נושא הפרויקט : עקיבה אחר שתי מטרות מתנגשות בעזרת מסנן...
DESCRIPTION
נושא הפרויקט : עקיבה אחר שתי מטרות מתנגשות בעזרת מסנן קלמן. מגישים: דניאל דורון ורוט בועז מנחה: ד"ר גבי דוידוב. נושאי הדיון. עקיבה אחר מטרות איטיות בעזרת אלגוריתם IMM מסדר שני ושלישי . - PowerPoint PPT PresentationTRANSCRIPT
נושא הפרויקט :
עקיבה אחר שתי מטרות מתנגשות בעזרת מסנן קלמן.
מגישים: דניאל דורון ורוט בועז
מנחה: ד"ר גבי דוידוב
נושאי הדיוןנושאי הדיון
עקיבה אחר מטרות איטיות בעזרת אלגוריתם עקיבה אחר מטרות איטיות בעזרת אלגוריתם ►IMMIMM . מסדר שני ושלישי . מסדר שני ושלישי
התמודדות עם סרט אמיתי בסביבה לא התמודדות עם סרט אמיתי בסביבה לא ►הומוגנית ורועשת )שיחים , רקע נע, מצלמה הומוגנית ורועשת )שיחים , רקע נע, מצלמה
מתנדנדת בשל הרוח (. מתנדנדת בשל הרוח (.
מטרות דומות עם תנועה ומימדים משתנים מטרות דומות עם תנועה ומימדים משתנים ►והתמזגות בנוף . והתמזגות בנוף .

רקע תאורטירקע תאורטימרכז כובד.מרכז כובד.►קורלציה.קורלציה.►קלמן פילטר.קלמן פילטר.►►IMMIMM..
שיטת מרכז הכובד:שיטת מרכז הכובד:מרכז כובד של אובייקט נתון ע"י:מרכז כובד של אובייקט נתון ע"י:
NN- - אובייקטאובייקט מס' הפיקסלים ב מס' הפיקסלים ב ; ;II- - הפיקסלים.הפיקסלים. ערכי ערכי
מרכז הכובד מהווה יעד לסימון, וסביב סימון זה מתעדכן חלון מרכז הכובד מהווה יעד לסימון, וסביב סימון זה מתעדכן חלון העקיבה. במחזור הבא, לאחר שהמטרה זזה בתוך חלון העקיבה העקיבה. במחזור הבא, לאחר שהמטרה זזה בתוך חלון העקיבה
הקיים, חוזרים שוב על תהליך חיפוש מרכז הכובד ועדכון חלון הקיים, חוזרים שוב על תהליך חיפוש מרכז הכובד ועדכון חלון העקיבה.העקיבה.
שיטות עקיבה מבוססות על עיבוד תמונהשיטות עקיבה מבוססות על עיבוד תמונה
N
ii
N
iii
c
I
xI
x
1
1
שיטת הקורלציהשיטת הקורלציהשיטה זו מסתמכת על השוואת חלון העקיבה לתמונת הרפרנס שיטה זו מסתמכת על השוואת חלון העקיבה לתמונת הרפרנס
העדכנית .העדכנית .
: :עיבוד תוצאות חישוב הקורלציהעיבוד תוצאות חישוב הקורלציהמעל סף גבוה : עדכון תמונת רפרנס המשך מעקב עפ"י מרכז מסה .מעל סף גבוה : עדכון תמונת רפרנס המשך מעקב עפ"י מרכז מסה .
ערך סף ביניים : אין עדכון תמונת רפרנס המשך מעקב עפ"י מרכז ערך סף ביניים : אין עדכון תמונת רפרנס המשך מעקב עפ"י מרכז מסה .מסה .
מתחת לסף נמוך : אין עדכון תמונת רפרנס חיזויי על פי קלמן פילטר .מתחת לסף נמוך : אין עדכון תמונת רפרנס חיזויי על פי קלמן פילטר .
1
2 2
1 1
( ) ( )
( ) ( )
N
i ii
N N
i ii i
A A B B
A A B B
מסנן קלמןמסנן קלמן ע"י רודולף קלמן. ע"י רודולף קלמן.19601960פותח בשנת פותח בשנת ►מורכב מסט של משוואות מתמטיות,מורכב מסט של משוואות מתמטיות,►
המיישמות משערך אופטימאלי במובן של מזעור המיישמות משערך אופטימאלי במובן של מזעור שונות השגיאה. שונות השגיאה.
עבודה בשני שלבים :עבודה בשני שלבים :► קבלת המדידה. קבלת המדידה.לפנילפני. חיזוי ווקטור המצב . חיזוי ווקטור המצב 11
. עדכון השערוך לאחר קבלת ערכי המדידה.. עדכון השערוך לאחר קבלת ערכי המדידה.22פעולת המסנן מאופיינת במחזוריות: פעולת המסנן מאופיינת במחזוריות: ►
מתבצע שערוך מראש של ווקטור המצב ובהמשך, מתבצע שערוך מראש של ווקטור המצב ובהמשך, תיקון הווקטור המשוערך לאחר כניסת המדידה. תיקון הווקטור המשוערך לאחר כניסת המדידה.
להמשךלהמשךלפירוטלפירוט

מסנן קלמן המשךמסנן קלמן המשךמסנן זה מפיק את המשערך של וקטור המצב הבא האופטימאלי מסנן זה מפיק את המשערך של וקטור המצב הבא האופטימאלי
במובן של מזעור שונות השגיאה.במובן של מזעור שונות השגיאה.::מודל המערכתמודל המערכת
zzווקטור המדידות – ווקטור המדידות – vvרעש המצב – רעש המצב – wwרעש המדידה – רעש המדידה –
( 1) ( ) ( ) ( )( ) ( ) ( ) ( )x k F k x k v kz k H k x k w k
1 0 0 0 0 0( ) ( )
0 0 0 1 0 0
x
x
x
y
y
y
locationvelocityacceleration
H k x k location
velocity
acceleration
2
2
11 T T 0 0 02
0 1 T 0 0 00 0 1 0 0 0
( )10 0 0 1 T T2
0 0 0 0 1 T0 0 0 0 0 1
F k
( ) ~ (0, )( ) ~ (0, )v k N Qw k N R

משוואות מסנן קלמןמשוואות מסנן קלמןPP. מטריצת הקוואריאנס של וקטור המצב בהינתן המדידות . – מטריצת הקוואריאנס של וקטור המצב בהינתן המדידות – xx. המשערך האופטימלי .- המשערך האופטימלי -
נציין כי החישוב הוא רקורסיבינציין כי החישוב הוא רקורסיביעדכון המדידה:עדכון המדידה:
עדכון המצב:עדכון המצב:
1
ˆ ˆ ˆ( | ) ( | 1) ( ) ( ) ( ) ( | 1)
1) ( ) ( | 1) ( ) ( ) ( | 1) ( )
( | ) ( | 1) ( ) ( ) ( | 1) ( ) ( ) ( | 1)
T T
x k k x k k K k z k H k x k k
K k P k k H k H k P k k H k R
P k k P k k K k H k P k k I K k H k P k k
ˆ ˆ( 1 | ) ( ) ( | )2)
( 1 | ) ( ) ( | ) ( )T
x k k F k x k k
P k k F k P k k F k Q

משוואות מסנן קלמן המשךמשוואות מסנן קלמן המשך, נוכל לקבל את המשערך, נוכל לקבל את המשערך((22)) ו – ו – ((11))ומשילוב של ומשילוב של ►
ˆ ˆ ˆ( 1 | ) ( ) ( | 1) ( ) ( ) ( ) ( ) ( | 1)x k k F k x k k F k K k z k H k x k k
IMM (Interactive Multiple IMM (Interactive Multipleאלגוריתם ה אלגוריתם ה Model)Model)
מטרת האלגוריתם היא לשפר את שערוך מיקום מטרת האלגוריתם היא לשפר את שערוך מיקום מרכזמרכז
הכובד של המטרה ע"י מתן שערוך המבוסס על הכובד של המטרה ע"י מתן שערוך המבוסס על ערבולערבול
מודלים שונים. מודלים שונים. המסננים אותם אנו מממשים הינם מסדר שני המסננים אותם אנו מממשים הינם מסדר שני
ושלישי.ושלישי.

בעזרת התרשים הבא: בעזרת התרשים הבא:IMMIMMניתן לתאר את אלגוריתם ה ניתן לתאר את אלגוריתם ה
Mixing
FilterNo. 1
FilterNo. 2
Mode probability update and mixing probability calculation
State estimate and covariance combination
1 1ˆ ( 1| 1), ( 1| 1)x k k P k k 2 2ˆ ( 1| 1), ( 1| 1)x k k P k k
01 01ˆ ( 1| 1), ( 1| 1)x k k P k k 02 02ˆ ( 1| 1), ( 1| 1)x k k P k k
1 1ˆ ( | ), ( | )x k k P k k 2 2ˆ ( | ), ( | )x k k P k k
( )z k ( )z k1( )k 2 ( )k
1( )k
2 ( )k
( | )k k
( )k
1 1ˆ ( | ), ( | )x k k P k k2 2ˆ ( | ), ( | )x k k P k k
( )k
ˆ( | )x k k
( | )P k k

IMMIMMפירוט אלגוריתם ה פירוט אלגוריתם ה
: : צעדי האלגוריתםצעדי האלגוריתםחישוב הסתברויות הערבול:חישוב הסתברויות הערבול:1.1.
שלב הערבול: שלב הערבול: 2.2.
rjikpc
kk iijj
ji ,....,1,111|1|
rjkkkkxkkx ji
r
i
ij ,....,11|11|1ˆ1|1ˆ |1
0
rj
kkxkkxkkxkkx
kkPkkkkP
Tjiji
r
i
iji
j
,....,1
1|1ˆ1|1ˆ1|1ˆ1|1ˆ
1|11|11|1
00
1|
0
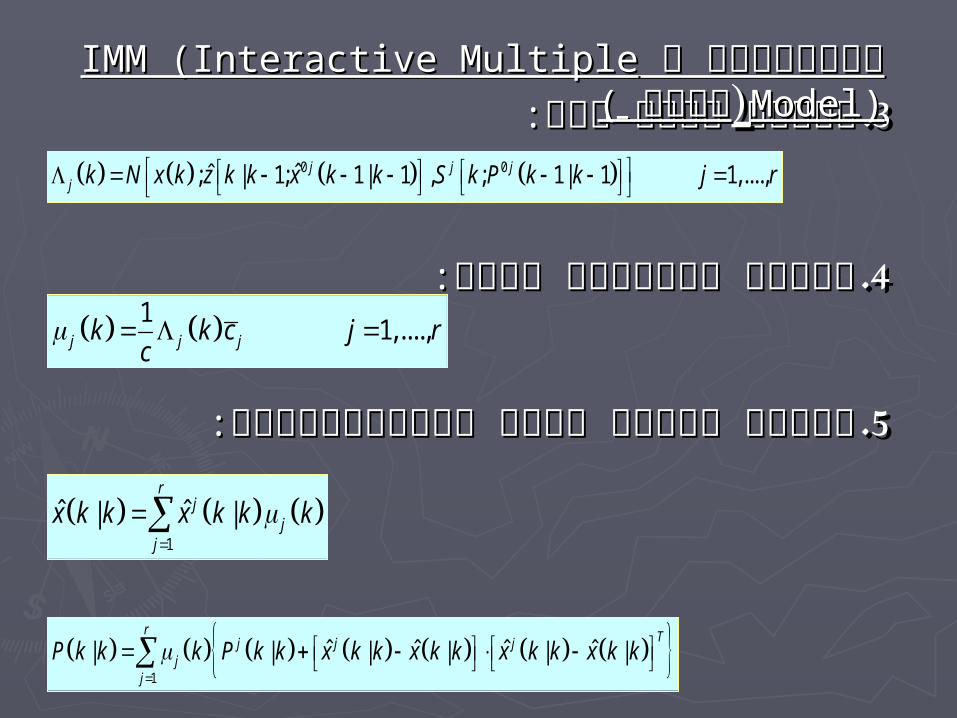
התאמת מודל-מצב:התאמת מודל-מצב:. . 33
עדכון הסתברות המצב:עדכון הסתברות המצב:. . 44
שקלול וקטור המצב והקוואריאנס:שקלול וקטור המצב והקוואריאנס:. . 55
0 0ˆˆ; | 1; 1| 1 , ; 1| 1 1,....,j j jj k N x k z k k x k k S k P k k j r
1 1,....,j j jk k c j rc
1
ˆ ˆ| |r
jj
j
x k k x k k k
1
ˆ ˆ ˆ ˆ| | | | | |r Tj j j
jj
P k k k P k k x k k x k k x k k x k k
IMM (Interactive Multiple Model)IMM (Interactive Multiple Model)אלגוריתם ה אלגוריתם ה המשך (המשך ())

פיתוח הנושאים לדיוןפיתוח הנושאים לדיון..IMM/KALMANIMM/KALMANעקיבה אחר מטרות בעזרת עקיבה אחר מטרות בעזרת ►
.שיפור מיקום חלון – עבור מטרות מהירות.שיפור מיקום חלון – עבור מטרות מהירות. "ניפוח חלון חיפוש כולל קורלציה "רצה" .ניפוח חלון חיפוש כולל קורלציה "רצהIMMIMM לעומת לעומת KALMANKALMAN
התמודדות עם סרט אמיתיהתמודדות עם סרט אמיתי►. מחיקת רקע .מחיקת רקע. תנודות מצלמה ורקע .תנודות מצלמה ורקע.מטרות בעלות צורה לא רציפה.מטרות בעלות צורה לא רציפה. חליפת מטרות .חליפת מטרות. גילוי לאחר יציאה מקרבה .גילוי לאחר יציאה מקרבה
שיפור מיקום החלון באמצעות שילוב שיפור מיקום החלון באמצעות שילוב מרכז מסה וקורלציהמרכז מסה וקורלציה
שיפור מיקום החלון נדרש בעיקר כאשר תנועת המטרה מהירה מגודל שיפור מיקום החלון נדרש בעיקר כאשר תנועת המטרה מהירה מגודל החלון , דבר שעלול לגרום לאיבוד המטרה.החלון , דבר שעלול לגרום לאיבוד המטרה.
.דוגמא לאיבוד מטרה ע"י תנועה מהירה.דוגמא לאיבוד מטרה ע"י תנועה מהירה
ישנם שתי דרכים להתמודד עם התופעה:ישנם שתי דרכים להתמודד עם התופעה:הגדלת חלון החיפוש – לשיטה זו חסרון בסביבה רועשת.הגדלת חלון החיפוש – לשיטה זו חסרון בסביבה רועשת.1.1.שיפור מיקום החלון – שיטה זו ממקמת את החלון במספר איטרציות שיפור מיקום החלון – שיטה זו ממקמת את החלון במספר איטרציות 2.2.
באמצעות שילוב בין שיטת מרכז המסה לבין שיטת הקורלציה .באמצעות שילוב בין שיטת מרכז המסה לבין שיטת הקורלציה .אופן השילוב : אופן השילוב :
מציאת מרכז מסה של חלון החיפוש.מציאת מרכז מסה של חלון החיפוש.א-א-בדיקת קורלציה.בדיקת קורלציה.ב-ב-עפ"י ערך הקורלציה(.עפ"י ערך הקורלציה(. אם יש צורך בשיפור מיקום החלון ) אם יש צורך בשיפור מיקום החלון )אאחזרה לשלב חזרה לשלב ג-ג-.דוגמא לשיפור מיקום החלון.דוגמא לשיפור מיקום החלון

ניפוח כולל קורלציה " רצה " .ניפוח כולל קורלציה " רצה " .בחיזוי תנועה של מטרה באזור נסתר ישנן מספר בעיות:בחיזוי תנועה של מטרה באזור נסתר ישנן מספר בעיות:
תמרון ) ואפילו תמרון קל ביותר – שינוי מהירות \ כיוון \תאוצה וכו'(תמרון ) ואפילו תמרון קל ביותר – שינוי מהירות \ כיוון \תאוצה וכו'(•שגיאת שיערוך מצטברת- בעקבות כניסה לחיזוי עם וקטור מצב שגוי.שגיאת שיערוך מצטברת- בעקבות כניסה לחיזוי עם וקטור מצב שגוי.•
בעיות אלו גורמות לחיזוי מוטעה של מיקום המטרה בזמן ההסתרה , דבר הפוגע ביכולת בעיות אלו גורמות לחיזוי מוטעה של מיקום המטרה בזמן ההסתרה , דבר הפוגע ביכולת הלכידה , ביציאה מההסתרה.הלכידה , ביציאה מההסתרה.
ע"י בחינת מספר פתרונות , מצאנו כי שימוש בחלון מתנפח הינו הפתרון היעיל ביותר .ע"י בחינת מספר פתרונות , מצאנו כי שימוש בחלון מתנפח הינו הפתרון היעיל ביותר .
תהליך ניפוח החלון:תהליך ניפוח החלון:עם זיהויי כניסה להסתרה אנו מגדילים את חלון החיפוש ,כל מספר צעדים ,במספר עם זיהויי כניסה להסתרה אנו מגדילים את חלון החיפוש ,כל מספר צעדים ,במספר 1(1(
פיקסלים לכל כיוון.פיקסלים לכל כיוון.כעת אנו מחפשים את המטרה ע"י בצוע החלקה של תמונת הרפרנס על החלון המנופח.כעת אנו מחפשים את המטרה ע"י בצוע החלקה של תמונת הרפרנס על החלון המנופח.2(2(עם מציאת המטרה החלון יקטן במספר שלבים ע"מ ללכוד את המטרה בצורה יעילה .עם מציאת המטרה החלון יקטן במספר שלבים ע"מ ללכוד את המטרה בצורה יעילה .3(3(
דוגמא לניפוח חלוןדוגמא לניפוח חלון
IMMIMM לעומת לעומת KALMANKALMANהשוואה זו מתבקשת ע"מ לעמוד על היתרונות של השוואה זו מתבקשת ע"מ לעמוד על היתרונות של ►
IMMIMMההעל מנת להתמודד עם מטרות שתנועתן אינה קבועה על מנת להתמודד עם מטרות שתנועתן אינה קבועה ►
)ולעיתים אף כאשר תאוצתן אינה קבועה( נשאף )ולעיתים אף כאשר תאוצתן אינה קבועה( נשאף להתאים את מודל המסנן שלנו לסוג התנועה הנוכחית להתאים את מודל המסנן שלנו לסוג התנועה הנוכחית
)מסנן מסתגל()מסנן מסתגל(בסרט הבא נראה תנועה בעלת מהירויות ותאוצות בסרט הבא נראה תנועה בעלת מהירויות ותאוצות ►
מסדר שני מסדר שני IMMIMMמשתנה – חיזוי התנועה מתבצע ע"י משתנה – חיזוי התנועה מתבצע ע"י ושלישי בלבד.ושלישי בלבד.
סרטון המראה תנועה בעלת מהירויות ותאוצות משתנותסרטון המראה תנועה בעלת מהירויות ותאוצות משתנות
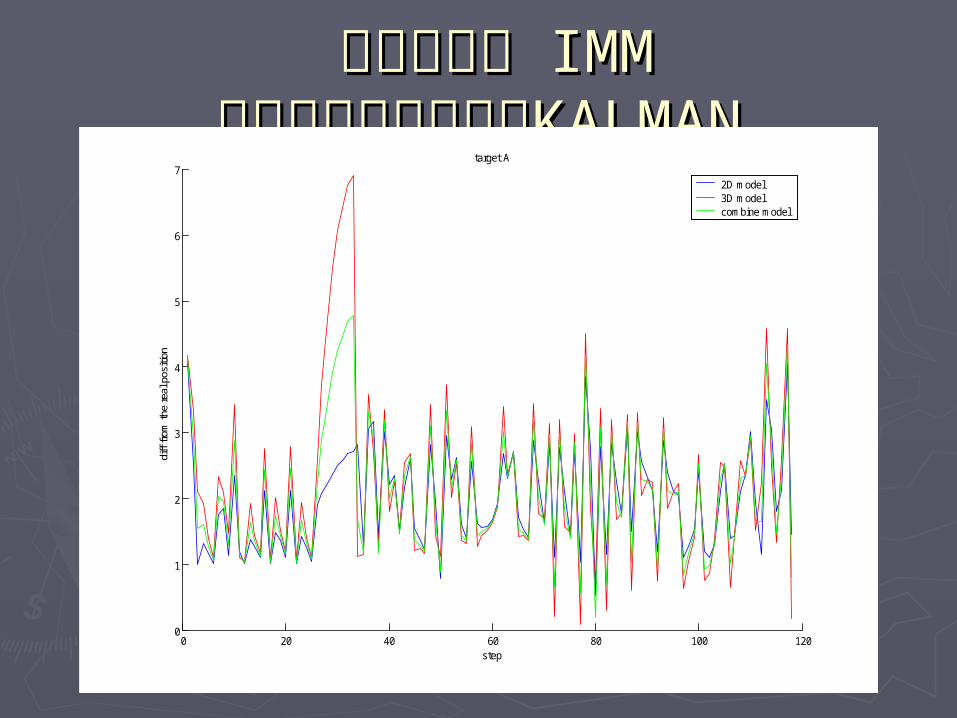
IMMIMM לעומת לעומת KALMANKALMANסטטיסטיקהסטטיסטיקה
0 20 40 60 80 100 1200
1
2
3
4
5
6
7target A
step
diff
from
the
real
pos
ition
2D model3D modelcombine model
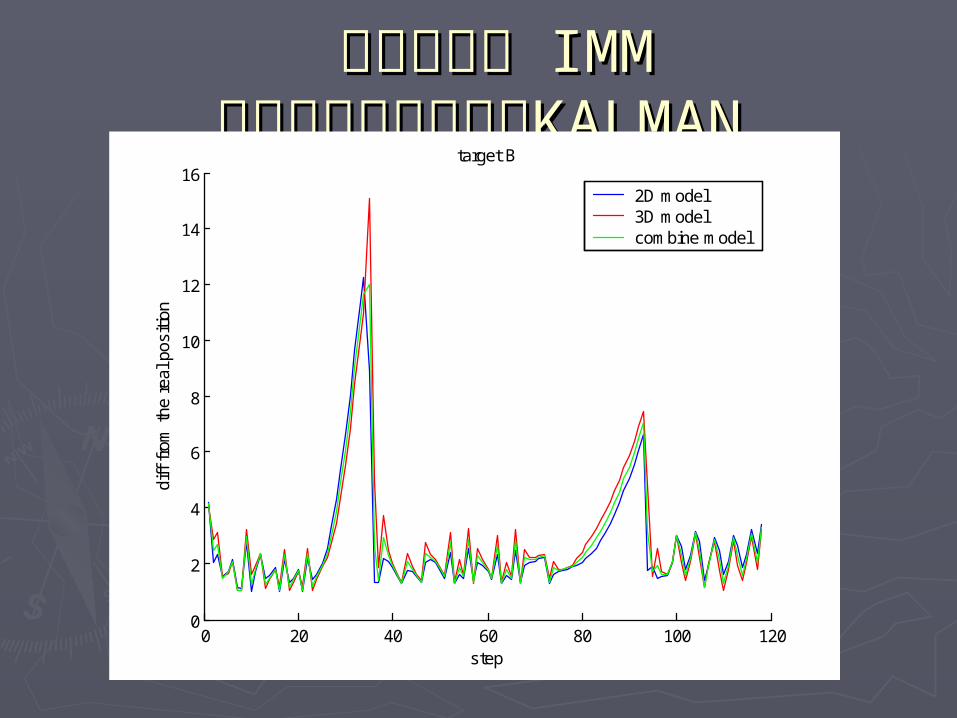
IMMIMM לעומת לעומת KALMANKALMANסטטיסטיקהסטטיסטיקה
0 20 40 60 80 100 1200
2
4
6
8
10
12
14
16target B
step
diff
from
the
real
pos
ition
2D model3D modelcombine model
מחיקת רקעמחיקת רקעבהתמודדות עם סרטים אמיתיים אנו נתקלים במספר בעיות שהעיקרית הינה זיהוי המטרה בהתמודדות עם סרטים אמיתיים אנו נתקלים במספר בעיות שהעיקרית הינה זיהוי המטרה
כאשר הרקע אינו הומוגני , ולפעמים המטרה נטמעת בו.כאשר הרקע אינו הומוגני , ולפעמים המטרה נטמעת בו.לצורך נטרול השפעת הסביבה ככל האפשר , אנו נרצה "למחוק" את הרקע .לצורך נטרול השפעת הסביבה ככל האפשר , אנו נרצה "למחוק" את הרקע .
שלבי מחיקת הרקע:שלבי מחיקת הרקע:רכישת תמונת רפרנס )תמונה של האזור ללא המטרות( .רכישת תמונת רפרנס )תמונה של האזור ללא המטרות( .1.1. -מתקבלת תמונה " חלקה " שבה אמורות -מתקבלת תמונה " חלקה " שבה אמורות FRAMEFRAMEחיסור תמונת הרפרנס מכל חיסור תמונת הרפרנס מכל 2.2.
להופיע רק המטרות שלנו .להופיע רק המטרות שלנו .הפיכת התמונה לתמונת שחור\לבן .הפיכת התמונה לתמונת שחור\לבן .3.3.
((REDRED* שלב זה מתבצע על שכבה אחת משלושת שכבות הצבע )בחרנו * שלב זה מתבצע על שכבה אחת משלושת שכבות הצבע )בחרנו
דוגמא למחיקת רקעדוגמא למחיקת רקע

תנודות מצלמה ורקעתנודות מצלמה ורקע
כפי שראינו בדוגמא הקודמת , לשיטה זו של מחיקת הרקע ישנם כפי שראינו בדוגמא הקודמת , לשיטה זו של מחיקת הרקע ישנם כמה בעיות)בעיקר בשל הרוח(כמה בעיות)בעיקר בשל הרוח(
תנודות המצלמה )בעיקר בתמונות רחוקות\בעלות גזרה רחבה(.תנודות המצלמה )בעיקר בתמונות רחוקות\בעלות גזרה רחבה(.•תנודות פריטים בנוף )בעיקר שיחים(.תנודות פריטים בנוף )בעיקר שיחים(.•
ההתמודדות עם בעיות אלו ושימת דגש על גזרה רחבה מתבצעת ההתמודדות עם בעיות אלו ושימת דגש על גזרה רחבה מתבצעת מסנן גאוסי סטנדרטי.מסנן גאוסי סטנדרטי.באמצעות פתרון פשוט ומוכר : באמצעות פתרון פשוט ומוכר :
התהליך הינו פשוט:התהליך הינו פשוט:(החלקת תמונת הרפרנס )משקל גבוה לפיקסל עצמו( .(החלקת תמונת הרפרנס )משקל גבוה לפיקסל עצמו( .11 הרלוונטי כנ"ל . הרלוונטי כנ"ל .FRAMEFRAME( החלקת ה ( החלקת ה 22
(מציאת ההפרש בין התמונות.(מציאת ההפרש בין התמונות.33 דוגמא להתמודדות עם רוח ותנודות מצלמהדוגמא להתמודדות עם רוח ותנודות מצלמה
מטרות בעלות צורה לא מטרות בעלות צורה לא רציפה-הבעיהרציפה-הבעיה
כאשר ישנה מטרה אשר צורתה אינה רציפה,לדוגמא בעלת כאשר ישנה מטרה אשר צורתה אינה רציפה,לדוגמא בעלת חלון גדול, מתעוררת בעיה.חלון גדול, מתעוררת בעיה.
בשיטת מרכז המסה ,חלון העקיבה ימורכז סביב מרכז המסה.בשיטת מרכז המסה ,חלון העקיבה ימורכז סביב מרכז המסה.במקרה שהמטרה לא רציפה, מרכז חלון החיפוש לא יהיה במקרה שהמטרה לא רציפה, מרכז חלון החיפוש לא יהיה
סביב מרכז המטרה.סביב מרכז המטרה.תופעה זו לדעתנו משמעותית יותר כאשר המטרה משנה את תופעה זו לדעתנו משמעותית יותר כאשר המטרה משנה את
כיוונה ו"החור" משנה את צורתו .כיוונה ו"החור" משנה את צורתו .התמודדותנו עם תופעה זו תתואר בשקף הבא . התמודדותנו עם תופעה זו תתואר בשקף הבא .
מטרות בעלות צורה לא מטרות בעלות צורה לא רציפה-פתרוןרציפה-פתרון
ע"י הרחבת כל פיקסל למטריצה ע"י הרחבת כל פיקסל למטריצה BWBWאנו ממלאים את החורים על בסיס תמונת ה- אנו ממלאים את החורים על בסיס תמונת ה- 55**55. .
אלגוריתם זה אומנם מגדיל לנו את מסגרת המטרה בשני פיקסלים לכל כיוון,אך הרווח אלגוריתם זה אומנם מגדיל לנו את מסגרת המטרה בשני פיקסלים לכל כיוון,אך הרווח שלנו הוא בהגדלת רציפות המטרה.שלנו הוא בהגדלת רציפות המטרה.
בנוסף צריך לזכור שההוספה היא מארבעת הכיוונים כך שההשפעה הכוללת כמעט בנוסף צריך לזכור שההוספה היא מארבעת הכיוונים כך שההשפעה הכוללת כמעט אינה משמעותית ,לקביעת מרכז המטרה .אינה משמעותית ,לקביעת מרכז המטרה .
דוגמא לפתרון של מטרות לא רציפותדוגמא לפתרון של מטרות לא רציפות
חליפת מטרותחליפת מטרותכאשר המטרות מתקרבות אחת לשנייה חלונות החיפוש )ולעיתים אף הרקע( כאשר המטרות מתקרבות אחת לשנייה חלונות החיפוש )ולעיתים אף הרקע(
משפיעים אחד על השני )קבלת מידע מ"השכן"(. משפיעים אחד על השני )קבלת מידע מ"השכן"(. מידע זה גורר שגיאה בעקיבה שיכולה לגרור איבוד המטרה או רכישת מטרה לא מידע זה גורר שגיאה בעקיבה שיכולה לגרור איבוד המטרה או רכישת מטרה לא
נכונה.נכונה.
*הפתרון – אלגוריתם לעקיבה אחר מטרות קרובות . *הפתרון – אלגוריתם לעקיבה אחר מטרות קרובות .
דוגמא לחליפת מטרותדוגמא לחליפת מטרות

אלגוריתם לעקיבה אחר מטרות אלגוריתם לעקיבה אחר מטרות קרובותקרובות
כאשר המטרות מתקרבות אחת לשנייה )מתחת לסף קרבה מסוים( המערכת כאשר המטרות מתקרבות אחת לשנייה )מתחת לסף קרבה מסוים( המערכת •משנה תצורת עקיבה.משנה תצורת עקיבה.
בשלב זה נייצר לכל מטרה תמונת רפרנס עדכנית.בשלב זה נייצר לכל מטרה תמונת רפרנס עדכנית.•נפתח חלון חיפוש המכיל את שתי המטרות,מרכזו במרכז הקו המחבר את מרכזי נפתח חלון חיפוש המכיל את שתי המטרות,מרכזו במרכז הקו המחבר את מרכזי •
חלונות החיפוש הקטנים.חלונות החיפוש הקטנים.כעת בתוך החלון הגדול אנו מחפשים את שני הגופים הגדולים ביותר )באמצעות כעת בתוך החלון הגדול אנו מחפשים את שני הגופים הגדולים ביותר )באמצעות •
שיטות עיבוד תמונה(.שיטות עיבוד תמונה(.נבדוק את הגודל המינימאלי של המטרות -ע"מ לוודא שלא עוקבים אחרי "רעש".נבדוק את הגודל המינימאלי של המטרות -ע"מ לוודא שלא עוקבים אחרי "רעש".•העקיבה תתבצע אחר מרכז מסה אחד לפחות, בחלון הגדול-במקרה שלא העקיבה תתבצע אחר מרכז מסה אחד לפחות, בחלון הגדול-במקרה שלא •
(. (. IMMIMMנצפית אף מטרה , מיקום המטרות יהי ע"פ חיזוי הקלמן )נצפית אף מטרה , מיקום המטרות יהי ע"פ חיזוי הקלמן ) . .FRAMEFRAMEעל מנת לתאם כל עוקב למטרתו , נבצע בדיקת קורלציה כל על מנת לתאם כל עוקב למטרתו , נבצע בדיקת קורלציה כל •ברגע שמרחק מרכזי הגופים גדול מערך הסף אנו חוזרים לחלונות חיפוש רגילים ברגע שמרחק מרכזי הגופים גדול מערך הסף אנו חוזרים לחלונות חיפוש רגילים •
ואופן חיפוש רגיל.ואופן חיפוש רגיל.
תנועה איטיתתנועה איטיתמעקב וחיזויי בעזרת מסנן קלמן בעייתי )אם לא לומר אפילו בלתי אפשרי ( במהירויות מעקב וחיזויי בעזרת מסנן קלמן בעייתי )אם לא לומר אפילו בלתי אפשרי ( במהירויות
נמוכות ובמיוחד בתנאי תנועה משתנה ומורעשת .נמוכות ובמיוחד בתנאי תנועה משתנה ומורעשת .תנועה איטית בסביבה בדידה )פיקסלים( מאופיינת ביחס אות לרעש נמוכים תנועה איטית בסביבה בדידה )פיקסלים( מאופיינת ביחס אות לרעש נמוכים
)קוונטיזציה( )קוונטיזציה( ומכאן הקלמן לומד מנתונים בעייתיים.ומכאן הקלמן לומד מנתונים בעייתיים.
התוצאה:התוצאה:חיזוי שגוי המאבד את המטרות לעיתים קרובות מדי ולכן אינו שמיש .חיזוי שגוי המאבד את המטרות לעיתים קרובות מדי ולכן אינו שמיש .
נמחיש בעיה זו בעזרת דוגמא מספרית:נמחיש בעיה זו בעזרת דוגמא מספרית: פיקסלים לדגימה. פיקסלים לדגימה.8.518.51נניח תנועה במהירות של נניח תנועה במהירות של
..99 ל ל 0.50.5 פיקסלים - יחס של כ פיקסלים - יחס של כ 99 נתוני הקלמן יהיו נתוני הקלמן יהיו ..33 ל ל 0.50.5 פיקסלים לדגימה ,היחס יהיה פיקסלים לדגימה ,היחס יהיה 2.52.5לעומת זאת בתנועה במהירות של לעומת זאת בתנועה במהירות של
כאשר שגיאה זו מתקבלת בסמוך לכניסה להסתרה , גורל העקיבה נחרץ !!!כאשר שגיאה זו מתקבלת בסמוך לכניסה להסתרה , גורל העקיבה נחרץ !!!

סיכום-שילוב קלמן עם טכניקות עיבוד סיכום-שילוב קלמן עם טכניקות עיבוד תמונהתמונה
שיטת העקיבה היעילה לדעתנו הינה שילוב בין קלמן לבין שיטות עיבוד שיטת העקיבה היעילה לדעתנו הינה שילוב בין קלמן לבין שיטות עיבוד תמונה.תמונה.
כאשר המטרות רחוקות אנו עוקבים בשיטה הרגילה )מרכז מסה בשילוב כאשר המטרות רחוקות אנו עוקבים בשיטה הרגילה )מרכז מסה בשילוב קורלציה( וחוזים בעזרת קלמן במצב הסתרה .קורלציה( וחוזים בעזרת קלמן במצב הסתרה .
כאשר המטרות מתקרבות אחת לשנייה אנו עוברים לשיטת עיבוד כאשר המטרות מתקרבות אחת לשנייה אנו עוברים לשיטת עיבוד תמונה .תמונה .
במצב זה הקלמן ממשיך ללמוד כל עד המטרות לא התחברו .במצב זה הקלמן ממשיך ללמוד כל עד המטרות לא התחברו .
עם יציאה מקרבה המצב יחזור לקדמותו .עם יציאה מקרבה המצב יחזור לקדמותו .
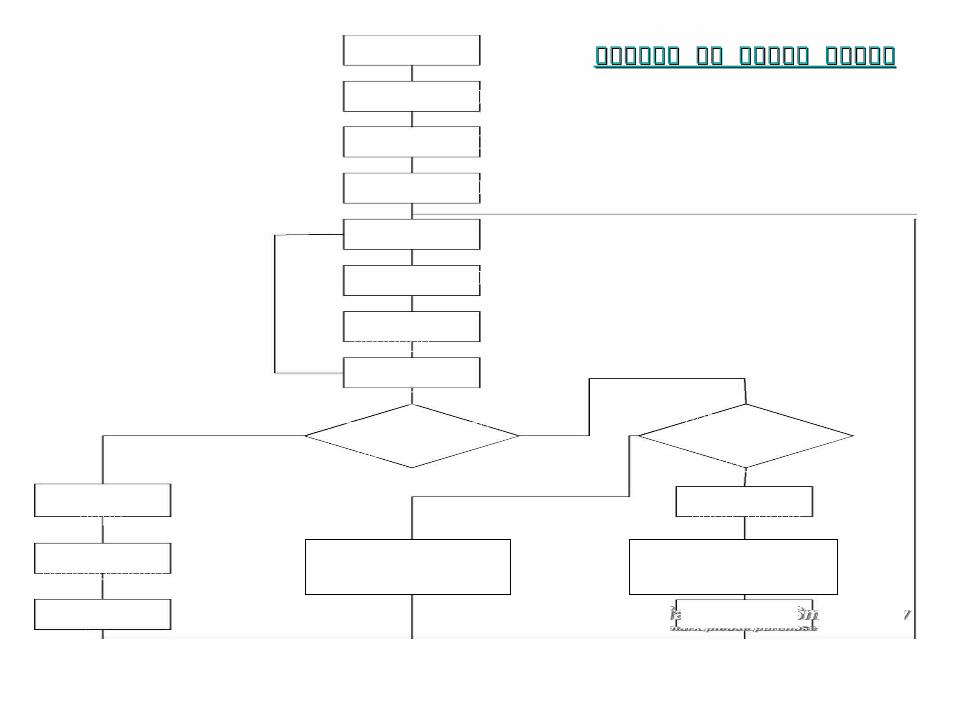
סימון מטרה
עיבוד תמונה
חלון חיפוש
מרכוז ראשוני
בניית חלון
בדיקת קורלציה
שיפור מיקום חלון
חיפוש מ מסה
בדיקת קורלציה סופית
בדיקת קירבה
אלגוריתם מטרות קרובות
מנגנון עדכון תמונת רפרנס
מנגנון כיווץ חלון
חיזוי קלמן
שינוי קואורדינטות
ניפוח חלון לימוד קלמן
תרשים זרימה של המערכתתרשים זרימה של המערכת
הדגמותהדגמותעקיבה אחר שתי מטרות סינטטיות )מהירות משתנה , הסתרה (.עקיבה אחר שתי מטרות סינטטיות )מהירות משתנה , הסתרה (.►עקיבה אחר שתי מטרות המסתירות אחת את השנייה.עקיבה אחר שתי מטרות המסתירות אחת את השנייה.►עקיבה אחר שתי מטרות המסתירות החולפות אחת מעל את עקיבה אחר שתי מטרות המסתירות החולפות אחת מעל את ►
השנייה , תנועת בננה )מהירות משתנה(.השנייה , תנועת בננה )מהירות משתנה(.עקיבה אחר שתי מטרות הנוסעות במקביל ) הסתרה חלקית , עקיבה אחר שתי מטרות הנוסעות במקביל ) הסתרה חלקית , ►
איבוד מטרות (איבוד מטרות (עקיבה אחר שתי מטרות המשנות כיוון , חולפות אחת על פני עקיבה אחר שתי מטרות המשנות כיוון , חולפות אחת על פני ►
רעותה , ומוסתרות מיד.רעותה , ומוסתרות מיד.
נספחיםנספחים
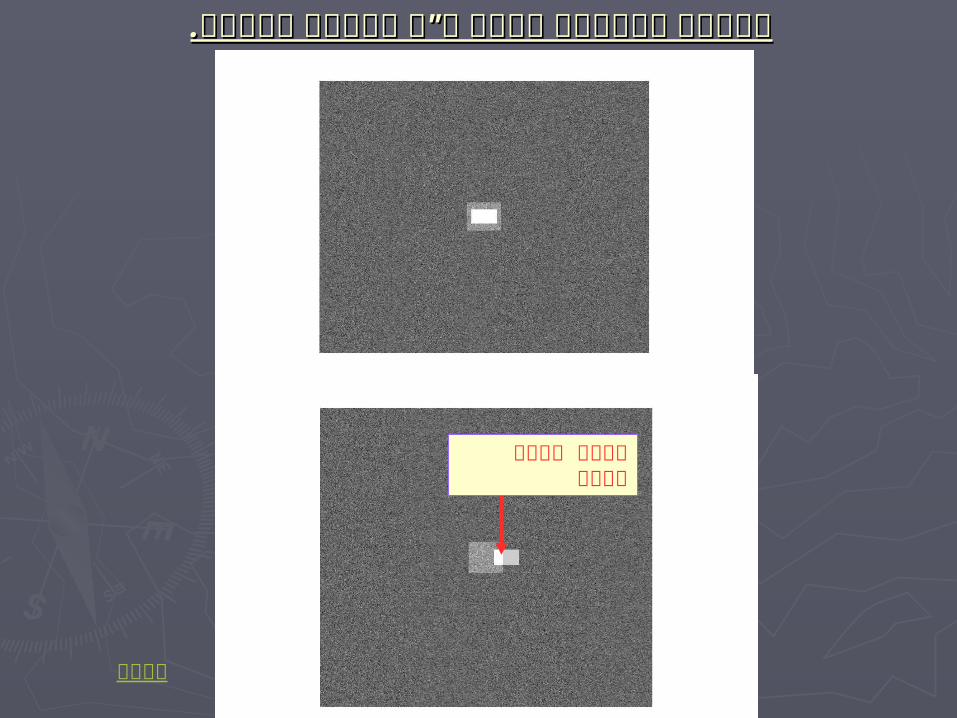
מרכז המסה החדש
דוגמא לאיבוד מטרה ע"י תנועה מהירה.דוגמא לאיבוד מטרה ע"י תנועה מהירה.
חזרה

..11דוגמא לשיפור מיקום החלון-דוגמא לשיפור מיקום החלון-
..22דוגמא לשיפור מיקום החלון-דוגמא לשיפור מיקום החלון-
..33דוגמא לשיפור מיקום החלון-דוגמא לשיפור מיקום החלון-
חזרה

דוגמא לניפוח חלוןדוגמא לניפוח חלון
חזרה

דוגמא למחיקת רקע- תמונת המקורדוגמא למחיקת רקע- תמונת המקור

עליה מתבצע העיבוד עליה מתבצע העיבודREDREDדוגמא למחיקת רקע – מסכת ה דוגמא למחיקת רקע – מסכת ה

דוגמא למחיקת רקע – תמונת ההפרש בין המקור לרפרנס )ללא פילטר(דוגמא למחיקת רקע – תמונת ההפרש בין המקור לרפרנס )ללא פילטר(
חזרה

עליה מתבצע העיבוד עליה מתבצע העיבודREDREDדוגמא למחיקת רקע – מסכת ה דוגמא למחיקת רקע – מסכת ה

דוגמא למחיקת רקע והתמודדות עם "רעשים" –דוגמא למחיקת רקע והתמודדות עם "רעשים" – תמונת ההפרש בין המקור לרפרנס )ללא פילטר( תמונת ההפרש בין המקור לרפרנס )ללא פילטר(

לאחר העברת המסנן לאחר העברת המסנןREDREDדוגמא למחיקת רקע – מסכת ה דוגמא למחיקת רקע – מסכת ה

דוגמא למחיקת רקע והתמודדות עם "רעשים"–דוגמא למחיקת רקע והתמודדות עם "רעשים"– תמונת ההפרש בין המקור לרפרנס )לאחר פילטר( תמונת ההפרש בין המקור לרפרנס )לאחר פילטר(

דוגמא קיצונית להתמודדות עם "רעשים"–דוגמא קיצונית להתמודדות עם "רעשים"–המחשת תמונת ההפרש לאחר בינריזציה )ללא פילטר(המחשת תמונת ההפרש לאחר בינריזציה )ללא פילטר(
דוגמא קיצונית להתמודדות עם "רעשים"–דוגמא קיצונית להתמודדות עם "רעשים"– תמונת ההפרש לאחר בינריזציה )לאחר פילטר( תמונת ההפרש לאחר בינריזציה )לאחר פילטר(
חזרה

דוגמא לניפוח מטרה לא רציפה –דוגמא לניפוח מטרה לא רציפה – מטרות לאחר בינריזציה )ללא ניפוח( מטרות לאחר בינריזציה )ללא ניפוח(

דוגמא לניפוח מטרה לא רציפה –דוגמא לניפוח מטרה לא רציפה – מטרות לאחר בינריזציה )לאחר ניפוח( מטרות לאחר בינריזציה )לאחר ניפוח(
חזרה
דוגמא לחליפת מטרות – מידע שגוי מה"שכן"דוגמא לחליפת מטרות – מידע שגוי מה"שכן"
חזרה