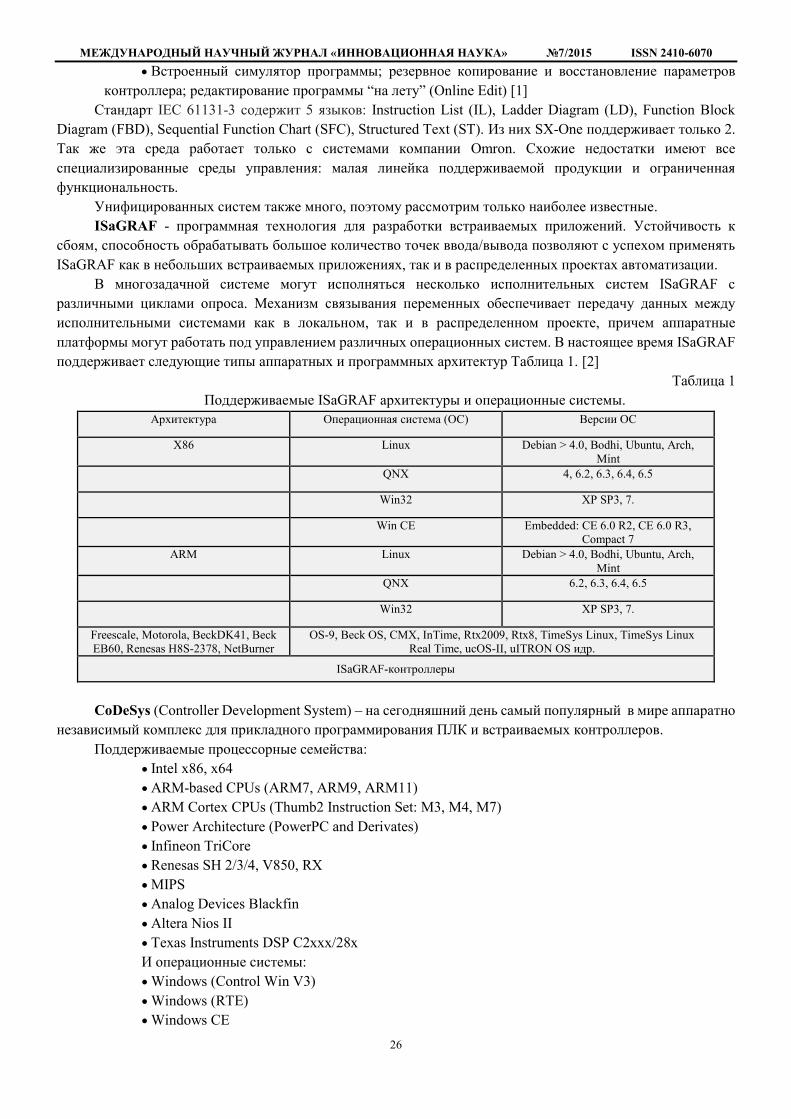
В многозадачной системе могут исполняться несколько исполнительных систем ISaGRAF с различными циклами опроса. Механизм связывания переменных обеспечивает передачу данных между исполнительными системами как в локальном, так и в распределенном проекте, причем аппаратные платформы могут работать под управлением различных операционных систем. В настоящее время ISaGRAF поддерживает следующие типы аппаратных и программных архитектур Таблица 1. [2]
Таблица 1 Поддерживаемые ISaGRAF архитектуры и операционные системы.
Архитектура Операционная система (ОС) Версии ОС
Х86 Linux Debian > 4.0, Bodhi, Ubuntu, Arch, Mint
QNX 4, 6.2, 6.3, 6.4, 6.5
Win32 XP SP3, 7.
Win CE Embedded: CE 6.0 R2, CE 6.0 R3, Compact 7
ARM Linux Debian > 4.0, Bodhi, Ubuntu, Arch, Mint
QNX 6.2, 6.3, 6.4, 6.5
Win32 XP SP3, 7.
Freescale, Motorola, BeckDK41, Beck EB60, Renesas H8S-2378, NetBurner
OS-9, Beck OS, CMX, InTime, Rtx2009, Rtx8, TimeSys Linux, TimeSys Linux Real Time, ucOS-II, uITRON OS идр.
ISaGRAF-контроллеры
CoDeSys (Controller Development System) – на сегодняшний день самый популярный в мире аппаратно
независимый комплекс для прикладного программирования ПЛК и встраиваемых контроллеров. Поддерживаемые процессорные семейства:
Intel x86, x64 ARM-based CPUs (ARM7, ARM9, ARM11) ARM Cortex CPUs (Thumb2 Instruction Set: M3, M4, M7) Power Architecture (PowerPC and Derivates) Infineon TriCore Renesas SH 2/3/4, V850, RX MIPS Analog Devices Blackfin Altera Nios II Texas Instruments DSP C2xxx/28x И операционные системы: Windows (Control Win V3) Windows (RTE) Windows CE
МЕЖДУНАРОДНЫЙ НАУЧНЫЙ ЖУРНАЛ «ИННОВАЦИОННАЯ НАУКА» №7/2015 ISSN 2410-6070
27
Linux VxWorks QNX “Bare metal” with runtime toolkit adaptation iOS, INTEGRITY, OSEK, Norti, PxROS, Quadros, RTX, uCOS, Nucleus, ... Может быть адаптирован под другие ОС
Комплекс CoDeSys имеет широкую функциональность: Исполнение кода ПЛК компилированного в CODESYS Компиляция для загрузки и отладки Чтение I/O Управление Retain данными Многозадачность Библиотеки Символьные интерфейсы Выполнение визуализации и SoftMotion Масштабируемость Открытость для расширения [3, с. 9-10]
Благодаря универсальности и широкой функциональности была выбрана система CoDeSys как наиболее популярная и знакомая разработчикам автоматизированных систем управления (АСУ).
2. Особенности применения системы CoDeSys в качестве среды управления для ПЛК. Задача разработки интегрированной системы управления сводится к тому, чтобы «научить» совместно
работать разрабатываемый программируемый логический контроллер и систему CoDeSys. Для этого нужно адаптировать систему исполнения CoDeSys к аппаратным и программным средствам контроллера.
Компания 3S-Smart Software Solutions разработала специальный SDK (software development kit) — комплект средств разработки, который позволяет специалистам по программному обеспечению создавать приложения для определённого пакета программ, программного обеспечения базовых средств разработки, аппаратной платформы, компьютерной системы, игровых консолей, операционных систем и прочих платформ. Он называется Control Runtime Toolkit. С его помощью можно адаптировать систему исполнения фактически к любому программируемому логическому контроллеру, если его микропроцессор, относится к одному из семейств, унифицированных с CoDeSys.
Для того, чтобы адаптировать систему исполнения CoDeSys к программируемому логическому контроллеру, первым делом нужно выбрать микроконтроллер, который ляжет в его основу. Применение процессора, к которому адаптирован CoDeSys, сильно упростит и ускорит разработку.
3. Выбор операционной системы. Адаптация системы исполнения – не простая задача. При отсутствии операционной системы придется
самостоятельно организовывать множество задач: • Координация работы портов ввода/вывода • Загрузка в ОЗУ программ и выполнение. • Распределение между процессами оперативной памяти. • Организация доступа к данным на энергонезависимых носителях • Реализация запросов программ на ввод и вывод данных, выделение и освобождение дополнительной
памяти, запуск и остановку других программ и др. • Гарантия надёжных вычислений (неспособность одного вычислительного процесса повлиять на
вычисления в другом), разграничение доступа к ресурсам. • Стандартизация доступа к периферийным устройствам. • Каталогизация информации об ошибках системы. • Параллельное/псевдопараллельное выполнение задач (многозадачность). • Наилучшее распределение ресурсов вычислительной системы между процессами. • Разграничение процессов при доступе к ресурсам. • Обмен данными, взаимная синхронизация, взаимодействие между процессами.
МЕЖДУНАРОДНЫЙ НАУЧНЫЙ ЖУРНАЛ «ИННОВАЦИОННАЯ НАУКА» №7/2015 ISSN 2410-6070
28
Таким образом, чтобы значительно сократить время разработки устройства и итоговую стоимость, необходимо установить операционную систему. Для этих целей существует выбор из пригодных к использованию на разработанном устройстве систем. Но не под всех из них адаптирована встраиваемая в микроконтроллер часть CoDeSys. Для высокопроизводительных систем на мощных контроллерах выбор из ОС остается широким и зависит от желания разработчика. Это может быть система Windows NT/2000/XP или один из дистрибутивов Linux. Для ПЛК на малопроизводительных процессорах следует выбирать специализированные ОС для встраиваемых систем, например, WinCe или Embedded Linux. Для систем без блока MMU (блока управления памятью) ситуация ещё сложнее и в этом случае подойдут ОС μClinux - порт Linux или VxWorks.
4. Адаптация CoDeSys для среды управления ПЛК При наличии операционной системы, нужно лишь организовать связь системы исполнения с ней. Для
многих популярных ОС 3S-Smart Software Solutions разработали готовые решения. Если система на контроллере входит в их список, тогда с помощью CODESYS Control Runtime Toolkit можно получить готовый исполняемый файл от официального разработчика. Но это не всё- необходимо сообщить встраиваемой в микроконтроллер части CoDeSys состав и способы связи с контактами ввода/вывода.
После установки ОС необходимо установить драйверы периферийных устройств. Далее с помощью приобретенной копии CODESYS Control Runtime Toolkit получить исполняемый файл системы исполнения. Следующий шаг- организовать связь исполняемой системы с портами ввода/вывода.
В результате будет получен ПЛК программируемый с помощью среды CoDeSys. Так же в CoDeSys имеются встроенные средства визуализации, позволяющие следить за работой контроллера в реальном времени и моделировать различные состояния системы.
Список использованной литературы: 1. http://industrial.omron.ru/ru/products/catalogue/automation_systems/software/configuration/cx-one/ 2. http://isagraf.ru/isagraf-glavnaya/isagraf 3. http://www.prolog-plc.ru/docs/conf15/Make_the_Right_Choice.pdf
© И.П. Гусев, 2015
УДК 336 А.А. Зародов
А.Е. Манохин к.т.н., доцент
Институт радиоэлектроники и информационных технологий-Радиотехнический факультет Уральский Федеральный Университет им. первого Президента РФ Б.Н.Ельцина
г. Екатеринбург, Российская Федерация О СПЕКТРАЛЬНЫХ И БИСПЕКТРАЛЬНЫХ МЕТОДАХ АНАЛИЗА СИГНАЛОВ.
Аннотация
На протяжении последних 30 лет, особенно на фоне резкого роста производительности вычислительных средств, для более тонкой обработки сигналов зачастую используется их полиспектральное представление.
Ключевые слова Полиспектральное представление сигнала, преобразование Фурье, кумулянтная функция, биспетр и
триспектр. При оценивании спектральной плотности мощности какого-либо процесса используют прямое
преобразование Фурье от его автокорреляционной функции. Смысл оценивания состоит в том, чтобы получить суперпозицию статистически некоррелированных гармонических составляющих исследуемого