магнитный трекер emit
TRANSCRIPT
Магнитный трекерEMIT
Евгений ЧернышовРуководитель проекта
Аспирант ТОГУ

В настоящее время крайне актуальными являются задачи:
• естественного, эффективного и интуитивного взаимодействия с виртуальной и дополненнойреальностью, современными средствами 3D моделирования;
• эффективного дистанционного управления роботами-манипуляторами для проведениянетиповых работ во вредных и опасных средах, с опасными веществами;
• измерения пространственного положения объектов в реальном времени в различныхкомплексных системах (рой роботов, роботизированный склад, установка горизонтальногобурения, портативный сканер для неразрушающего контроля, аппарат УЗИ и т.д.)
2
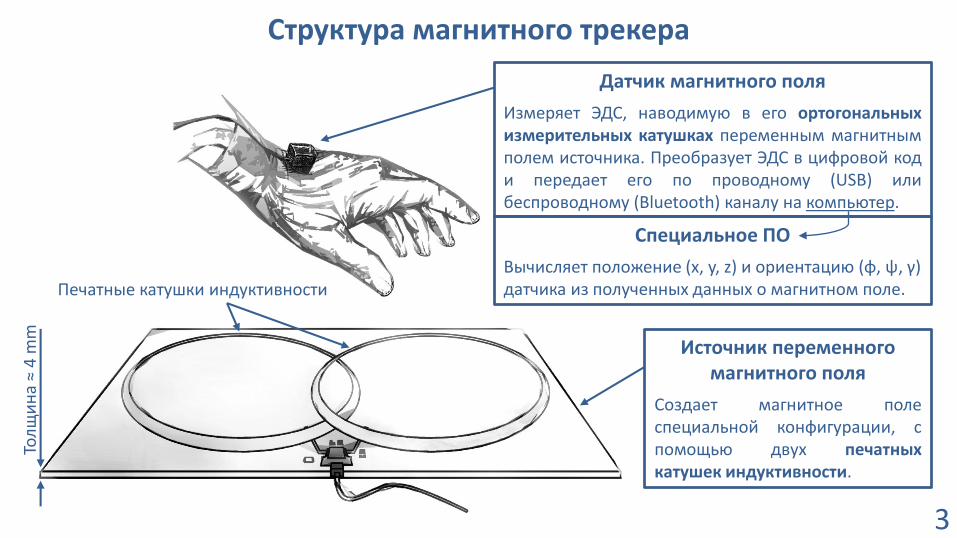
Печатные катушки индуктивности
Тол
щи
на
≈ 4
mm
Источник переменного магнитного поля
Создает магнитное полеспециальной конфигурации, спомощью двух печатныхкатушек индуктивности.
Датчик магнитного поля
Измеряет ЭДС, наводимую в его ортогональныхизмерительных катушках переменным магнитнымполем источника. Преобразует ЭДС в цифровой коди передает его по проводному (USB) илибеспроводному (Bluetooth) каналу на компьютер.
Специальное ПО
Вычисляет положение (x, y, z) и ориентацию (φ, ψ, γ) датчика из полученных данных о магнитном поле.
3
Структура магнитного трекера
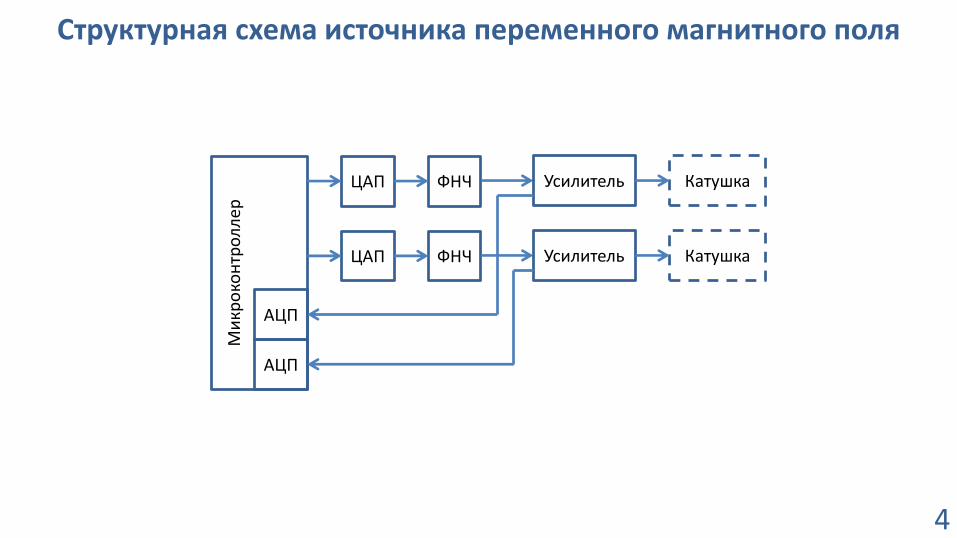
ФНЧ КатушкаЦАП Усилитель
Ми
кро
кон
тро
лл
ер
АЦП
АЦП
ФНЧ КатушкаЦАП Усилитель
Структурная схема источника переменного магнитного поля
4

Чувствительный элемент
Усилитель с управляемым
усилениемФНЧ АЦП
Ми
кро
кон
тро
лл
ер
Чувствительный элемент
Усилитель с управляемым
усилениемФНЧ АЦП
Чувствительный элемент
Усилитель с управляемым
усилениемФНЧ АЦП
ДрайверВибромотор
Цифровой инерциальный навигационный
модуль 6DoF(акселерометр +
гироскоп)
Структурная схема датчика магнитного поля
5
6
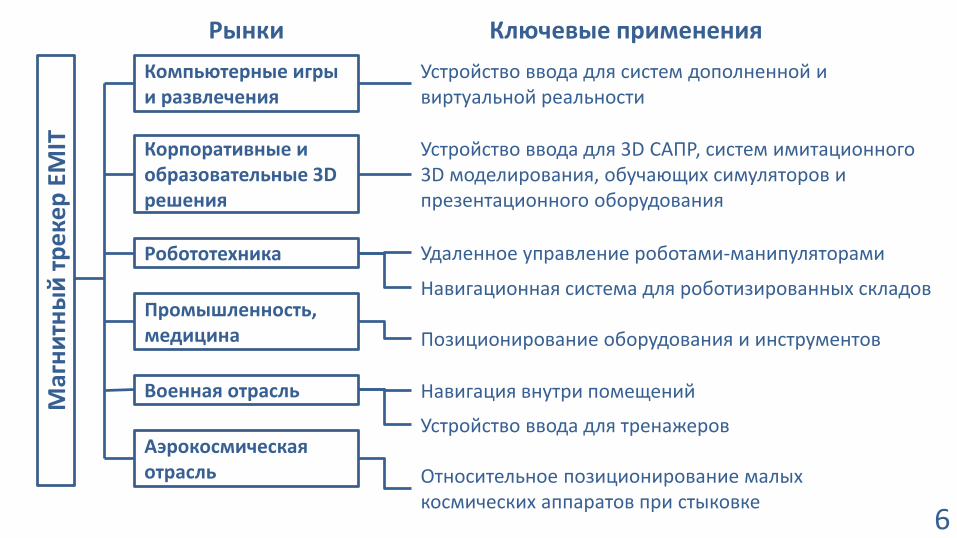
Компьютерные игры и развлечения
Маг
ни
тны
й т
ре
кер
EMIT Корпоративные и
образовательные 3Dрешения
Робототехника
Рынки Ключевые применения
Устройство ввода для систем дополненной и виртуальной реальности
Устройство ввода для 3D САПР, систем имитационного 3D моделирования, обучающих симуляторов и презентационного оборудования
Удаленное управление роботами-манипуляторами
Навигационная система для роботизированных складов
Позиционирование оборудования и инструментов
Устройство ввода для тренажеров
Навигация внутри помещений
Аэрокосмическая отрасль Относительное позиционирование малых
космических аппаратов при стыковке
Промышленность, медицина
Военная отрасль

«… оценивается, что в 2014 году количество проданных устройств составит 200 тысяч…В 2015 году продажи прогнозируются на уровне 5.7 миллионов устройств, а в 2018 году онивырастут до 23.8 миллионов устройств. Суммарное количество проданных устройств нарынке виртуальной реальности с 2014 по 2018 год будет составлять 56.8 миллионов.»
Пресс-релиз агентства KZero от 8 Мая 2014 г.
7
$2.4 млрд
Оценка рынка виртуальной реальности
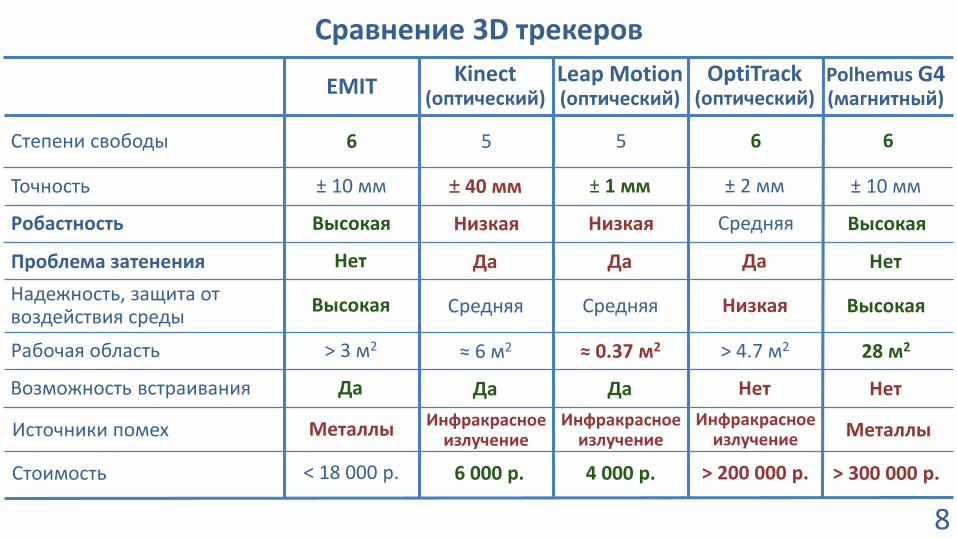
< 18 000 р.
Металлы
Да
Нет
Высокая
± 10 мм
66
Сравнение 3D трекеров
> 200 000 р.
± 40 мм
НизкаяРобастность
EMIT
ВысокаяНадежность, защита от воздействия среды
Степени свободы 5
Проблема затенения
> 3 м2
Источники помех
Точность
Стоимость
Kinect(оптический)
Рабочая область
Возможность встраивания
Средняя
Да
≈ 6 м2
Инфракрасное излучение
Да
± 1 мм
Низкая
5
Leap Motion(оптический)
Средняя
Да
≈ 0.37 м2
Инфракрасное излучение
4 000 р.
Да
± 2 мм
Средняя
OptiTrack(оптический)
Низкая
Да
> 4.7 м2
Инфракрасное излучение
Нет
± 10 мм
Высокая
Polhemus G4(магнитный)
Высокая
Нет
28 м2
Металлы
> 300 000 р.
Нет
8
6
6 000 р.
Евгений ЧернышовГлавный инженер проекта, разработчик технологии, инженер-системотехник, аспирант ТОГУ
Людмила КотоваМенеджер проекта, директор по развитию бизнеса ООО “Континент-Тау”
Егор ШундеевПрограммист встраиваемых систем, инженер-схемотехник;эксперт в области фундаментальной физики и математики
Сергей ВеселовскийПрограммист на языках высокого уровня, веб-программист
Рудольф ХалиловНаучный консультант, инженер-геофизик, директор ООО “ИТАР”;имеет огромный опыт в области магнитных измерений
Команда
9
10
Текущие наработки по проекту и успехи• В рамках научного исследования в 2012-2013 годах разработаны основы метода
магнитного позиционирования. По данной работе опубликовано 4 научных статьи,защищена магистерская диссертация
• Разработан прототип устройства, который был продемонстрирован на выставке«НТТМ-2013», г.Москва
• Получен патент на полезную модель № 137953 “Устройство для определенияположения объекта в пространстве”
• Победа в региональном этапе Всероссийского конкурса Russian Startup Tour 2014,г.Хабаровск
• Участие во Всероссийской конференции Startup Village (фонд “Сколково”),г.Москва, 2014г. Получено приглашение стать резидентом фонда “Сколково”
• Положительное решение экспертизы по заявке на изобретение № 2013142297
• Изготовлен стенд, демонстрирующий возможность жестового управленияроботом-манипулятором с помощью разрабатываемого трекера
• В настоящее время производится радикальная переработка технологиипозиционирования с целью значительного улучшения характеристик и снижениястоимости конечного продукта. Начата разработка второго прототипа
Партнеры проекта
Заинтересовались проектом
Готовы оказать поддержку проекту (оборудование, софт, доброе слово)
11
12
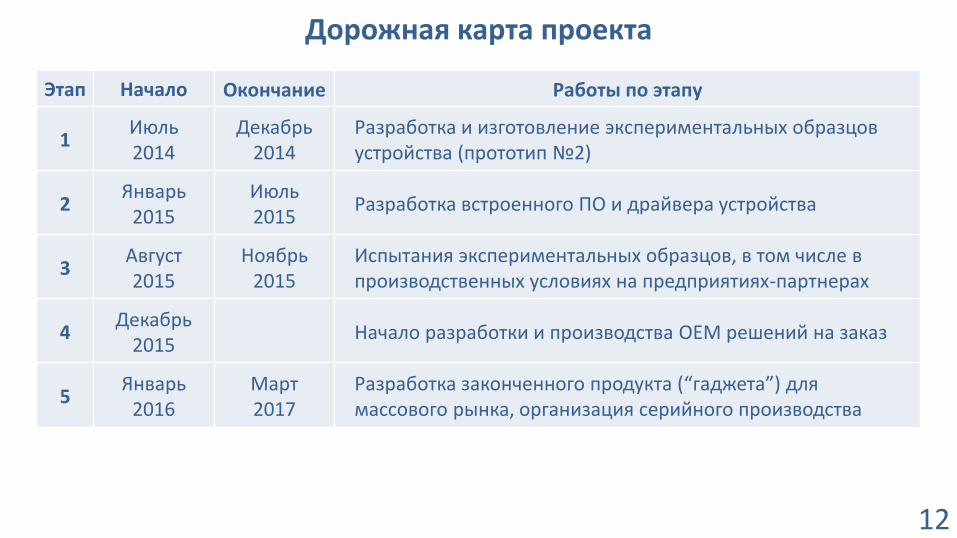
Дорожная карта проекта
Этап Начало Окончание Работы по этапу
1Июль 2014
Декабрь2014
Разработка и изготовление экспериментальных образцов устройства (прототип №2)
2Январь
2015Июль2015
Разработка встроенного ПО и драйвера устройства
3Август2015
Ноябрь2015
Испытания экспериментальных образцов, в том числе в производственных условиях на предприятиях-партнерах
4Декабрь
2015Начало разработки и производства OEM решений на заказ
5Январь
2016Март2017
Разработка законченного продукта (“гаджета”) для массового рынка, организация серийного производства
